KR101420959B1 - 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치 - Google Patents
하이브리드 차량의 액셀러레이터 페달 답력 제어 장치 Download PDFInfo
- Publication number
- KR101420959B1 KR101420959B1 KR1020127030745A KR20127030745A KR101420959B1 KR 101420959 B1 KR101420959 B1 KR 101420959B1 KR 1020127030745 A KR1020127030745 A KR 1020127030745A KR 20127030745 A KR20127030745 A KR 20127030745A KR 101420959 B1 KR101420959 B1 KR 101420959B1
- Authority
- KR
- South Korea
- Prior art keywords
- accelerator opening
- opening degree
- accelerator
- pedal
- vehicle
- Prior art date
Links
- 230000000881 depressing effect Effects 0.000 title 1
- 238000002485 combustion reaction Methods 0.000 claims abstract description 8
- 230000007423 decrease Effects 0.000 claims description 7
- 230000001133 acceleration Effects 0.000 claims description 6
- 230000005540 biological transmission Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000002542 deteriorative effect Effects 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangements or mounting of propulsion unit control devices in vehicles
- B60K26/02—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements
- B60K26/021—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements with means for providing feel, e.g. by changing pedal force characteristics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangements or mounting of propulsion unit control devices in vehicles
- B60K26/04—Arrangements or mounting of propulsion unit control devices in vehicles of means connecting initiating means or elements to propulsion unit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
- B60W2540/103—Accelerator thresholds, e.g. kickdown
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Control Of Throttle Valves Provided In The Intake System Or In The Exhaust System (AREA)
Abstract
본 발명에 따른 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치는, 액셀러레이터 개방도가 액셀러레이터 개방도 임계값을 초과해서 커지면, 액셀러레이터 페달의 답력을 베이스 답력보다도 증가시키고, 상기 전동기만을 구동해서 차량을 주행하는 제1 주행 모드로부터 상기 내연 기관을 구동하는 제2 주행 모드로 바뀌는 액셀러레이터 개방도에 기초하여 제1 액셀러레이터 개방도를 설정하고, 각 차속으로 일정속 주행 가능한 액셀러레이터 개방도에 기초한 제2 액셀러레이터 개방도를 설정하고, 제1 액셀러레이터 개방도와 제2 액셀러레이터 개방도 중 더 큰 것을 액셀러레이터 개방도 임계값으로 설정한다.
Description
본 발명은, 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치에 관한 것이다.
특허 문헌 1에는, 차량의 구동원으로서, 모터와 내연 기관을 구비한 하이브리드 차량에 있어서, 모터 단독으로 차량을 주행시키는 제1 주행 모드로부터 모터 및 내연 기관의 병용에 의해 차량을 주행시키는 제2 주행 모드로의 이행 시에, 액셀러레이터 페달의 답력 특성을 변화시켜, 액셀러레이터 페달의 스텝핑에 대한 저항력을 증가시킴으로써, 운전자에 뜻에 반대하여 주행 모드가 이행하여 내연 기관이 시동해서 연비가 악화되지 않도록 한 기술이 개시되어 있다.
이 특허 문헌 1에 있어서는, 액셀러레이터 페달의 스텝핑에 대한 저항력을 증가시키는 액셀러레이터 개방도가 가변 설정 가능하게 되어 있지만, 액셀러레이터 페달의 스텝핑에 대한 저항력을 증가시키는 액셀러레이터 개방도가 작아지면, 액셀러레이터 페달이 스텝핑되기 어려워져, 차량이 가속하기 어려워진다고 하는 문제가 있다.
따라서, 본 발명은, 액셀러레이터 개방도가 소정의 액셀러레이터 개방도 임계값을 넘어서 커지면, 액셀러레이터 페달의 답력을 베이스 답력보다도 증가시키는 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치에 있어서, 상기 소정의 액셀러레이터 개방도 임계값은, 상기 전동기만을 구동하여 차량을 주행하는 제1 주행 모드로부터 상기 내연 기관을 구동하는 제2 주행 모드로 바뀌는 모드 전환 액셀러레이터 개방도에 기초하여 설정된 제1 액셀러레이터 개방도이며, 이 제1 액셀러레이터 개방도에는, 소정의 하한값이 설정되어 있는 것을 특징으로 하고 있다.
본 발명에 따르면, 제1 액셀러레이터 개방도에 하한값을 마련함으로써, 액셀러레이터 페달을 일정 이상 스텝핑하는 것이 가능해져, 차량의 가속성을 확보할 수 있다.
도 1은 본 발명이 적용되는 하이브리드 차량의 파워 트레인계의 개략 구성을 모식적으로 도시한 설명도이다.
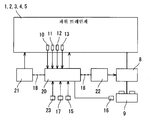
도 2는 본 발명이 적용되는 하이브리드 차량의 시스템 구성도이다.
도 3은 엔진 시동 정지선 맵의 특성 예를 나타내는 설명도이다.
도 4는 본 발명에 관한 액셀러레이터 페달 답력 제어 장치의 시스템 구성을 답력 변경 기구의 개략과 함께 모식적으로 도시한 설명도이다.
도 5는 본 발명에 있어서의 답력 변경 기구의 일 실시예를 모식적으로 도시하는 설명도이다.
도 6은 본 발명에 있어서의 액셀러레이터 페달 답력의 특성을 도시하는 특성도이다.
도 7은 액셀러레이터 개방도 임계값의 특성 예를 나타내는 설명도이며, (a)은 배터리의 SOC가 높은 경우의 특성 예를 나타내고, (b)는 배터리의 SOC가 낮은 경우의 특성 예를 나타낸다.
도 8은 본 발명에 관한 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치의 제어의 흐름을 도시하는 흐름도이다.
도 2는 본 발명이 적용되는 하이브리드 차량의 시스템 구성도이다.
도 3은 엔진 시동 정지선 맵의 특성 예를 나타내는 설명도이다.
도 4는 본 발명에 관한 액셀러레이터 페달 답력 제어 장치의 시스템 구성을 답력 변경 기구의 개략과 함께 모식적으로 도시한 설명도이다.
도 5는 본 발명에 있어서의 답력 변경 기구의 일 실시예를 모식적으로 도시하는 설명도이다.
도 6은 본 발명에 있어서의 액셀러레이터 페달 답력의 특성을 도시하는 특성도이다.
도 7은 액셀러레이터 개방도 임계값의 특성 예를 나타내는 설명도이며, (a)은 배터리의 SOC가 높은 경우의 특성 예를 나타내고, (b)는 배터리의 SOC가 낮은 경우의 특성 예를 나타낸다.
도 8은 본 발명에 관한 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치의 제어의 흐름을 도시하는 흐름도이다.
이하, 본 발명의 일 실시예를 도면에 기초하여 상세하게 설명한다.
도 1은, 본 발명이 적용되는 하이브리드 차량의 파워 트레인계의 개략 구성을 모식적으로 나타낸 설명도이다.
내연 기관인 엔진(1)의 출력축과 발전기로서도 기능하는 전동기로서의 모터 제너레이터2(MG)의 입력축이, 토크 용량 가변의 제1 클러치(4)(CL1)를 통해서 연결되어 있다. 모터 제너레이터(2)의 출력축은, 자동 변속기(3)(AT)의 입력축이 연결되고, 자동 변속기(3)의 출력축에는 차동 기어(6)를 통해서 타이어(7)가 연결되어 있다.
자동 변속기(3)는, 예를 들어, 전진 5속 후퇴 1속이나 전진 6속 후퇴 1속 등의 유단계의 변속비를 차속이나 액셀러레이터 개방도 등에 따라서 자동적으로 전환하는(변속 제어를 행함) 것이다.
그리고, 시프트 상태에 따라서 다른 자동 변속기(3) 내의 동력 전달을 담당하고 있는 토크 용량 가변의 클러치 중 1개가, 제2 클러치(5)(CL2)로서 사용되고 있다. 바꾸어 말하면, 제2 클러치(5)는, 자동 변속기(3)의 변속 요소로서 설치되어 있는 복수의 마찰 체결 요소 중, 각 변속단의 동력 전달 경로에 존재하는 마찰 체결 요소를 유용한 것이며, 실질적으로 자동 변속기(3)의 내부에 구성된 것이다.
자동 변속기(3)는, 제1 클러치(4)를 통해서 입력되는 엔진(1)의 동력과, 모터 제너레이터(2)로부터 입력되는 동력을 합성해서 타이어(7)로 출력한다. 또한, 제1 클러치(4)와 제2 클러치(5)에는, 예를 들어 비례 솔레노이드로 작동유의 유량 및 유압을 연속적으로 제어할 수 있는 습식 다판 클러치가 사용된다.
이 파워 트레인계에는, 제1 클러치(4)의 접속 상태에 따라서 2개의 운전 모드가 있다. 즉, 제1 클러치(4)가 절단된 상태에서는, 모터 제너레이터(2)의 동력만으로 주행하는 EV 모드로 되고, 제1 클러치(4)가 접속된 상태에서는, 엔진(1)과 모터 제너레이터(2)의 동력으로 주행하는 HEV 모드로 된다.
또한, 도 1에 있어서, 10은 엔진(1)의 회전수를 검출하는 엔진 회전 센서, 11은 모터 제너레이터(2)의 회전수를 검출하는 MG 회전 센서, 12는 자동 변속기(3)의 입력축 회전수를 검출하는 AT 입력 회전 센서, 13은 자동 변속기(2)의 출력축 회전수를 검출하는 AT 출력 회전 센서이며, 이들 각 센서의 검출 신호는, 후술하는 통합 컨트롤러(20)에 입력되어 있다.
도 2는, 본 발명이 적용되는 하이브리드 차량의 시스템 구성도를 나타내고 있다. 이 하이브리드 차량은, 차량을 통합 제어하는 통합 컨트롤러(20)와, 엔진(1)을 제어하는 엔진 컨트롤러(21)와, 모터 제너레이터(2)를 제어하는 MG 컨트롤러(22)를 갖고 있다.
통합 컨트롤러(20)는, 서로 정보 교환이 가능한 통신선(18)을 통하여, 엔진 컨트롤러(21) 및 MG 컨트롤러(22)에 접속되어 있다.
이 통합 컨트롤러(20)에는, 상술한 엔진 회전 센서(10), MG 회전 센서(11), AT 입력 회전 센서(12) 및 AT 출력 회전 센서(13)로부터의 검출 신호 이외에도, 차속을 검출하는 차속 센서(15), 모터 제너레이터(2)에 전력을 공급하는 배터리(9)의 충전 상태(SOC)를 검출하는 SOC 센서(16), 액셀러레이터 개방도(APO)를 검출하는 액셀러레이터 개방도 센서(17), 브레이크 유압을 검출하는 브레이크 유압 센서(23) 등의 각종 센서로부터의 검출 신호가 입력되어 있다.
그리고, 통합 컨트롤러(20)는, 액셀러레이터 개방도와 배터리(9)의 SOC와, 차속에 따라, 운전자가 원하는 구동력을 실현할 수 있는 운전 모드를 선택하고, MG 컨트롤러(22)에 목표 MG 토크 혹은 목표 MG 회전수를 지령하고, 엔진 컨트롤러(21)에 목표 엔진 토크를 지령한다. 또한, 제1 클러치(4) 및 제2 클러치(5)는, 통합 컨트롤러(20)로부터의 지령에 기초하여, 체결 및 개방이 제어되고 있다.
또한, 통합 컨트롤러(20)에서는, 차속과 액셀러레이터 개방도를 사용하여, 엔진(1)의 운전 모드를 연산한다. 즉, 도 3에 나타낸 엔진 시동 정지선 맵을 사용하여, 엔진 시동해야 할 운전 상태인지, 엔진 정지해야 할 운전 상태인지를 판정한다. 엔진 시동선 및 엔진 정지선은, 배터리(9)의 SOC가 낮아짐에 따라서, 액셀러레이터 개방도가 작아지는 방향(도 3에 있어서의 하방)으로 변화된다. 또한, 배터리(9)의 SOC가 같은 상태이면, 엔진 정지선은 엔진 시동선보다도 액셀러레이터 개방도가 작아지는 방향으로 설정되어 있다. 즉, 배터리(9)의 SOC가 같은 상태에서 동일 차속이면, 엔진(1)을 시동하는 액셀러레이터 개방도 (엔진 시동선 상의 액셀러레이터 개방도)에 비해서, 엔진(1)을 정지하는 액셀러레이터 개방도(엔진 정지선 상의 액셀러레이터 개방도)가 작아지도록 설정되어 있다.
엔진(1)을 시동하는 시동 처리에서는, EV 주행 상태에서 도 3에 나타내는 엔진 시동선을 액셀러레이터 개방도가 초과한 시점에서, 제2 클러치(5)를 반 클러치 상태로 슬립시키도록 제2 클러치(5)의 토크 용량을 제어하고, 제2 클러치(5)가 슬립 개시했다고 판단한 후에 제1 클러치(4)의 체결을 개시하여 엔진 회전수를 상승시킨다. 그리고, 엔진 회전수가 최초 폭발 가능한 회전수로 달성되면 엔진(1)을 작동시켜서 MG 회전수와 엔진 회전수가 가까워진 시점에서 제1 클러치(4)를 완전하게 체결하고, 그 후 제2 클러치(5)를 로크 업시켜서 HEV 모드로 천이시킨다.
엔진 컨트롤러(21)는, 통합 컨트롤러(20)로부터의 지령에 따라, 엔진(1)을 제어하고 있다.
MG 컨트롤러(22)는, 통합 컨트롤러(20)로부터의 지령에 따라, 모터 제너레이터(2)를 구동하는 인버터(8)를 제어하고 있다. 모터 제너레이터(2)는, 배터리(9)로부터 공급된 전력이 인가된 역행 운전과, 발전기로서 기능하여 배터리(9)를 충전하는 회생 운전과, 기동 및 정지의 전환이 MG 컨트롤러(22)에 의해 제어되고 있다. 또한, 모터 제너레이터(2)의 출력(전류값)은, MG 컨트롤러(22)로 감시되고 있다.
다음에, 도 4 및 도 5를 사용하여, 상술한 하이브리드 차량에 적용되는 액셀러레이터 페달 답력 제어 장치에 대해서 설명한다.
도 4는 액셀러레이터 페달 답력 제어 장치의 시스템 구성을 답력 변경 기구의 개략과 함께 모식적으로 나타낸 설명도이며, 도 5는 답력 변경 기구의 일 실시예를 모식적으로 나타낸 설명도이다.
이 액셀러레이터 페달 답력 제어 장치는, 기본적으로는, 도시하지 않은 차량의 차체(31)에 설치된 액셀러레이터 페달(32)의 답력(조작 반력)을 가변적으로 제어하는 것이며, 액셀러레이터 페달(32)의 개방도가 소정의 액셀러레이터 개방도 임계값보다도 큰 영역에서는 액셀러레이터 페달(32)의 답력을 베이스 답력보다도 증가시키는 것이다.
액셀러레이터 페달(32)은, 도 4, 도 5에 나타낸 바와 같이, 회전축(33) 상에 설치되어 상기 회전축(33)을 지지점으로 하여 요동하도록 구성되고, 일단부가 차체(31)에 고정되는 동시에 타단부가 회전축(33)에 고정된 다양한 형태의 리턴 스프링(34)에 의해, 액셀러레이터 폐쇄 방향으로의 반력이 주어져 있다. 또한, 회전축(33)의 일단부가 차체(31)에 베어링(35)을 통해서 회전 가능하게 지지되어 있는 한편, 회전축(33)의 타단부 부근에, 액셀러레이터 개방도 검지 수단으로서 전술한 액셀러레이터 개방도 센서(17)가 설치되어 있다.
또한, 본 실시예에서는, 액셀러레이터 페달(32)의 스텝핑량(액셀러레이터 개방도)과 엔진(1)의 스로틀 밸브(도시 생략)의 개방도가 서로 연동하여, 액셀러레이터 페달(32)의 스텝핑량에 따라서 엔진(1)의 스로틀 밸브 개방도가 증대된다. 즉, 액셀러레이터 개방도에 따라서 연료 분사량(나아가서는 연료 소비량)이 증대된다.
그리고, 답력 변경 기구로서는, 회전축(33)의 회전에 마찰력을 부여하는 서로 대향한 한 쌍의 마찰 부재(37a, 37b)를 구비한 가변 마찰 플레이트(37)로 이루어지고, 한쪽의 마찰 부재(7a)는, 회전축(3)의 단부에 기계적으로 결합해서 설치되고, 다른 쪽의 마찰 부재(7b)는, 스플라인 등을 통하여, 고정 축(38)에, 축 방향 이동 가능 또한 비회전으로 지지되어 있다. 고정 축(38)은, 차체(31)에 고정 지지되어 있다. 또한, 마찰 부재(37b)를 마찰 부재(37a)를 향해서 가압하는 액추에이터(예를 들어 전자기 솔레노이드)(39)가 차체(31)에 고정되어 있다.
가변 마찰 플레이트(37)는, 액추에이터(39)의 작동에 의해 마찰 부재(37b)를 축 방향(도 4에 있어서의 화살표 A1 방향)으로 이동시키고, 이에 의해, 마찰 부재(37a)와 마찰 부재(37b) 사이의 마찰력을 가변적으로 제어한다. 이 액추에이터(39)의 작동은, 통합 컨트롤러(20)로부터의 지령에 기초하여 엔진 컨트롤러(21)에 의해 제어되고 있다. 따라서, 액추에이터(39)의 작동을, 엔진 컨트롤러(21)가 제어함으로써, 회전축(33)에 부여되는 마찰력 나아가서는 액셀러레이터 페달(32)의 스텝핑 시의 답력을 변경할 수 있다.
도 6은, 상기 실시예에 있어서의 액셀러레이터 페달 답력의 특성을 개략적으로 나타내고 있고, 기본적인 답력 즉 베이스 답력은, 개방도 증가 방향과 개방도 감소 방향에서 적당한 히스테리시스를 가지면서, 액셀러레이터 개방도에 대하여 대략 비례적으로 증가한다. 그리고, 개방도 증가 방향으로의 조작 시 즉 스텝핑 시에 소정의 액셀러레이터 개방도 임계값(도 6의 부호 SL)보다도 액셀러레이터 개방도가 커지면, 액셀러레이터 페달 답력은 베이스 답력보다도 스텝적으로 증가한다. 이렇게 액셀러레이터 페달 답력이 스텝적으로 증대됨으로써, 운전자에 의한 액셀러레이터 페달(32)의 그 이상의 스텝핑이 자연히 억제된다.
또한, 본 실시예에서는, 상기한 액셀러레이터 개방도 증가 방향에서의 액셀러레이터 페달(32)의 답력 증가는, 액셀러레이터 개방도가 상기의 소정 개방도 이하로 감소했을 때에 해제되어 있지만, 액셀러레이터 페달(32)의 조작 방향이 액셀러레이터 개방도 감소 방향으로 반전했을 때에 즉시 해제하도록 해도 된다.
그리고, 본 실시예에서는, 액셀러레이터 페달(32)의 답력을 베이스 답력보다도 증가시키는 액셀러레이터 개방도 임계값이, 도 3에 나타낸 엔진 시동선에 대응한 액셀러레이터 개방도에 기초하여 설정된 제1 액셀러레이터 개방도와, 평탄로 일정속 평형 개방도로 되는 액셀러레이터 개방도에 기초한 제2 액셀러레이터 개방도, 바꾸어 말하면 평탄 노면에서 가감속 없이 차량을 주행시키는데 필요한 소위 R/L선(로드 로드 선)상의 액셀러레이터 개방도에 기초하여 설정된 제2 액셀러레이터 개방도에 의해 설정되어 있다.
도 7은 액셀러레이터 개방도 임계값의 특성 예를 나타내는 설명도이며, 도 7의 (a)는 배터리의 SOC가 높은 경우의 특성 예를 나타내고, 도 7의 (b)는 배터리의 SOC가 낮은 경우의 특성 예를 나타내고 있다.
제1 액셀러레이터 개방도(도 7 중의 파선)는, EV 주행으로부터 HEV 주행으로 바뀌는 임계값인 엔진 시동선(도 7 중의 실선) 상의 액셀러레이터 개방도로부터 소정의 액셀러레이터 개방도량 α를 뺀 액셀러레이터 개방도이다. 이 액셀러레이터 개방도량 α는 페달 반력을 감지하여 액셀러레이터 페달(32)의 스텝핑을 멈출 때까지 스텝핑하는 개방도를 고려하여 설정한다. 제2 액셀러레이터 개방도(도 7 중의 2점 쇄선)는, 각 차속으로 평탄로에서의 일정속 가능한 액셀러레이터 개방도(R/L선 상의 액셀러레이터 개방도이며 도 7 중의 1점 쇄선)로 일정 가속 가능한 구동력을 확보 가능한 액셀러레이터 개방도량 β를 더한 액셀러레이터 개방도이다.
도 7을 사용해서 상세하게 서술하면, 엔진 시동선은, 배터리(9)의 SOC가 저하하면 액셀러레이터 개방도가 저하하는 방향(도 7에 있어서의 하방)으로 변화되기 때문에, 제1 액셀러레이터 개방도도 배터리(9)의 SOC가 저하하면 작아진다. 제1 액셀러레이터 개방도만으로 액셀러레이터 개방도 임계값을 설정하면, 배터리(9)의 SOC가 저하할수록 액셀러레이터 개방도 임계값도 상대적으로 작아지기 때문에, 운전자가 액셀러레이터 페달(32)을 스텝핑하고 싶은 장면에서 액셀러레이터 페달(32)을 스텝핑하기 어려워질 가능성이 있다. 그러나, 본 실시예에서는, 제1 액셀러레이터 개방도가 제2 액셀러레이터 개방도보다도 작아지는 경우에는, 액셀러레이터 개방도 임계값이 제2 액셀러레이터 개방도로 전환된다. 즉, 본 실시예에서는, 액셀러레이터 개방도 임계값(도 7에 있어서의 굵은 실선)이, 각 차속에 있어서, 제1 액셀러레이터 개방도와 제2 액셀러레이터 개방도 중 큰 값으로서 설정되어 있다. 바꾸어 말하면, 액셀러레이터 개방도 임계값은, 제1 액셀러레이터 개방도로서 기본적으로는 설정되지만, 제1 액셀러레이터 개방도에는 제2 액셀러레이터 개방도로 규정되는 하한값이 설정되어 있다.
이와 같이, 제1 액셀러레이터 개방도를 엔진 시동선에 기초하여 설정하고, 또한 이와 같이 설정된 제1 액셀러레이터 개방도에 대하여, 제2 액셀러레이터 개방도로 규정되는 하한값을 또한 설정함으로써, 운전자가 액셀러레이터 페달(32)을 스텝핑하고 싶은 장면에서, 액셀러레이터 페달(32)이 스텝핑되기 어려워지는 것을 방지할 수 있고, 액셀러레이터 페달(32)을 일정 이상 스텝핑하는 것이 가능해지므로, 차량의 양호한 가속성을 확보할 수 있다.
특히, 제1 액셀러레이터 개방도의 하한값인 제2 액셀러레이터 개방도가, 각 차속으로 일정속 주행 가능한 평탄로 일정속 평형 개방도로 일정 가속 가능한 구동력을 확보 가능한 액셀러레이터 개방도량 β를 더한 액셀러레이터 개방도이므로, 각 차속마다 가속에 필요한 구동력을 확실하게 확보할 수 있다.
또한, 평탄로 일정속 평형 개방도로 되는 액셀러레이터 개방도는 차속이 증가할수록 커지기 때문에, 제2 액셀러레이터 개방도도 차속이 증가할수록 커진다. 차속이 증가하면, 변속비가 낮아져, 차량 구동력이 감소하여 필요 이상의 가속은 발생하기 어려워지므로, 이렇게 제1 액셀러레이터 개방도의 하한값으로 되는 제2 액셀러레이터 개방도가 차속의 증가에 따라 커짐으로써, 차속이 빠른 경우라도 차량의 가속성을 확보할 수 있다.
또한, 배터리(9)의 SOC가 저하하면, 모터 제너레이터(2)가 발생할 수 있는 최대 토크가 저하하므로, EV 모드의 운전 영역을 작게 할 필요가 있지만, 제1 액셀러레이터 개방도는, 엔진 시동선에 기초하여 설정되어 있기 때문에, 배터리(9)의 SOC가 저하할수록 작아진다. 즉, 제1 액셀러레이터 개방도는, 배터리(9)의 SOC에 따라서 가변하기 때문에, 액셀러레이터 개방도 임계값으로서 제1 액셀러레이터 개방도가 선택되고, 제2 액셀러레이터 개방도가 선택되지 않는 운전 상태에 있어서는, EV 모드로부터 HEV 모드로 바뀌기 직전에, 액셀러레이터 페달(32)의 답력이 베이스 답력보다도 증가하고, EV 모드로부터 HEV 모드로 바뀌는 것을 운전자에 알릴 수 있다.
바꾸어 말하면, 도 7에 나타낸 바와 같이, 제1 액셀러레이터 개방도가 제2 액셀러레이터 개방도보다도 큰, 차속이 낮은 상태에서는, 액셀러레이터 개방도 임계값으로서 제1 액셀러레이터 개방도가 선택됨으로써, EV 모드로부터 HEV 모드로 전환되기 직전에, 액셀러레이터 페달(32)의 답력이 베이스 답력보다도 증가하여, EV 모드로부터 HEV 모드로 바뀌는 것을 운전자에 알릴 수 있다.
도 8은, 액셀러레이터 페달(32)의 답력을 베이스 답력보다도 증가시킬 때의 제어의 흐름을 도시하는 흐름도를 나타내고 있다.
S1에서는, 차속과 액셀러레이터 개방도와 배터리(9)의 SOC를 산출한다.
S2에서는, 배터리(9)의 SOC와 차속으로부터 엔진 시동선을 산출하고, 엔진 시동선으로부터 제1 액셀러레이터 개방도를 산출한다.
S3에서는, 미리 계산된 차속마다의 평탄로 일정속 주행 가능한 액셀러레이터 개방도로부터 제2 액셀러레이터 개방도를 산출한다.
S4에서는, 제1 액셀러레이터 개방도와 제2 액셀러레이터 개방도 중, 큰 쪽을 액셀러레이터 개방도 임계값으로 한다. S5에서는 액셀러레이터 개방도가 액셀러레이터 개방도 임계값 이상인지 여부를 판정하여, 액셀러레이터 개방도가 액셀러레이터 개방도 임계값 이상으로 되면 S6로 진행하고, 그렇지 않은 경우에는 S7로 진행한다.
S6에서는, 액셀러레이터 페달(32)의 답력을 베이스 답력보다도 증가시킨다.
S7에서는, 베이스 답력에 대하여 답력이 증가된 상태인지의 여부를 판정하고, 답력이 증가된 상태이면 S8로 진행하고, 그렇지 않은 경우에는 금회의 루틴을 종료한다.
S8에서는, 액셀러레이터 개방도가 액셀러레이터 개방도 임계값보다도 작은 소정의 해제 임계값 이하인지 여부를 판정하여, 해제 임계값 이하이면 S9로 진행하고, 그렇지 않은 경우에는 금회의 루틴을 종료한다.
S9에서는, 액셀러레이터 페달(32)이 복귀된 상태로 되어 있음에도 불구하고, 액셀러레이터 페달(32)의 답력이 베이스 답력보다도 증가한 상태로 되어 있으므로, 답력의 증가 분을 감소시킨다.
또한, 상술한 실시예에 있어서, 제1 액셀러레이터 개방도는, 엔진 시동선 상의 액셀러레이터 개방도에 대하여 소정의 액셀러레이터 개방도량 α를 뺀 값으로 되어 있지만, 엔진 시동선 상의 액셀러레이터 개방도를 그대로 제1 액셀러레이터 개방도로 설정하는 것도 가능하다. 즉, 엔진 시동선을, 제1 액셀러레이터 개방도로 설정하는 것도 가능하다.
상술한 실시예의 하이브리드 차량은, 엔진(1) 및 모터 제너레이터(2) 양쪽의 구동력이 차륜에 전달되는 구성으로 되어 있지만, 본원 발명은 이러한 하이브리드 차량에만 적용되는 것이 아니며, 예를 들어, 엔진을 발전에만 사용하는 구성의 하이브리드 차량이나, 엔진으로부터의 동력을 동력 분할 기구에 의해 발전기와 모터에 배분하는 구성의 하이브리드 차량 등, 여러가지의 하이브리드 차량에 적용가능하다.
또한, 상술한 실시예에 있어서는, 변속기로서 자동 변속기(3)가 사용되고 있지만, 자동 변속기(3) 대신에 변속비가 연속적으로 변화하는 무단 변속기를 사용하는 것도 가능하다. 무단 변속기의 경우에는, 입력축측 및 출력축측의 회전 속도의 비로서 변속비를 구하는 것이 가능하다.
또한, 상술한 실시예에 있어서는, 배터리(9)의 SOC에 따라서 엔진 시동선 및 엔진 정지선을 변화시켰지만, 배터리(9)의 온도, 배터리(9)의 열화 상태, 혹은 스포츠 주행 모드 등의 운전 모드 등에 따라서 변화시켜도 상관없다.
Claims (7)
- 내연 기관과, 차량 주행시에 구동원으로서 사용되는 전동기를 구비하는 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치이며,
상기 장치는, 액셀러레이터 페달의 답력을 변경하는 답력 변경 수단을 갖고,
상기 액셀러레이터 페달 답력 제어 장치는,
액셀러레이터 개방도가 액셀러레이터 개방도 임계값을 초과해서 커지면, 액셀러레이터 페달의 답력을 베이스 답력보다도 증가시키고,
상기 전동기만을 구동해서 차량을 주행하는 제1 주행 모드로부터 상기 내연 기관을 구동하는 제2 주행 모드로 바뀌는 액셀러레이터 개방도에 기초하여 제1 액셀러레이터 개방도를 설정하고,
각 차속으로 일정속 주행 가능한 액셀러레이터 개방도에 기초한 제2 액셀러레이터 개방도를 설정하고,
제1 액셀러레이터 개방도와 제2 액셀러레이터 개방도 중 더 큰 것을 액셀러레이터 개방도 임계값으로 설정하는, 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치. - 제1항에 있어서, 상기 제2 액셀러레이터 개방도는, 차속이 증가할수록 커지도록 설정되어 있는, 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치.
- 제1항에 있어서, 상기 제1 액셀러레이터 개방도는, 상기 전동기의 구동원이 되는 배터리의 상태(SOC)에 따라서 가변하도록 설정되어 있는, 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치.
- 제3항에 있어서, 상기 제1 액셀러레이터 개방도는, 상기 배터리의 상기 SOC가 저하할수록 작아지도록 설정되어 있는, 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 제1 액셀러레이터 개방도는, 하이브리드 차량이 상기 제1 주행 모드로부터 상기 제2 주행 모드로 바뀌는 엔진 시동선 상의 액셀러레이터 개방도로부터 미리 정해진 액셀러레이터 개방량을 뺌으로써 설정되는, 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 제2 액셀러레이터 개방도는, 차량이 각 차속으로 평탄 노면 상에서 일정한 속도로 주행할 수 있는 액셀러레이터 개방도에, 차량이 일정한 가속도로 가속될 수 있는 구동력을 보장할 수 있는 액셀러레이터 개방량을 추가함으로써 얻어진 액셀러레이터 개방도로 설정되는, 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치.
- 삭제
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2010-118920 | 2010-05-25 | ||
| JP2010118920A JP5471829B2 (ja) | 2010-05-25 | 2010-05-25 | ハイブリッド車両のアクセルペダル踏力制御装置 |
| PCT/JP2011/060305 WO2011148753A1 (ja) | 2010-05-25 | 2011-04-27 | ハイブリッド車両のアクセルペダル踏力制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20130004521A KR20130004521A (ko) | 2013-01-10 |
| KR101420959B1 true KR101420959B1 (ko) | 2014-07-17 |
Family
ID=45003745
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020127030745A KR101420959B1 (ko) | 2010-05-25 | 2011-04-27 | 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8620566B2 (ko) |
| EP (1) | EP2578432B1 (ko) |
| JP (1) | JP5471829B2 (ko) |
| KR (1) | KR101420959B1 (ko) |
| CN (1) | CN102905927B (ko) |
| BR (1) | BR112012030026A2 (ko) |
| MX (1) | MX2012013367A (ko) |
| RU (1) | RU2527652C2 (ko) |
| WO (1) | WO2011148753A1 (ko) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5381321B2 (ja) * | 2008-07-31 | 2014-01-08 | 日産自動車株式会社 | アクセルペダル踏力制御装置 |
| US20120047087A1 (en) * | 2009-03-25 | 2012-02-23 | Waldeck Technology Llc | Smart encounters |
| JP5843412B2 (ja) * | 2012-11-21 | 2016-01-13 | 本田技研工業株式会社 | アクセルペダル反力制御装置及び車両 |
| KR101406533B1 (ko) * | 2013-04-16 | 2014-06-12 | 기아자동차주식회사 | 가속페달 장치의 답력 능동 조절방법 |
| KR101406654B1 (ko) * | 2013-04-23 | 2014-06-11 | 기아자동차주식회사 | 가속페달 장치의 답력 능동 조절방법 |
| JP2015048052A (ja) * | 2013-09-04 | 2015-03-16 | トヨタ自動車株式会社 | ペダル装置の取付構造 |
| US9162674B2 (en) | 2013-10-24 | 2015-10-20 | Ford Global Technologies, Llc | Dynamic mapping of pedal position to wheel output demand in a hybrid vehicle |
| US10025341B2 (en) | 2013-10-30 | 2018-07-17 | Honda Motor Co., Ltd. | Pedal reactive force controller |
| GB2523589B (en) * | 2014-02-28 | 2020-04-22 | Bentley Motors Ltd | Hybrid drive system |
| US9296297B2 (en) | 2014-04-01 | 2016-03-29 | Atieva, Inc. | Dual stage accelerator assembly with selectable stroke transition and pedal feedback system |
| US9908409B2 (en) * | 2014-08-29 | 2018-03-06 | Mazda Motor Corporation | Vehicle accelerator pedal reaction force control device |
| FR3070945B1 (fr) * | 2017-09-08 | 2019-09-13 | Psa Automobiles Sa | Controle de fourniture d’un couple complementaire par une machine motrice non-thermique d’un vehicule hybride en fonction du potentiel d’acceleration |
| JP6521491B1 (ja) * | 2017-12-01 | 2019-05-29 | マツダ株式会社 | 車両の制御装置 |
| RU2681805C1 (ru) * | 2018-04-10 | 2019-03-12 | Сергей Николаевич Низов | Узел акселератора для двигателя внутреннего сгорания с турбонаддувом |
| JP7447720B2 (ja) | 2020-07-20 | 2024-03-12 | 日産自動車株式会社 | エンジン制御方法、及びエンジン制御装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005132225A (ja) | 2003-10-30 | 2005-05-26 | Nissan Motor Co Ltd | アクセルペダル踏力制御装置 |
| JP2006180626A (ja) | 2004-12-22 | 2006-07-06 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2007261399A (ja) | 2006-03-28 | 2007-10-11 | Toyota Motor Corp | ハイブリッド車およびその制御方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU142540A1 (ru) * | 1958-08-12 | 1960-11-30 | В.К. Зорин | Устройство, облегчающее управление автомобилем |
| SU1244653A1 (ru) * | 1983-06-06 | 1986-07-15 | Опытно-Механический Завод Главленстройматериалов | Устройство управлени исполнительным органом |
| CN1301200C (zh) * | 2002-09-13 | 2007-02-21 | 本田技研工业株式会社 | 混合车辆 |
| EP1524145A3 (en) * | 2003-10-15 | 2006-01-04 | Nissan Motor Company, Limited | Drive train for hybrid vehicle |
| JP4135107B2 (ja) * | 2004-11-04 | 2008-08-20 | アイシン・エィ・ダブリュ株式会社 | ハイブリッド車用駆動装置及びその制御方法 |
| JP5082243B2 (ja) * | 2006-01-10 | 2012-11-28 | トヨタ自動車株式会社 | 車両用運転補助装置 |
| DE102008000577A1 (de) * | 2008-03-10 | 2009-09-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeuges mit Hybridantrieb |
| JP5381321B2 (ja) * | 2008-07-31 | 2014-01-08 | 日産自動車株式会社 | アクセルペダル踏力制御装置 |
| JP4553057B2 (ja) * | 2008-07-31 | 2010-09-29 | 日産自動車株式会社 | アクセルペダル踏力制御装置および方法 |
-
2010
- 2010-05-25 JP JP2010118920A patent/JP5471829B2/ja active Active
-
2011
- 2011-04-27 KR KR1020127030745A patent/KR101420959B1/ko not_active IP Right Cessation
- 2011-04-27 BR BR112012030026A patent/BR112012030026A2/pt not_active IP Right Cessation
- 2011-04-27 WO PCT/JP2011/060305 patent/WO2011148753A1/ja active Application Filing
- 2011-04-27 CN CN201180025688.3A patent/CN102905927B/zh active Active
- 2011-04-27 RU RU2012156160/11A patent/RU2527652C2/ru not_active IP Right Cessation
- 2011-04-27 MX MX2012013367A patent/MX2012013367A/es active IP Right Grant
- 2011-04-27 US US13/699,174 patent/US8620566B2/en active Active
- 2011-04-27 EP EP11786453.8A patent/EP2578432B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005132225A (ja) | 2003-10-30 | 2005-05-26 | Nissan Motor Co Ltd | アクセルペダル踏力制御装置 |
| JP2006180626A (ja) | 2004-12-22 | 2006-07-06 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP2007261399A (ja) | 2006-03-28 | 2007-10-11 | Toyota Motor Corp | ハイブリッド車およびその制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102905927B (zh) | 2015-09-30 |
| MX2012013367A (es) | 2013-01-24 |
| RU2527652C2 (ru) | 2014-09-10 |
| CN102905927A (zh) | 2013-01-30 |
| JP2011245919A (ja) | 2011-12-08 |
| KR20130004521A (ko) | 2013-01-10 |
| BR112012030026A2 (pt) | 2016-08-02 |
| RU2012156160A (ru) | 2014-06-27 |
| EP2578432A1 (en) | 2013-04-10 |
| EP2578432A4 (en) | 2018-03-21 |
| US8620566B2 (en) | 2013-12-31 |
| WO2011148753A1 (ja) | 2011-12-01 |
| EP2578432B1 (en) | 2019-06-12 |
| US20130066508A1 (en) | 2013-03-14 |
| JP5471829B2 (ja) | 2014-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101420959B1 (ko) | 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치 | |
| US9694821B2 (en) | Drive control device for vehicle | |
| US9440653B2 (en) | Drive control device for vehicle | |
| US9540004B2 (en) | Vehicle control system | |
| US9102327B2 (en) | Engine start control device for hybrid electric vehicle | |
| EP2865913A1 (en) | Vehicle controller | |
| JP5488712B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5251495B2 (ja) | ハイブリッド車両の駆動制御装置および駆動制御方法 | |
| CN102725163A (zh) | 控制装置 | |
| JP7298179B2 (ja) | 電動車両の制御方法および電動車両の駆動システム | |
| JP5322751B2 (ja) | 車両の動力伝達制御装置 | |
| JP3671669B2 (ja) | ハイブリッド車両のクリープ走行制御装置 | |
| JP5374914B2 (ja) | ハイブリッド車両の制御装置 | |
| US20180056969A1 (en) | Control device | |
| JP5462057B2 (ja) | 車両の動力伝達制御装置 | |
| JP5287825B2 (ja) | ハイブリッド車両のアイドル制御装置 | |
| JP5803626B2 (ja) | 車両の制御装置 | |
| KR101063218B1 (ko) | 하이브리드 차량용 오일펌프 및 클러치간의 유압 제어 장치및 방법 | |
| JP2012091620A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP5333407B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5842323B2 (ja) | 電動車両の制御装置 | |
| JP5333405B2 (ja) | 車両の制御装置 | |
| JP2023169919A (ja) | 車両の制御装置 | |
| JP2018115680A (ja) | 車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| LAPS | Lapse due to unpaid annual fee |