JP7200210B2 - 移動体 - Google Patents
移動体 Download PDFInfo
- Publication number
- JP7200210B2 JP7200210B2 JP2020217649A JP2020217649A JP7200210B2 JP 7200210 B2 JP7200210 B2 JP 7200210B2 JP 2020217649 A JP2020217649 A JP 2020217649A JP 2020217649 A JP2020217649 A JP 2020217649A JP 7200210 B2 JP7200210 B2 JP 7200210B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- control
- ecu
- moving body
- steering angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/002—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits computing target steering angles for front or rear wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0409—Electric motor acting on the steering column
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0484—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures for reaction to failures, e.g. limp home
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
また、本発明の一態様の移動体は、操向装置と、前記操向装置を制御して移動体の操向を制御する操向制御装置と、を有する移動体であって、前記操向制御装置は、前記移動体の移動状況に基づいて前記移動体の操向を制御する第一操向制御と、前記移動体の操向を制限する第二操向制御と、を選択的に行い、前記第一操向制御を行っている状態にて、前記第一操向制御の実行に関する障害が発生した場合には、前記障害の発生前の前記第一操向制御による前記移動体の操向状態に基づいて、前記第二操向制御を行い、前記操向装置は、手動操作に応じて前記移動体の操向を変更可能であり、前記第二操向制御は、前記移動体の車輪の操向角を前記第一操向制御による前記移動体の操向状態に基づく値に維持する操向角維持制御と、前記操向装置に含まれるアクチュエータのトルクを前記第一操向制御による前記移動体の操向状態に基づく値に維持するトルク維持制御と、を含み、前記操向制御装置は、前記障害が発生し且つ前記操向角維持制御が不可の場合には、前記トルク維持制御を行うものである。
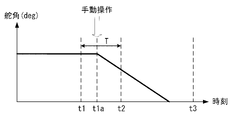
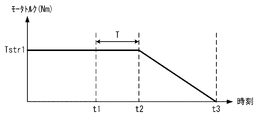
以上のように、自動車10によれば、舵角制御を行っている状態にて、舵角制御の実行に関する障害が発生した場合には、その障害の発生前の操向状態(舵角又はモータ28のトルク)に基づいて舵角維持制御又はトルク維持制御が行われる。例えば、舵角制御によって自動車10が弧状の道路(いわゆるカーブ)を走行しているときに障害が発生した場合には、舵角維持制御又はトルク維持制御が行われることで、ステアリングホイール20を操作しなくとも、上記の時間Tの間は、自動車10がそのカーブに沿って移動できるようになる。したがって、運転者がステアリングホイール20の手動操作を開始するまでの間、自動車10を安全に移動させることができる。
メインECU36mは、障害発生直前の舵角を舵角維持制御時に用いる目標舵角とする代わりに、障害の発生したタイミングから所定期間の間における舵角センサ52により検出された舵角の代表値を、舵角維持制御時に用いる目標舵角としてもよい。所定期間の舵角の代表値とは、例えば、この所定期間に検出された全ての舵角の平均値、又は、この所定期間に検出された全ての舵角の中央値等である。
上記実施形態では、舵角維持制御又はトルク維持制御を最大限継続させる時間Tを固定の値として説明した。しかし、この時間Tは、自動車10の移動状況に応じて決められる可変値としてもよい。具体的には、走行支援ECU128が、自動車10の位置と、自動車10の車速Vと、自動車10が走行中の道路の道路情報(曲率情報)と、カメラ120の撮像画像から求まる走行中の道路の曲率情報と、に基づいて時間Tを導出し、導出した時間TをEPS-ECU36に送信する処理、を逐次実行する構成としてもよい。なお、曲率情報については、地図情報に含まれるものと、カメラ120の撮像画像から求まるものとのいずれかのみを、時間Tの導出に使用する構成としてもよい。
図8は、舵角制御が行われているときの走行支援ECU128の動作の変形例を説明するためのフローチャートである。図8において、図7と同じ処理には同一符号を付して説明を省略する。図8に示すフローチャートは、ステップS21とステップS22とステップS23が追加された点を除いては、図7と同じである。
図8において、ステップS22及びステップS23の処理を省略し、ステップS21の判定がYESのときはステップS11の処理が行われ、ステップS21の判定がNOときはステップS13の処理が行われるようにしてもよい。つまり、自動車10が直進路を走行中であれば時間Tの導出を停止し、自動車10が直進路を走行中であっても舵角維持制御又はトルク維持制御を禁止しないようにしてもよい、このようにした場合のEPS-ECU36の動作は、図3に示したものと同じになる。ただし、時間Tは走行支援ECU128によって導出された値に設定される。
EPS-ECU36は、サブECU36sが削除された構成であってもよい。この場合、メインECU36mが舵角制御を行っている状態で、走行支援ECU128から目標舵角が取得できなくなり、舵角制御が継続できなくなった場合には、メインECU36mが舵角維持制御を行う。この構成であっても、障害発生後は、ステアリングホイール20の操作を行うことなく、自動車10を一定期間、道路に沿って移動させることは可能である。
EPS-ECU36からメインECU36mが削除され、走行支援ECU128とサブECU36sが通信可能に接続された構成であってもよい。この場合には、サブECU36sが、舵角制御の代わりに、モータ28のトルクを制御するトルク制御を行う。トルク制御とは、走行支援ECU128から指示された目標舵角と自動車10の車速Vに基づいて、この目標舵角の実現に必要なトルク指示値(駆動電流値)を求め、この駆動電流値をモータ28に供給する制御である。このトルク制御は、第一操向制御を構成する。サブECU36sは、走行支援ECU128から目標舵角が取得できなくなり、トルク制御が継続できなくなった場合には、前述したトルク維持制御を行う。この構成であっても、障害発生後は、ステアリングホイール20の操作を行うことなく、自動車10を一定期間、道路に沿って移動させることは可能である。
前記操向制御装置は、
前記移動体の移動状況に基づいて前記移動体の操向を制御する第一操向制御(舵角制御)と、前記移動体の操向を制限する第二操向制御(舵角維持制御、トルク維持制御)と、を選択的に行い、
前記第一操向制御を行っている状態にて、前記第一操向制御の実行に関する障害が発生した場合には、前記障害の発生前の前記第一操向制御による前記移動体の操向状態(舵角、モータトルク)に基づいて、前記第二操向制御を行う移動体。
前記操向制御装置は、前記障害が発生した場合にのみ、前記第二操向制御を行う移動体。
前記操向制御装置は、前記第二操向制御を開始してから所定時間(時間T)経過後に、前記第二操向制御を終了する移動体。
前記操向装置は、手動操作に応じて前記移動体の操向を変更可能であり、
前記操向制御装置は、前記第二操向制御を開始した後、前記手動操作が行われない場合でも、前記所定時間経過後に前記第二操向制御を終了する移動体。
前記所定時間は、前記移動体の移動している経路の曲率情報に基づいて決定される移動体。
前記所定時間は、前記移動体の移動する速度に基づいて決定される移動体。
前記操向装置は、手動操作に応じて前記移動体の操向を変更可能であり、
前記操向制御装置は、前記第二操向制御を行っている状態で前記手動操作がなされた場合には、前記第二操向制御を終了する移動体。
前記操向装置は、手動操作に応じて前記移動体の操向を変更可能であり、
前記第二操向制御は、前記移動体の車輪(前輪86)の操向角を前記第一操向制御による前記移動体の操向状態に基づく値に維持する操向角維持制御(舵角維持制御)と、前記操向装置に含まれるアクチュエータ(モータ28)のトルクを前記第一操向制御による前記移動体の操向状態に基づく値に維持するトルク維持制御と、を含み、
前記操向制御装置は、前記障害が発生し且つ前記操向角維持制御が不可の場合には、前記トルク維持制御を行う移動体。
36 EPS-ECU(操向制御装置)
Claims (6)
- 操向装置と、前記操向装置を制御して移動体の操向を制御する操向制御装置と、を有する移動体であって、
前記操向制御装置は、
前記移動体の移動状況に基づいて前記移動体の操向を制御する第一操向制御と、前記移動体の操向を制限する第二操向制御と、を選択的に行い、
前記第一操向制御を行っている状態にて、前記第一操向制御の実行に関する障害が発生した場合には、前記障害の発生前の前記第一操向制御による前記移動体の操向状態に基づいて、前記第二操向制御を行い、
前記操向制御装置は、前記第二操向制御を開始してから所定時間経過後に、前記第二操向制御を終了する移動体。 - 請求項1記載の移動体であって、
前記操向装置は、手動操作に応じて前記移動体の操向を変更可能であり、
前記操向制御装置は、前記第二操向制御を開始した後、前記手動操作が行われない場合でも、前記所定時間経過後に前記第二操向制御を終了する移動体。 - 請求項1又は2記載の移動体であって、
前記所定時間は、前記移動体の移動している経路の曲率情報に基づいて決定される移動体。 - 請求項1から3のいずれか1項記載の移動体であって、
前記所定時間は、前記移動体の移動する速度に基づいて決定される移動体。 - 請求項1から4のいずれか1項記載の移動体であって、
前記操向装置は、手動操作に応じて前記移動体の操向を変更可能であり、
前記操向制御装置は、前記第二操向制御を行っている状態で前記手動操作がなされた場合には、前記第二操向制御を終了する移動体。 - 操向装置と、前記操向装置を制御して移動体の操向を制御する操向制御装置と、を有する移動体であって、
前記操向制御装置は、
前記移動体の移動状況に基づいて前記移動体の操向を制御する第一操向制御と、前記移動体の操向を制限する第二操向制御と、を選択的に行い、
前記第一操向制御を行っている状態にて、前記第一操向制御の実行に関する障害が発生した場合には、前記障害の発生前の前記第一操向制御による前記移動体の操向状態に基づいて、前記第二操向制御を行い、
前記操向装置は、手動操作に応じて前記移動体の操向を変更可能であり、
前記第二操向制御は、前記移動体の車輪の操向角を前記第一操向制御による前記移動体の操向状態に基づく値に維持する操向角維持制御と、前記操向装置に含まれるアクチュエータのトルクを前記第一操向制御による前記移動体の操向状態に基づく値に維持するトルク維持制御と、を含み、
前記操向制御装置は、前記障害が発生し且つ前記操向角維持制御が不可の場合には、前記トルク維持制御を行う移動体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020217649A JP7200210B2 (ja) | 2020-12-25 | 2020-12-25 | 移動体 |
| US17/529,568 US12179852B2 (en) | 2020-12-25 | 2021-11-18 | Moving body |
| CN202111575354.5A CN114684259B (zh) | 2020-12-25 | 2021-12-20 | 移动体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020217649A JP7200210B2 (ja) | 2020-12-25 | 2020-12-25 | 移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022102741A JP2022102741A (ja) | 2022-07-07 |
| JP7200210B2 true JP7200210B2 (ja) | 2023-01-06 |
Family
ID=82118495
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020217649A Active JP7200210B2 (ja) | 2020-12-25 | 2020-12-25 | 移動体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12179852B2 (ja) |
| JP (1) | JP7200210B2 (ja) |
| CN (1) | CN114684259B (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005096745A (ja) | 2003-08-28 | 2005-04-14 | Nissan Motor Co Ltd | 車両用操舵装置 |
| JP2014184745A (ja) | 2013-03-21 | 2014-10-02 | Toyota Motor Corp | 操舵制御装置 |
| US20140358374A1 (en) | 2013-05-28 | 2014-12-04 | Mando Corporation | Method and apparatus for controlling steering when failure occurs in motor position sensor |
| WO2017068895A1 (ja) | 2015-10-21 | 2017-04-27 | Kyb株式会社 | 電動パワーステアリング装置 |
| JP2018161917A (ja) | 2017-03-24 | 2018-10-18 | アイシン精機株式会社 | 車両 |
Family Cites Families (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3728823B2 (ja) * | 1996-09-03 | 2005-12-21 | 日産自動車株式会社 | 車両用走行制御装置 |
| JPH10167101A (ja) | 1996-12-11 | 1998-06-23 | Nissan Motor Co Ltd | 操舵制御装置 |
| JP3257971B2 (ja) * | 1997-09-12 | 2002-02-18 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP4419114B2 (ja) * | 2000-11-14 | 2010-02-24 | 株式会社ジェイテクト | 車両用操舵装置 |
| US6580989B1 (en) * | 2002-08-20 | 2003-06-17 | Visteon Global Technologies, Inc. | Motor vehicle steering system |
| US6842678B2 (en) * | 2002-08-20 | 2005-01-11 | Visteon Global Technologies, Inc. | Motor vehicle steering system |
| DE10302268A1 (de) | 2003-01-22 | 2004-07-29 | Zf Lenksysteme Gmbh | Lenksystem für Kraftfahrzeuge |
| US7004279B2 (en) * | 2003-08-28 | 2006-02-28 | Nissan Motor Co., Ltd. | Vehicle steering system |
| JP4111191B2 (ja) * | 2004-12-28 | 2008-07-02 | 日産自動車株式会社 | 車両用操舵装置 |
| US7604083B2 (en) * | 2005-06-07 | 2009-10-20 | Nissan Motor Co., Ltd. | Steering apparatus for a vehicle |
| FR2887839B1 (fr) * | 2005-07-04 | 2007-09-14 | Conception & Dev Michelin Sa | Systeme de direction d'un vehicule comportant un mode de fonctionnement degrade en cas de panne d'un actionneur de braquage de roue. |
| JP4853053B2 (ja) * | 2006-03-03 | 2012-01-11 | 日産自動車株式会社 | 車両用操舵制御装置 |
| JP4525621B2 (ja) * | 2006-03-14 | 2010-08-18 | トヨタ自動車株式会社 | 車両の操舵装置 |
| EP2026458A1 (en) * | 2006-05-31 | 2009-02-18 | NSK Ltd. | Electric power steering device |
| US8099219B2 (en) | 2007-10-27 | 2012-01-17 | GM Global Technology Operations LLC | Method and apparatus for securing an operating range state mechanical transmission |
| EP2537732B1 (en) * | 2010-02-19 | 2020-09-02 | Mitsubishi Electric Corporation | Steering controller |
| CN102612456B (zh) * | 2010-04-14 | 2014-12-31 | 丰田自动车株式会社 | 车辆的控制装置 |
| JP5232266B2 (ja) * | 2011-04-21 | 2013-07-10 | 積水化学工業株式会社 | 電力制御システム |
| WO2014054265A1 (ja) * | 2012-10-03 | 2014-04-10 | 日産自動車株式会社 | ステアリング制御装置、ステアリング制御方法 |
| DE102014201107B4 (de) * | 2013-02-06 | 2016-02-11 | Ford Global Technologies, Llc | Verfahren und Vorrichtung zur Beschränkung eines unterstützenden Lenkmoments in einem Lenksystem mit elektronischer Lenkunterstützung |
| JP6379907B2 (ja) * | 2014-09-16 | 2018-08-29 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP5965968B2 (ja) * | 2014-11-19 | 2016-08-10 | 本田技研工業株式会社 | 電動パワーステアリング装置及び保舵支援制御装置 |
| JP6143802B2 (ja) * | 2015-02-02 | 2017-06-07 | 本田技研工業株式会社 | 車両走行制御装置 |
| JP6001122B1 (ja) * | 2015-03-31 | 2016-10-05 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| WO2018168897A1 (ja) * | 2017-03-15 | 2018-09-20 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP6686967B2 (ja) * | 2017-05-29 | 2020-04-22 | トヨタ自動車株式会社 | パワーステアリング装置 |
| JP6950546B2 (ja) * | 2018-01-24 | 2021-10-13 | スズキ株式会社 | 車両の走行制御装置 |
| DE102018103082B4 (de) * | 2018-02-12 | 2023-09-21 | Thyssenkrupp Ag | Verfahren zur Bereitstellung einer Lenkkraftunterstützung für ein elektromechanisches Lenksystem eines Kraftfahrzeuges mit einem redundant ausgelegten Steuergerät |
| WO2019188951A1 (ja) * | 2018-03-26 | 2019-10-03 | 株式会社ジェイテクト | 制御装置、転舵装置、制御方法及びプログラム |
| CN108638983B (zh) | 2018-03-29 | 2021-11-16 | 中通客车控股股份有限公司 | 一种电动客车双源助力转向系统及控制方法 |
| JP7117233B2 (ja) * | 2018-12-14 | 2022-08-12 | 日本電産モビリティ株式会社 | 電子制御装置、制御方法、及び電子制御プログラム |
| KR102637909B1 (ko) * | 2019-01-23 | 2024-02-19 | 에이치엘만도 주식회사 | 전동식 파워 스티어링 시스템의 리던던시 회로 |
| JP7343294B2 (ja) * | 2019-04-19 | 2023-09-12 | 株式会社ジェイテクト | 電源回路及び電源装置 |
| JP7192646B2 (ja) * | 2019-05-07 | 2022-12-20 | 株式会社デンソー | 回転電機制御装置 |
| JP7205373B2 (ja) * | 2019-05-07 | 2023-01-17 | 株式会社デンソー | 回転電機制御装置 |
| US11577776B2 (en) * | 2020-03-05 | 2023-02-14 | Tusimple, Inc. | Managing redundant steering system for autonomous vehicles |
| CN111422250B (zh) | 2020-04-16 | 2022-12-30 | 芜湖汽车前瞻技术研究院有限公司 | 后轮转向控制方法、装置、系统及计算机存储介质 |
| KR102745130B1 (ko) * | 2020-05-06 | 2024-12-23 | 현대모비스 주식회사 | 전동식 조향시스템의 제어 장치 및 방법 |
-
2020
- 2020-12-25 JP JP2020217649A patent/JP7200210B2/ja active Active
-
2021
- 2021-11-18 US US17/529,568 patent/US12179852B2/en active Active
- 2021-12-20 CN CN202111575354.5A patent/CN114684259B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005096745A (ja) | 2003-08-28 | 2005-04-14 | Nissan Motor Co Ltd | 車両用操舵装置 |
| JP2014184745A (ja) | 2013-03-21 | 2014-10-02 | Toyota Motor Corp | 操舵制御装置 |
| US20140358374A1 (en) | 2013-05-28 | 2014-12-04 | Mando Corporation | Method and apparatus for controlling steering when failure occurs in motor position sensor |
| WO2017068895A1 (ja) | 2015-10-21 | 2017-04-27 | Kyb株式会社 | 電動パワーステアリング装置 |
| JP2018161917A (ja) | 2017-03-24 | 2018-10-18 | アイシン精機株式会社 | 車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12179852B2 (en) | 2024-12-31 |
| US20220204071A1 (en) | 2022-06-30 |
| JP2022102741A (ja) | 2022-07-07 |
| CN114684259A (zh) | 2022-07-01 |
| CN114684259B (zh) | 2024-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7321993B2 (ja) | 移動体 | |
| EP3345806B1 (en) | Vehicle steering system | |
| JP6376352B2 (ja) | 車両の走行制御装置 | |
| CN110356471B (zh) | 车辆控制系统 | |
| EP3699062B1 (en) | Steering system | |
| JP2019156327A (ja) | 車両の車線逸脱防止制御装置 | |
| CN111483517B (zh) | 车辆控制系统 | |
| JP6599795B2 (ja) | 操舵アシスト装置及び操舵アシスト回路 | |
| JP6663767B2 (ja) | 車両の操舵支援装置 | |
| JP2015069341A (ja) | 運転支援装置 | |
| JP7211149B2 (ja) | 電動パワーステアリング装置 | |
| JP2006264374A (ja) | 車両用操舵装置 | |
| JP7200210B2 (ja) | 移動体 | |
| JP7157793B2 (ja) | 移動体 | |
| JP4014817B2 (ja) | 車両の操舵制御装置 | |
| JPH0826129A (ja) | 自動操舵装置の制御方法 | |
| US12545321B2 (en) | Steering control device and steering control method | |
| JP7319957B2 (ja) | 移動体 | |
| KR20140135360A (ko) | 조향 제어 방법 및 제어 장치 | |
| KR20170139885A (ko) | 능동 전륜 조향 장치 및 능동 전륜 조향 장치의 조향 휠 보조 제어 방법 | |
| JP3725455B2 (ja) | 車両の操舵制御装置 | |
| JP6822742B2 (ja) | 駐車支援装置 | |
| JPH06336163A (ja) | 自動操舵装置の制御装置 | |
| JPH06336169A (ja) | 自動操舵装置の制御方法 | |
| KR20200027103A (ko) | 조향 제어 장치 및 방법과, 조향 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221004 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221221 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7200210 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |