JP7608826B2 - 動画生成装置、動画生成方法、プログラム、記憶媒体 - Google Patents
動画生成装置、動画生成方法、プログラム、記憶媒体 Download PDFInfo
- Publication number
- JP7608826B2 JP7608826B2 JP2020217197A JP2020217197A JP7608826B2 JP 7608826 B2 JP7608826 B2 JP 7608826B2 JP 2020217197 A JP2020217197 A JP 2020217197A JP 2020217197 A JP2020217197 A JP 2020217197A JP 7608826 B2 JP7608826 B2 JP 7608826B2
- Authority
- JP
- Japan
- Prior art keywords
- camerawork
- type
- panoramic images
- camera work
- video
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/22—Image preprocessing by selection of a specific region containing or referencing a pattern; Locating or processing of specific regions to guide the detection or recognition
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—Three-dimensional [3D] image rendering
- G06T15/10—Geometric effects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4038—Image mosaicing, e.g. composing plane images from plane sub-images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4046—Scaling of whole images or parts thereof, e.g. expanding or contracting using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/20—Scenes; Scene-specific elements in augmented reality scenes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/69—Control of means for changing angle of the field of view, e.g. optical zoom objectives or electronic zooming
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/695—Control of camera direction for changing a field of view, e.g. pan, tilt or based on tracking of objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/698—Control of cameras or camera modules for achieving an enlarged field of view, e.g. panoramic image capture
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Geometry (AREA)
- Computer Graphics (AREA)
- Studio Devices (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Image Analysis (AREA)
Description
始めに本実施形態で使用される用語について説明する。
従来の技術は、複数のパノラマ画像に対して通常動画を生成するために、パノラマ動画を複数のパノラマ静止画の集合と捉えて、パノラマ動画に対する動画を生成する手法である。
第一の実施形態として、動画生成装置が、複数の固定のカメラワークを各パノラマ画像に適応的に割り当てて1つの動画を生成する例を説明する。まず、動画生成装置の処理を説明するに際し、前提条件を説明する。
図2は、動画生成装置100のハードウェア構成図の一例を示す。図2に示すように、動画生成装置100は、CPU11、ROM12、RAM13、入力部14、表示部15、及び、接続I/F16を有する。
次に、図3を用いて本実施形態における動画生成装置100が有する機能について説明する。図3は、動画生成装置100が有する機能をブロック状に示す機能ブロック図の一例である。動画生成装置100は、画像取得部101、重要度算出部102、適合度算出部103、タイプ割り当て部104、及び、動画符号化部105を有する。動画生成装置100が有するこれらの各機能は、図2に示したROM12からRAM13に展開されたプログラムをCPU11が実行することにより実現されている機能又は手段である。なお、このプログラムは、プログラム配信用のサーバから配信されてもよいし、USBメモリや光記憶媒体などのコンピュータ読み取りが可能な記憶媒体に記憶された状態で配布されてもよい。
処理ステップS101では、画像取得部101が記憶装置20から複数の処理対象のパノラマ画像を取得する。
処理ステップS102では、取得したパノラマ画像中の各領域の重要度を重要度算出部102が算出する。重要度算出部102は好ましくは各画素について重要度を算出するが、サブピクセル精度で算出してもよいし、特定の領域ごとに算出してもよい。
1.重要度分布は複数の確率分布の組み合わせで構成される。
2.重要度分布を構成する個々の確率分布を要素分布と表現する。
処理ステップS103では、適合度算出部103がパノラマ画像の重要度分布Iから事前に用意されたカメラワークタイプの適合度を算出する。
(a) 投影中心を画像球中心に一致させた上で光軸方向を水平方向にパノラマ画像の端から端まで移動させるもの(全周画像の場合は一回転)、
(b) 光軸方向を重力方向に固定してステレオ投影法で光軸回転するもの、
(c) 光軸方向を重力と逆方向に固定してステレオ投影法で光軸回転するもの、
などがある。

各係数は以下のとおりである。
αK∈[0,1]はk番目の要素分布の混合率(ΣK K=1αK=1)
μK∈S2はk番目の要素分布の平均方向
κK∈R(≧0)はk番目の要素分布の集中度(κはカッパ)
<・,・>は内積(R3の標準内積)
C(κk)∈Rは式(2)を満たす正規化定数
図6は、混合von Mises-Fisher分布の一例を可視化した図を示す。図6では、極座標に対して濃淡で確率密度を表現した。

式(3)の対数尤度の最大化はEMアルゴリズム(Expectation Maximization Algorithm)により効率的な計算が可能である。適合度算出部103は、このようにして求めた{αk, μk, κk}K k=1から各カメラワークタイプの適合度を算出する。たとえば、水平移動のカメラワークタイプ(a)の適合度としては、平均方向μk,と重力方向g∈S2の内積の平均を1から引いたもの(水平方向に重要度の分布が広がっているほど値が大きくなる)が適合度である。重力方向ステレオ投影回転(b)では、平均方向μk,と重力方向g∈S2の内積の平均(要素分布が重力方向に広がっているほど値が大きくなる)が適合度である。重力逆方向ステレオ投影回転(c)では、平均方向μk,と重力逆方向-g∈S2の内積の平均(要素分布が重力逆方向に広がっているほど値が大きく成る)が適合度である。
処理ステップS104では、タイプ割り当て部104が算出されたカメラワークタイプの適合度{Dnm}N,M n=1,m=1を用いて各パノラマ画像に対してカメラワークタイプを割り当てる。ここで、Nはパノラマ画像の数、Mはカメラワークタイプの個数である。同じタイプのカメラワークが多く出現すると、全体の動画として変化に乏しいものとなるため、担当者が各タイプのカメラワークの最低出現回数B(各タイプのカメラワークの出現頻度)を予め決めておく。
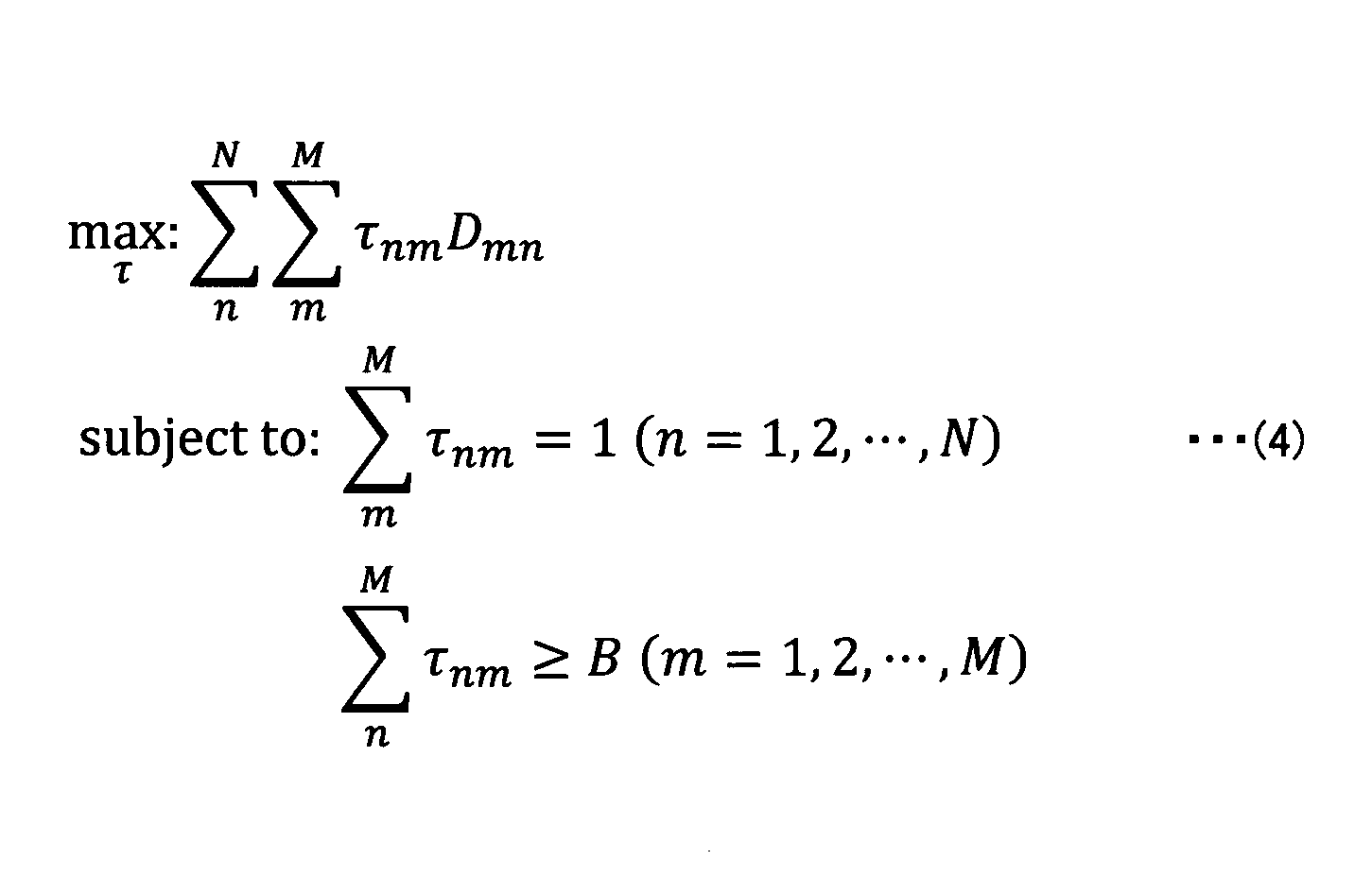
この整数計画問題の解法として、分枝限定法やメタヒューリスティクス(シミュレーティッドアニーリング、遺伝的アルゴリズム、タブーサーチなど)を用いることができる。特殊なケースとして、N=M,B=1の時にはハンガリー法により厳密解を求めることができる。
処理ステップS105では、動画符号化部105が設定されたカメラワークタイプで指定されるカメラワークに従って、各パノラマ画像から部分的な透視投影の動画を作成し1つの動画としてエンコーディングして出力する。以上で、パノラマ画像から品質の高い通常画角の動画を生成することができた。
以下では、第一の実施形態において好適な処理のバリエーションを説明する。
処理ステップS103における混合von Mises-Fisher分布のパラメータ推定において、ベイズ推定を用いることで推定結果を安定化させることもできる。すなわち、適合度算出部103は、パラメータ{αk, μk, κk}K k=1に対して事前分布を設定して、パラメータの事後分布を求める。これは変分ベイズ法を用いることで、近似計算が可能である。また、分布のパラメータ推定を経由せず、重要度分布からカメラワークタイプの適合度を直接算出することもできる。たとえば、水平移動のカメラワークタイプ(a)の場合、適合度算出部103は、方向v∈S2の重要度I(v)を式(5)のように重力方向g∈S2との内積に関する重みを使って積算して適合度を算出してもよい。

同様の考え方は、重力(逆)方向ステレオ投影回転のカメラワークタイプ(b)(c)でも用いることができ、重力(逆)方向の内積で重み付けして重要度を積算すればよい。

式(6)の評価関数によれば、重み{wnm∈R}N,M n=1,m=1を調整することで、特定のカメラワークタイプの出現頻度を高めたり、画像の出現順序に対してカメラワークタイプの出現頻度を変えたりすることができる。また制約条件についても、同じカメラワークタイプが連続しないように、式(7)の制約を加えることも有用である。
また、適合度の算出について、上の例では適合度算出部103はヒューリスティックに設計を行なっていた。しかし人手で設計するのは手間がかかり、かつ精度にも限界があるため、適合度算出関数を機械学習によって求めても良い。そのためには、担当者が、事前に作成した画像とカメラワークタイプのセットで生成した動画を被験者に提示し、被験者に適合度の値を付けてもらい、複数の{画像、カメラワークタイプ、適合度}の組を持つデータセットを構築する。そして、{画像、カメラワークタイプ}から適合度を推定する回帰モデルDを学習するという方法を取ることができる。回帰には線形回帰、ロジスティック回帰、サポートベクトル回帰、勾配ブースティング、又は、ニューラルネットワークなどを用いることができる。
第二の実施形態として、カメラワーク生成のモジュール(後述するカメラワーク生成部205)に与えるパラメータのセットの分類でカメラワークタイプを規定し、複数のパノラマ画像から1つの動画を生成する動画生成装置について説明する。
処理ステップS203では、適合度算出部203がパノラマ画像の重要度分布Iから事前に用意されたカメラワークのタイプの適合度を算出する。第二の実施形態におけるカメラワークのタイプとは、重要度分布からカメラワークを生成するカメラワーク生成部205におけるパラメータ(以降、生成パラメータという)を定めるものである。
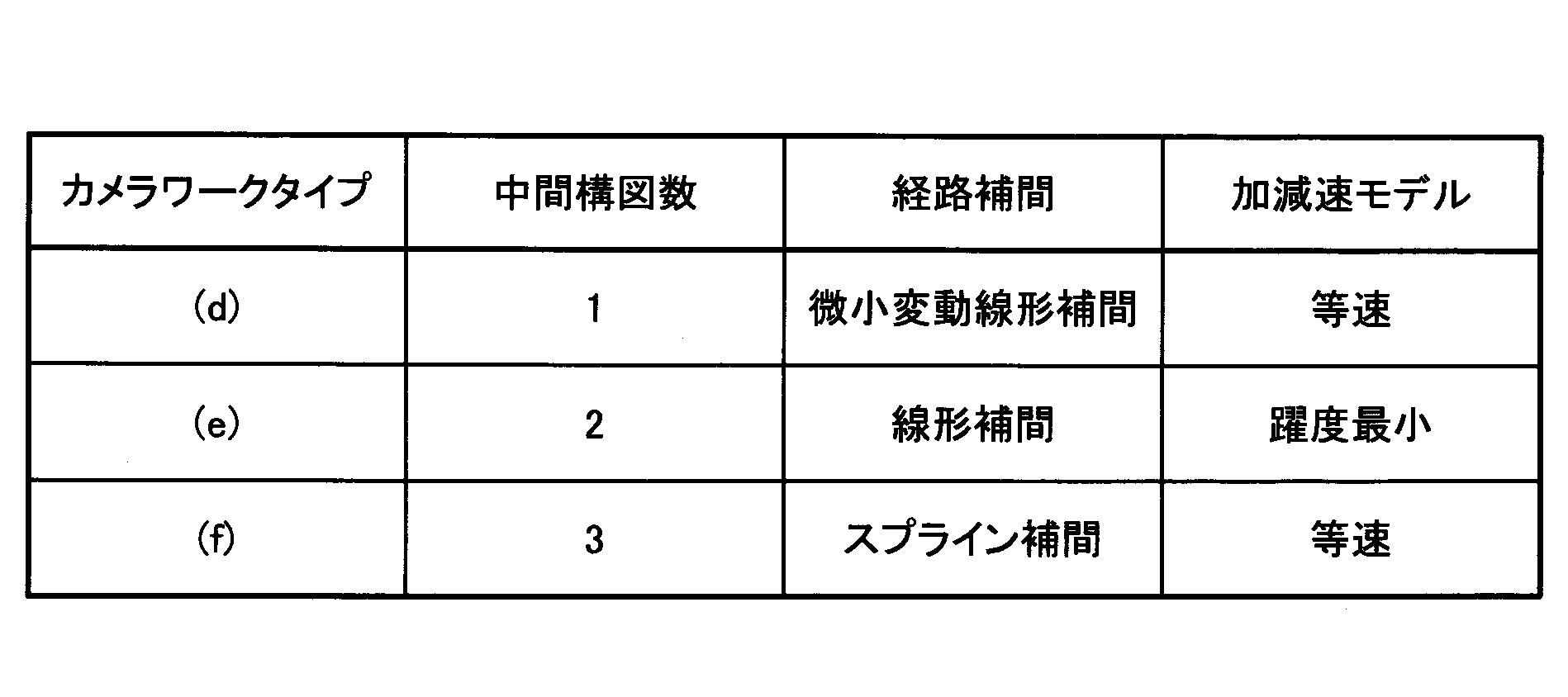
(d) 適合度算出部203が、1つの中間構図に対して微小変動を与えた経路を生成しその経路上を等速でカメラを動かす。
(e) 適合度算出部203が、2つの中間構図に対して線形補間で移動経路を生成し、仮想カメラをその経路上で加減速を伴い動かす。
(f) 適合度算出部203が、3つの中間構図に対してスプライン補間で移動経路を生成し、仮想カメラをその経路上で等速に動かす。
処理ステップS204では、タイプ割り当て部204が算出されたカメラワークの適合度{Dnm}N,M n=1,m=1を用いて各パノラマ画像に対してカメラワークを割り当てる。この処理は第一の実施形態における処理ステップS104と同様である。
処理ステップS205では、カメラワーク生成部205が割り当てられたカメラワークタイプに基づいて、各パノラマ画像に対してカメラワークを生成する。ここでは、処理ステップS202で求めた混合von Mises-Fisher分布のパラメータ{αk, μk, κk}K k=1を用いてカメラワーク生成部205がカメラワークを生成する例を述べる。

η∈(0,1)はハイパーパラメータである。ηが大きいほどγが大きくなり、γ→0(η→0),γ→2π(η→1)である。なお、この定式化はvon Mises-Fisher分布の中心角に対する累積密度関数の関係式から導出したものである。
ここでs∈[0,1]である。カメラワークタイプ(d)では仮想カメラが等速運動を行うので、時刻t=0,1,…,Tに対してsを式(10)のように設定する。

次にカメラワークタイプ(e)に関しては、カメラワーク生成部205が、まず、混合率{αk}K k=1の大きい方から2つの要素分布k1,k2を選択する。カメラワーク生成部205は、それぞれの要素分布の平均方向μk1,μk2を仮想カメラの光軸方向c1,c2とし、集中度κk1,κk2から仮想カメラの画角γ1,γ2を式(8)で算出する。
躍度最小モデルとは、二点間の軌道を加速度の微分である躍度の二乗の積分値が最小となるように生成するモデルである。躍度最小モデルは人間の手の運動を良好に再現することが知られている。なお、加減速のモデルは躍度最小モデルに限らず任意のモデルを用いることができる。
処理ステップS206では動画符号化部206が設定されたカメラワークに従って、各パノラマ画像から部分的な透視投影の動画を作成し1つの動画としてエンコーディングして出力する。
以下では、第二の実施形態において好適な処理のバリエーションを説明する。
第三の実施形態として、カメラワークタイプの数が入力画像数に対して非常に大きい場合、極端なケースではカメラワークタイプが無限個ある場合に、各パノラマ画像にカメラワークタイプを割り当て、カメラワークを生成し動画を出力する動画生成装置について説明する。
処理ステップS303では、適合度算出部303がパノラマ画像の重要度分布Iからカメラワークタイプの適合度を算出する。ここでは例として、第二の実施形態の(f)のカメラワークタイプを用い、式(10)における動画長Tを変数としてカメラワークタイプを分ける(たとえばT=300とT=500は異なるカメラワークタイプである)。
処理ステップS304では、タイプ割り当て部304が算出されたカメラワークの適合度Dnmを用いて各パノラマ画像に対してカメラワークを割り当てる。ここでは、タイプ割り当て部304は、カメラワークタイプm,m'間の距離d(m,m')を用いる。この距離が制約条件であり、典型的にはL2,L1などを用いることができる。

タイプ割り当て部304はこの最適化問題を求解し、割り当て{mn}N n=1を求める。最適化問題の解法としては、上記の例でm=Tとした場合は整数計画問題となり、分枝限定法やメタヒューリスティクスで解く(線形緩和して次の方法で解いて良い)。mnが実数である場合は、ペナルティ関数法、ラグランジュの未定乗数法、及び、一般化簡約勾配法など制約付き非線形計画法によって求解する。
処理ステップS305では、カメラワーク生成部305が割り当てられたカメラワークタイプに基づいて、各パノラマ画像に対してカメラワークを生成する。この処理は第二の実施形態における処理ステップS205と同様である。
処理ステップS306では動画符号化部306が設定されたカメラワークに従って、各パノラマ画像から部分的な透視投影の動画を作成し1つの動画としてエンコーディングして出力する。
処理ステップS304の制約条件として、カメラワークタイプ間の距離を制約条件とするのでなく、式(13)に示すように、評価関数に距離を組み込むこともできる。

式(13)において、λは適合度とカメラワークタイプ間の距離のバランスを調整するハイパーパラメータである。この最適化問題を制約なしの非線形計画法(最急降下法、ニュートン法、共役勾配法、滑降シンプレックス法、等)で求解してカメラワークタイプの割り当てを求めても良い。
第四の実施形態として、カメラワーク生成に条件付き敵対的生成ネットワーク(Conditional Generative Adversary Network, 以下CGANと略記)を用いる例を示す。CGANの枠組みでは、生成関数Gにパノラマ画像xと潜在変数zを入力して、カメラワークy=G(x,z)を得ることができる。潜在変数zによってカメラワークのバリエーションを得ることができるので、潜在変数zは第四の実施形態におけるカメラワークタイプとみなすことができる。
処理ステップS403では、タイプ割り当て部404が各パノラマ画像に対してカメラワークを割り当てる。第三の実施形態と同様に適合度とカメラワークタイプ間の距離に関する最適化問題を求解することでカメラワークタイプの割り当てを行うのだが、第四の実施形態ではこの最適化問題を式(14)のように構成する。

式(14)では、画像の集合をΧ、カメラワークタイプの集合をZ⊂RDz、カメラワークの集合をYとして、xn∈X,zn∈Z(n=1,2,…,N)であり、生成関数G:X×Z→Yと識別関数D:X×Y→[0,1]が事前にCAGNにおける敵対的学習により得られているものとする。
処理ステップS404では、カメラワーク生成部405が割り当てられたカメラワークタイプに基づいて、各パノラマ画像に対してカメラワークを生成する。すなわち最適化で得られたznに対してG(xn,zn)を計算する(n=1,2,…,N)。
処理ステップS405では動画符号化部406が定されたカメラワークに従って、各パノラマ画像から部分的な透視投影の動画を作成し1つの動画としてエンコーディングして出力する。
生成関数G、識別関数Dには任意の構成を用いることができる。生成関数Gの構成例としては、カメラワークタイプを入力画像のチャンネル方向に結合した上で畳み込みネットワーク(Convolutional Neural Network; CNN)で処理して特徴量を算出し、Recurrent Neural Network (RNN), Gated Recurrent Unit (GRU), Long Short-Term Memory (LSTM),又は、Transformerにより時系列データであるカメラワークを出力する構成を取ることができる。
以上、本発明を実施するための最良の形態について実施形態を用いて説明したが、本発明はこうした実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
101、201、301、401 画像取得部
102、202、302、402 重要度算出部
103、203、303、403 適合度算出部
104、204、304、404 タイプ割り当て部
105、206、306、406 動画符号化部
205、305、405 カメラワーク生成部
Claims (12)
- 複数のパノラマ画像から前記パノラマ画像よりも画角が狭い動画を生成する動画生成装置であって、
複数のパノラマ画像に対して、前記パノラマ画像の各領域の重要度分布に応じて仮想カメラのカメラワークタイプの適合度を算出する適合度算出部と、
前記適合度及び各カメラワークタイプの出現頻度に基づいて前記複数のパノラマ画像へのカメラワークタイプの割り当てを決定するタイプ割り当て部と、
割り当てられたカメラワークタイプで前記複数のパノラマ画像から前記パノラマ画像よりも画角が狭い動画を作成する動画符号化部と、
を備えることを特徴とする動画生成装置。 - 前記タイプ割り当て部は、カメラワークタイプの出現頻度を制約条件又は評価関数に組み込み、カメラワークタイプの適合度の和が最大となるように、前記複数のパノラマ画像へのカメラワークタイプの割り当てを決定することを特徴とする請求項1に記載の動画生成装置。
- 前記タイプ割り当て部は、
カメラワークタイプを構成するパラメータを軸とする空間にカメラワークタイプのパラメータ値を配置した場合の、前記空間における各カメラワークタイプ間の距離を算出し、
前記カメラワークタイプ間の距離を制約条件又は評価関数に組み込み、カメラワークタイプの適合度の和が最大となるように、前記複数のパノラマ画像へのカメラワークタイプの割り当てを決定することを特徴とする請求項1に記載の動画生成装置。 - 前記パノラマ画像の各領域の重要度を算出する重要度算出部を更に備え、
前記適合度算出部は、前記パノラマ画像における重要度の分布に応じてカメラワークタイプの適合度を算出することを特徴とする請求項1~3のいずれか1項に記載の動画生成装置。 - 前記パノラマ画像の各領域の重要度分布に関するパラメータ及び前記パノラマ画像を入力としてカメラワークを生成するカメラワーク生成部を更に備え、
前記カメラワーク生成部は、前記タイプ割り当て部が割り当てた前記カメラワークタイプに応じて前記パラメータを設定することを特徴とする請求項1~3のいずれか1項に記載の動画生成装置。 - 前記パノラマ画像の各領域の重要度を算出する重要度算出部を更に備え、
前記カメラワーク生成部が、前記パノラマ画像における重要度分布を、複数の分布を要素とする確率分布の混合分布とみなして、前記混合分布のパラメータに応じてカメラワークを生成することを特徴とする請求項5に記載の動画生成装置。 - 前記確率分布はvon Mises-Fisher分布であり、
前記カメラワーク生成部は、要素分布の平均方向を仮想カメラの光軸方向とし、要素分布の集中度に応じて仮想カメラの画角を決定し、
光軸方向と画角をペアとして異なるペアの光軸方向と画角の間を仮想カメラのパラメータが遷移するカメラワークを生成することを特徴とする請求項6に記載の動画生成装置。 - 前記カメラワーク生成部は、条件付き敵対的生成ネットワークによって実現されており、
前記条件付き敵対的生成ネットワークにおける潜在変数をカメラワークタイプとして、
前記パノラマ画像、及び、カメラワークタイプを前記条件付き敵対的生成ネットワークの入力として、カメラワークを生成することを特徴とする請求項5に記載の動画生成装置。 - 前記タイプ割り当て部は、前記潜在変数の空間における距離を制約条件又は評価関数に組み込み、
生成されたカメラワークに対し識別関数が出力する適合度の和が最大となるように、前記複数のパノラマ画像へのカメラワークタイプの割り当てを決定することを特徴とする請求項8に記載の動画生成装置。 - 複数のパノラマ画像から前記パノラマ画像よりも画角が狭い動画を生成する動画生成方法であって、
適合度算出部が、複数のパノラマ画像に対して、前記パノラマ画像の各領域の重要度分布に応じて仮想カメラのカメラワークタイプの適合度を算出するステップと、
タイプ割り当て部が、前記適合度及び各カメラワークタイプの出現頻度に基づいて前記複数のパノラマ画像へのカメラワークタイプの割り当てを決定するステップと、
動画符号化部が、割り当てられたカメラワークタイプで前記複数のパノラマ画像から前記パノラマ画像よりも画角が狭い動画を作成するステップと、
を備えることを特徴とする動画生成方法。 - 複数のパノラマ画像から前記パノラマ画像よりも画角が狭い動画を生成する動画生成装置を、
複数のパノラマ画像に対して、前記パノラマ画像の各領域の重要度分布に応じて仮想カメラのカメラワークタイプの適合度を算出する適合度算出部と、
前記適合度及び各カメラワークタイプの出現頻度に基づいて前記複数のパノラマ画像へのカメラワークタイプの割り当てを決定するタイプ割り当て部と、
割り当てられたカメラワークタイプで前記複数のパノラマ画像から前記パノラマ画像よりも画角が狭い動画を作成する動画符号化部、
として機能させるためのプログラム。 - 請求項11に記載したプログラムを記憶するコンピュータ読み取り可能な記憶媒体。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020217197A JP7608826B2 (ja) | 2020-12-25 | 2020-12-25 | 動画生成装置、動画生成方法、プログラム、記憶媒体 |
| EP21840707.0A EP4268443B1 (en) | 2020-12-25 | 2021-12-20 | Moving image generation apparatus, moving image generation method and program |
| PCT/JP2021/047061 WO2022138574A1 (en) | 2020-12-25 | 2021-12-20 | Moving image generation apparatus, moving image generation method, program, and recording medium |
| US18/267,801 US12452539B2 (en) | 2020-12-25 | 2021-12-20 | Moving image generation apparatus, moving image generation method, program, and recording medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020217197A JP7608826B2 (ja) | 2020-12-25 | 2020-12-25 | 動画生成装置、動画生成方法、プログラム、記憶媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022102461A JP2022102461A (ja) | 2022-07-07 |
| JP7608826B2 true JP7608826B2 (ja) | 2025-01-07 |
Family
ID=79316826
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020217197A Active JP7608826B2 (ja) | 2020-12-25 | 2020-12-25 | 動画生成装置、動画生成方法、プログラム、記憶媒体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12452539B2 (ja) |
| EP (1) | EP4268443B1 (ja) |
| JP (1) | JP7608826B2 (ja) |
| WO (1) | WO2022138574A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7350510B2 (ja) * | 2019-05-14 | 2023-09-26 | キヤノン株式会社 | 電子機器、電子機器の制御方法、プログラム、及び、記憶媒体 |
| CN116246085B (zh) * | 2023-03-07 | 2024-01-30 | 北京甲板智慧科技有限公司 | 用于ar望远镜的方位角生成方法和装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007020789A1 (ja) | 2005-08-12 | 2007-02-22 | Sony Computer Entertainment Inc. | 顔画像表示装置、顔画像表示方法及び顔画像表示プログラム |
| JP2018151887A (ja) | 2017-03-13 | 2018-09-27 | 株式会社リコー | 画像処理装置、画像処理方法およびプログラム |
| JP2020177495A (ja) | 2019-04-19 | 2020-10-29 | 株式会社リコー | 動画生成装置、動画生成方法、プログラム、記憶媒体 |
Family Cites Families (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57149141A (en) | 1981-03-12 | 1982-09-14 | Toyoda Mach Works Ltd | Equipment for generating paraboloid of revolution |
| JPS5861499U (ja) * | 1981-10-17 | 1983-04-25 | 石川島播磨重工業株式会社 | 製紙用ドラムドライヤ |
| JP2004241834A (ja) | 2003-02-03 | 2004-08-26 | Sony Corp | 動画像生成装置及び方法、動画像送信システム、プログラム並びに記録媒体 |
| JP3944456B2 (ja) | 2003-02-06 | 2007-07-11 | 株式会社バンダイナムコゲームス | プログラム、情報記憶媒体及びゲーム装置 |
| JP2005056101A (ja) | 2003-08-04 | 2005-03-03 | Matsushita Electric Ind Co Ltd | 音楽データと連動したcgアニメーション装置 |
| JP4298588B2 (ja) | 2004-05-31 | 2009-07-22 | 株式会社リコー | 情報検出装置および情報検出方法 |
| JP2006155241A (ja) | 2004-11-29 | 2006-06-15 | Ricoh Co Ltd | 視認署名付文書生成装置、視認署名付文書生成方法、視認署名付文書生成プログラム、およびコンピュータに読み取り可能な記録媒体 |
| JP4532331B2 (ja) | 2004-12-08 | 2010-08-25 | 株式会社リコー | 情報埋め込み装置、情報抽出装置、情報埋め込み方法、情報抽出方法、情報埋め込みプログラム、及び情報抽出プログラム |
| JP2006172037A (ja) | 2004-12-15 | 2006-06-29 | Toppan Printing Co Ltd | 仮想現実システム、方法、ソフトウェア、及びそのソフトウェアを記録した記録媒体 |
| JP4393983B2 (ja) | 2004-12-22 | 2010-01-06 | 株式会社リコー | 視認署名情報生成装置、視認署名付文書表示装置、視認署名情報生成方法、視認署名付文書表示方法、視認署名情報生成プログラム、視認署名付文書表示プログラムおよびコンピュータに読み取り可能な記録媒体 |
| JP4393984B2 (ja) | 2004-12-22 | 2010-01-06 | 株式会社リコー | 視認署名付文書生成装置、視認署名付文書生成方法、視認署名付文書生成プログラム、およびコンピュータに読み取り可能な記録媒体 |
| JP4393985B2 (ja) | 2004-12-22 | 2010-01-06 | 株式会社リコー | 視認署名付情報生成装置、画像形成装置、プリンタドライバプログラム、視認署名付文書生成機能拡張プログラム、視認署名付情報生成方法及び画像形成方法 |
| JP4390723B2 (ja) | 2005-02-08 | 2009-12-24 | 株式会社リコー | 情報埋め込み装置、情報抽出装置、情報埋め込み方法、情報抽出方法、情報埋め込みプログラム、情報抽出プログラム及び記録媒体 |
| JP4754236B2 (ja) | 2005-02-21 | 2011-08-24 | 株式会社リコー | 情報処理装置、取得方法、及び取得プログラム |
| JP4485989B2 (ja) | 2005-05-06 | 2010-06-23 | 株式会社リコー | 情報取得装置、情報取得方法、情報取得プログラム及び記録媒体 |
| JP2007143123A (ja) | 2005-10-20 | 2007-06-07 | Ricoh Co Ltd | 画像処理装置、画像処理方法、画像処理プログラム及び記録媒体 |
| JP4575873B2 (ja) | 2005-11-14 | 2010-11-04 | 株式会社リコー | 画像処理装置 |
| JP4625406B2 (ja) | 2005-12-21 | 2011-02-02 | 株式会社リコー | 情報埋め込み装置、情報抽出装置、情報埋め込み方法、情報抽出方法、情報埋め込みプログラム、情報抽出プログラム、及び、情報記憶媒体 |
| JP2008019215A (ja) | 2006-07-13 | 2008-01-31 | Nippon Soda Co Ltd | 殺菌剤組成物 |
| JP4740166B2 (ja) | 2007-01-31 | 2011-08-03 | 株式会社リコー | 画像形成装置、画像形成システム、画像形成方法、プログラム、および記録媒体 |
| JP4667411B2 (ja) | 2007-03-12 | 2011-04-13 | パナソニック株式会社 | コンテンツ撮影装置 |
| US8643745B2 (en) | 2007-03-12 | 2014-02-04 | Panasonic Corporation | Content shooting apparatus |
| US8149451B2 (en) | 2007-07-18 | 2012-04-03 | Ricoh Company, Ltd. | Information processing device, information embedding method, and program |
| JP5036643B2 (ja) | 2007-07-18 | 2012-09-26 | 株式会社リコー | 情報処理装置、情報処理方法、及びプログラム |
| JP4799514B2 (ja) | 2007-09-18 | 2011-10-26 | 株式会社リコー | 符号化処理装置、符号化処理方法、及び符号化処理プログラム |
| JP4943354B2 (ja) | 2008-02-11 | 2012-05-30 | 株式会社リコー | 情報識別装置、情報識別方法、プログラム及び記録媒体 |
| JP2010041710A (ja) | 2008-07-11 | 2010-02-18 | Ricoh Co Ltd | 埋込情報検出装置、埋込情報検出方法、プログラムおよび記録媒体 |
| JP5223702B2 (ja) | 2008-07-29 | 2013-06-26 | 株式会社リコー | 画像処理装置、ノイズ低減方法、プログラム、記憶媒体 |
| JP5117982B2 (ja) | 2008-10-07 | 2013-01-16 | 株式会社リコー | 情報抽出装置、情報抽出方法、プログラムおよび記録媒体 |
| JP5190697B2 (ja) | 2008-10-31 | 2013-04-24 | 株式会社リコー | 情報埋め込み装置、情報埋め込み方法、コンテンツ処理装置、コンテンツ処理方法、情報埋め込みプログラム、コンテンツ処理プログラムおよび記録媒体 |
| JP5251637B2 (ja) | 2009-03-16 | 2013-07-31 | 株式会社リコー | ノイズ低減装置、ノイズ低減方法、ノイズ低減プログラム、記録媒体 |
| JP5326920B2 (ja) | 2009-08-07 | 2013-10-30 | 株式会社リコー | 画像処理装置、画像処理方法、及び、コンピュータプログラム |
| JP5488983B2 (ja) | 2010-03-16 | 2014-05-14 | 株式会社リコー | 画像情報処理方法、画像情報処理装置、及び記録媒体 |
| JP5455032B2 (ja) | 2009-12-01 | 2014-03-26 | 株式会社リコー | 画像情報処理方法、画像情報処理装置、及び記録媒体 |
| CA2780309C (en) | 2009-12-01 | 2014-06-03 | Ricoh Company, Ltd. | Image information processing method, image information processing apparatus, image processing apparatus, and recording medium |
| JP2012186738A (ja) | 2011-03-07 | 2012-09-27 | Ricoh Co Ltd | 色推定装置、画像形成装置、色推定方法、色推定プログラム、及び記録媒体 |
| JP5810778B2 (ja) | 2011-09-15 | 2015-11-11 | 株式会社リコー | 画像処理装置および画像処理方法 |
| JP5838733B2 (ja) | 2011-11-01 | 2016-01-06 | 株式会社リコー | 画像形成装置、画像形成方法、画像形成プログラム及び記録媒体 |
| JP6024107B2 (ja) | 2012-01-06 | 2016-11-09 | 株式会社リコー | 画像処理装置、撮像装置、画像処理方法およびプログラム |
| JP5880121B2 (ja) | 2012-02-21 | 2016-03-08 | 株式会社リコー | 画像処理装置 |
| JP5861499B2 (ja) | 2012-03-01 | 2016-02-16 | 大日本印刷株式会社 | 動画提示装置 |
| JP2013186560A (ja) | 2012-03-06 | 2013-09-19 | Ricoh Co Ltd | 画像処理装置 |
| JP6172495B2 (ja) | 2012-12-28 | 2017-08-02 | 株式会社リコー | 校正装置、装置、プロジェクタ、3次元スキャナ、校正方法、方法、プログラム、及び記憶媒体 |
| JP6065670B2 (ja) | 2013-03-13 | 2017-01-25 | 株式会社リコー | 3次元計測システム、プログラム及び方法。 |
| JP6079333B2 (ja) | 2013-03-15 | 2017-02-15 | 株式会社リコー | 校正装置、方法及びプログラム |
| US10438633B2 (en) | 2013-05-26 | 2019-10-08 | Pixellot Ltd. | Method and system for low cost television production |
| JP5942932B2 (ja) | 2013-07-04 | 2016-06-29 | ブラザー工業株式会社 | 端末装置、及びプログラム |
| JP2015022561A (ja) | 2013-07-19 | 2015-02-02 | Necパーソナルコンピュータ株式会社 | 端末装置、広告配信システムおよびプログラム |
| JP6217227B2 (ja) | 2013-08-12 | 2017-10-25 | 株式会社リコー | 校正装置、方法及びプログラム |
| JP6299269B2 (ja) | 2014-02-24 | 2018-03-28 | 株式会社リコー | 画像処理システム、プログラム及び投影装置 |
| JP6394005B2 (ja) | 2014-03-10 | 2018-09-26 | 株式会社リコー | 投影画像補正装置、投影する原画像を補正する方法およびプログラム |
| JP2016100698A (ja) | 2014-11-19 | 2016-05-30 | 株式会社リコー | 校正装置、校正方法、プログラム |
| JP2016212784A (ja) | 2015-05-13 | 2016-12-15 | 株式会社リコー | 画像処理装置、画像処理方法 |
| JP6511950B2 (ja) | 2015-05-14 | 2019-05-15 | 株式会社リコー | 画像処理装置、画像処理方法及びプログラム |
| JP6613686B2 (ja) | 2015-07-29 | 2019-12-04 | 株式会社リコー | 動画表示装置、動画表示方法、およびプログラム |
| JP6613687B2 (ja) | 2015-07-30 | 2019-12-04 | 株式会社リコー | 画像処理装置、画像処理方法及びプログラム |
| JP6642261B2 (ja) | 2016-05-16 | 2020-02-05 | 株式会社リコー | 情報処理装置、方法、プログラムおよび記録媒体 |
| JP6675584B2 (ja) | 2016-05-16 | 2020-04-01 | 株式会社リコー | 画像処理装置、画像処理方法およびプログラム |
| JP6717049B2 (ja) | 2016-05-19 | 2020-07-01 | 株式会社リコー | 画像解析装置、画像解析方法およびプログラム |
| JP6798183B2 (ja) | 2016-08-04 | 2020-12-09 | 株式会社リコー | 画像解析装置、画像解析方法およびプログラム |
| CN109151295B (zh) | 2017-06-16 | 2020-04-03 | 杭州海康威视数字技术股份有限公司 | 一种目标对象抓拍方法、装置及视频监控设备 |
| US10701263B2 (en) | 2017-07-18 | 2020-06-30 | Ricoh Company, Ltd. | Browsing system, image distribution apparatus, and image distribution method |
| JP7069970B2 (ja) | 2017-07-18 | 2022-05-18 | 株式会社リコー | 閲覧システム、画像配信装置、画像配信方法、プログラム |
| JP7031168B2 (ja) | 2017-08-10 | 2022-03-08 | 株式会社リコー | 閲覧システム、情報処理装置、画像配信方法、プログラム |
| JP7031228B2 (ja) | 2017-10-26 | 2022-03-08 | 株式会社リコー | プログラム、画像表示方法、画像表示システム、情報処理装置 |
| JP2020013552A (ja) | 2018-07-04 | 2020-01-23 | 株式会社リコー | 端末装置、閲覧システム、表示方法、及びプログラム |
| US10991342B2 (en) | 2018-07-04 | 2021-04-27 | Ricoh Company, Ltd. | Terminal apparatus, system, and method of displaying image |
| KR102464944B1 (ko) | 2018-10-19 | 2022-11-09 | 한국과학기술원 | 카메라 워크를 재현하는 방법 및 장치 |
| JP2020154457A (ja) | 2019-03-18 | 2020-09-24 | 株式会社リコー | 画像表示システム、画像配信方法、プログラム |
| US12367546B2 (en) * | 2019-12-24 | 2025-07-22 | Nvidia Corporation | Panorama generation using one or more neural networks |
-
2020
- 2020-12-25 JP JP2020217197A patent/JP7608826B2/ja active Active
-
2021
- 2021-12-20 WO PCT/JP2021/047061 patent/WO2022138574A1/en not_active Ceased
- 2021-12-20 US US18/267,801 patent/US12452539B2/en active Active
- 2021-12-20 EP EP21840707.0A patent/EP4268443B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007020789A1 (ja) | 2005-08-12 | 2007-02-22 | Sony Computer Entertainment Inc. | 顔画像表示装置、顔画像表示方法及び顔画像表示プログラム |
| JP2018151887A (ja) | 2017-03-13 | 2018-09-27 | 株式会社リコー | 画像処理装置、画像処理方法およびプログラム |
| JP2020177495A (ja) | 2019-04-19 | 2020-10-29 | 株式会社リコー | 動画生成装置、動画生成方法、プログラム、記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022138574A1 (en) | 2022-06-30 |
| US20240048850A1 (en) | 2024-02-08 |
| EP4268443A1 (en) | 2023-11-01 |
| JP2022102461A (ja) | 2022-07-07 |
| US12452539B2 (en) | 2025-10-21 |
| EP4268443B1 (en) | 2025-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Liu et al. | Video frame synthesis using deep voxel flow | |
| Cole et al. | Synthesizing normalized faces from facial identity features | |
| US9747668B2 (en) | Reconstruction of articulated objects from a moving camera | |
| EP3539078B1 (en) | Video frame synthesis with deep learning | |
| US5745668A (en) | Example-based image analysis and synthesis using pixelwise correspondence | |
| WO2022147736A1 (zh) | 虚拟图像构建方法、装置、设备及存储介质 | |
| CN118552596B (zh) | 一种基于多视图自监督学习的深度估计方法 | |
| CN110298916B (zh) | 一种基于合成深度数据的三维人体重建方法 | |
| US20220215617A1 (en) | Viewpoint image processing method and related device | |
| US20220207646A1 (en) | Image generators with conditionally-independent pixel synthesis | |
| CN112233165A (zh) | 一种基于多平面图像学习视角合成的基线扩展实现方法 | |
| JP2017211939A (ja) | 生成装置、生成方法、及び生成プログラム | |
| JP7608826B2 (ja) | 動画生成装置、動画生成方法、プログラム、記憶媒体 | |
| US20240078773A1 (en) | Electronic device generating 3d model of human and its operation method | |
| JP7310252B2 (ja) | 動画生成装置、動画生成方法、プログラム、記憶媒体 | |
| WO2024099319A1 (zh) | 虚拟视频图像生成方法、装置、设备和介质 | |
| US12190440B2 (en) | Method of generating multi-layer representation of scene and computing device implementing the same | |
| US20210227249A1 (en) | Computer Vision Systems and Methods for Compositional Pixel-Level Prediction | |
| JP7566075B2 (ja) | 仮想試着画像を提供するためのコンピュータ装置、及びその方法、及びプログラム | |
| CN115460372B (zh) | 虚拟图像构建方法、装置、设备及存储介质 | |
| Yin et al. | Novel view synthesis for large-scale scene using adversarial loss | |
| Jashari et al. | Evaluating AI-based static stereoscopic rendering of indoor panoramic scenes | |
| Khan et al. | Towards monocular neural facial depth estimation: Past, present, and future | |
| CN114821659A (zh) | 一种基于双流网络的人体动作识别方法及系统 | |
| US20250200771A1 (en) | Image processing device and operating method thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231011 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240723 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240919 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7608826 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |