JP7416010B2 - 提示制御装置、提示制御プログラム、自動運転制御装置および自動運転制御プログラム - Google Patents
提示制御装置、提示制御プログラム、自動運転制御装置および自動運転制御プログラム Download PDFInfo
- Publication number
- JP7416010B2 JP7416010B2 JP2021072095A JP2021072095A JP7416010B2 JP 7416010 B2 JP7416010 B2 JP 7416010B2 JP 2021072095 A JP2021072095 A JP 2021072095A JP 2021072095 A JP2021072095 A JP 2021072095A JP 7416010 B2 JP7416010 B2 JP 7416010B2
- Authority
- JP
- Japan
- Prior art keywords
- state
- monitoring
- level
- driver
- automatic driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007704 transition Effects 0.000 claims description 259
- 238000012544 monitoring process Methods 0.000 claims description 183
- 230000008859 change Effects 0.000 claims description 77
- 238000000034 method Methods 0.000 claims description 67
- 230000008569 process Effects 0.000 claims description 56
- 230000002093 peripheral effect Effects 0.000 claims description 10
- 230000001133 acceleration Effects 0.000 claims description 7
- 230000008030 elimination Effects 0.000 claims description 4
- 238000003379 elimination reaction Methods 0.000 claims description 4
- 230000008034 disappearance Effects 0.000 claims description 2
- 230000007423 decrease Effects 0.000 claims 2
- 239000000725 suspension Substances 0.000 claims 2
- 230000010391 action planning Effects 0.000 description 25
- 238000004891 communication Methods 0.000 description 21
- 238000001514 detection method Methods 0.000 description 19
- 238000005259 measurement Methods 0.000 description 17
- 230000015654 memory Effects 0.000 description 15
- 238000012545 processing Methods 0.000 description 14
- 230000006870 function Effects 0.000 description 12
- 230000009471 action Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000006399 behavior Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 238000011084 recovery Methods 0.000 description 4
- 230000036626 alertness Effects 0.000 description 3
- 238000013508 migration Methods 0.000 description 3
- 230000005012 migration Effects 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 210000000744 eyelid Anatomy 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000007562 laser obscuration time method Methods 0.000 description 2
- 230000007958 sleep Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 206010062519 Poor quality sleep Diseases 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0057—Estimation of the time available or required for the handover
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0059—Estimation of the risk associated with autonomous or manual driving, e.g. situation too complex, sensor failure or driver incapacity
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/223—Posture, e.g. hand, foot, or seat position, turned or inclined
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
Description
自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および自動運転の実行中にドライバによる周辺監視の中断を禁止する監視要状態との間の遷移と、監視要状態において、ドライバによるステアリングハンドルの把持中断を許可できるか否かと、を判断する判断部(120)と、
監視不要状態から把持中断を許可できる監視要状態に直接的に遷移する場合には、ドライバに対するステアリングハンドルの把持要求を実行した後に、監視要状態における把持中断を許可する許可状態制御部(140)と、
を備える。
命令は、
自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および自動運転の実行中にドライバによる周辺監視の中断を禁止する監視要状態との間の遷移と、監視要状態において、ドライバによるステアリングハンドルの把持中断を許可できるか否かと、を判断させる判断プロセス(S201)と、
監視不要状態から把持中断を許可できる監視要状態に直接的に遷移する場合には、ドライバに対するステアリングハンドルの把持要求を実行させた後に、監視要状態における把持中断を許可させる許可状態制御プロセス(S204,S207)と、
を含む。
自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および自動運転の実行中にドライバによる周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御部(74a)と、
監視要状態において、ドライバによるステアリングハンドルの把持中断を許可するか否かを判断する把持判断部(74b)と、
監視不要状態から把持中断を許可できる監視要状態への直接的な遷移が実行される場合に、ドライバに対するステアリングハンドルの把持要求を出力する要求出力部(74c)と、を備える。
命令は、
自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および自動運転の実行中にドライバによる周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御プロセス(S601)と、
監視要状態において、ドライバによるステアリングハンドルの把持中断を許可できるか否かを判断する把持判断プロセス(S602)と、
監視不要状態から把持中断を許可できる監視要状態への直接的な遷移が実行される場合に、ドライバに対するステアリングハンドルの把持要求を出力する要求出力プロセス(S604)と、
を含む。
第1実施形態の提示制御装置について、図1~図12を参照しながら説明する。第1実施形態の提示制御装置は、車両Aに搭載されたHCU(Human Machine Interface Control Unit)100により提供される。HCU100は、車両Aにおいて用いられるHMI(Human Machine Interface)システムを、複数の表示デバイス、オーディオ装置24および操作デバイス26等と共に構成している。HMIシステムは、車両Aの乗員(例えばドライバ等)による操作を受け付ける入力インターフェース機能と、ドライバへ向けて情報を提示する出力インターフェース機能とを備えている。HCU100は、ロケータ30、周辺監視センサ40、車載通信器50、第1自動運転ECU60、第2自動運転ECU70、DSM27および車両制御ECU80と、通信バス99等を介して接続されている。
第2実施形態では、第1実施形態におけるHCU100の変形例について説明する。第2実施形態において、提示情報調整部140は、自動運転レベル3からレベル2への遷移理由が周辺監視不要区間からの退出である場合には、ハンズオン通知を中止する。この場合、図11のフローのS202において、提示情報調整部140が、遷移理由が渋滞解消であると判定した場合と、周辺監視不要区間からの退出であると判定した場合とで、進むステップが逆になる。
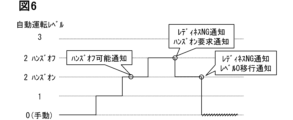
第3実施形態では、第1実施形態におけるHCU100の変形例について説明する。第3実施形態のHCU100は、自動運転レベル3への遷移が許容される場合、自動運転レベル2のハンズオフ状態にてドライバにハンズオンを要求したうえで、自動運転レベル3へと遷移する。
第4実施形態では、第1実施形態におけるHCU100の変形例について説明する。第4実施形態のHCU100は、自動運転レベル4からレベル3以下への遷移が許容される場合、自動運転レベル2のハンズオフ状態にてドライバにハンズオンを要求したうえで、自動運転レベル3へと遷移する。
第5実施形態では、第1実施形態における自動運転制御システム1の変形例について説明する。
自動運転を実行可能な車両(A)において前記自動運転を制御する制御システムであって、
前記ドライバの前記自動運転に対する準備度合の高さが許容レベルに到達しているか否かを判断する準備度合判断部(130)と、
前記自動運転に関連する関連制御を実行し、前記準備度合の高さが前記許容レベルに到達していると判定された場合には、前記許容レベルに到達していないと判定された場合よりも、前記関連制御の慎重度を高める制御実行部(64,74,140)と、
を備える制御システム。
自動運転を実行可能な車両(A)において前記自動運転を制御するために、記憶媒体(101)に格納され、プロセッサ(102)に実行させる命令を含む制御プログラムであって、
前記命令は、
前記ドライバの前記自動運転に対する準備度合の高さが許容レベルに到達しているか否かを判断させる判断プロセス(S501)と、
前記自動運転に関連する関連制御を実行させ、前記準備度合の高さが前記許容レベルに到達していると判定された場合には、前記許容レベルに到達していないと判定された場合よりも、前記関連制御の慎重度を高める制御実行プロセス(S502,S503)と、
を含む提示制御プログラム。
第6実施形態では、第1実施形態における自動運転制御システム1の変形例について説明する。
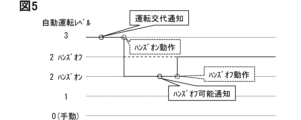
運転交代シーン1(図5参照)は、周辺監視不要区間(またはADエリア)からの車両Aの退出が予定された運転交代のシーンである。運転交代シーン1では、ハンズオフ状態への遷移途中に、ハンズオン状態が一時的に設定される。即ち、自動運転レベル3からレベル2のハンズオフ状態への遷移が実行されるに際して、このハンズオフ状態が一時的に不許可となる。
運転交代シーン2(図5参照)は、ADエリア内にて自車周囲の渋滞解消が予定された運転交代のシーンである。運転交代シーン2でも、運転交代シーン1と同様に、ハンズオフ状態への遷移途中に、ハンズオン状態が一時的に設定される。即ち、把持判断部74bは、運転交代通知の実施後に、レベル2のハンズオン状態に自動運転制御を移行させる。さらに、把持判断部74bは、ハンズオン可能通知の実施後に、レベル2のハンズオフ状態に自動運転制御を移行させる。
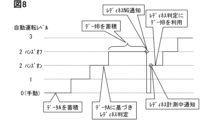
運転交代シーン3(図24参照)は、ADエリア内にて渋滞が継続しつつも、運転交代が必要となったシーンである。渋滞中を走行するための自動運転レベル3の実施中において、例えば自車と同一レーンを走行する後方車両が存在しなくなった場合または周辺監視センサ40によって後方車両が不検知となった場合、状態制御部74aは、渋滞時レベル3の中断条件を成立させる。この場合、上述の如く、滞中を走行するための自動運転レベル3(以下、渋滞時レベル3)から自動運転レベル2のハンズオン状態への遷移が段階的に実施される。
車両(A)において自動運転を実行可能な自動運転制御装置であって、
前記自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御部(74a)と、
前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可するか否かを判断する把持判断部(74b)と、を備え、
前記把持判断部は、前記監視不要状態から前記把持中断を許可できる前記監視要状態への遷移が実行される場合に、前記把持中断を一時的に不許可にする自動運転制御装置。
車両(A)において自動運転を実行可能にするために、記憶媒体(71)に格納され、プロセッサ(72)に実行させる命令を含む自動運転制御プログラムであって、
前記命令は、
前記自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御プロセス(S601)と、
前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可できるか否かを判断する把持判断プロセス(S602,S604,S607)と、を含み、
前記把持判断プロセスでは、前記監視不要状態から前記把持中断を許可できる前記監視要状態への遷移が実行される場合に、前記把持中断が一時的に不許可とされる自動運転制御プログラム。
第7実施形態では、第6実施形態における自動運転制御システム1の変形例について説明する。
この明細書における開示は、例示された実施形態に制限されない。開示は、例示された実施形態と、それらに基づく当業者による変形態様を包含する。例えば、開示は、実施形態において示された部品および/または要素の組み合わせに限定されない。開示は、多様な組み合わせによって実施可能である。開示は、実施形態に追加可能な追加的な部分をもつことができる。開示は、実施形態の部品および/または要素が省略されたものを包含する。開示は、ひとつの実施形態と他の実施形態との間における部品および/または要素の置き換え、または組み合わせを包含する。開示される技術的範囲は、実施形態の記載に限定されない。開示されるいくつかの技術的範囲は、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味および範囲内での全ての変更を含むものと解されるべきである。
[技術的特徴29]
車両(A)において自動運転を実行可能な自動運転制御装置であって、
前記自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御部(74a)と、
前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可するか否かを判断する把持判断部(74b)と、を備え、
前記把持判断部は、渋滞中において前記状態制御部が前記監視不要状態から前記監視要状態へと遷移させる場合、前記把持中断を許可できる状態に移行させた後、前記把持中断を許可しない状態へと移行させる自動運転制御装置。
[技術的特徴30]
車両(A)において自動運転を実行可能にするために、記憶媒体(71)に格納され、プロセッサ(72)に実行させる命令を含む自動運転制御プログラムであって、
前記命令は、
前記自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御プロセス(S601)と、
前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可できるか否かを判断する把持判断プロセス(S602)と、を含み、
前記監視不要状態から前記監視要状態への遷移が渋滞中において実行される場合、前記把持判断プロセスでは、前記把持中断を許可できる状態に移行させた後、前記把持中断を許可しない状態へと移行させる遷移の実行を決定する自動運転制御プログラム。
[技術的特徴31]
車両(A)において自動運転を実行可能な自動運転制御装置であって、
前記自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御部(74a)と、
前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可するか否かを判断する把持判断部(74b)と、を備え、
前記状態制御部および前記把持判断部は、前記監視不要状態から手動運転への遷移の実行後、所定時間以内に前記把持中断を許可できると判断した場合、前記把持中断を許可しない前記監視要状態への移行を省略し、前記手動運転から前記把持中断を許可できる前記監視要状態への移行を実行する自動運転制御装置。
[技術的特徴32]
車両(A)において自動運転を実行可能にするために、記憶媒体(71)に格納され、プロセッサ(72)に実行させる命令を含む自動運転制御プログラムであって、
前記命令は、
前記自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御プロセスと、
前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可できるか否かを判断する把持判断プロセスと、
前記状態制御プロセスにより前記監視要状態から手動運転への遷移の実行後、所定時間以内に前記把持判断プロセスにより前記把持中断を許可できると判断した場合、前記把持中断を許可しない前記監視要状態への移行を省略し、前記手動運転から前記把持中断を許可できる前記監視要状態への移行を実行する状態復帰プロセスと、
を含む自動運転制御プログラム。
Claims (28)
- 自動運転を実行可能な車両(A)のドライバに対する情報の提示を制御する提示制御装置であって、
前記自動運転の実行中に前記ドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移と、前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可できるか否かと、を判断する判断部(120)と、
前記監視不要状態から前記把持中断を許可できる前記監視要状態に直接的に遷移する場合には、前記ドライバに対する前記ステアリングハンドルの把持要求を実行した後に、前記監視要状態における前記把持中断を許可する許可状態制御部(140)と、
を備える提示制御装置。 - 前記許可状態制御部は、前記把持中断を許可できる前記監視要状態から前記監視不要状態へと遷移する場合には、前記把持要求を中止する請求項1に記載の提示制御装置。
- 前記許可状態制御部は、前記監視不要状態から前記監視要状態への遷移理由に基づいて、前記把持要求を実行するか否かを決定する請求項1または請求項2に記載の提示制御装置。
- 前記許可状態制御部は、取得する前記遷移理由に、渋滞解消および予め設定された周辺監視の中断が許容される走行エリアからの退出のいずれかを含み、前記遷移理由が渋滞解消である場合には、前記把持要求を中止する請求項3に記載の提示制御装置。
- 前記許可状態制御部は、前記遷移理由が渋滞解消とは異なる理由であり、渋滞が継続する場合には、前記監視不要状態から前記把持中断を許可できる前記監視要状態へと遷移した後に、前記把持要求を実行する請求項3または請求項4に記載の提示制御装置。
- 前記許可状態制御部は、前記車両の後方を走行する後方車両の消失が前記遷移理由である場合、前記監視不要状態から前記把持中断を許可できる前記監視要状態へと遷移した後に、前記把持要求を実行する請求項5に記載の提示制御装置。
- 前記許可状態制御部は、取得する前記遷移理由に、渋滞解消および予め設定された周辺監視の中断が許容される走行エリアからの退出のいずれかを含み、前記遷移理由が前記走行エリアからの退出である場合には、前記把持要求を中止する請求項3に記載の提示制御装置。
- 前記許可状態制御部は、前記把持中断を許可する前記監視要状態が所定時間以上継続した場合には、前記把持中断を許可できる状態が継続していても、前記把持要求を実行する請求項1から請求項7のいずれか1項に記載の提示制御装置。
- 前記許可状態制御部は、前記監視不要状態から前記把持中断を許可できる前記監視要状態への直接的な遷移が行われる場合に、前記ドライバに対し腕位置の変更を要求する動作要求を実行する請求項1から請求項8のいずれか1項に記載の提示制御装置。
- 前記許可状態制御部は、前記監視不要状態から前記把持中断を許可できる前記監視要状態への直接的な遷移が行われる場合に、前記周辺監視の実施を前記ドライバに対し要求する監視要求と、前記把持中断の状態下での理想姿勢をとることを前記ドライバに対し要求する姿勢要求とを実行する請求項1から請求項8のいずれか1項に記載の提示制御装置。
- 前記許可状態制御部は、前記監視不要状態から手動運転状態への遷移後、前記把持中断を許可できる前記監視要状態での前記自動運転が可能となった場合には、前記把持中断を許可しない前記監視要状態の経由を省略する請求項1から請求項10のいずれか1項に記載の提示制御装置。
- 前記許可状態制御部は、前記ドライバが前記把持要求に従わなかった場合であっても、前記監視要状態における前記把持中断を許可する請求項1から請求項11のいずれか1項に記載の提示制御装置。
- 前記ドライバの前記自動運転に対する準備度合の高さを判断する準備度合判断部(130)を備え、
前記判断部は、前記自動運転の状態を変更可能であって、前記自動運転の状態の変更前に、前記自動運転の状態の変更が許可されるか否かを、前記準備度合の高さに基づいて判断する請求項1から請求項12のいずれか1項に記載の提示制御装置。 - 前記判断部は、前記監視不要状態から前記監視要状態へと遷移した後で前記準備度合が低下しても、前記監視要状態を継続させる請求項13に記載の提示制御装置。
- 前記準備度合判断部は、前回の前記自動運転の状態から手動運転へと遷移した後に今回の前記自動運転の状態に遷移した場合において、前回の前記準備度合の判断において取得したデータについて、今回利用可能か否かを判定し、利用可能であると判定した場合には、前回の前記データを今回の前記準備度合の判断に利用する請求項13または請求項14に記載の提示制御装置。
- 前記準備度合判断部は、前回の前記データについて、今回利用不可能であると判定した場合には、前記データを再取得して前記準備度合を判断し、
前記許可状態制御部は、前記データを取得中であることを通知する請求項15に記載の提示制御装置。 - 前記判断部は、前記ドライバに前記ステアリングハンドルの操作時間を確保させるべき確保条件が成立しているか否かを判断し、前記確保条件が成立している場合において前記自動運転の状態の変更を許可する前記準備度合の高さの閾値を、前記確保条件が不成立である場合よりも高く設定する請求項13から請求項16のいずれか1項に記載の提示制御装置。
- 前記判断部は、前記監視不要状態のうち自動運転レベル4に相当するレベル4モードから、前記監視不要状態のうち自動運転レベル3に相当するレベル3モード、前記把持中断を許可する前記監視要状態または手動運転状態への遷移であるレベル低下遷移において、前記レベル4モードの直後に前記把持中断を禁止した前記監視要状態を経由させる判断を下し、
前記許可状態制御部は、前記レベル低下遷移での前記把持中断を禁止した前記監視要状態の経由において、前記把持要求を実行する請求項1から請求項17のいずれか1項に記載の提示制御装置。 - 前記判断部は、前記ドライバに前記ステアリングハンドルの操作時間を確保させるべき確保条件が成立していないと判断した場合に、前記レベル4モードの直後に前記把持中断を禁止した前記監視要状態の経由を中止させる中止判断を下し、
前記許可状態制御部は、前記中止判断が下された場合には、前記把持要求の実行を中止する請求項18に記載の提示制御装置。 - 前記判断部は、前記確保条件が成立していないと判断した場合であっても、前記自動運転により前記車両の操舵または加減速のいずれか一方を制御する前記監視要状態または前記手動運転状態に遷移する前記レベル低下遷移においては、前記把持中断を禁止した前記監視要状態を経由させる判断を下す請求項19に記載の提示制御装置。
- 前記判断部は、前記レベル低下遷移における前記レベル4モードの解除理由に応じて、状態の遷移先を変更する請求項18から請求項20のいずれか1項に記載の提示制御装置。
- 前記判断部は、前記監視不要状態から前記監視要状態および手動運転状態のいずれかへの遷移において、前記監視不要状態の解除理由に応じて、状態の遷移先を変更する請求項1から請求項20のいずれか1項に記載の提示制御装置。
- 自動運転を実行可能な車両(A)のドライバに対する情報の提示を制御するために、記憶媒体(101)に格納され、プロセッサ(102)に実行させる命令を含む提示制御プログラムであって、
前記命令は、
前記自動運転の実行中に前記ドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移と、前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可できるか否かと、を判断させる判断プロセス(S201)と、
前記監視不要状態から前記把持中断を許可できる前記監視要状態に直接的に遷移する場合には、前記ドライバに対する前記ステアリングハンドルの把持要求を実行させた後に、前記監視要状態における前記把持中断を許可させる許可状態制御プロセス(S204,S207)と、
を含む提示制御プログラム。 - 車両(A)において自動運転を実行可能な自動運転制御装置であって、
前記自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御部(74a)と、
前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可するか否かを判断する把持判断部(74b)と、
前記監視不要状態から前記把持中断を許可できる前記監視要状態への直接的な遷移が実行される場合に、前記ドライバに対する前記ステアリングハンドルの把持要求を出力する要求出力部(74c)と、を備える自動運転制御装置。 - 前記把持判断部は、前記要求出力部による前記把持要求の出力後に、前記監視要状態における前記把持中断を許可する請求項24に記載の自動運転制御装置。
- 前記把持判断部は、渋滞解消によって前記監視不要状態から前記監視要状態への遷移を実行する場合、前記監視不要状態から前記把持中断を許可しない前記監視要状態へと一時的に移行させた後、前記把持中断を許可できる前記監視要状態へと移行させる請求項24または請求項25に記載の自動運転制御装置。
- 前記把持判断部は、渋滞解消とは異なる理由によって前記監視不要状態から前記監視要状態への遷移を実行する場合、前記監視不要状態から前記把持中断を許可できる前記監視要状態へと移行させた後、前記把持中断を許可しない前記監視要状態へと移行させる請求項24から請求項26のいずれか1項に記載の自動運転制御装置。
- 車両(A)において自動運転を実行可能にするために、記憶媒体(71)に格納され、プロセッサ(72)に実行させる命令を含む自動運転制御プログラムであって、
前記命令は、
前記自動運転の実行中にドライバによる周辺監視の中断を許可する監視不要状態および前記自動運転の実行中に前記ドライバによる前記周辺監視の中断を禁止する監視要状態との間の遷移を実行する状態制御プロセス(S601)と、
前記監視要状態において、前記ドライバによるステアリングハンドルの把持中断を許可できるか否かを判断する把持判断プロセス(S602)と、
前記監視不要状態から前記把持中断を許可できる前記監視要状態への直接的な遷移が実行される場合に、前記ドライバに対する前記ステアリングハンドルの把持要求を出力する要求出力プロセス(S604)と、
を含む自動運転制御プログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202280029621.5A CN117203112A (zh) | 2020-06-10 | 2022-03-28 | 提示控制装置、提示控制程序、自动驾驶控制装置以及自动驾驶控制程序 |
| PCT/JP2022/014948 WO2022224721A1 (ja) | 2020-06-10 | 2022-03-28 | 提示制御装置、提示制御プログラム、自動運転制御装置および自動運転制御プログラム |
| DE112022002292.2T DE112022002292T5 (de) | 2020-06-10 | 2022-03-28 | Präsentationssteuerungsvorrichtung, Präsentationssteuerungsprogramm, Autonomes-Fahren-Steuerungsvorrichtung und Autonomes-Fahren-Steuerungsprogramm |
| US18/487,936 US20240043031A1 (en) | 2020-06-10 | 2023-10-16 | Presentation control device, autonomous driving control device, and storage mediums |
| JP2023221098A JP2024026575A (ja) | 2020-06-10 | 2023-12-27 | 自動運転制御装置および自動運転制御プログラム |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020101215 | 2020-06-10 | ||
| JP2020101215 | 2020-06-10 | ||
| JP2021030064 | 2021-02-26 | ||
| JP2021030064 | 2021-02-26 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023221098A Division JP2024026575A (ja) | 2020-06-10 | 2023-12-27 | 自動運転制御装置および自動運転制御プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022008054A JP2022008054A (ja) | 2022-01-13 |
| JP2022008054A5 JP2022008054A5 (ja) | 2023-04-06 |
| JP7416010B2 true JP7416010B2 (ja) | 2024-01-17 |
Family
ID=80110109
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021072095A Active JP7416010B2 (ja) | 2020-06-10 | 2021-04-21 | 提示制御装置、提示制御プログラム、自動運転制御装置および自動運転制御プログラム |
| JP2023221098A Pending JP2024026575A (ja) | 2020-06-10 | 2023-12-27 | 自動運転制御装置および自動運転制御プログラム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023221098A Pending JP2024026575A (ja) | 2020-06-10 | 2023-12-27 | 自動運転制御装置および自動運転制御プログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240043031A1 (ja) |
| JP (2) | JP7416010B2 (ja) |
| CN (1) | CN117203112A (ja) |
| DE (1) | DE112022002292T5 (ja) |
| WO (1) | WO2022224721A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7416010B2 (ja) * | 2020-06-10 | 2024-01-17 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置および自動運転制御プログラム |
| US20230219578A1 (en) * | 2022-01-07 | 2023-07-13 | Ford Global Technologies, Llc | Vehicle occupant classification using radar point cloud |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019006280A (ja) | 2017-06-26 | 2019-01-17 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| WO2019017216A1 (ja) | 2017-07-21 | 2019-01-24 | ソニーセミコンダクタソリューションズ株式会社 | 車両制御装置及び車両制御方法 |
| JP2019156356A (ja) | 2018-03-16 | 2019-09-19 | 本田技研工業株式会社 | 車両用制御装置及び車両 |
| JP2020170402A (ja) | 2019-04-04 | 2020-10-15 | トヨタ自動車株式会社 | 車両制御装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6831190B2 (ja) | 2016-08-15 | 2021-02-17 | トヨタ自動車株式会社 | 自動運転車両の制御システム及び制御方法 |
| JP6540663B2 (ja) * | 2016-11-18 | 2019-07-10 | トヨタ自動車株式会社 | 車両システム |
| JP2019109590A (ja) * | 2017-12-15 | 2019-07-04 | 日本精機株式会社 | 表示装置、表示方法及び表示プログラム |
| JP2020101215A (ja) | 2018-12-20 | 2020-07-02 | ジヤトコ株式会社 | バルブ装置 |
| JP7047821B2 (ja) * | 2019-07-18 | 2022-04-05 | トヨタ自動車株式会社 | 運転支援装置 |
| JP7416010B2 (ja) * | 2020-06-10 | 2024-01-17 | 株式会社デンソー | 提示制御装置、提示制御プログラム、自動運転制御装置および自動運転制御プログラム |
| JP6836676B2 (ja) | 2020-06-29 | 2021-03-03 | 株式会社カプコン | ゲーム装置、及びゲームプログラム |
| JP2021072095A (ja) | 2020-07-20 | 2021-05-06 | 株式会社プレシジョン | 薬剤例検索装置、薬剤例検索方法及び薬剤例検索プログラム |
-
2021
- 2021-04-21 JP JP2021072095A patent/JP7416010B2/ja active Active
-
2022
- 2022-03-28 DE DE112022002292.2T patent/DE112022002292T5/de active Pending
- 2022-03-28 CN CN202280029621.5A patent/CN117203112A/zh active Pending
- 2022-03-28 WO PCT/JP2022/014948 patent/WO2022224721A1/ja active Application Filing
-
2023
- 2023-10-16 US US18/487,936 patent/US20240043031A1/en active Pending
- 2023-12-27 JP JP2023221098A patent/JP2024026575A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019006280A (ja) | 2017-06-26 | 2019-01-17 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| WO2019017216A1 (ja) | 2017-07-21 | 2019-01-24 | ソニーセミコンダクタソリューションズ株式会社 | 車両制御装置及び車両制御方法 |
| JP2019156356A (ja) | 2018-03-16 | 2019-09-19 | 本田技研工業株式会社 | 車両用制御装置及び車両 |
| JP2020170402A (ja) | 2019-04-04 | 2020-10-15 | トヨタ自動車株式会社 | 車両制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024026575A (ja) | 2024-02-28 |
| JP2022008054A (ja) | 2022-01-13 |
| CN117203112A (zh) | 2023-12-08 |
| WO2022224721A1 (ja) | 2022-10-27 |
| US20240043031A1 (en) | 2024-02-08 |
| DE112022002292T5 (de) | 2024-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20200377126A1 (en) | Information output control device and information output control method | |
| JP2024026575A (ja) | 自動運転制御装置および自動運転制御プログラム | |
| US20230013492A1 (en) | Presentation control device and non-transitory computer readable storage medium | |
| JP7259832B2 (ja) | 運転制御装置、hmi制御装置、運転制御プログラム、およびhmi制御プログラム | |
| JP7363833B2 (ja) | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム | |
| WO2022202032A1 (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| JP7331875B2 (ja) | 提示制御装置および提示制御プログラム | |
| JP7338653B2 (ja) | 提示制御装置及び提示制御プログラム | |
| WO2021199964A1 (ja) | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム | |
| JP7384126B2 (ja) | 車両用渋滞判断装置、および車両用表示制御装置 | |
| JP7283491B2 (ja) | 提示制御装置および提示制御プログラム | |
| JP7484689B2 (ja) | 制御システム、制御装置および制御プログラム | |
| WO2022209459A1 (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| WO2021200121A1 (ja) | 提示制御装置および提示制御プログラム | |
| WO2023085064A1 (ja) | 車両制御装置 | |
| US20230311950A1 (en) | Automated driving control device and storage medium storing automated driving control program | |
| US20240083455A1 (en) | Function control device, function control program, automated driving control device, and storage medium | |
| WO2023166623A1 (ja) | 運転支援方法及び運転支援装置 | |
| WO2022244548A1 (ja) | 自動運転制御装置、及び自動運転制御プログラム | |
| US20240010221A1 (en) | Vehicle presentation control device, vehicle presentation control system, and vehicle presentation control method | |
| JP2021183477A (ja) | 制御システム、制御装置および制御プログラム | |
| JP2022115055A (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| JP2022155463A (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| JP2022151544A (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| CN117136157A (zh) | 自动驾驶控制装置、自动驾驶控制程序、提示控制装置以及提示控制程序 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230328 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230822 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231218 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7416010 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |