JP7363528B2 - モータの磁石温度推定装置、及びそれを備えるハイブリッド車 - Google Patents
モータの磁石温度推定装置、及びそれを備えるハイブリッド車 Download PDFInfo
- Publication number
- JP7363528B2 JP7363528B2 JP2020012002A JP2020012002A JP7363528B2 JP 7363528 B2 JP7363528 B2 JP 7363528B2 JP 2020012002 A JP2020012002 A JP 2020012002A JP 2020012002 A JP2020012002 A JP 2020012002A JP 7363528 B2 JP7363528 B2 JP 7363528B2
- Authority
- JP
- Japan
- Prior art keywords
- magnet
- motor
- temperature
- induced voltage
- rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/60—Controlling or determining the temperature of the motor or of the drive
- H02P29/66—Controlling or determining the temperature of the rotor
- H02P29/662—Controlling or determining the temperature of the rotor the rotor having permanent magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K13/00—Thermometers specially adapted for specific purposes
- G01K13/04—Thermometers specially adapted for specific purposes for measuring temperature of moving solid bodies
- G01K13/08—Thermometers specially adapted for specific purposes for measuring temperature of moving solid bodies in rotary movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/24—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K7/00—Measuring temperature based on the use of electric or magnetic elements directly sensitive to heat ; Power supply therefor, e.g. using thermoelectric elements
- G01K7/36—Measuring temperature based on the use of electric or magnetic elements directly sensitive to heat ; Power supply therefor, e.g. using thermoelectric elements using magnetic elements, e.g. magnets, coils
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K7/00—Measuring temperature based on the use of electric or magnetic elements directly sensitive to heat ; Power supply therefor, e.g. using thermoelectric elements
- G01K7/42—Circuits effecting compensation of thermal inertia; Circuits for predicting the stationary value of a temperature
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/60—Controlling or determining the temperature of the motor or of the drive
- H02P29/67—Controlling or determining the motor temperature by back electromotive force [back-EMF] evaluation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/308—Electric sensors
- B60Y2400/3086—Electric voltages sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K2205/00—Application of thermometers in motors, e.g. of a vehicle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K2217/00—Temperature measurement using electric or magnetic components already present in the system to be measured
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Ac Motors In General (AREA)
Description
D1≧D2/4 …(A)
の関係が満足される、としてもよい。
(1-1)全体構成
図1は、移動体としての自動車1の構成を例示する概略図である。図1に示す自動車1は、4輪のハイブリッド車である。ハイブリッド車としての自動車1は、駆動源として、モータ3と、このモータ3と協働するエンジン2と、を備える。エンジン2及びモータ3は、互いに協働することで、4つの車輪4F,4F,4R,4Rのうち、車体の後側に位置する駆動輪4R,4Rを回転駆動する。この回転駆動によって、自動車1が移動(走行)する。
エンジン2は、例えばガソリンを燃料にして燃焼を行う内燃機関である。エンジン2は、いわゆる4サイクルエンジンである。すなわち、本実施形態に係るエンジン2は、吸気、圧縮、膨張及び排気の各サイクルを繰り返すことで回転動力を発生させる。なお、エンジン2の種類及び形態は、本実施形態に示すものに限定されない。エンジン2は、ディーゼルエンジン等、様々な形態を取り得る。
D1≧D2/4 …(A)
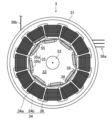
の関係が満足される。式(A)は、回転方向における空隙38の寸法の下限を規定する。また、図2Bに示す断面上で、回転方向における磁石35同士の間隔をD3とすると、
D3≧2×D1 …(B)
の関係が満足される。式(B)は、回転方向における空隙38の寸法の上限を規定する。
また、各空隙38は、回転方向において磁石35から離間するにつれて、径方向における寸法が短くなる。すなわち、各空隙38は、図2Bに例示するように先細に形成される。同図に示すように、各空隙38の先端部は、回転方向において互いに向かい合う。
自動車1は、該自動車1の走行をコントロールするために、前述したECU20、MCU21、TCU22、BCU23及びGCU24を備える。これらのユニットのうち、ECU20は、エンジン2の作動を主に制御するユニットである。MCU21は、モータ3の作動を主に制御するユニットである。TCU22は、第1クラッチ5、第2クラッチ7及び変速機8の作動を主に制御するユニットである。BCU23は、ブレーキ14の作動を主に制御するユニットである。GCU24は、ECU20、MCU21、TCU22及びBCU23と電気的に接続され、これらのユニットを総合的に制御する上位ユニットである。
MCU21は、磁石温度を判定するための制御ロジックとして、2種類の推定ロジックを単体で又は組み合わせて実行することができる。すなわち、MCU21は、「モータの磁石温度推定装置」を構成する。モータの磁石温度推定装置としてのMCU21の構成は、図4に示す通りである。
図5は、コイル36に生じる誘起電圧を例示するグラフである。図6は、空隙面積と電圧安定性及び機械強度との関係を例示するグラフである。ここでは、図5及び図6を参照しながら、第1の推定ロジックについて説明する。
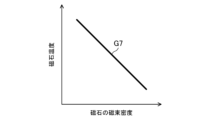
図7は、誘起電圧の高速フーリエ変換によって得られる振幅及び位相を例示する図である。図8は、磁石35の磁束密度と磁石温度との関係を例示するグラフである。ここでは、図7及び図8を参照しながら、第2の推定ロジックについて説明する。
f0=Np×Rm …(D)
f1=Nm×f0 …(E)
の関係が満足される。本実施形態の場合、Np=8であり、Nm=2である。したがって、最低次高調波は、基本波に対し2倍の周波数を有する2次高調波となる。なお、前記磁石35の代わりに分割磁石を用いた場合、Nmは4以上の整数となり得る。
図4は、モータの磁石温度推定装置の構成を例示するブロック図である。
推定方法選択部214は、ロータ33の回転数に基づいて、第1推定部215によって第1の推定ロジックを実行するか、或いは、第2推定部216によって第2の推定ロジックを実行するかを選択する。
第1推定部215は、第1の推定ロジックを実行するための機能ブロックとして、誘起電圧検出部21aと、平均電圧算出部21bと、磁束密度算出部21cと、磁石温度推定部21dと、制限量算出部21eと、を有する。
Bp=Vs/(Rm×Nc×c) …(G)
上式(F),(G)において、Rmはモータ回転数であり、Ncはコイル巻き数であり、cは定数である。モータ回転数Rmは、モータ回転センサ51によって都度検出される。コイル巻き数Ncと定数cは、メモリ212に予め記憶され、磁束密度Bn,Bpの算出に際して読み込まれる。磁束密度算出部21cによって推定された磁束密度Bn,Bpは、磁石温度推定部21dに入力される。
上式(H)において、定数Kは、メモリ212に予め記憶されており、パワー制限量の算出に際して読み込まれる。制限量算出部21eにより算出されたパワー制限量は、モータ制御部217に入力される。
第2推定部216は、第2の推定ロジックを実行するための機能ブロックとして、誘起電圧検出部21fと、FFT実行部21gと、温度ばらつき算出部21hと、磁束密度算出部21iと、磁石温度推定部21jと、制限量算出部21kと、を有する。
上式(I)に示すように、温度ばらつき算出部21hは、基本波の振幅Faと、最低次高調波の振幅Fbと、を加算することで最大振幅Fmaxを算出する。温度ばらつき算出部21hによって算出された最大振幅Fmaxは、磁束密度算出部21iに入力される。
引数Rm、Nc、cが意味するところは、上式(J),(G)と共通である。磁束密度算出部21cによって推定された磁束密度Bn,Bpは、磁石温度推定部21dに入力される。
上式(K)において、定数K2は、メモリ212に予め記憶されており、パワー制限量の算出に際して読み込まれる。制限量算出部21kにより算出されたパワー制限量は、モータ制御部217に入力される。
モータ制御部217は、第1推定部215又は第2推定部216によって算出されたパワー制限量に基づいた制御を実行する。具体的に、モータ制御部217は、パワー制限量とモータ3の要求出力とを比較し、要求出力がパワー制限量を上回っているか否かを判定する。
以下、MCU21が実行するモータ制御の具体例を説明する。図9は、第1及び第2推定制御に関連する処理を例示するフローチャートである。また、図10は、第1推定部215による磁石温度の推定手順を例示するフローチャートであり、図11は、第2推定部216による磁石温度の推定手順を例示するフローチャートであうr。
前記実施形態では、第1推定部215は、サーチコイル55の検出信号に基づいて第1の推定ロジックを実行するように構成されていたが、本開示は、その構成には限定されない。第1推定部215は、例えば、電圧センサ56の検出信号に基づいて第1の推定ロジックを実行することができる。
2 エンジン
21 MCU(コントローラ)
214 推定方法選択部
215 第1推定部
216 第2推定部
217 モータ制御部
21g FFT実行部
3 モータ
35 磁石
35a S磁石(第1磁石)
35b N磁石(第2磁石)
36 コイル
36u U相コイル
36v V相コイル
36w W相コイル
37 収容スペース
37a 支持面
37b 支持面
38 空隙
51 モータ回転センサ
55 サーチコイル(センサ)
56 電圧センサ(センサ)
57 バンドパスフィルタ
6 インバータ
Lc 中心軸線
Ts 所定期間
Claims (7)
- 磁石を有しかつ回転動力を出力するロータと、前記ロータに対しギャップを隔てて対向する複数のコイルを有するステータと、を備えるモータの磁石温度推定装置であって、
前記ロータの回転に応じて生じる誘起電圧を検出するセンサと、
前記ロータの回転数及び回転位置を検出するモータ回転センサと、
前記センサ及び前記モータ回転センサの検出信号が入力され、前記複数のコイルへの通電を通じて前記モータを制御するコントローラと、を備え、
前記ロータには、該ロータの回転方向において前記磁石と隣接する空隙が設けられ、
前記コントローラは、前記ロータの回転に伴って、前記磁石と、前記複数のコイルのうちの一のコイルと、がすれ違う際の所定期間にわたって検出される前記誘起電圧に基づいて、前記磁石の温度を推定し、
前記所定期間とは、前記磁石及び該磁石に隣接する他の磁石の中間に位置する部位と、前記一のコイルの中心軸線とが交わるタイミングを含まないように、該タイミングの前後に設定された期間であって、該期間に相当する電気角の範囲が、予め前記コントローラに記憶された期間であり、
前記コントローラは、前記電気角の範囲と、前記モータ回転センサの検出信号とに基づいて、前記所定期間にわたって前記誘起電圧を取得するとともに、該所定期間にわたって取得された前記誘起電圧の平均値に基づいて、前記磁石の温度を推定する
ことを特徴とするモータの磁石温度推定装置。 - 請求項1に記載されたモータの磁石温度推定装置において、
前記ロータの回転軸に垂直な断面上で、前記回転方向における前記空隙の寸法をD1とし、前記回転方向における前記コイルの直径をD2とすると、
D1≧D2/4 …(A)
の関係が満足される
ことを特徴とするモータの磁石温度推定装置。 - 請求項1又は2に記載されたモータの磁石温度推定装置において、
前記空隙は、前記回転方向に沿って延び、
前記空隙は、前記回転方向において前記磁石から離間するにつれて、前記ロータの径方向における寸法が短くなる
ことを特徴とするモータの磁石温度推定装置。 - 請求項3に記載されたモータの磁石温度推定装置において、
前記空隙は、前記ロータにおける前記磁石の収容スペースと連通し、
前記収容スペースは、前記径方向における両側から前記磁石を挟持する一対の支持面を有し、
前記一対の支持面のうちの少なくとも一方は、前記空隙の内周面と面一に繋がっている
ことを特徴とするモータの磁石温度推定装置。 - 請求項1から4のいずれか1項に記載されたモータの磁石温度推定装置において、
前記センサは、前記複数のコイルのうちの1つに重畳されるサーチコイルからなり、
前記サーチコイルは、前記モータを駆動するインバータとは独立した回路に接続され、
前記コントローラは、前記サーチコイルに生じる誘起電圧に基づいて前記磁石の温度を推定する
ことを特徴とするモータの磁石温度推定装置。 - 請求項1から5のいずれか1項に記載されたモータの磁石温度推定装置において、
前記コントローラは、前記磁石の温度の推定結果に基づいて、該磁石の温度状態を判定し、
前記コントローラは、前記温度状態が異常であると判定される場合、前記モータの出力を制限する
ことを特徴とするモータの磁石温度推定装置。 - 請求項1から6のいずれか1項に記載されたモータの磁石温度推定装置と、
前記モータと、
前記モータと協働するエンジンと、を備える
ことを特徴とするハイブリッド車。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020012002A JP7363528B2 (ja) | 2020-01-28 | 2020-01-28 | モータの磁石温度推定装置、及びそれを備えるハイブリッド車 |
| EP20215966.1A EP3859292B1 (en) | 2020-01-28 | 2020-12-21 | Magnet temperature estimating device for motor, hybrid vehicle provided with the same, and method of estimating magnet temperature |
| US17/131,064 US11581842B2 (en) | 2020-01-28 | 2020-12-22 | Magnet temperature estimating device for motor and hybrid vehicle provided with the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020012002A JP7363528B2 (ja) | 2020-01-28 | 2020-01-28 | モータの磁石温度推定装置、及びそれを備えるハイブリッド車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021118652A JP2021118652A (ja) | 2021-08-10 |
| JP7363528B2 true JP7363528B2 (ja) | 2023-10-18 |
Family
ID=73856115
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020012002A Active JP7363528B2 (ja) | 2020-01-28 | 2020-01-28 | モータの磁石温度推定装置、及びそれを備えるハイブリッド車 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11581842B2 (ja) |
| EP (1) | EP3859292B1 (ja) |
| JP (1) | JP7363528B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7140290B2 (ja) * | 2019-09-27 | 2022-09-21 | 株式会社アイシン | 車両用駆動装置 |
| DE102020129685A1 (de) * | 2020-11-11 | 2021-12-09 | Audi Aktiengesellschaft | System zum Betreiben eines Fahrzeugs |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002354721A (ja) | 2001-05-29 | 2002-12-06 | Hitachi Ltd | 永久磁石式回転子を備えた回転電機 |
| JP2006074887A (ja) | 2004-09-01 | 2006-03-16 | Suzuki Motor Corp | 電動機のロータ |
| JP2006304462A (ja) | 2005-04-19 | 2006-11-02 | Mitsubishi Heavy Ind Ltd | モータ駆動システム及び永久磁石モータ制御方法 |
| JP2009278733A (ja) | 2008-05-13 | 2009-11-26 | Asmo Co Ltd | モータ制御装置 |
| JP2013081312A (ja) | 2011-10-04 | 2013-05-02 | Nsk Ltd | 電動パワーステアリング用電動機及び電動パワーステアリング装置 |
| JP2017108568A (ja) | 2015-12-11 | 2017-06-15 | 株式会社エクセディ | モータ制御装置及びハイブリッド式車両の駆動制御装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4668721B2 (ja) * | 2004-11-30 | 2011-04-13 | 日立オートモティブシステムズ株式会社 | 永久磁石式回転電機 |
| DE102005062588A1 (de) * | 2005-12-27 | 2007-06-28 | Robert Bosch Gmbh | Verfahren zum Bestimmen der Magnettemperatur bei Synchronmaschinen |
| JP4853124B2 (ja) | 2006-06-15 | 2012-01-11 | 日産自動車株式会社 | 永久磁石型回転機の永久磁石の温度検出装置 |
| JP5616409B2 (ja) * | 2012-09-06 | 2014-10-29 | ファナック株式会社 | 永久磁石の不可逆減磁を防止する永久磁石同期電動機の制御装置及びそのような制御装置を備える制御システム |
| FR2995742B1 (fr) * | 2012-09-18 | 2015-10-16 | Renault Sas | Surveillance d'un moteur a aimants permanents |
| JP2014107956A (ja) * | 2012-11-28 | 2014-06-09 | Hitachi Automotive Systems Ltd | モータ、制御装置およびモータ駆動装置 |
| JP6158115B2 (ja) * | 2013-02-21 | 2017-07-05 | 株式会社東芝 | 磁石磁束量推定装置、異常減磁判定装置、同期電動機駆動装置および電動車両 |
| JP5984172B2 (ja) | 2013-04-11 | 2016-09-06 | 三菱電機株式会社 | 電動車両用モータの冷却制御装置および冷却制御方法 |
| JP6190327B2 (ja) * | 2014-06-19 | 2017-08-30 | 本田技研工業株式会社 | 電動機制御システム |
| US10594178B2 (en) * | 2015-09-08 | 2020-03-17 | Lg Electronics Inc. | Rotor and motor including the same |
-
2020
- 2020-01-28 JP JP2020012002A patent/JP7363528B2/ja active Active
- 2020-12-21 EP EP20215966.1A patent/EP3859292B1/en active Active
- 2020-12-22 US US17/131,064 patent/US11581842B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002354721A (ja) | 2001-05-29 | 2002-12-06 | Hitachi Ltd | 永久磁石式回転子を備えた回転電機 |
| JP2006074887A (ja) | 2004-09-01 | 2006-03-16 | Suzuki Motor Corp | 電動機のロータ |
| JP2006304462A (ja) | 2005-04-19 | 2006-11-02 | Mitsubishi Heavy Ind Ltd | モータ駆動システム及び永久磁石モータ制御方法 |
| JP2009278733A (ja) | 2008-05-13 | 2009-11-26 | Asmo Co Ltd | モータ制御装置 |
| JP2013081312A (ja) | 2011-10-04 | 2013-05-02 | Nsk Ltd | 電動パワーステアリング用電動機及び電動パワーステアリング装置 |
| JP2017108568A (ja) | 2015-12-11 | 2017-06-15 | 株式会社エクセディ | モータ制御装置及びハイブリッド式車両の駆動制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11581842B2 (en) | 2023-02-14 |
| EP3859292A1 (en) | 2021-08-04 |
| US20210234495A1 (en) | 2021-07-29 |
| EP3859292B1 (en) | 2024-01-31 |
| JP2021118652A (ja) | 2021-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Lindh et al. | Multidisciplinary design of a permanent-magnet traction motor for a hybrid bus taking the load cycle into account | |
| JP6500872B2 (ja) | 駆動装置および自動車 | |
| JP7363528B2 (ja) | モータの磁石温度推定装置、及びそれを備えるハイブリッド車 | |
| WO2013051618A1 (ja) | 回転電機及び電動車両 | |
| JP6865184B2 (ja) | 駆動モータ及び電動車両 | |
| Rahim et al. | Design of axial flux permanent magnet brushless DC motor for direct drive of electric vehicle | |
| US11271504B2 (en) | Motor control system | |
| JP7347250B2 (ja) | 移動体の制御装置 | |
| JP2007267514A (ja) | 電動4輪駆動車及び電動4輪駆動車に用いられる電動モータ | |
| JP7363529B2 (ja) | モータの磁石温度推定装置、及びそれを備えるハイブリッド車 | |
| JP5573769B2 (ja) | 回転電機装置、車両用駆動装置、回転電機の制御方法、および車両用駆動装置の制御方法 | |
| JP7363530B2 (ja) | モータの制御装置、及びそれを備えるハイブリッド車 | |
| JP7404916B2 (ja) | 移動体の制御装置 | |
| JP2007259575A (ja) | 界磁巻線型同期電動機及び電動駆動装置 | |
| JP2001169406A (ja) | 車両制動装置 | |
| US11342873B2 (en) | Controller for switched reluctance motor | |
| JP2010213429A (ja) | 回転電機 | |
| EP3490137B1 (en) | Controller for switched reluctance motor | |
| JP7206723B2 (ja) | 電動発電機の制御装置 | |
| Jelden et al. | The electric powertrain matrix from volkswagen | |
| NAGARJUNA REDDY | REGENERATIVE BRAKING OF PMSM AT LOW SPEEDS BY DISTRIBUTING BATTERY PACK | |
| JP2023145910A (ja) | 電動車両 | |
| JP2021129438A (ja) | モータ制御装置 | |
| JP2022187700A (ja) | 電動車両の制御装置 | |
| JP2019047573A (ja) | スイッチトリラクタンスモータの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220720 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230627 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230918 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7363528 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |