JP7112527B2 - Dsiプロトコルに基づいて動力車両におけるセンサー構成を動作させる方法 - Google Patents
Dsiプロトコルに基づいて動力車両におけるセンサー構成を動作させる方法 Download PDFInfo
- Publication number
- JP7112527B2 JP7112527B2 JP2020569115A JP2020569115A JP7112527B2 JP 7112527 B2 JP7112527 B2 JP 7112527B2 JP 2020569115 A JP2020569115 A JP 2020569115A JP 2020569115 A JP2020569115 A JP 2020569115A JP 7112527 B2 JP7112527 B2 JP 7112527B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- message
- processing unit
- central processing
- sending
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/4013—Management of data rate on the bus
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/403—Bus networks with centralised control, e.g. polling
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/12—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40267—Bus for use in transportation systems
- H04L2012/40273—Bus for use in transportation systems the transportation system being a vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Quality & Reliability (AREA)
- Small-Scale Networks (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
- Selective Calling Equipment (AREA)
Description
CRMモード(Command and Response mode)では、マスターとスレーブとの間で双方向通信が行われる。マスターはコマンド(Command)を送信し、スレーブはそれに応答(Response)する。この方法は、例えば、スレーブを構成したり、スレーブから特定の値を選択的に問い合わせたりするように、使用される。
ASIL A:推奨される故障確率は10-6/時間未満
ASIL B:推奨される故障確率は10-7/時間未満
ASIL C:必要な故障確率は10-7/時間未満
ASIL D:必要な故障確率は10-8/時間未満
ASILレベルA、B、C、及びDは、それぞれのシステムのための対応の要件がある。ドライバーからの対応する要求にもかかわらず動力車両が加速しない場合、例えば、ASIL Bのみが適用され、ASIL Dは完全に自律的な運転のシステムに適用される。
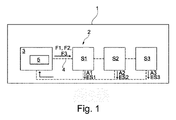
- センサー構成は、マスターとして中央処理装置を有し、マスターによって制御されるスレーブとして複数のセンサーユニットを有し、
- 中央処理装置及びセンサーユニットはバスラインに接続され、
- 中央処理装置とセンサーユニットとの間の通信は、バスラインを介して行われ、
以下の方法ステップによって特徴付けられる
- 中央処理装置から第1センサーに第1メッセージを送信し、その後
- 第1センサーからの応答メッセージを受信することを中央処理装置が待機することなく、中央処理装置から第2センサーに第2メッセージを送信する、
方法が提供される。
- 事前にメッセージが直接送信されたセンサーからの応答メッセージを受信することを中央処理装置が待つことなく、中央処理装置から別のセンサーに更なるメッセージを送信する。このケースにおいても、事前に直接的に送信されたメッセージの送信が完了した直後に更なるメッセージの送信が開始される実施形態には、利点がある。さらに、事前にメッセージが直接送信されたセンサーは、それが受信したメッセージに関する応答メッセージを送信しないものと好ましくは考えられる。
- 中央処理装置から受信されたメッセージに関する応答メッセージをセンサーが送信することを禁止するメッセージを、中央処理装置からセンサーに送信する。これは、CRMモードとは異なり、センサーからの応答メッセージを必要としないことによって時間を節約せずにむしろそれらを禁止するモードに、システム全体を切り替える。
2 センサー構成
3 中央処理装置
4 バスライン
S1 センサーユニット
S2 センサーユニット
S3 センサーユニット
Claims (11)
- DSIプロトコルに基づいて動力車両(1)におけるセンサー構成(2)を動作させる方法であって、
- 前記センサー構成(2)は、マスターとして中央処理装置(3)を有し、前記マスターによって制御されるスレーブとして複数のセンサーユニット(S1、S2、S3)を有し、
- 前記中央処理装置(3)及び前記センサーユニット(S1、S2、S3)はバスライン(4)に接続され、
- 前記中央処理装置(3)と前記センサーユニット(S1、S2、S3)との間の通信は、前記バスライン(4)を介して行われ、
以下の方法ステップ:
- 前記中央処理装置(3)から第1センサー(S1)に第1メッセージを送信すること、及びその後
- 前記中央処理装置(3)が前記第1センサー(S1)からの応答メッセージを受信するのを待たずに、前記中央処理装置(3)から第2センサー(S2)に第2メッセージを送信すること、
によって特徴付けられ、
前記第2メッセージの送信は、前記第1メッセージの送信が完了した直後に、開始され、
前記第1センサー(S1)は、前記第1メッセージを受信した際に、応答メッセージを送信しない、方法。 - 請求項1に記載の方法であって、前記第2メッセージの送信に続く以下の方法ステップ:
- 事前にメッセージが直接送信された前記センサー(S2)からの応答メッセージを受信することを前記中央処理装置(3)が待つことなく、前記中央処理装置(3)から別のセンサー(S3)に更なるメッセージを送信すること
によって特徴付けられる方法。 - 事前に直接送信された前記メッセージの送信が完了した直後に、前記更なるメッセージの送信が開始されることを特徴とする請求項2に記載の方法。
- 事前にメッセージが直接送信された前記センサー(S2)は、それが受信した前記メッセージに関する応答メッセージを送信しないことを特徴とする請求項2又は3に記載の方法。
- 事前にメッセージが直接送信された前記センサー(S2)からの応答メッセージを受信することを前記中央処理装置(3)が待つことなく前記中央処理装置(3)から別のセンサー(S3)に更なるメッセージを送信する前記方法ステップは、更に別のセンサーに関して少なくとも1回繰り返される請求項2~4のうちの一項に記載の方法。
- 前記中央処理装置(3)から前記センサー(S1、S2、S3)に送信される前記メッセージは、個々のセンサー(S1、S2、S3)に関する構成コマンドを含むことを特徴とする請求項1~5のうちの1つに記載の方法。
- 請求項1~6のうちの一項に記載の方法であって、前記第1メッセージの送信に先行する以下の方法ステップ:
- 前記センサー(S1、S2、S3)が前記中央処理装置から受信したメッセージに関する応答メッセージを送信することを禁止するメッセージを、前記中央処理装置から前記センサー(S1、S2、S3)に送信すること、
により特徴付けられる方法。 - 動力車両(1)における請求項1~7のうちの一項に記載の方法の使用。
- プロセッサで実行されると請求項1~7のうちの一項に記載の方法を実施するコマンドであってそれに格納されたコマンドを有する不揮発性のコンピュータ読み取り可能記憶媒体。
- 請求項1~7のうちの一項に記載の方法によって動作するように構成されるセンサー構成。
- センサーユニット(S1、S2、S3)として超音波信号を送信及び/又は受信するための超音波センサーユニットを備える請求項10に記載のセンサー構成。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018114225.0 | 2018-06-14 | ||
| DE102018114225.0A DE102018114225A1 (de) | 2018-06-14 | 2018-06-14 | Verfahren zum Betreiben einer Sensoranordnung in einem Kraftfahrzeug auf Basis eines DSI-Protokolls |
| PCT/EP2019/063563 WO2019238395A1 (de) | 2018-06-14 | 2019-05-27 | Verfahren zum betreiben einer sensoranordnung in einem kraftfahrzeug auf basis eines dsi-protokolls |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021527986A JP2021527986A (ja) | 2021-10-14 |
| JP7112527B2 true JP7112527B2 (ja) | 2022-08-03 |
Family
ID=66752060
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020569115A Active JP7112527B2 (ja) | 2018-06-14 | 2019-05-27 | Dsiプロトコルに基づいて動力車両におけるセンサー構成を動作させる方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11424954B2 (ja) |
| EP (1) | EP3808038A1 (ja) |
| JP (1) | JP7112527B2 (ja) |
| KR (1) | KR102549091B1 (ja) |
| CN (1) | CN112514331B (ja) |
| DE (1) | DE102018114225A1 (ja) |
| WO (1) | WO2019238395A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20030071532A (ko) | 2002-02-27 | 2003-09-03 | 칼소닉 칸세이 가부시끼가이샤 | 다중 통신 시스템 및 이를 이용한 승원 보호 시스템 |
| JP2010258990A (ja) | 2009-04-28 | 2010-11-11 | Autonetworks Technologies Ltd | 制御システム及び制御プログラム更新方法 |
| WO2016054345A1 (en) | 2014-10-01 | 2016-04-07 | Sensor Networks, Inc. | Asset-condition monitoring system |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3099663B2 (ja) * | 1995-02-09 | 2000-10-16 | 株式会社デンソー | 通信システム |
| DE10236879B4 (de) * | 2001-08-14 | 2013-10-24 | Denso Corporation | Hindernis-Detektionsgerät und damit in Beziehung stehendes Kommunikationsgerät |
| ATE347215T1 (de) * | 2004-09-27 | 2006-12-15 | Bft Spa | Verfahren und system zur übertragung in einem hausnetzwerk |
| DE102005054390B4 (de) * | 2005-11-15 | 2015-07-30 | Robert Bosch Gmbh | Fahrerassistenzsystem |
| US7746114B2 (en) * | 2007-11-14 | 2010-06-29 | Denso Corporation | Bus switch and electronic switch |
| DE102008000570A1 (de) | 2008-03-07 | 2009-09-10 | Robert Bosch Gmbh | Ultraschallbasiertes Fahrerassistenzsystem |
| JP5268125B2 (ja) | 2008-06-30 | 2013-08-21 | フリースケール セミコンダクター インコーポレイテッド | 通信バスの故障管理 |
| US8644791B2 (en) * | 2008-07-31 | 2014-02-04 | Freescale Semiconductor, Inc. | Communications module apparatus, integrated circuit and method of communicating data |
| WO2010020838A1 (en) * | 2008-08-22 | 2010-02-25 | Freescale Semiconductor, Inc. | Communicating on an electrical bus |
| JP5045797B2 (ja) * | 2010-02-24 | 2012-10-10 | 株式会社デンソー | 通信用スレーブ |
| DE102011080169A1 (de) * | 2011-08-01 | 2013-02-07 | Robert Bosch Gmbh | Kommunikationsanbindung für Sensorik in Fahrzeug-Regelsystemen |
| DE102012103907A1 (de) | 2012-05-04 | 2013-11-07 | Continental Automotive Gmbh | Verfahren zum Betrieb einer Empfangseinheit eines mit zumindest einer Sendeeinheit verbundenen Kraftfahrzeugsteuergeräts |
| JP5532078B2 (ja) * | 2012-05-23 | 2014-06-25 | 株式会社デンソー | 乗員保護装置 |
| US9292409B2 (en) * | 2013-06-03 | 2016-03-22 | Infineon Technologies Ag | Sensor interfaces |
| DE102013226376A1 (de) | 2013-12-18 | 2015-06-18 | Robert Bosch Gmbh | Verfahren zur Sensoranbindung |
| DE102014102714A1 (de) * | 2014-02-28 | 2015-09-03 | Infineon Technologies Ag | Integrierte Schaltung mit ESD-Schutzstruktur und Photonenquelle |
| US9563590B2 (en) * | 2014-03-17 | 2017-02-07 | Nxp Usa, Inc. | Devices with arbitrated interface busses, and methods of their operation |
| US9688221B2 (en) * | 2015-08-18 | 2017-06-27 | Infineon Technologies Ag | Current loop sensor interface using a terminated symmetrical physical layer |
| US10079650B2 (en) * | 2015-12-04 | 2018-09-18 | Infineon Technologies Ag | Robust high speed sensor interface for remote sensors |
| DE102017101545A1 (de) * | 2017-01-26 | 2018-07-26 | Infineon Technologies Ag | Sensorsteuereinheit, Sensorsignalempfänger, ein Modul mit inkrementellem, magnetischem Geschwindigkeitssensor, ein Verfahren für eine Sensorsteuereinheit, ein Verfahren für einen Sensorsignalempfänger und Computerprogramm |
| DE102017103117A1 (de) * | 2017-02-16 | 2018-08-16 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Betrieb einer Sensoranordnung auf Basis eines DSI-Protokolls in einem Kraftfahrzeug sowie eine entsprechende Sensoranordnung in einem Kraftfahrzeug |
| DE102017103724B4 (de) * | 2017-02-23 | 2019-11-28 | Infineon Technologies Ag | Vorrichtung und Verfahren zum Steuern eines Sensorbauelements eines Sicherheitssystems eines Objekts, Steuerungssystem für ein Automobilfahrzeug und Sensorbauelement für ein Sicherheitssystem eines Automobilfahrzeugs |
| DE102017118574A1 (de) * | 2017-08-15 | 2019-02-21 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Betreiben einer Sensoranordnung in einem Kraftfahrzeug auf Basis eines DSI-Protokolls |
| US10678243B2 (en) * | 2018-02-13 | 2020-06-09 | Chongqing Jinkang New Energy Vehicle Co., Ltd. | Systems and methods for scalable electrical engineering (EE) architecture in vehicular environments |
| US11163303B2 (en) * | 2018-02-13 | 2021-11-02 | Nvidia Corporation | Sharing sensor data between multiple controllers to support vehicle operations |
| DE102018112587A1 (de) * | 2018-05-25 | 2019-11-28 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Betreiben einer Sensoranordnung in einem Kraftfahrzeug auf Basis eines DSI-Protokolls |
-
2018
- 2018-06-14 DE DE102018114225.0A patent/DE102018114225A1/de active Pending
-
2019
- 2019-05-27 WO PCT/EP2019/063563 patent/WO2019238395A1/de active Application Filing
- 2019-05-27 KR KR1020217001098A patent/KR102549091B1/ko active IP Right Grant
- 2019-05-27 JP JP2020569115A patent/JP7112527B2/ja active Active
- 2019-05-27 CN CN201980047272.8A patent/CN112514331B/zh active Active
- 2019-05-27 EP EP19728348.4A patent/EP3808038A1/de active Pending
- 2019-05-27 US US16/973,865 patent/US11424954B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20030071532A (ko) | 2002-02-27 | 2003-09-03 | 칼소닉 칸세이 가부시끼가이샤 | 다중 통신 시스템 및 이를 이용한 승원 보호 시스템 |
| JP2003258821A (ja) | 2002-02-27 | 2003-09-12 | Calsonic Kansei Corp | 多重通信装置及びそれを用いた乗員保護装置 |
| US20040024832A1 (en) | 2002-02-27 | 2004-02-05 | Calsonic Kansei Corporation | Multiplex communication system and car-passenger protection system using the same |
| JP2010258990A (ja) | 2009-04-28 | 2010-11-11 | Autonetworks Technologies Ltd | 制御システム及び制御プログラム更新方法 |
| WO2016054345A1 (en) | 2014-10-01 | 2016-04-07 | Sensor Networks, Inc. | Asset-condition monitoring system |
Non-Patent Citations (1)
| Title |
|---|
| DSI Bus Standard Version 2.5,DSI Standard,2009年04月16日,第1-20頁,https://www.dsiconsortium.org/downloads/DSI_2.5_20090416.pdf |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210184888A1 (en) | 2021-06-17 |
| DE102018114225A1 (de) | 2019-12-19 |
| US11424954B2 (en) | 2022-08-23 |
| WO2019238395A1 (de) | 2019-12-19 |
| CN112514331A (zh) | 2021-03-16 |
| KR20210018950A (ko) | 2021-02-18 |
| KR102549091B1 (ko) | 2023-06-28 |
| CN112514331B (zh) | 2023-02-17 |
| EP3808038A1 (de) | 2021-04-21 |
| JP2021527986A (ja) | 2021-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102296138B1 (ko) | Dsi 프로토콜에 기초하여 자동차의 센서 배열체를 동작시키는 방법 | |
| US11349301B2 (en) | Method for operating a sensor arrangement in a motor vehicle on the basis of a DSI protocol | |
| US20200241130A1 (en) | Methods for operating a sensor arrangement on the basis of a dsi protocol in a motor vehicle and also a corresponding sensor arrangement in a motor vehicle | |
| KR102298186B1 (ko) | Dsi 프로토콜에 기초하여 자동차 내 센서 장치를 작동시키는 방법 | |
| CN111490918B (zh) | 车载以太网网络唤醒系统、方法、装置和计算机设备 | |
| US9715471B2 (en) | Master bus device for a vehicle communication bus of a motor vehicle | |
| CN112311638A (zh) | 智能网络装置 | |
| JP7112527B2 (ja) | Dsiプロトコルに基づいて動力車両におけるセンサー構成を動作させる方法 | |
| US5585788A (en) | Data transmission system for automotive vehicles | |
| EP3761568A1 (en) | Method of controlling communication over a local interconnect network bus | |
| JP4013592B2 (ja) | 車両通信システム | |
| US20170187650A1 (en) | Switch unit, ethernet network, and method for activating components in an ethernet network | |
| JP2004040649A (ja) | 車載通信装置 | |
| JP2009171138A (ja) | 個体情報記憶システム、個体情報記憶方法、ノード、及び検査装置 | |
| JP7347391B2 (ja) | 通信装置 | |
| JP5128089B2 (ja) | 車載データベース分配ノード、電子制御ユニットおよび車載データベースシステム | |
| WO2022163279A1 (ja) | 補助電源システム、モジュール、補助電源制御方法、及びプログラム | |
| JP2024018617A (ja) | 車両制御システム | |
| JP2023016644A (ja) | 識別子設定方法 | |
| JPH01143535A (ja) | 多重伝送方式 | |
| JP2016158142A (ja) | 中継装置 | |
| JPH10136465A (ja) | 車両データ伝送システム | |
| JPH10285189A (ja) | 車両多重通信装置 | |
| JPH10187598A (ja) | 車両データ伝送システム | |
| JP2005297653A (ja) | 車載電子制御装置の通信装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220215 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220513 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220624 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220722 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7112527 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |