JP3671669B2 - ハイブリッド車両のクリープ走行制御装置 - Google Patents
ハイブリッド車両のクリープ走行制御装置 Download PDFInfo
- Publication number
- JP3671669B2 JP3671669B2 JP12012998A JP12012998A JP3671669B2 JP 3671669 B2 JP3671669 B2 JP 3671669B2 JP 12012998 A JP12012998 A JP 12012998A JP 12012998 A JP12012998 A JP 12012998A JP 3671669 B2 JP3671669 B2 JP 3671669B2
- Authority
- JP
- Japan
- Prior art keywords
- creep
- engine
- torque
- motor generator
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 25
- 230000005540 biological transmission Effects 0.000 claims description 21
- 230000007246 mechanism Effects 0.000 claims description 18
- 238000006243 chemical reaction Methods 0.000 claims description 8
- 238000000034 method Methods 0.000 description 13
- 230000008878 coupling Effects 0.000 description 6
- 238000010168 coupling process Methods 0.000 description 6
- 238000005859 coupling reaction Methods 0.000 description 6
- 230000007704 transition Effects 0.000 description 6
- 239000000446 fuel Substances 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000035939 shock Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
【発明の属する技術分野】
本発明は、エンジンとモータジェネレータを駆動源とするハイブリッド車両に関し、特に、エンジン停止状態でも車両のクリープ走行を可能とするモータジェネレータの制御技術に関する。
【0002】
【従来の技術】
駆動源に燃焼機関(本明細書において、エンジンという)と電動発電機(同じく、モータジェネレータという)とを併せ備えるハイブリッド車両においては、低アクセル開度時からアクセルペダルが解放(同じく、ペダルの解放をオフ、踏込みをオンという)の車両停止時にかけてエンジンを停止させることで、燃費を向上させる制御が行なわれる。こうしたハイブリッド車両駆動装置の一形式として、エンジンとモータジェネレータとの間にトルクスプリット機構を介挿したパワートレインがある。このパワートレインでは、アクセル・オフ、ブレーキ・オン状態ではエンジンを停止させ、発進時は、エンジンを始動させてモータジェネレータとエンジンとでスプリット発進を行うようにしている。
【0003】
ところで、一般的なトルクコンバータ付自動変速機を搭載した車両では、ブレーキ・オフ、アクセル・オフの状態でも、ドライブレンジ又はリバースレンジにおいて、トルクコンバータを介するエンジントルクの車輪への伝達によりクリープが発生する。こうしたクリープは、車両を微妙に移動させるためには、有効なものである。
【0004】
【発明が解決しようとする課題】
そこで、上記のような形式のハイブリッドパワートレインで車両をクリープさせようとする場合、その方法として、エンジンとモータジェネレータに共にトルク出力させるスプリット状態にするか、又はモータジェネレータ単独でトルクを出力させる必要がある。しかしながら、前者のスプリット状態でクリープトルクを発生させる方法では、クリープで車両を僅かに移動させるためだけに、上記のように停車時に停止させているエンジンを始動させなければならなくなり、特に、ブレーキのオン・オフ操作が頻繁に行われた場合には、その度にエンジン始動を繰り返すことになり、しかも、そうすることでエンジンを作動効率の悪い領域で使用することになるので、燃費改善上問題がある。
【0005】
こうした問題点を回避するのに、後者のモータジェネレータ単独でクリープトルクを発生させる方法を採ると、スプリット機構の入力クラッチを解放してエンジンを切離し、スプリット機構の直結状態を得る直結クラッチを係合させた状態でクリープを生じさせることになるが、この場合には、運転者の発進意図でアクセル開度が大きくなり、エンジンを始動する必要が生じたときに、発進のためのスプリット状態とするのに、解放状態の入力クラッチを係合させながら、係合状態の直結クラッチを解放するいわゆる摩擦係合装置のつかみ替え制御を必要とすることになり、制御が煩雑となるばかりでなく、発進状態への移行のレスポンスの低下が懸念される。
【0006】
そこで、本発明は、エンジン停止時に、エンジン始動への移行が容易な状態で車両のクリープを生じさせるハイブリッド車両のクリープ走行制御装置を提供することを第1の目的とする。
【0007】
次に、本発明は、上記クリープをモータジェネレータの制御で停止状態のエンジンのクランキングトルクを利用して生じさせることを第2の目的とする。
【0008】
次に、本発明は、上記クリープによる車両の過度の加速を防ぐことを第3の目的とする。
【0009】
更に、本発明は、上記クリープ発生状態への移行をショックを生じさせることなく円滑に行うことを第4の目的とする。
【0010】
また、本発明は、自動変速機を備えるハイブリッド車両において、シフトポジションに応じたクリープを生じさせることで、運転操作に沿ったクリープ力を得られるようにすることを第5の目的とする。
【0011】
更に、本発明は、上記クリープの発生状態からのエンジン始動をレスポンスよく行えるようにすることを第6の目的とする。
【0012】
また、本発明は、上記クリープの発生のための制御を、通常のエンジン車の場合のトルク制御と同様の制御方法で可能とすることを第7の目的とする。
【0013】
【課題を解決するための手段】
上記第1の目的を達成するため、本発明のハイブリッド車両のクリープ走行制御装置は、エンジンと、モータジェネレータと、モータジェネレータと車輪に連結されるとともにエンジンに入力クラッチを介して連結されたスプリット機構とを備えるハイブリッド車両であって、前記エンジン、モータジェネレータ及び入力クラッチを制御する制御装置と、ブレーキ操作を検出するブレーキ踏込み検出手段と、アクセル操作を検出するアクセル開度検出手段と、車速を検出する車速検出手段とを備えるものにおいて、前記制御装置は、アクセル操作、ブレーキ操作及び車速からクリープ走行を判断するクリープ制御判断手段を有し、該クリープ制御判断手段によりエンジン停止状態でのクリープ走行を判断したとき、入力クラッチを係合させて、モータジェネレータに一定のトルクを出力させ、エンジンのクランキングトルク及びイナーシャトルクを反力として、クリープトルクを発生させることを特徴とする。
【0014】
次に、第2の目的を達成するため、前記一定のトルクは、エンジンのクランキングトルクより小さく設定される。
【0015】
更に、第3の目的を達成するため、前記モータジェネレータに出力させるトルクを、車速検出手段により検出される車速の増加に応じてドルーピング制御する構成とされる。
【0016】
更に、第4の目的を達成するため、前記モータジェネレータの出力トルクを、前記一定のトルクまで徐々に上昇させる立ち上げ制御を行う構成とされる。
【0017】
次に、第5の目的を達成するため、前記スプリット機構の出力を変速して車輪に伝達すべく、前進走行レンジと後進走行レンジを有する自動変速機と、該自動変速機の選択されたレンジを検出するシフトポジション検出手段とを備え、前記モータジェネレータの出力トルクを、シフトポジション検出手段により検出されるレンジに応じて前進走行レンジより後進走行レンジの方が大きくなる設定とされる。
【0018】
次に、第6の目的を達成するため、前記制御装置は、アクセル操作、ブレーキ操作及び車速からクリープ走行を判断するクリープ制御判断手段を有し、該クリープ制御判断手段によりエンジン停止状態でのクリープ走行を判断したとき、入力クラッチを係合させて、モータジェネレータに一定のトルクを出力させ、エンジンのクランキングトルク及びイナーシャトルクを反力として、クリープトルクを発生させるクリープ制御手段と、アクセル操作からエンジン始動を判断するエンジン始動判断手段とを有し、前記クリープ制御手段によるクリープ制御中にエンジン始動を判断したときに、モータジェネレータのトルク出力を制御して入力クラッチを介するエンジン駆動により、エンジン回転数をエンジン始動回転数にすることでエンジンを始動させる構成とされる。
【0019】
更に、第7の目的を達成するため、前記モータジェネレータの出力トルクを、トルク指令マップに基づき制御する構成とされる。
【0020】
【発明の作用及び効果】
上記の構成を採る請求項1記載の構成では、モータジェネレータを一定のトルクで駆動し、エンジンのクランキングトルクと、該トルクのエンジンクランク角位置に応じた変動に対して相補的に作用するイナーシャトルクとを反力とするスプリット機構からの一定の出力により、安定したクリープ走行が可能となる。しかも、このクリープ走行状態は、入力クラッチを係合した状態で得られるので、クリープ走行後に通常予想される車両発進のためのエンジン始動制御への移行の際に必要となる入力クラッチの係合状態が得られているので、入力クラッチを解放し、直結クラッチの係合によりモータジェネレータ単独のトルク出力でクリープ走行を可能とする場合のような入力クラッチと直結クラッチのつかみ替えのための煩雑な制御を不要とし、エンジン始動制御への移行を容易にすることができる。
【0021】
次に、請求項2記載の構成では、モータジェネレータの出力トルクによりエンジンがクリープ制御の開始当初に空転してしまうことがなく、エンジンのクランキングトルクとイナーシャトルクを反力とするクリープを制御開始当初から確実に発生させることができる。
【0022】
更に、請求項3に記載の構成では、モータジェネレータの電源としてのバッテリの消耗を防止し、しかも過度のクリープを防止することができる。
【0023】
更に、請求項4に記載の構成では、エンジンのクランク角位置によって異なるクランキングトルクの影響がクリープ力に現れないようにすることがき、しかも、急激なクリープ開始ショックを防止することができる。
【0024】
更に、請求項5に記載の構成では、前進走行時の操作に比べて操作が難しいリバース走行による車庫入れ等の際に、大きめなクリープ力による走行状態が得られるため、アクセル操作なしのブレーキ操作のみで容易に車速をコントロールすることができる。
【0025】
更に、請求項6に記載の構成では、モータジェネレータのトルク制御のみで、スプリット機構のクラッチ操作を要せずにエンジンの始動が可能となる。
【0026】
次に、請求項7に記載の構成では、通常のエンジン車のようなアクセル開度に対応したトルク制御と同様のトルク制御が可能となる。
【0027】
【発明の実施の形態】
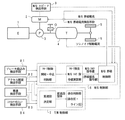
以下、図面に沿い、本発明の実施形態について説明する。図1は実施形態に係るハイブリッド車両のクリープ走行制御装置のシステム構成をブロック図で示す。このハイブリッド車両は、そのパワートレインに、エンジン(E)1と、モータジェネレータ(M)2と、エンジン1とモータジェネレータ2とに連結されたスプリット機構(P)3とを備えており、スプリット機構3は、自動変速機からなるトランスミッション(T)4を経て車輪5に連結されている。なお、このパワートレインでは、エンジン始動のために、スプリット機構3の出力側がエンジン回転と逆方向に回転するのを阻止するワンウェイクラッチ(O)が設けられ、トランスミッション4は、円滑なクリープ走行を可能とすべく、第1速がエンジンブレーキの効かない変速段となる自動変速機とされている。
【0028】
パワートレインを制御する制御装置は、図示しないエンジン制御装置と連携してモータジェネレータ2をM/G(モータジェネレータ)界磁電流で制御するM/G制御部6と、トランスミッション4を、それに付随する図示しない油圧制御装置に印加するソレノイド駆動電流で制御するT/M(トランスミッション)制御部7とで構成され、制御のための情報検出手段として、ブレーキ操作を検出するブレーキ踏込み検出手段81と、アクセル操作を検出するアクセル開度検出手段82と、車速を検出する車速検出手段83と、トランスミッション4のレンジ位置を検出するシフトレバーポジション検出手段84とを備えるほか、モータジェネレータ2に付随するレゾルバ等からなるM/Gスピード検出手段9と、M/G界磁電流のフィードバック制御のためのM/G界磁電流検出手段を備えている。
【0029】
M/G制御部6は、上記各検出手段81〜84からの情報を基に、クリープ制御の要否を判断するクリープ制御開始・中止判断部と、該判断部の判断に基づきクリープ発生のためのモータジェネレータトルクを演算するクリープ発生M/Gトルク指令値演算部と、演算されたM/Gトルク指令値(具体的には界磁電流指令値)によりモータジェネレータ2のステータへの界磁電流を制御するM/G界磁制御部を備えている。
【0030】
T/M制御部7は、上記各センサ82〜84からの情報を基に、自動変速機の変速段を決定する変速段決定部と、それからの変速指令に基づき各摩擦係合要素すなわちクラッチ及びブレーキの係合圧すなわち各時点のライン圧を判断する係合判断部を備えている。なお、図には示されていないが、スプリット機構3に付随する2つのクラッチも、この係合判断部からのソレノイド駆動電流出力により自動変速機の油圧制御装置を介して制御される。
【0031】
図2は、スプリット機構3の具体的構成をスケルトンで示す。この機構は、モータジェネレータ2の出力トルクを制御することで、エンジン1からトランスミッション4への伝達トルクを電気的に制御可能で、通常の自動変速機におけるトルクコンバータと同様のトルク増幅機能を果たすところからETC(エレクトリカルトルクコンバータ)とも呼ばれるのである。スプリット機構3は、プラネタリギヤを主体とし、その一方の入力要素としてのリングギヤRが入力クラッチCiを介してエンジン1に、他方の入力要素であるサンギヤSがモータジェネレータ2のロータに、出力要素としてのキャリアCは、トランスミッション4にそれぞれ連結されている。そして、このプラネタリギヤのサンギヤSとキャリアCは、直結クラッチCdを介して連結されている。
【0032】
図4は、上記のパワートレインを制御する制御装置に予め記憶させた走行領域マップを示す。このマップは、車速とアクセル開度との関係で定められており、低アクセル開度側の全車速域にモータ走行領域、高アクセル開度側の中・高車速域及び中・高アクセル開度域の低車速側にエンジン及びモータ走行領域、中アクセル開度域の中・高車速側にエンジン走行領域が設けられ、更に、本発明の主題に係るクリープ走行領域がアクセル開度0の低車速域に設定されている。このマップに基づく制御装置による制御で、モータ走行領域では、図2に示すダイレクトクラッチCdのみが係合され、プラネタリギヤのサンギヤS、キャリアC及びリングギヤRの一体回転で、キャリアCにモータトルクがそのまま出力される。このとき、入力クラッチCiは解放され、エンジン1は停止又はフューエルカット状態におかれる。これに対して、エンジン走行領域では、入力クラッチCiとダイレクトクラッチCdが共に係合され、一体回転するプラネタリギヤにエンジントルクが入力されるようになる。このとき、モータジェネレータ2は空転又は発電状態とされる。次に、エンジン及びモータ走行領域では、2つの走行モードが得られる。この場合、入力クラッチCiとダイレクトクラッチCdがともに係合された状態で、モータジェネレータ2をトルク出力状態にすると、モータジェネレータ2とエンジン1のトルクを共に駆動力とするパラレル走行モードとなる。一方、入力クラッチCiのみを係合させてモータジェネレータ2とエンジン1に共にトルク出力させた状態とすると、エンジントルクによるリングギヤRの回転に対して、サンギヤSがモータトルクにより回転するようになるため、モータジェネレータ2のトルク出力に応じたキャリアCの変速回転が出力されるスプリット走行モードとなる。
【0033】
ところで、このパワートレインでは、エンジン1のフューエルカット状態で、入力クラッチCiのみを係合させて、モータジェネレータ2に正転トルクを出力させると、エンジン1に連結されたリングギヤRにクランキングトルクが反力として作用するため、ピニオンギヤの公転がキャリアCの出力となり、クリープトルクを得ることができる。この状態で、車両の走行負荷によりエンジン1も徐々に微小回転し、クランク角位置が圧縮行程から膨張行程に替わるところで回転速度が急激に増加する空転が生じ、クランキングトルクがなくなるが、その際の加速度に応じたイナーシャトルクが生じるため、リングギヤRの反力は、このイナーシャトルクを利用して得ることができるようになる。
【0034】
また、このパワートレインでは、キャリアCの逆回転は、ワンウェイクラッチOの係合により常時阻止されるため、モータジェネレータ2に逆転トルクを出力させてサンギヤSを逆転駆動することにより、キャリアC固定でリングギヤRを正転方向に回転駆動することができ、その駆動力を入力クラッチCiの係合によりエンジン1に伝えることで、エンジン1を始動させることができる。したがって、クリープ状態からエンジン始動状態への移行は、モータジェネレータ2の出力トルクの方向を逆転させるだけで足りる。
【0035】
こうした構成からなるハイブリッド車両において、モータジェネレータ2の出力トルクが、その回転速度の変化に関わらず常に一定値となるようにモータジェネレータ2の界磁制御を行うことで、上記のスプリット機構3を利用したクリープ走行が可能となる。この場合のモータジェネレータ2のトルク制御方法としては、第1に、界磁電流の実効値、実効値の移動平均値などモータジェネレータ2の実効出力トルクを代表する値が一定値となるようにフィードバック制御でモータジェネレータをトルク指令値で制御する方法があり、第2に、モータジェネレータの回転速度、バッテリ状態(充電量(SOC)、温度等)によりモータジェネレータトルク指令値を実出力トルクが一定なるように補正して制御する方法がある。
【0036】
次に、上記第1の方法による制御を実行する具体的な手順をフローで説明する。図3は、この場合のクリープ制御のフローを示す。まず、ステップS1で、図1に示す車速検出手段83を用いて車速の読込みを行い、ステップS2で、その車速が所定値(Va)以下か否かを判断する。この判断が成立の場合、ステップS3によるアクセル開度検出手段82からの情報によるアクセル・オフ判断と、ステップS4によるブレーキ踏込み検出手段81からの情報によるブレーキ・オフ判断を行う。これら3段階の判断が図1に示すクリープ制御開始・中止判断部で行われる本発明にいうクリープ制御判断手段を構成する。
【0037】
そして、これらの判断が成立の場合に、ステップS5により、シフトポジション検出手段84からの情報によるシフトレバーポジションの判別を行い、次にステップS6により走行ポジション、すなわちドライブレンジ又はリバースレンジと判断されたときに、目標クリープ力演算による目標モータジェネレータトルク指令値を算出するステップS7のサブルーチンを実行する。この処理は、図1に示すクリープ発生M/Gトルク指令演算部で行われる。こうして得られたトルク指令値に基づき、ステップS8で、モータジェネレータトルク指令値マップデータから界磁電流の読込を行う。ここで、マップを用いるのは、通常のエンジン車のように、アクセル開度に対するトルクと同様に扱えるようにするためである。そして、得られた界磁電流値を実効値の移動平均値の演算などにより平均化する処理演算をステップS9で行い、最後にステップS10で界磁電流補正フィードバック処理を行う。この処理は、通常、モータジェネレータトルク指令値マップで構成しているので、界磁電流が一定になるようにフィードバック制御でトルク指令値を補正する処理であり、図1に示すM/G界磁電流検出手段からのフィードバック値を得ながらM/G界磁制御部で行われる。
【0038】
なお、上記のフローでは、油圧制御に係るソレノイど電流制御については省略されているが、入力クラッチCiの係合制御と、直結クラッチCdの解放制御は、ステップS4の判断の成立により開始すればよく、その具体的な方法は、従来の各走行モードの切り替えの際の方法と同様であるので、説明を省略する。
【0039】
上記のクリープ制御において、クリープ力(強さ)は、図5にクリープトルク指令値を車速との関係で示すように、所定の車速を超えるところから車速に対応してクリープトルク指令値を漸減させるドルーピング制御を行う。このようにすると、車速の上昇によりモータジェネレータ2の消費電流が増大し、バッテリが消耗するのを抑えることができる。また、このようなドルーピング制御は、過度なクリープによる危険を回避するにも有効である。
【0040】
また、クリープ力(強さ)を、同じく図5に示すように、シフトレバーポジションによりR(リバース)レンジのときの方がD(ドライブ)レンジのときより大きくなるように設定する。このようにすると、車庫入れ等のリバース走行時は、視線を後方に保持し、ブレーキとアクセルを操作する煩雑な操作を避けて、前進時より大きめなクリープを利用し、ブレーキ操作だけで車速をコントロールすることができるようになり、車両を操り易くなる。更に、クリープ力を上記のように設定した関係から、ドルーピングの勾配は、Rレンジの方を急にして過度の加速を防ぐようにしている。
【0041】
更に、アクセル・オフ状態でのブレーキ・オフに伴うクリープ力の立ち上げは、図6に時刻とクリープトルク指令値との関係を示すように、スイープアップ特性として、立ち上げレスポンスを鈍らせる。このようにすると、クランク角位置によってばらつく急激なクリープ開始ショックを防止することができる。
【0042】
次に、上記のようなクリープ制御中にアクセル・オンを検出し、エンジン駆動を判断したとき(図4にこのときの領域変化を白抜き矢印で示す)は、先に述べたように、モータジェネレータ2を逆転駆動し、エンジン1を正転させ、燃料供給及び点火を行ってエンジン1を始動することになる。このエンジン始動制御のための具体的制御手段については、図1に示されていないが、アクセル・オンはアクセル開度検出手段82の情報により検出することができ、それによりM/G制御部6のエンジン始動判断手段によりエンジン始動を判断することができる。この判断に基づくモータジェネレータ2のトルク出力制御は、クリープ制御の場合と同様に行うことができ、同様にM/G界磁電流によりモータジェネレータ2を制御して、すでに係合している入力クラッチCiを介するエンジン駆動により、図1に示すM/Gスピード検出手段9によりエンジン回転数を検出しながらエンジン始動回転数にするエンジン始動制御を実行することになる。
【0043】
以上要するに、上記実施形態によれば、モータジェネレータ2を一定のトルクで駆動し、エンジン1のクランキングトルクと、該トルクのエンジンクランク角位置に応じた変動に対して相補的に作用するイナーシャトルクとを反力とするスプリット機構3からの一定の出力により、安定したクリープ走行が可能となる。しかも、このクリープ走行状態は、入力クラッチCiを係合した状態で得られるので、クリープ走行後に通常予想される車両発進のためのエンジン始動制御への移行の際に必要となる入力クラッチCiの係合状態が得られているので、入力クラッチCiを解放し、直結クラッチCdの係合によりモータジェネレータ単独のトルク出力でクリープ走行を可能とする場合のような入力クラッチCiと直結クラッチCdのつかみ替えのための煩雑な制御を不要とし、エンジン始動制御への移行を容易にすることができる。
【0044】
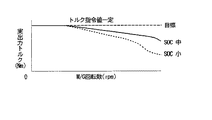
最後に、図7は、クリープトルク指令値を一定とした場合のバッテイリ充電状態が実出力トルクに与える影響を回転数との関係で示すグラフである。このようにトルク指令値を一定にしても、実出力トルクはバッテリの充電量(SOC)により回転数の増加に連れて低下する特性を示す。図に実線でSOCが中の状態、点線でSOCが小の状態を示すように、回転数が大きくなるほど目標トルク指令値からの実出力トルクの開離は大きくなる。そこで、こうした特性に合わせる意味で、先に述べた第2の方法による制御を行うのも有効である。この場合は、モータジェネレータ2の回転速度、バッテリ状態(SOC、温度等)によりモータジェネレータトルク指令値を補正する制御を行うことになる。この場合、バッテリ状態を検出するSOC検出手段、温度検出手段等を設け、トルク補正値は、予めM/G制御部に記憶させたマップデータからの読込みとするのが現実的な手段である。
【0045】
以上、本発明を実施形態を挙げて詳説したが、本発明は上記実施形態の開示内容のみに限定されることなく、特許請求の範囲に記載の事項の範囲内で種々に細部の具体的構成を変更して実施可能なものであることはいうまでもない。例えば、ブレーキ・オン時(クリープ制御中止判断時)のバッテリ充電量(SOC)が所定値以下のときは、例外的にブレーキ・オフでエンジン始動し、エンジンとモータジェネレータとのトルク出力で前記スプリット駆動状態のクリープを行うようにすることができる。
【図面の簡単な説明】
【図1】本発明の実施形態に係るハイブリッド車両のパワートレインとクリープ走行制御装置の制御系ブロック図である。
【図2】上記ハイブリッド車両のパワートレインのスプリット機構を示すスケルトン図である。
【図3】上記制御装置によるクリープ制御のフローチャートである。
【図4】上記ハイブリッド車両の走行領域マップである。
【図5】上記制御装置により出力されるクリープトルク指令値を車速との関係で示すグラフである。
【図6】上記制御装置により出力されるクリープトルク指令値のスイープアップ特性を示すグラフである。
【図7】上記制御装置により出力されるクリープトルク指令値を一定とした場合のバッテイリ充電状態が実出力トルクに与える影響を回転数との関係で示すグラフである。
【符号の説明】
1 エンジン
2 モータジェネレータ
3 スプリット機構
4 自動変速機
5 車輪
Ci 入力クラッチ
Cd 直結クラッチ
81 ブレーキ踏込み検出手段
82 アクセル開度検出手段
83 車速検出手段
84 シフトポジション検出手段
Claims (7)
- エンジンと、モータジェネレータと、モータジェネレータと車輪に連結されるとともにエンジンに入力クラッチを介して連結されたスプリット機構とを備えるハイブリッド車両であって、
前記エンジン、モータジェネレータ及び入力クラッチを制御する制御装置と、ブレーキ操作を検出するブレーキ踏込み検出手段と、アクセル操作を検出するアクセル開度検出手段と、車速を検出する車速検出手段とを備えるものにおいて、
前記制御装置は、アクセル操作、ブレーキ操作及び車速からクリープ走行を判断するクリープ制御判断手段を有し、該クリープ制御判断手段によりエンジン停止状態でのクリープ走行を判断したとき、入力クラッチを係合させて、モータジェネレータに一定のトルクを出力させ、エンジンのクランキングトルク及びイナーシャトルクを反力として、クリープトルクを発生させることを特徴とする、ハイブリッド車両のクリープ走行制御装置。 - 前記一定のトルクは、エンジンのクランキングトルクより小さく設定される、請求項1記載のハイブリッド車両のクリープ走行制御装置。
- 前記モータジェネレータに出力させるトルクを、車速検出手段により検出される車速の増加に応じてドルーピング制御する、請求項1又は2記載のハイブリッド車両のクリープ走行制御装置。
- 前記モータジェネレータの出力トルクを、前記一定のトルクまで徐々に上昇させる立ち上げ制御を行う、請求項1、2又は3記載のハイブリッド車両のクリープ走行制御装置。
- 前記スプリット機構の出力を変速して車輪に伝達すべく、前進走行レンジと後進走行レンジを有する自動変速機と、
該自動変速機の選択されたレンジを検出するシフトポジション検出手段とを備え、
前記モータジェネレータの出力トルクを、シフトポジション検出手段により検出されるレンジに応じて前進走行レンジより後進走行レンジの方が大きくなる設定とする、請求項1〜4のいずれか1項記載のハイブリッド車両のクリープ走行制御装置。 - エンジンと、モータジェネレータと、モータジェネレータと車輪に連結されるとともにエンジンに入力クラッチを介して連結されたスプリット機構とを備えるハイブリッド車両であって、
前記エンジン、モータジェネレータ及び入力クラッチを制御する制御装置と、ブレーキ操作を検出するブレーキ踏込み検出手段と、アクセル操作を検出するアクセル開度検出手段と、車速を検出する車速検出手段とを備えるものにおいて、
前記制御装置は、アクセル操作、ブレーキ操作及び車速からクリープ走行を判断するクリープ制御判断手段を有し、該クリープ制御判断手段によりエンジン停止状態でのクリープ走行を判断したとき、入力クラッチを係合させて、モータジェネレータに一定のトルクを出力させ、エンジンのクランキングトルク及びイナーシャトルクを反力として、クリープトルクを発生させるクリープ制御手段と、
アクセル操作からエンジン始動を判断するエンジン始動判断手段とを有し、
前記クリープ制御手段によるクリープ制御中にエンジン始動を判断したときに、モータジェネレータのトルク出力を制御して入力クラッチを介するエンジン駆動により、エンジン回転数をエンジン始動回転数にすることでエンジンを始動させる、ハイブリッド車両のエンジン始動制御装置。 - 前記モータジェネレータの出力トルクを、トルク指令マップに基づき制御する、請求項1〜5のいずれか1項記載のハイブリッド車両のクリープ走行制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12012998A JP3671669B2 (ja) | 1998-04-13 | 1998-04-13 | ハイブリッド車両のクリープ走行制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12012998A JP3671669B2 (ja) | 1998-04-13 | 1998-04-13 | ハイブリッド車両のクリープ走行制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11299006A JPH11299006A (ja) | 1999-10-29 |
| JP3671669B2 true JP3671669B2 (ja) | 2005-07-13 |
Family
ID=14778699
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP12012998A Expired - Fee Related JP3671669B2 (ja) | 1998-04-13 | 1998-04-13 | ハイブリッド車両のクリープ走行制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3671669B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3574997B2 (ja) * | 1999-06-11 | 2004-10-06 | 本田技研工業株式会社 | ブレーキ力制御装置 |
| US6830118B2 (en) * | 2000-02-22 | 2004-12-14 | Robert Bosch Gmbh | Drivetrain for a motor vehicle |
| US7035727B2 (en) | 2002-05-29 | 2006-04-25 | Visteon Global Technologies, Inc. | Apparatus and method of controlling vehicle creep control under braking |
| JP4487245B2 (ja) * | 2004-05-10 | 2010-06-23 | 三菱自動車工業株式会社 | モータ駆動車両 |
| JP4297918B2 (ja) * | 2006-03-23 | 2009-07-15 | トヨタ自動車株式会社 | 動力伝達装置およびその組立方法 |
| JP4059276B2 (ja) | 2006-03-24 | 2008-03-12 | トヨタ自動車株式会社 | 動力伝達装置およびその組立方法 |
| JP4924123B2 (ja) * | 2007-03-16 | 2012-04-25 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| KR101491171B1 (ko) * | 2009-07-30 | 2015-02-09 | 현대자동차주식회사 | 전기자동차의 모터 위치 및 크립 제어 장치와 그 제어 방법 |
| JP5455808B2 (ja) * | 2010-06-21 | 2014-03-26 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP5776770B2 (ja) * | 2011-06-14 | 2015-09-09 | トヨタ自動車株式会社 | 車両の制御装置および制御方法 |
| KR20130042967A (ko) * | 2011-10-19 | 2013-04-29 | 현대자동차주식회사 | 하이브리드 차량의 크리프 제어장치 및 방법 |
| JP6187528B2 (ja) * | 2015-04-10 | 2017-08-30 | トヨタ自動車株式会社 | 車両 |
| CN112061129B (zh) * | 2020-08-31 | 2022-03-15 | 长城汽车股份有限公司 | 一种控制方法、装置及车辆 |
| CN115723758B (zh) * | 2022-11-25 | 2025-10-21 | 西安法士特汽车传动有限公司 | 一种混合动力at变速器的蠕行起步控制方法及系统 |
-
1998
- 1998-04-13 JP JP12012998A patent/JP3671669B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11299006A (ja) | 1999-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7351182B2 (en) | Drive apparatus for hybrid vehicle and control method thereof | |
| US7498757B2 (en) | Control device for a hybrid electric vehicle | |
| US8825253B2 (en) | Hybrid vehicle control device | |
| KR101420959B1 (ko) | 하이브리드 차량의 액셀러레이터 페달 답력 제어 장치 | |
| US9233681B2 (en) | Control device for vehicle | |
| US7789177B2 (en) | Control apparatus and control method for drive apparatus of hybrid vehicle | |
| EP1452376A2 (en) | Hybrid-powered vehicle | |
| US8798836B2 (en) | Control device for hybrid vehicle | |
| JP3671669B2 (ja) | ハイブリッド車両のクリープ走行制御装置 | |
| JPH1169509A (ja) | ハイブリッド車両の変速制御装置 | |
| WO2013088577A1 (ja) | 車両の制御装置 | |
| US8095258B2 (en) | Vehicle powertrain, controller thereof, and method for controlling vehicle powertrain | |
| US11613248B2 (en) | Control apparatus for hybrid vehicle | |
| JP5287825B2 (ja) | ハイブリッド車両のアイドル制御装置 | |
| JP2020121696A (ja) | ハイブリッド車両の制御装置 | |
| US20200172084A1 (en) | Hybrid vehicle control system | |
| JP3925723B2 (ja) | パラレルハイブリッド車両 | |
| JPH1194070A (ja) | ハイブリッド車両の制御装置 | |
| JP5141535B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4227830B2 (ja) | 内燃機関の停止及び始動制御システム | |
| JP2012091620A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP3763223B2 (ja) | ハイブリッド車の制御装置 | |
| JP2006074997A (ja) | 車両の回生制動装置 | |
| JP7448085B2 (ja) | 車両用駆動装置 | |
| JP4182607B2 (ja) | 蓄エネ用フライホイールを有する車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041209 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20041210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050411 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080428 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090428 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |