JP7439060B2 - ベビーカーフレーム及びベビーカー - Google Patents
ベビーカーフレーム及びベビーカー Download PDFInfo
- Publication number
- JP7439060B2 JP7439060B2 JP2021514583A JP2021514583A JP7439060B2 JP 7439060 B2 JP7439060 B2 JP 7439060B2 JP 2021514583 A JP2021514583 A JP 2021514583A JP 2021514583 A JP2021514583 A JP 2021514583A JP 7439060 B2 JP7439060 B2 JP 7439060B2
- Authority
- JP
- Japan
- Prior art keywords
- stroller frame
- stroller
- motor
- force
- frame according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000008878 coupling Effects 0.000 claims description 27
- 238000010168 coupling process Methods 0.000 claims description 27
- 238000005859 coupling reaction Methods 0.000 claims description 27
- 230000001105 regulatory effect Effects 0.000 claims description 16
- 230000001276 controlling effect Effects 0.000 claims description 13
- 238000000034 method Methods 0.000 claims description 11
- 230000008859 change Effects 0.000 claims description 10
- 238000003860 storage Methods 0.000 claims description 8
- 230000000903 blocking effect Effects 0.000 claims description 5
- 230000007363 regulatory process Effects 0.000 claims description 5
- 238000004904 shortening Methods 0.000 claims description 5
- 230000008569 process Effects 0.000 claims description 2
- 230000009467 reduction Effects 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000003750 conditioning effect Effects 0.000 description 3
- 230000011664 signaling Effects 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 230000004308 accommodation Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000006735 deficit Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B9/00—Accessories or details specially adapted for children's carriages or perambulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B7/00—Carriages for children; Perambulators, e.g. dolls' perambulators
- B62B7/04—Carriages for children; Perambulators, e.g. dolls' perambulators having more than one wheel axis; Steering devices therefor
- B62B7/06—Carriages for children; Perambulators, e.g. dolls' perambulators having more than one wheel axis; Steering devices therefor collapsible or foldable
- B62B7/062—Coupling unit between front wheels, rear wheels and handle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B2206/00—Adjustable or convertible hand-propelled vehicles or sledges
- B62B2206/003—Adjustable or convertible hand-propelled vehicles or sledges with actuation mechanisms which drive the adjustment or conversion operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0026—Propulsion aids
- B62B5/0033—Electric motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0026—Propulsion aids
- B62B5/0033—Electric motors
- B62B5/0056—Energy recuperation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0026—Propulsion aids
- B62B5/0069—Control
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Health & Medical Sciences (AREA)
- Public Health (AREA)
- Carriages For Children, Sleds, And Other Hand-Operated Vehicles (AREA)
- Handcart (AREA)
Description
以下に、本願出願の当初の特許請求の範囲に記載された発明を付記する。
[1]
ベビーカーフレームであって、
前記ベビーカーフレームの好ましくは支持された駆動のための少なくとも1つのモーター(19)、特に電気モーターと、
前記ベビーカーフレームの少なくとも1つの調整可能な構成要素を第1位置から少なくとも1つの第2位置に調整する、特にスライド及び/又は旋回させるための少なくとも1つの調整装置(20)と、
前記調整装置(20)による少なくとも1つの調整プロセスによって、前記少なくとも1つのモーターの潜在的な駆動力の変化、特に減少、がもたらせるような、少なくとも1つの結合装置(21)、好ましくは少なくとも1つのスイッチング装置と、を備えるベビーカーフレーム。
[2]
前記結合装置(21)は、前記調整手段(20)による少なくとも1つの調整プロセスにより、前記モーター(19)がスイッチオフにされる、又は前記モーター(19)がアイドル状態に移行することをもたらすように構成される、ことを特徴とする、[1]に記載のベビーカーフレーム。
[3]
前記結合装置(21)は、前記モーターへの電力供給が遮断可能又は遮断されるように、及び/又は前記調整装置による少なくとも1つの調整プロセスによって達成され得るか、又は達成されるように構成される、ことを特徴とする、[1]又は[2]に記載のベビーカーフレーム。
[4]
前記結合装置(21)は、少なくとも1つのスライド接点及び/又は少なくとも1つのプラグ接点及び/又は少なくとも1つのスイッチ及び/又は少なくとも1つのケーブル及び/又は少なくとも1つのロッドを備える、ことを特徴とする、[1]乃至[3]のいずれか1つに記載のベビーカーフレーム。
[5]
前記ベビーカーフレームの好ましく支持された駆動のための少なくとも1つのモーター(19)、特に電気モーターと、
少なくとも2つの異なる位置の間で前記ベビーカーフレームの少なくとも1つの調整可能な構成要素を調整するための、特にスライド及び/又は旋回するための少なくとも1つの調整装置(20)と、
前記ベビーカーフレームの前記調整可能な構成要素及び前記ベビーカーフレームの別の構成要素の間の少なくとも1つのスライド接点と、を備え、
好ましくは、前記調整可能な構成要素の少なくとも第1及び第3位置での前記スライド接点によって、電気的接触が実現され、おそらく、少なくとも第2位置では、接触は実現されない、[1]乃至[4]のいずれか1つに記載のベビーカーフレーム。
[6]
前記調整装置(20)は、フレーム(11)及び/又はフレーム部品、特にプッシャー及び/又はプッシャー構成要素(12、13)を調整、特に短縮及び/又は折り畳むように設計されている、ことを特徴とする、[1]乃至[5]のいずれか1つに記載のベビーカーフレーム。
[7]
前記調整装置(20)は、ブレーキ装置、特にパーキングブレーキ(18)を調整するために設計されている、ことを特徴とする、[1]乃至[6]のいずれか1つに記載のベビーカーフレーム。
[8]
前記調整は、少なくとも3cm、好ましくは少なくとも8cmの前記調整可能な構成要素の相対的な動作、及び/又は、少なくとも20°、場合によっては少なくとも60°の角度での前記調整可能な構成要素の回転を有する、ことを特徴とする、[1]乃至[7]のいずれか1つに記載のベビーカーフレーム。
[9]
前記第1及び/又は第2位置は、安定して想定でき、特にロック可能である、ことを特徴とする、[1]乃至[8]のいずれか1つに記載のベビーカーフレーム。
[10]
前記調整可能な構成要素に関する前記第1位置は、機能的な位置であり、及び/又は前記調整可能な構成要素に関する前記第2位置は、休止位置、特に保管、パーキング、ブロック、及び/又は中間の位置である、ことを特徴とする、[1]乃至[9]のいずれか1つに記載のベビーカーフレーム。
[11]
好ましくは、前記プッシャーに作用する力及び/又は力成分の方向及び/又は量を検出するために、及び/又はこの力又は力成分から導出された変数、特に時間の経過に伴う前記力又は力成分の変化を検出するための、少なくとも1つの速度センサー装置及び/又は少なくとも1つの力センサー装置を備える、ことを特徴とする、[1]乃至[10]のいずれか1つに記載のベビーカーフレーム。
[12]
前記少なくとも1つのモーターの電力及び/又は前記ベビーカーフレームの速度を制御、特に調整するための少なくとも1つの制御装置を備える、ことを特徴とする、[1]乃至[11]のいずれか1つに記載のベビーカーフレーム。
[13]
[1]乃至[12]に記載のいずれか1つに記載のベビーカーフレームを有するベビーカー、例えば、子供用のスポーツカー、バギーなどの子供のための車両。
[14]
少なくとも1つのモーターの潜在的な駆動力を制御するために、特に[1]乃至[12]のいずれか1つに記載のベビーカーフレーム又は、特に[13]に記載のベビーカーの少なくとも1つの調整可能な構成要素を第1位置から第2位置に調整、特にスライド及び/又は旋回するための調整装置(20)の使用法。
[15]
特に[1]乃至[12]のいずれか1つに記載のベビーカーフレーム又は、特に[13]に記載のベビーカーの少なくとも1つのモーターの潜在的な駆動力を制御するための方法であって、
前記潜在的な駆動力は、前記ベビーカーフレームの少なくとも1つの調整可能な構成要素を第1位置から第2位置に調整、特にスライド及び/又は旋回させるための少なくとも1つの調整装置(20)を介して変更、特に減少される、方法。
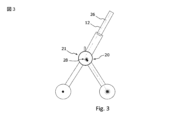
11 フレーム
12 上部プッシャーセクション
13 下部プッシャーセクション(プッシャーシャフト)
14 前ホイールストラット
15 後ホイールストラット
16 前ホイール
17 後ホイール
18 パーキングブレーキ
19 モーター
20 調整装置
21 結合装置
22 第1接点
23 第2接点
24 ケーブル
25 (回転可能)ジョイント
26 ケーブル
27 ケーブル
28 プラグ接続
29 (ばねで留められた)スイッチングユニット
30 遮断凸部(接点ピン)
31 スイッチ
Claims (27)
- ベビーカーフレームであって、
少なくとも1つのモーター(19)と、
前記ベビーカーフレームの少なくとも1つの調整可能な構成要素を第1位置から少なくとも1つの第2位置に調整する、少なくとも1つの調整装置(20)と、
前記調整装置(20)による少なくとも1つの調整プロセスによって、前記少なくとも1つのモーターの潜在的な駆動力の変化がもたらせるような、少なくとも1つの結合装置(21)と、を備え、
前記第1及び第2位置は、安定して想定できる、ことを特徴とする、ベビーカーフレーム。 - 前記少なくとも1つのモーター(19)は、電気モーターである、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記少なくとも1つのモーター(19)は、前記ベビーカーフレームの支持された駆動のためのものである、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記少なくとも1つの調整装置(20)は、前記ベビーカーフレームの少なくとも1つの調整可能な構成要素をスライド及び/又は旋回させるためのものである、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記少なくとも1つの結合装置(21)は、少なくとも1つのスイッチング装置を備える、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記潜在的な駆動力の変化は、前記潜在的な駆動力の減少である、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記結合装置(21)は、前記調整装置(20)による少なくとも1つの調整プロセスにより、前記モーター(19)がスイッチオフにされる、又は前記モーター(19)がアイドル状態に移行することをもたらすように構成される、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記結合装置(21)は、前記モーターへの電力供給が遮断可能又は遮断されるように、及び/又は前記調整装置による少なくとも1つの調整プロセスによって達成され得るか、又は達成されるように構成される、ことを特徴とする、請求項1又は7に記載のベビーカーフレーム。
- 前記結合装置(21)は、少なくとも1つのスライド接点及び/又は少なくとも1つのプラグ接点及び/又は少なくとも1つのスイッチ及び/又は少なくとも1つのケーブル及び/又は少なくとも1つのロッドを備える、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記ベビーカーフレームの前記調整可能な構成要素及び前記ベビーカーフレームの別の構成要素の間の少なくとも1つのスライド接点と、をさらに備え、
前記調整可能な構成要素の少なくとも前記第1及び第3位置での前記スライド接点によって、電気的接触が実現され、少なくとも前記第2位置では、接触は実現されない、請求項1に記載のベビーカーフレーム。 - 前記調整装置(20)は、フレーム(11)及び/又はフレーム部品を調整するために設計されている、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記調整装置(20)は、フレーム(11)及び/又はフレーム部品を短縮及び/又は折り畳むように設計されている、ことを特徴とする、請求項11に記載のベビーカーフレーム。
- 前記調整装置(20)は、プッシャー及び/又はプッシャー構成要素(12、13)を短縮及び/又は折り畳むように設計されている、ことを特徴とする、請求項11または12に記載のベビーカーフレーム。
- 前記調整装置(20)は、ブレーキ装置を調整するために設計されている、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記ブレーキ装置は、パーキングブレーキ(18)である、ことを特徴とする、請求項14に記載のベビーカーフレーム。
- 前記調整は、少なくとも3cmの前記調整可能な構成要素の相対的な動作、及び/又は、少なくとも20°の角度での前記調整可能な構成要素の回転を有する、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記第1及び/又は第2位置は、ロック可能である、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記調整可能な構成要素に関する前記第1位置は、機能的な位置であり、及び/又は前記調整可能な構成要素に関する前記第2位置は、休止位置である、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記休止位置は、保管、パーキング、ブロック、及び/又は中間の位置である、ことを特徴とする、請求項18に記載のベビーカーフレーム。
- 少なくとも1つの速度センサー装置及び/又は少なくとも1つの力センサー装置を備える、ことを特徴とする、請求項1に記載のベビーカーフレーム。
- 前記少なくとも1つの速度センサー装置及び/又は少なくとも1つの力センサー装置は、プッシャーに作用する力及び/又は力成分の方向及び/又は量を検出する、及び/又はこの力又は力成分から導出された変数を検出するためのものである、ことを特徴とする、請求項20に記載のベビーカーフレーム。
- 前記力又は力成分から導出された変数は、時間の経過に伴う前記力又は力成分の変化である、ことを特徴とする、請求項21に記載のベビーカーフレーム。
- 前記少なくとも1つのモーターの電力及び/又は前記ベビーカーフレームの速度を制御するための少なくとも1つの制御装置を備える、ことを特徴とする、請求項1乃至22のいずれか1項に記載のベビーカーフレーム。
- 前記少なくとも1つの制御装置は、前記少なくとも1つのモーターの電力及び/又は前記ベビーカーフレームの速度を調整する、ことを特徴とする、請求項23に記載のベビーカーフレーム。
- 請求項1に記載のベビーカーフレームを有するベビーカー。
- 少なくとも1つのモーターの潜在的な駆動力を制御するために、請求項1に記載のベビーカーフレーム又は、請求項25に記載のベビーカーの少なくとも1つの調整可能な構成要素を第1位置から第2位置に調整するための調整装置(20)の使用法。
- 請求項1に記載のベビーカーフレーム又は、請求項25に記載のベビーカーの少なくとも1つのモーターの潜在的な駆動力を制御するための方法であって、
前記潜在的な駆動力は、前記ベビーカーフレームの少なくとも1つの調整可能な構成要素を第1位置から第2位置に調整させるための少なくとも1つの調整装置(20)を介して変更される、方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE202018105345.0U DE202018105345U1 (de) | 2018-09-18 | 2018-09-18 | Kinderwagengestell und Kinderwagen |
| DE202018105345.0 | 2018-09-18 | ||
| PCT/EP2019/074039 WO2020058029A1 (de) | 2018-09-18 | 2019-09-10 | Kinderwagengestell und kinderwagen |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022500302A JP2022500302A (ja) | 2022-01-04 |
| JPWO2020058029A5 JPWO2020058029A5 (ja) | 2022-09-26 |
| JP7439060B2 true JP7439060B2 (ja) | 2024-02-27 |
Family
ID=67999606
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021514583A Active JP7439060B2 (ja) | 2018-09-18 | 2019-09-10 | ベビーカーフレーム及びベビーカー |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11485398B2 (ja) |
| EP (1) | EP3853100A1 (ja) |
| JP (1) | JP7439060B2 (ja) |
| KR (1) | KR20210060553A (ja) |
| CN (1) | CN112912300B (ja) |
| DE (1) | DE202018105345U1 (ja) |
| WO (1) | WO2020058029A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202018105345U1 (de) | 2018-09-18 | 2019-12-19 | Cybex Gmbh | Kinderwagengestell und Kinderwagen |
| CN111137348A (zh) * | 2020-01-13 | 2020-05-12 | 好孩子儿童用品有限公司 | 智能助力儿童推车 |
| DE102021120796A1 (de) | 2021-08-10 | 2023-02-16 | Cybex Gmbh | Kinderwagen, Gestell und Verfahren zum automatischen Schaukeln |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010534156A (ja) | 2007-02-12 | 2010-11-04 | ステラクライム リミテッド ライアビリティ カンパニー | 階段昇降車両 |
| WO2015053086A1 (ja) | 2013-10-11 | 2015-04-16 | 株式会社村田製作所 | 手押し車 |
| JP2016005951A (ja) | 2014-06-16 | 2016-01-14 | サイベックス ゲーエムベーハー | ベビーカーフレーム及びベビーカー |
| CN205854248U (zh) | 2016-06-20 | 2017-01-04 | 好孩子儿童用品有限公司 | 一种助力儿童推车 |
| WO2017042959A1 (ja) | 2015-09-11 | 2017-03-16 | コンビ株式会社 | 乳母車 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3733698A1 (de) * | 1987-10-06 | 1989-04-20 | Lindemer Wilhelm Dipl Ing Fh | Kinderwagen |
| DE4328567C2 (de) * | 1993-08-25 | 1995-09-28 | Albert Wegner | Längs und quer zusammenfaltbares Kinderwagengestell |
| CN1136910A (zh) * | 1994-11-25 | 1996-12-04 | 康碧株式会社 | 可折叠的座具 |
| US5937961A (en) * | 1996-06-12 | 1999-08-17 | Davidson; Wayne | Stroller including a motorized wheel assembly |
| CN1126679C (zh) * | 1999-07-05 | 2003-11-05 | 英属维京群岛商育丰有限公司 | 婴儿车的刹车装置 |
| ES1044890Y (es) * | 1999-11-16 | 2000-11-16 | Serrano Martin Blas Gonzalez | Carrito autopropulsado aplicable como carro de supermercado y similare. |
| DE10229270A1 (de) * | 2002-06-28 | 2004-01-15 | Sram Deutschland Gmbh | Golf-Handwagen mit elektrischem Antrieb |
| EP1459957B1 (de) * | 2003-03-21 | 2005-11-30 | HAUCK GmbH & Co. KG | Kinderwagen |
| KR200348254Y1 (ko) * | 2004-01-19 | 2004-04-28 | 윤상현 | 전동구동식 유모차 |
| EP1735200B1 (en) * | 2004-04-13 | 2011-01-19 | Graco Children's Products Inc. | Foldable stroller |
| US7490684B2 (en) * | 2006-08-24 | 2009-02-17 | Seymour Craig A | Self-propelled infant stroller |
| JP4994925B2 (ja) * | 2007-04-09 | 2012-08-08 | コンビ株式会社 | ベビーカー |
| DE202007008851U1 (de) * | 2007-06-25 | 2008-10-30 | Brodda-Sikora, Ines | Akku-Kinderwagen |
| US8033348B1 (en) * | 2008-04-07 | 2011-10-11 | Hemin Parkhe | Self-propelled child stroller |
| CN101434251B (zh) * | 2008-11-27 | 2011-04-13 | 汪新民 | 多用途人力机基础部与推力杆和推拉带及其配套部件 |
| US7987933B1 (en) * | 2009-02-12 | 2011-08-02 | Mcclellan John L | Motorized stroller apparatus |
| CN101811513A (zh) * | 2009-02-24 | 2010-08-25 | 劳伦斯·彼得·伊韦尔森 | 运输装置 |
| DE102009044840A1 (de) * | 2009-12-09 | 2011-06-16 | Clean Mobile Ag | Mehrfachkinderwagen mit Sitzbereichen für mindestens zwei Kinder |
| DE202010016119U1 (de) * | 2010-12-03 | 2011-02-17 | Unique Product & Design Co., Ltd., Yung Kang City | Motorisierter Golftaschenwagen |
| DE202011102790U1 (de) * | 2011-04-28 | 2011-12-05 | Herbert Weber | Transportwagen für Kinder |
| CN103072615B (zh) * | 2012-02-16 | 2015-08-19 | 中山市隆成日用制品有限公司 | 童车感应式刹车系统 |
| CN202541615U (zh) * | 2012-03-15 | 2012-11-21 | 费心兰 | 手推车高脚椅两用童车 |
| DE102013216679A1 (de) * | 2013-08-22 | 2015-02-26 | Robert Bosch Gmbh | Kinderwagen |
| US9656682B2 (en) * | 2014-10-10 | 2017-05-23 | Eli Ahlemeier | Motorized stroller system and apparatus |
| KR101653406B1 (ko) * | 2014-12-01 | 2016-09-02 | (주)케이피엠 | 제동장치를 구비하는 유모차 |
| DE202016003937U1 (de) * | 2015-06-26 | 2016-09-02 | Endepro Gmbh | Kinderwagen mit einer Bremse |
| US9796402B1 (en) * | 2015-10-13 | 2017-10-24 | Michael Suarez | Electronic shopping cart |
| DE202015106061U1 (de) * | 2015-11-10 | 2017-02-13 | Nadine Sandmann | Elektrisches Antriebssystem für einen Transportwagen, insbesondere Kinderwagen und Transportwagen, insbesondere Kinderwagen mit einem elektrischen Antriebssystem |
| CN205239598U (zh) * | 2015-12-02 | 2016-05-18 | 昆山威凯儿童用品有限公司 | 婴儿推车的防盗机构 |
| JP6886840B2 (ja) * | 2017-02-28 | 2021-06-16 | ニューウェルブランズ・ジャパン合同会社 | 乳母車 |
| DE202017104166U1 (de) * | 2017-07-12 | 2018-10-15 | Cybex Gmbh | Kinderwagengestell und Kinderwagen |
| DE102018202711A1 (de) * | 2018-02-22 | 2019-08-22 | Robert Bosch Gmbh | Transportvorrichtung sowie Verfahren |
| US10763767B2 (en) * | 2018-08-14 | 2020-09-01 | Joseph A. French | Direct shaft power generation and monitoring system |
| DE202018105345U1 (de) | 2018-09-18 | 2019-12-19 | Cybex Gmbh | Kinderwagengestell und Kinderwagen |
-
2018
- 2018-09-18 DE DE202018105345.0U patent/DE202018105345U1/de active Active
-
2019
- 2019-09-10 EP EP19772996.5A patent/EP3853100A1/de active Pending
- 2019-09-10 WO PCT/EP2019/074039 patent/WO2020058029A1/de unknown
- 2019-09-10 JP JP2021514583A patent/JP7439060B2/ja active Active
- 2019-09-10 CN CN201980070081.3A patent/CN112912300B/zh active Active
- 2019-09-10 US US17/277,656 patent/US11485398B2/en active Active
- 2019-09-10 KR KR1020217011193A patent/KR20210060553A/ko active Search and Examination
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010534156A (ja) | 2007-02-12 | 2010-11-04 | ステラクライム リミテッド ライアビリティ カンパニー | 階段昇降車両 |
| WO2015053086A1 (ja) | 2013-10-11 | 2015-04-16 | 株式会社村田製作所 | 手押し車 |
| JP2016005951A (ja) | 2014-06-16 | 2016-01-14 | サイベックス ゲーエムベーハー | ベビーカーフレーム及びベビーカー |
| WO2017042959A1 (ja) | 2015-09-11 | 2017-03-16 | コンビ株式会社 | 乳母車 |
| CN205854248U (zh) | 2016-06-20 | 2017-01-04 | 好孩子儿童用品有限公司 | 一种助力儿童推车 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3853100A1 (de) | 2021-07-28 |
| DE202018105345U1 (de) | 2019-12-19 |
| CN112912300B (zh) | 2023-11-03 |
| WO2020058029A1 (de) | 2020-03-26 |
| CN112912300A (zh) | 2021-06-04 |
| JP2022500302A (ja) | 2022-01-04 |
| US20210347402A1 (en) | 2021-11-11 |
| KR20210060553A (ko) | 2021-05-26 |
| US11485398B2 (en) | 2022-11-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7295086B2 (ja) | ベビーカーフレームおよびベビーカー | |
| JP7439060B2 (ja) | ベビーカーフレーム及びベビーカー | |
| KR101408162B1 (ko) | 전자동 유모차 | |
| CN109199802B (zh) | 辅助行走车及其控制方法 | |
| KR101382632B1 (ko) | 접이식 전동 보행 보조차 | |
| KR101658802B1 (ko) | 접이식 적재기구 및 이를 이용한 전동 캐리어 | |
| KR101102845B1 (ko) | 노약자용 전동 간이 이동 장치 | |
| KR20110125378A (ko) | 전자식 주차 브레이크 시스템 | |
| US20220274638A1 (en) | Pram | |
| JP5770348B1 (ja) | 歩行補助装置 | |
| KR101982323B1 (ko) | 휠체어용 브레이크 유닛 | |
| KR101382633B1 (ko) | 전동식 보행 보조차 | |
| KR20130107495A (ko) | 경사면 이동에 적합한 전동 실버카 | |
| KR101485300B1 (ko) | 전동 카트 | |
| JP2003320935A (ja) | 電動車 | |
| JPH11146508A (ja) | 補助電動動力機構付き移動装置 | |
| JP2006141646A (ja) | 車椅子用電動ユニット及びこれを用いた電動車椅子 | |
| CN114340973B (zh) | 童车 | |
| WO2016031262A1 (ja) | 歩行補助装置、歩行補助装置を制御するための方法、および、コンピュータに歩行補助装置を制御させるためのプログラム | |
| JP2014064619A (ja) | 電動車椅子 | |
| JP2011138417A (ja) | 操作機構及び生活支援用具 | |
| CN209719269U (zh) | 一种电动单车刹车辅助装置 | |
| JP2023099903A (ja) | 歩行器兼電動車椅子 | |
| JP2000237244A (ja) | 介助補助機構付き車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230322 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230621 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240116 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240214 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7439060 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |