JP7007943B2 - 振動波モータ及び振動波モータを備えたレンズ駆動装置 - Google Patents
振動波モータ及び振動波モータを備えたレンズ駆動装置 Download PDFInfo
- Publication number
- JP7007943B2 JP7007943B2 JP2018020884A JP2018020884A JP7007943B2 JP 7007943 B2 JP7007943 B2 JP 7007943B2 JP 2018020884 A JP2018020884 A JP 2018020884A JP 2018020884 A JP2018020884 A JP 2018020884A JP 7007943 B2 JP7007943 B2 JP 7007943B2
- Authority
- JP
- Japan
- Prior art keywords
- vibrator
- friction member
- wave motor
- pressurizing
- vibration wave
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
- H02N2/004—Rectangular vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
- H02N2/006—Elastic elements, e.g. springs
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0065—Friction interface
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/04—Constructional details
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
- Lens Barrels (AREA)
Description
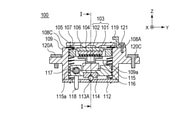
以下に、本発明の実施例1を添付の図1~3に基づいて詳細に説明する。図面において、相対移動の方向をX方向、加圧方向をZ方向、X方向、Z方向のいずれにも直交する方向をY方向と定義する。
D1>D2 (1)
実施例2は、実施例1とは異なり、第1の振動子203A、第2の振動子203Bの2つを備えており、高推力タイプの振動波モータ200となっている。なお、実施例1と同様な構成については、詳細な説明を省略する。また、第1の振動子203Aの構成と同様な構成を有する第2の振動子203B及びこれに関係する部材については括弧書きで示し、その詳細な説明を省略する。なお、図において不図示である部材等には括弧を付して記載する。
A1>A2 (2)
B1>B2 (3)
次に、実施例1の振動波モータ100をレンズ駆動装置10に用いた適用例を説明する。図7はレンズ駆動装置10とカメラ装置1の概略図である。レンズ駆動装置10は、レンズ部11及びフォーカスユニット20を備え、フォーカスユニット20の内部に振動波モータ100とフォーカスレンズ部12を備える。レンズ駆動装置10は、カメラ装置1に取り付けられており、レンズ部11、フォーカスレンズ部12を通過した光束を受光する撮像素子2を備える。上記構成により、撮像素子2で得られる画像信号をもとに焦点検出を行い、焦点検出結果に基づき振動波モータ100でフォーカスレンズ部12をX方向に駆動する。そして、フォーカスレンズ部12を駆動させることにより、撮像素子2上で合焦するように振動波モータ100が駆動制御される。
12 フォーカスレンズ部(レンズ部)
23A、23B ガイドバー(案内部材)
100、200 振動波モータ
101、201A(B) 振動体
102、202A(B) 圧電素子
103、203A(B) 振動子
116、216A(B) 摩擦部材
106、206A(B) 第1の伝達部材(加圧手段)
107、207A(B) 第2の伝達部材(加圧手段)
117、217 ガイド部材
108A~D 加圧バネ(加圧手段)
109 保持部材
109a、109b 規制部(第1の規制手段)
113A、113B 転動ボール(転動部材)
119 規制部材(第2の規制手段)
209a、209b 規制部(第1の規制手段)
209c、209d 規制部(第2の規制手段)
213A、213B 転動ボール(転動部材)
219A(B) 第3の伝達部材(加圧手段)
A1、A2、B1、B2 移動量
D1、D2 移動量
Claims (11)
- 振動体と圧電素子とを備えた振動子と、
摩擦部材と、
前記振動子と前記摩擦部材とを接触させる方向に加圧する加圧手段と、
を備え、
前記振動子に発生する振動により前記振動子と前記摩擦部材とを前記加圧手段の加圧方向と直交する方向に相対移動させ、
前記振動子及び前記摩擦部材は、前記振動子と前記摩擦部材との前記相対移動の方向への移動に伴って移動しない固定部材に対して、前記加圧方向と平行な方向に移動可能であり、
前記加圧方向と平行な方向における前記摩擦部材の移動可能量が前記加圧方向と平行な方向における前記振動子の移動可能量より小さくなるように、前記摩擦部材の前記移動可能量を規制する第1の規制手段と前記振動子の前記移動可能量を規制する第2の規制手段とを備えることを特徴とする、振動波モータ。 - 前記振動子は、少なくとも第1の振動子と第2の振動子とを備え、前記第1の規制手段は、前記加圧方向から見たときに前記第1の振動子と前記第2の振動子の間に配置されることを特徴する、請求項1に記載の振動波モータ。
- 前記摩擦部材を案内するガイド部材を備え、前記摩擦部材は前記ガイド部材を中心に回転することを特徴とする、請求項1又は2に記載の振動波モータ。
- 前記摩擦部材を案内する転動部材を備え、前記第1の規制手段により規制された前記摩擦部材の前記移動可能量は、前記転動部材の大きさより小さいことを特徴とする、請求項1乃至3のいずれか1項に記載の振動波モータ。
- 前記振動子と前記摩擦部材との前記相対移動をガイドするガイド機構を備え、
前記ガイド機構は、前記相対移動の方向への移動に伴って移動する第1のガイド部と、前記相対移動の方向への移動に伴って移動しない第2のガイド部と、前記第1のガイド部と前記第2のガイド部との間に配置される転動部材とを有し、
前記第1のガイド部と前記第2のガイド部の一方は、前記摩擦部材の前記加圧方向と平行な方向への移動に伴って前記加圧方向と平行な方向へ移動し、
前記摩擦部材の前記移動可能量は、前記転動部材が前記第1のガイド部と前記第2のガイド部との間から脱落しないように前記第2の規制手段によって規制されることを特徴とする、請求項1又は2に記載の振動波モータ。 - 前記摩擦部材が前記相対移動の方向に移動し、前記振動子が固定されていることを特徴とする、請求項1乃至5のいずれか1項に記載の振動波モータ。
- 前記第1の規制手段と前記第2の規制手段は、前記固定部材に備えられていることを特徴とする、請求項1乃至6のいずれか1項に記載の振動波モータ。
- 前記振動は、超音波領域の周波数の高周波振動であり、前記振動波モータは超音波モータであることを特徴とする、請求項1乃至7のいずれか1項に記載の振動波モータ。
- 請求項1乃至8のいずれか1項に記載の振動波モータと、
前記振動波モータにより駆動されるレンズ部と、
該レンズ部を直進に移動可能に保持する案内部材と、
を備えたことを特徴とする、レンズ駆動装置。 - 振動体と圧電素子とを備えた振動子と、
摩擦部材と、
前記振動子と前記摩擦部材とを接触させる加圧手段と、
被駆動部材と、
を備え、
前記振動子に発生する振動により前記振動子と前記摩擦部材とを前記加圧手段の加圧方向と直交する方向に相対移動させることで前記被駆動部材を移動させ、
前記振動子及び前記摩擦部材は、前記振動子と前記摩擦部材との前記相対移動の方向への移動に伴って移動しない固定部材に対して、前記加圧方向と平行な方向に移動可能であり、
前記加圧方向と平行な方向における前記摩擦部材の移動可能量を規制する第1の規制手段と、前記第1の規制手段とは異なる前記加圧方向と平行な方向における前記振動子の移動可能量を規制する第2の規制手段と、によって、前記加圧方向と平行な方向における前記摩擦部材の移動可能量が前記振動子の移動可能量より小さくなるように、前記摩擦部材の前記移動可能量と前記振動子の前記移動可能量とが規制されていることを特徴とする、駆動装置。 - レンズを備え、
前記振動子に発生する振動により前記振動子と前記摩擦部材とを前記加圧手段の前記加圧方向と直交する方向に前記相対移動させることで前記レンズを移動させることを特徴とする、請求項10に記載の駆動装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018020884A JP7007943B2 (ja) | 2018-02-08 | 2018-02-08 | 振動波モータ及び振動波モータを備えたレンズ駆動装置 |
| CN201910097489.1A CN110138267B (zh) | 2018-02-08 | 2019-01-31 | 振动波马达和包括振动波马达的透镜驱动设备 |
| KR1020190013206A KR102449959B1 (ko) | 2018-02-08 | 2019-02-01 | 진동파 모터 및 진동파 모터를 구비한 렌즈 구동장치 |
| US16/269,347 US11165368B2 (en) | 2018-02-08 | 2019-02-06 | Vibration wave motor and lens drive apparatus including the vibration wave motor |
| EP19155745.3A EP3537592B1 (en) | 2018-02-08 | 2019-02-06 | Vibration wave motor and lens drive apparatus including the vibration wave motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018020884A JP7007943B2 (ja) | 2018-02-08 | 2018-02-08 | 振動波モータ及び振動波モータを備えたレンズ駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019140764A JP2019140764A (ja) | 2019-08-22 |
| JP2019140764A5 JP2019140764A5 (ja) | 2021-03-25 |
| JP7007943B2 true JP7007943B2 (ja) | 2022-01-25 |
Family
ID=65351931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018020884A Active JP7007943B2 (ja) | 2018-02-08 | 2018-02-08 | 振動波モータ及び振動波モータを備えたレンズ駆動装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11165368B2 (ja) |
| EP (1) | EP3537592B1 (ja) |
| JP (1) | JP7007943B2 (ja) |
| KR (1) | KR102449959B1 (ja) |
| CN (1) | CN110138267B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5773900B2 (ja) * | 2012-01-30 | 2015-09-02 | キヤノン株式会社 | モータ |
| JP7599840B2 (ja) * | 2020-04-30 | 2024-12-16 | キヤノン株式会社 | 駆動装置及び駆動装置を備えた撮像装置 |
| JP7562358B2 (ja) | 2020-09-30 | 2024-10-07 | キヤノン株式会社 | 振動型駆動装置およびこれを備えた装置 |
| DE102020126863A1 (de) | 2020-10-13 | 2022-04-14 | Physik Instrumente (PI) GmbH & Co KG | Stellvorrichtung und verfahren zu deren montage |
| JP7676188B2 (ja) | 2021-03-31 | 2025-05-14 | キヤノン株式会社 | 振動型アクチュエータ並びにそれを有する光学機器及び電子機器 |
| JP2023019753A (ja) | 2021-07-29 | 2023-02-09 | キヤノン株式会社 | 振動型アクチュエータ及び撮像装置 |
| WO2025142394A1 (ja) * | 2023-12-28 | 2025-07-03 | ミツミ電機株式会社 | 光学素子駆動装置、カメラモジュールおよびカメラ搭載装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008172995A (ja) | 2006-12-15 | 2008-07-24 | Olympus Imaging Corp | 駆動装置および撮像装置 |
| JP2014212682A (ja) | 2013-04-01 | 2014-11-13 | キヤノン株式会社 | リニア超音波モータ及びそれを用いた光学装置 |
| JP2017022957A (ja) | 2015-07-15 | 2017-01-26 | キヤノン株式会社 | 振動波モータ |
| JP2018124541A (ja) | 2017-01-30 | 2018-08-09 | キヤノン株式会社 | 駆動装置、光学機器及び撮像装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5230994B2 (ja) | 1972-01-17 | 1977-08-11 | ||
| JP2005057839A (ja) * | 2003-08-06 | 2005-03-03 | Olympus Corp | 振動波リニアモータ及びそれを用いたレンズ装置 |
| JP4309736B2 (ja) * | 2003-10-01 | 2009-08-05 | オリンパス株式会社 | 振動波リニアモータ |
| KR20060077314A (ko) * | 2004-12-30 | 2006-07-05 | 삼성전기주식회사 | 압전 구동 유닛 및 이를 구비하는 렌즈 구동 장치 |
| JP2009044932A (ja) | 2007-08-10 | 2009-02-26 | Olympus Corp | 超音波モータの駆動方法及び超音波モータ |
| KR20100039158A (ko) * | 2008-10-07 | 2010-04-15 | 삼성전자주식회사 | 초음파 모터 및 그것을 구비한 이송장치 |
| KR20110094464A (ko) * | 2010-02-16 | 2011-08-24 | 삼성전자주식회사 | 압전 액추에이터 조립체 및 이를 구비하는 광학 시스템 |
| US8643252B2 (en) * | 2010-05-11 | 2014-02-04 | Canon Kabushiki Kaisha | Vibration wave actuator |
| JP2012165496A (ja) * | 2011-02-03 | 2012-08-30 | Tamron Co Ltd | 振動モータ及びレンズ駆動機構 |
| JP6110629B2 (ja) * | 2012-11-04 | 2017-04-05 | キヤノン株式会社 | 超音波モータ、及び超音波モータ付き機器駆動装置 |
| JP6422248B2 (ja) * | 2013-07-10 | 2018-11-14 | キヤノン株式会社 | 駆動装置及びそれを有するレンズ駆動装置 |
| JP6532300B2 (ja) | 2015-05-29 | 2019-06-19 | キヤノン株式会社 | 振動波モータ |
| JP6535237B2 (ja) * | 2015-07-06 | 2019-06-26 | トヨタホーム株式会社 | 建物の柱構造 |
| JP6808345B2 (ja) * | 2016-04-28 | 2021-01-06 | キヤノン株式会社 | 振動波モータおよび振動波モータが搭載された電子機器、レンズ鏡筒、撮像装置 |
-
2018
- 2018-02-08 JP JP2018020884A patent/JP7007943B2/ja active Active
-
2019
- 2019-01-31 CN CN201910097489.1A patent/CN110138267B/zh active Active
- 2019-02-01 KR KR1020190013206A patent/KR102449959B1/ko active Active
- 2019-02-06 EP EP19155745.3A patent/EP3537592B1/en active Active
- 2019-02-06 US US16/269,347 patent/US11165368B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008172995A (ja) | 2006-12-15 | 2008-07-24 | Olympus Imaging Corp | 駆動装置および撮像装置 |
| JP2014212682A (ja) | 2013-04-01 | 2014-11-13 | キヤノン株式会社 | リニア超音波モータ及びそれを用いた光学装置 |
| JP2017022957A (ja) | 2015-07-15 | 2017-01-26 | キヤノン株式会社 | 振動波モータ |
| JP2018124541A (ja) | 2017-01-30 | 2018-08-09 | キヤノン株式会社 | 駆動装置、光学機器及び撮像装置 |
| US20190348928A1 (en) | 2017-01-30 | 2019-11-14 | Canon Kabushiki Kaisha | Driving device, optical device, and image pickup device |
Also Published As
| Publication number | Publication date |
|---|---|
| US11165368B2 (en) | 2021-11-02 |
| CN110138267B (zh) | 2022-07-05 |
| CN110138267A (zh) | 2019-08-16 |
| KR102449959B1 (ko) | 2022-10-05 |
| US20190245460A1 (en) | 2019-08-08 |
| KR20190096288A (ko) | 2019-08-19 |
| JP2019140764A (ja) | 2019-08-22 |
| EP3537592B1 (en) | 2021-05-05 |
| EP3537592A1 (en) | 2019-09-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7007943B2 (ja) | 振動波モータ及び振動波モータを備えたレンズ駆動装置 | |
| KR102137195B1 (ko) | 모터 및 모터를 구비한 전자기기 | |
| JP6567020B2 (ja) | 駆動装置、光学機器及び撮像装置 | |
| JP6806472B2 (ja) | 振動波モータ及び振動波モータを適用した光学機器 | |
| JP2017200366A (ja) | 振動波モータおよび振動波モータが搭載された電子機器 | |
| US11533002B2 (en) | Vibration type motor, optical apparatus, and driving apparatus using damper to suppress noise | |
| JP2021131460A (ja) | 光学駆動装置および光学機器 | |
| JP7094799B2 (ja) | 振動型モータおよび駆動装置 | |
| JP6808344B2 (ja) | 振動波モータおよび振動波モータが搭載された電子機器、レンズ鏡筒、撮像装置 | |
| US11502625B2 (en) | Vibration wave motor, and driving apparatus having the same | |
| JP6537482B2 (ja) | 振動波モータおよび電子機器 | |
| JP7258674B2 (ja) | 振動型モータ、レンズ装置、および、電子機器 | |
| CN112468015B (zh) | 振动型马达和驱动设备 | |
| KR20050109647A (ko) | 렌즈이송모듈 | |
| JP2018165755A (ja) | 光学機器 | |
| JP2019083664A (ja) | 振動波モータ、レンズ装置、および、撮像装置 | |
| JP2019201465A (ja) | 振動波モータ及び駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210205 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210922 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210928 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211209 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220107 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7007943 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |