JP7089340B2 - ロボットシステム - Google Patents
ロボットシステム Download PDFInfo
- Publication number
- JP7089340B2 JP7089340B2 JP2016243135A JP2016243135A JP7089340B2 JP 7089340 B2 JP7089340 B2 JP 7089340B2 JP 2016243135 A JP2016243135 A JP 2016243135A JP 2016243135 A JP2016243135 A JP 2016243135A JP 7089340 B2 JP7089340 B2 JP 7089340B2
- Authority
- JP
- Japan
- Prior art keywords
- sticking
- sandwiching
- sticking member
- base
- robot hand
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Manipulator (AREA)
- Labeling Devices (AREA)
- Feeding Of Articles By Means Other Than Belts Or Rollers (AREA)
- Folding Of Thin Sheet-Like Materials, Special Discharging Devices, And Others (AREA)
- Automatic Assembly (AREA)
Description
好ましくは、前記ロボットハンドは、前記貼付部材の挟着及び解放が可能に構成された挟着ユニットを備える。
好ましくは、前記挟着ユニットは、前記貼付部材の挟着及び解放が可能に構成された挟着機構と、前記貼付部材を前記被貼付物に対して押し付け可能に構成された押圧機構を備える。
好ましくは、前記挟着機構は、ベース面を有する挟着ベースと、第1シリンダ機構を備え、第1シリンダ機構は、第1シリンダベースと、これからの突出長が可変に構成された第1ロッドを備え、前記挟着機構は、前記ベース面と第1ロッドの間に前記貼付部材を挟着するように構成される。
好ましくは、前記押圧機構は、前記挟着ベースに対して回動可能な回動ベースと、前記回動ベースに設けられ且つ前記貼付部材に押し付けられる押圧部を有する。
好ましくは、前記回動ベースは、前記押圧部が前記貼付部材に押し付けられる押付方向に付勢されている。
好ましくは、前記押圧機構は、第2シリンダ機構を備え、第2シリンダ機構は、第2シリンダベースと、これからの突出長が可変に構成された第2ロッドを備え、前記押圧機構は、第2ロッドの突出長を変化させることによって前記挟着ベースに対する前記回動ベースの相対角度を調節可能に構成されている。
好ましくは、前記ロボットハンドは、第3シリンダ機構を有し、第3シリンダ機構は、第3シリンダベースと、これからの突出長が可変に構成された第3ロッドを備え、前記挟着ユニットは、第3ロッドに設けられる。
好ましくは、前記ロボットハンドは、一列に並んだ複数の前記挟着ユニットを備え、前記供給機構は、一列に並んだ複数の前記貼付部材を供給可能に構成されており、前記ロボットハンドは、複数の前記挟着ユニットで複数の前記貼付部材を一度に挟着するように構成される。
好ましくは、前記ロボットハンドは、複数の前記挟着ユニットを1つずつ突出させて、複数の前記貼付部材を1つずつ前記被貼付物に貼付けるように構成される。
好ましくは、前記貼付部材は、不織布である。
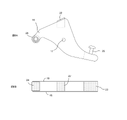
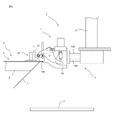
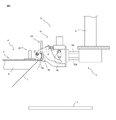
図2に示すように、貼付部材1は、一面に粘着剤層1aを備えており、粘着剤層1aを被貼付物2に対向させて状態で貼付部材1を被貼付物2に押し付けることによって貼付部材1を被貼付物2に貼付け可能になっている。本実施形態では、貼付部材1としては、ある程度の厚さを有するものが想定されており、貼付部材1の厚さは、例えば0.5~5mmであり、具体的には例えば、0.5、1、1.5、2、2.5、3、3.5、4、4.5、5mmであり、ここで例示した数値の何れか2つの間の範囲内であってもよい。貼付部材1は、ガタツキ、振動、静音化などの目的で被貼付物2に貼着されるものであり、その材質は特に限定されないが、例えば、不織布である。不織布は、通気性を有するために真空吸引機構によってピックアップすることが難しい。後述するように本実施形態では、貼付機構3は、貼付部材1をロボットハンド5で挟着することによって貼付部材1をピックアップするので、不織布のような通気性を有する貼付部材1であっても確実にピックアップすることが可能である。被貼付物2は、例えば、デッキボードなどの自動車内装部材である。
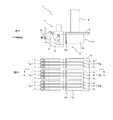
貼付機構3は、ロボットハンド5とロボットアーム6を備える。ロボットアーム6は、ロボットハンド5を移動させる機能を有し、具体的には、ロボットハンド5が貼付部材1を挟着してピックアップした後にロボットハンド5を被貼付物2の貼付位置にまで移動させる機能を有する。ロボットアーム6は、上記機能の実現に必要な軸数を有するものであればよく、6軸以上を有するものが好ましい。
次に、図8~図14を用いて、貼付部材1を被貼付物2に貼り付ける方法を説明する。
(1)まず、図8に示すように、先頭列C1の3つの貼付部材1をカバー材7から剥離する。
(2)次に、図8に示すように、押圧手段26によって2列目C2の貼付部材1を押圧する。
(3)次に、図8に示すように、貼付部材1を挟着しようとする挟着ユニット11が取り付けられているシリンダ機構13を作動させてロッド13bの突出長を長くすることによって、貼付部材1を挟着しようとする挟着ユニット11を残りの挟着ユニット11よりも突出させる(図4を参照)。ここでは、3つの挟着ユニット11からなる挟着ユニット群11gによって先頭列C1の3つの貼付部材1を一度に挟着するので、挟着ユニット群11gが取り付けられているシリンダ機構群13gの各ロッド13bの突出長を長くする。その状態で、貼付部材1をベース面15aと当接部27の間に配置する。この際に、貼付部材1の粘着剤層1aをベース面15aに接触させてもよい。
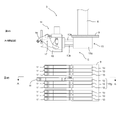
(4)次に、図9に示すように、ロッド18bの突出長を増大させることによってベース面15aと当接部27の間に貼付部材1を挟着する。この際、挟着ユニット群11gを構成する3つの挟着ユニット11が先頭列C1の3つの貼付部材1を同時に挟着する。
(5)次に、図10に示すように、ロボットアーム6で挟着ユニット11を移動させるとともにロッド13bの突出長を短くすることによって貼付部材1をテープ部材Tから完全に分離する。
(6)ここまでの工程を3つの挟着ユニット群11gについて行うことによって、9つの挟着ユニット11に9つの貼付部材1が挟着される。
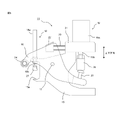
(8)次に、図12に示すように、ロッド19b(図5を参照)の突出長を短縮することによって付勢部材20の復元力により回動ベース16を反時計回りに回転させて押圧部24を貼付部材1に接触させる。図12の状態では、当接部28と位置決めボルト25が当接している。ロッド19bの突出長は、押圧部24が貼付部材1に接触するが、付勢部材20の復元力が貼付部材1に加わらないように設定されている。
(9)次に、図13に示すように、貼付部材1を被貼付物2に接触させる。図13の状態では、当接部28と位置決めボルト25は当接しておらず、付勢部材20の復元力が押圧部24を通じて貼付部材1に加えられている。
(10)次に、図13~図14に示すように、ロッド18bの突出長を短縮することによって、ベース面15aと当接部27による挟着状態から貼付部材1を解放する。次に、図14の矢印Xで示すように、被貼付物2の表面に沿って挟着ユニット11を移動させることによって貼付部材1を被貼付物2に貼り付ける。
(11)次に、(7)~(10)を全ての貼付部材1について繰り返し行うことによって、被貼付物2の9箇所に貼付部材1を貼り付けることができる。
・テープ部材Tの各列に設けられる貼付部材1の数は1又は2つであってもよく、4つ以上であってもよく、複数であることが好ましい。
・挟着ユニット群11gを構成する挟着ユニット11の数は、1又は2つであってもよく、4つ以上であってもよく、複数であることが好ましい。
・挟着ユニット群11gの数は、1又は2つであってもよく、4つ以上であってもよく、複数であることが好ましい。
・上記工程(7)~(10)に含まれる各動作は、適宜順序を入れ替えることができる。
・貼付部材1を被貼付物2に接触させた後に、押圧部24を貼付部材1に接触させてもよい。
・押圧部24を貼付部材1に接触させた後にロッド13bの突出長を長くしてもよい。
・押圧部24を貼付部材1に接触させた後にロボットハンド5を傾斜させてもよい。
1a :粘着剤層
2 :被貼付物
3 :貼付機構
4 :供給機構
5 :ロボットハンド
6 :ロボットアーム
7 :カバー材
8 :屈曲治具
8a :先端
8b :上面
8c :傾斜面
9 :保持プレート
10 :ロボットシステム
11 :挟着ユニット
11g :挟着ユニット群
13 :シリンダ機構
13a :シリンダベース
13b :ロッド
13g :シリンダ機構群
15 :挟着ベース
15a :ベース面
16 :回動ベース
17 :軸部
18 :シリンダ機構
18a :シリンダベース
18b :ロッド
19 :シリンダ機構
19a :シリンダベース
19b :ロッド
20 :付勢部材
21 :付勢部材支持部
22 :当接ブロック
23 :支持ブロック
24 :押圧部
25 :位置決めボルト
26 :押圧手段
26a :板部
26b :シリンダ機構
27 :当接部
28 :当接部
R1 :送出ローラ
R2 :巻取ローラ
T :テープ部材
Claims (10)
- 貼付部材を挟着して被貼付物に貼付け可能に構成される貼付機構と、前記貼付部材を供給可能な供給機構を備えるロボットシステムであって、
前記貼付機構は、前記貼付部材の挟着及び解放が可能に構成されたロボットハンドと、前記ロボットハンドを移動可能に構成されたロボットアームを備え、
前記供給機構は、前記貼付機構とは別体であり、且つ前記貼付部材がカバー材に貼着された状態で前記貼付部材を供給し、且つ前記カバー材を前記貼付部材から離れる方向に屈曲させることによって前記貼付部材を前記カバー材から剥離させた状態で前記ロボットハンドが前記貼付部材を挟着可能になるように構成され、
前記ロボットハンドは、一列に並んだ複数の挟着ユニットを備え、
前記挟着ユニットは、それぞれ、前記貼付部材の挟着及び解放が可能に構成され、
前記供給機構は、一列に並んだ複数の前記貼付部材を供給可能に構成されており、
前記ロボットハンドは、複数の前記挟着ユニットで複数の前記貼付部材を一度に挟着するように構成され、
前記ロボットハンドは、複数の前記挟着ユニットを1つずつ突出させて、複数の前記貼付部材を1つずつ前記被貼付物に貼付けるように構成され、
前記貼付部材は、不織布である、ロボットシステム。 - 前記挟着ユニットは、前記貼付部材の挟着及び解放が可能に構成された挟着機構と、前記貼付部材を前記被貼付物に対して押し付け可能に構成された押圧機構を備える、請求項1に記載のシステム。
- 前記挟着機構は、ベース面を有する挟着ベースと、第1シリンダ機構を備え、
第1シリンダ機構は、第1シリンダベースと、これからの突出長が可変に構成された第1ロッドを備え、
前記挟着機構は、前記ベース面と第1ロッドの間に前記貼付部材を挟着するように構成される、請求項2に記載のシステム。 - 前記押圧機構は、前記挟着ベースに対して回動可能な回動ベースと、前記回動ベースに設けられ且つ前記貼付部材に押し付けられる押圧部を有する、請求項3に記載のシステム。
- 貼付部材を挟着して被貼付物に貼付け可能に構成される貼付機構と、前記貼付部材を供給可能な供給機構を備えるロボットシステムであって、
前記貼付機構は、前記貼付部材の挟着及び解放が可能に構成されたロボットハンドと、前記ロボットハンドを移動可能に構成されたロボットアームを備え、
前記供給機構は、前記貼付機構とは別体であり、且つ前記貼付部材がカバー材に貼着された状態で前記貼付部材を供給し、且つ前記カバー材を前記貼付部材から離れる方向に屈曲させることによって前記貼付部材を前記カバー材から剥離させた状態で前記ロボットハンドが前記貼付部材を挟着可能になるように構成され、
前記ロボットハンドは、前記貼付部材の挟着及び解放が可能に構成された挟着ユニットを備え
前記挟着ユニットは、前記貼付部材の挟着及び解放が可能に構成された挟着機構と、前記貼付部材を前記被貼付物に対して押し付け可能に構成された押圧機構を備え、
前記挟着機構は、ベース面を有する挟着ベースと、第1シリンダ機構を備え、
第1シリンダ機構は、第1シリンダベースと、これからの突出長が可変に構成された第1ロッドを備え、
前記挟着機構は、前記ベース面と第1ロッドの間に前記貼付部材を挟着するように構成され、
前記押圧機構は、前記挟着ベースに対して回動可能な回動ベースと、前記回動ベースに設けられ且つ前記貼付部材に押し付けられる押圧部を有する、ロボットシステム。 - 前記ロボットハンドは、一列に並んだ複数の前記挟着ユニットを備え、
前記供給機構は、一列に並んだ複数の前記貼付部材を供給可能に構成されており、
前記ロボットハンドは、複数の前記挟着ユニットで複数の前記貼付部材を一度に挟着するように構成される、請求項5に記載のシステム。 - 前記ロボットハンドは、複数の前記挟着ユニットを1つずつ突出させて、複数の前記貼付部材を1つずつ前記被貼付物に貼付けるように構成される、請求項6に記載のシステム。
- 前記回動ベースは、前記押圧部が前記貼付部材に押し付けられる押付方向に付勢されている、請求項4~請求項7の何れか1つに記載のシステム。
- 前記押圧機構は、第2シリンダ機構を備え、
第2シリンダ機構は、第2シリンダベースと、これからの突出長が可変に構成された第2ロッドを備え、
前記押圧機構は、第2ロッドの突出長を変化させることによって前記挟着ベースに対する前記回動ベースの相対角度を調節可能に構成されている、請求項8に記載のシステム。 - 貼付部材を挟着して被貼付物に貼付け可能に構成される貼付機構と、前記貼付部材を供給可能な供給機構を備えるロボットシステムであって、
前記貼付機構は、前記貼付部材の挟着及び解放が可能に構成されたロボットハンドと、前記ロボットハンドを移動可能に構成されたロボットアームを備え、
前記供給機構は、前記貼付機構とは別体であり、且つ前記貼付部材がカバー材に貼着された状態で前記貼付部材を供給し、且つ前記カバー材を前記貼付部材から離れる方向に屈曲させることによって前記貼付部材を前記カバー材から剥離させた状態で前記ロボットハンドが前記貼付部材を挟着可能になるように構成され、
前記ロボットハンドは、一列に並んだ複数の挟着ユニットを備え、
前記挟着ユニットは、それぞれ、前記貼付部材の挟着及び解放が可能に構成され、
前記供給機構は、一列に並んだ複数の前記貼付部材を供給可能に構成されており、
前記ロボットハンドは、複数の前記挟着ユニットで複数の前記貼付部材を一度に挟着するように構成され、
前記ロボットハンドは、複数の前記挟着ユニットを1つずつ突出させて、複数の前記貼付部材を1つずつ前記被貼付物に貼付けるように構成され、
前記ロボットハンドは、第3シリンダ機構を有し、
第3シリンダ機構は、第3シリンダベースと、これからの突出長が可変に構成された第3ロッドを備え、
前記挟着ユニットは、第3ロッドに設けられる、ロボットシステム。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016243135A JP7089340B2 (ja) | 2016-12-15 | 2016-12-15 | ロボットシステム |
| PCT/JP2017/044990 WO2018110677A1 (ja) | 2016-12-15 | 2017-12-14 | ロボットシステム及び切断刃 |
| CN201780077515.3A CN110072779B (zh) | 2016-12-15 | 2017-12-14 | 机器人系统 |
| KR1020197020435A KR102456986B1 (ko) | 2016-12-15 | 2017-12-14 | 로봇 시스템 |
| EP17880315.1A EP3556670B1 (en) | 2016-12-15 | 2017-12-14 | Robot system |
| US16/468,559 US11247338B2 (en) | 2016-12-15 | 2017-12-14 | Robot system and cutting blade |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016243135A JP7089340B2 (ja) | 2016-12-15 | 2016-12-15 | ロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018095297A JP2018095297A (ja) | 2018-06-21 |
| JP7089340B2 true JP7089340B2 (ja) | 2022-06-22 |
Family
ID=62632175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016243135A Active JP7089340B2 (ja) | 2016-12-15 | 2016-12-15 | ロボットシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7089340B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7323869B2 (ja) * | 2021-02-24 | 2023-08-09 | 株式会社ウエーブ | 面ファスナーテープの貼付方法および貼付装置 |
| JP7312470B2 (ja) * | 2021-02-24 | 2023-07-21 | 株式会社ウエーブ | 粘着テープの貼付方法および貼付装置 |
| CN115674268B (zh) * | 2022-09-27 | 2025-06-06 | 珠海格力智能装备有限公司 | 侧姿模组、机械手及控制方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002205718A (ja) | 2000-12-28 | 2002-07-23 | Nisca Corp | ラベル供給装置及びラベル供給方法 |
| JP2002274516A (ja) | 2001-03-14 | 2002-09-25 | Ricoh Co Ltd | 粘着シール把持機構 |
| JP2005206192A (ja) | 2004-01-22 | 2005-08-04 | Sato Corp | ラベル貼付システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6342512U (ja) * | 1986-09-04 | 1988-03-22 | ||
| JPS63114048A (ja) * | 1986-10-31 | 1988-05-18 | Nippon Carbide Ind Co Ltd | 乾電池用外装ラベル及びその製造法 |
| JPH081831Y2 (ja) * | 1990-05-28 | 1996-01-24 | 日合エンジニアリング株式会社 | シート切断装置 |
| JP3530575B2 (ja) * | 1994-05-24 | 2004-05-24 | 多摩川精機株式会社 | ラベル貼着方法 |
| US5705024A (en) * | 1995-09-28 | 1998-01-06 | Becton, Dickinson And Company | System for application of labels |
-
2016
- 2016-12-15 JP JP2016243135A patent/JP7089340B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002205718A (ja) | 2000-12-28 | 2002-07-23 | Nisca Corp | ラベル供給装置及びラベル供給方法 |
| JP2002274516A (ja) | 2001-03-14 | 2002-09-25 | Ricoh Co Ltd | 粘着シール把持機構 |
| JP2005206192A (ja) | 2004-01-22 | 2005-08-04 | Sato Corp | ラベル貼付システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018095297A (ja) | 2018-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018110677A1 (ja) | ロボットシステム及び切断刃 | |
| JP7089340B2 (ja) | ロボットシステム | |
| JP2009253083A (ja) | シート貼付装置及び貼付方法 | |
| JP4848129B2 (ja) | ラベル貼付装置 | |
| JP2009145428A (ja) | ラベルシート及びラベルシート作成装置 | |
| JP6631324B2 (ja) | 台紙剥離装置 | |
| JP2004224353A (ja) | ラベル剥離装置 | |
| JP5186572B2 (ja) | ラベル貼付装置 | |
| JP2021089950A (ja) | シート剥離装置 | |
| JP4651840B2 (ja) | 剥離紙分離装置 | |
| JP2014240300A (ja) | ラベル貼付装置 | |
| JP4341760B2 (ja) | 薄板状物の送り装置 | |
| KR20000057008A (ko) | 라미네이터 | |
| JP5390543B2 (ja) | ラベルを剥離する装置 | |
| JP2006082812A (ja) | ラベル剥離方法、剥離装置及びラベル貼付装置 | |
| JP5951276B2 (ja) | ラベル貼付装置 | |
| JP5113646B2 (ja) | シート貼付装置及び貼付方法 | |
| JP2008081125A (ja) | 貼付ヘッド及びこれを用いたシート貼付方法 | |
| WO2022030535A1 (ja) | シート供給装置およびシート供給方法 | |
| JP2012035887A (ja) | シート剥離装置および剥離方法 | |
| JP7037888B2 (ja) | ワーク片の製造方法 | |
| JP3214019U (ja) | 剥離治具 | |
| JPH0487225A (ja) | クリック板又は可動接片の取り付け方法 | |
| JP2010120672A (ja) | ラベル貼付装置 | |
| JPH11246111A (ja) | シート剥離装置およびシート剥離方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201013 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201030 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210309 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210331 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20210331 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20210409 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20210413 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20210514 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20210518 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20220412 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20220510 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20220607 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20220607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220610 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7089340 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |