JP6833504B2 - 振れ補正装置およびこれを用いたレンズ装置、撮像装置 - Google Patents
振れ補正装置およびこれを用いたレンズ装置、撮像装置 Download PDFInfo
- Publication number
- JP6833504B2 JP6833504B2 JP2016254217A JP2016254217A JP6833504B2 JP 6833504 B2 JP6833504 B2 JP 6833504B2 JP 2016254217 A JP2016254217 A JP 2016254217A JP 2016254217 A JP2016254217 A JP 2016254217A JP 6833504 B2 JP6833504 B2 JP 6833504B2
- Authority
- JP
- Japan
- Prior art keywords
- optical axis
- correction device
- guide
- unit
- urging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/035—DC motors; Unipolar motors
- H02K41/0352—Unipolar motors
- H02K41/0354—Lorentz force motors, e.g. voice coil motors
- H02K41/0356—Lorentz force motors, e.g. voice coil motors moving along a straight path
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Adjustment Of Camera Lenses (AREA)
- Structure And Mechanism Of Cameras (AREA)
- Studio Devices (AREA)
Description
ベース部材と、
レンズユニットを保持するとともに、該レンズユニットの光軸に垂直な方向への移動が可能な保持部材と、
前記保持部材を移動させるための駆動ユニットと、
前記光軸の方向において前記保持部材に対して前記ベース部材が設けられている側とは反対側に設けられているとともに、前記光軸を中心とする前記保持部材の回転を抑制するための回転抑制ユニットと、
前記保持部材を前記ベース部材に対して前記光軸の方向へ付勢するための付勢部材とを備え、
前記光軸に垂直な面において、前記光軸を中心とする円周上に前記駆動ユニットの少なくとも一部と、前記回転抑制ユニットの少なくとも一部が位置しており、
前記付勢部材の前記光軸の方向における一端は前記回転抑制ユニットに接続されており、前記付勢部材の前記光軸の方向における他端は前記ベース部材に接続されており、
前記保持部材は、前記光軸に垂直な第1方向及び第2方向に移動可能であり、
前記回転抑制ユニットは、前記保持部材の前記第2方向への移動を可能にするとともに前記保持部材に対して前記ベース部材の側とは反対側に設けられた第1ガイド部材と、前記保持部材の前記第1方向への移動を可能にするとともに前記第1ガイド部材に対して前記保持部材の側とは反対側に設けられた第2ガイド部材とを有し、
前記光軸方向から見たとき、前記回転抑制ユニットと前記駆動ユニットは前記円周上の異なる領域に配置されていることを特徴とする。
図1を参照して、本発明の各実施例で示す振れ補正装置を用いたレンズ装置101及びレンズ装置101を装着可能なカメラ本体201を備えた撮像装置の構成について説明する。
交換レンズであるレンズ装置101は、フォーカシングのためには不動の固定レンズユニット102a及び102b、フォーカシングの際にレンズ装置101の光軸方向であるx軸方向に移動するフォーカスレンズユニット103を備えている。なお、ここでいうレンズユニットとは、1枚のレンズも複数のレンズの集合であるレンズ群も含む表現である。
カメラ本体201は、前述の撮像素子202、メインCPU203、操作部材のレリーズボタン204、主電源205、画像記録用メディア206を備えている。レリーズボタン204は2段押しの構成になっており、1段目をSW1、2段目をSW2と呼ぶ。SW1では、撮影スタンバイからの復帰や、手振れ補正開始、オートフォーカスの開始、測光の開始などの撮影開始準備の指示を行う。SW2では、撮影を行い画像記録用メディア206への画像の記録指示を行う。また、マウント111に設けられた不図示の接点ブロックを介して、主電源205からレンズ装置101への電力の供給や、メインCPU107及び203間の撮影情報のやり取りが行われる。
(防振ユニット300の構成)
次に本発明の第1実施例としての振れ補正装置である防振ユニット300の構成について、図2から図4を用いて説明する。図2は防振ユニット300の分解斜視図、図3は防振ユニット300を光軸方向から見たときの正面図、図4は防振ユニット300の断面図A及び断面図Aにおける部分拡大図である。
次に振れ補正レンズユニット105を光軸方向と直交するp方向及びy方向に移動させるための構成及びその原理について説明する。
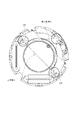
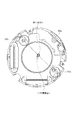
次に、シフト鏡筒301の光軸回りの回転(以下、単にロールという)を抑制するとともに、シフト鏡筒301のp方向及びy方向への移動を許容するための構成について図2及び図5から図8を用いて説明する。図5から図8は所定の部材を除いた防振ユニット300の構成を示す光軸方向視の図である。図5は上ヨーク306を除いた場合、図6はさらに第2ガイド部材311を除いた場合、図7はさらに第1ガイド部材310を除いた場合、図8はさらにシフト鏡筒301を除いた場合の防振ユニット300の構成をそれぞれ示している。
図7に示すように、シフト鏡筒301には第1ガイド溝部としてのガイド溝部301bが計2つ設けられており、図6に示すように、第1ガイド部材310には第2ガイド溝部としてのガイド溝部310aが計2つ設けられている。図6及び図7に示すように、ガイド溝部301bの長手方向及びガイド溝部310aの長手方向はy方向と平行になっている。
図6に示すように、第1ガイド部材310には第3ガイド溝部としてのガイド溝部310bが計2つ設けられており、図5に示すように、第2ガイド部材311には第3のガイド溝部としてのガイド溝部311aが計2つ設けられている。図5及び図6に示すように、ガイド溝部310bの長手方向及びガイド溝部311aの長手方向はp方向と平行になっている。
次に図2及び図5を用いて、シフト鏡筒301を光軸方向にベース部材302に対して付勢するための構成について説明する。図2に示すように、付勢部材である引張りばね312の一端はベース部材302が有する取り付け部302dに設けられており、他端は図5に示す第2ガイド部材311が有する取り付け部311cに設けられている。この結果、引張りばね312によって、第2ガイド部材311を第1ガイド部材310及びシフト鏡筒301に向かって光軸方向に付勢することができる。
次に図9から図12を用いて、引張りばね312によって発生する付勢力の伝達経路について説明する。図9は3つの第3ボール309の光軸方向視における重心を結ぶ三角形Aと2つの引張りばね312の合力Aの関係図である。図10は第1ガイド部材310及びシフト鏡筒301にかかる合力B及び2つの第2ボール308b及び308cを結ぶ線分の中点である点Bの説明図である。図11はシフト鏡筒301にかかる合力Bとシフト群重心Aの関係図であり、図12は3つの第1転動ボール307の重心を結ぶ三角形Bと合力Bの関係図である。
次に、図13及び図14を参照して、上記の本実施例における防振ユニット300において、従来よりも径方向に小型化を可能としている構成について説明する。
仮に駆動ユニット及び回転抑制ユニットが図13における第1の範囲あるいは第2の範囲に設けられている場合には、光軸直交方向視において駆動ユニットと回転抑制ユニットの光軸方向の位置が互いに異なることになる。その結果、振れ補正ユニット105が光軸方向に大型化してしまうため、駆動ユニットと回転抑制ユニットが同じ範囲に設けられていることは好ましくない。このような構成に対して、本実施例の防振ユニット300は次に説明する構成を有することで、光軸方向の大型化を抑制している。
図16から図19を参照して、第2実施例としての防振ユニット300の構成を説明する。前述の第1実施例と本実施例との違いは、第1付勢部材としての2つの引張りばね312に加えて、第2付勢部材として引張りばね403を新たに設けた点である。
前述の第1実施例では振れ補正レンズユニット105の径が大きく、シフト群重心Aが振れ補正レンズユニット105の光軸に近い。しかしながら、振れ補正レンズユニットの径が小さくて軽い場合、シフト鏡筒に固定される駆動コイル側へシフト群の重心が寄る。その結果、合力Bとシフト群重心の位置ずれが前述の第1実施例よりも大きくなり、シフト鏡筒301が衝撃を受けた際に倒れ易くなってしまう。
図16及び図17を参照して防振ユニット400の構成について説明する。図16は防振ユニット400の斜視図、図17は防振ユニット400の部品配置説明図である。なお、以後の説明においては第1実施例と異なる部分のみ説明を行い、その他の箇所については第1実施例と同様であるため説明を省略する。
次に図18及び図19を用いて、引張りばね312及び引張りばね403によって発生する付勢力の伝達経路について説明する。図18はシフト鏡筒401にかかる合力B及び合力Cとシフト群重心Bの関係図であり、図19は三角形Bと合力Cの関係図である。
本実施例においても前述の第1実施例と同様に、従来よりも小型な振れ補正装置を実現することができる。
以上、本発明の好ましい実施例について説明したが、本発明は、これらの実施例に限定されず、その要旨の範囲内で種々の変形および変更が可能である。
300 防振ユニット(振れ補正装置)
301 シフト鏡筒(レンズ保持部材)
302、402 ベース部材
303p 駆動コイル(駆動ユニットの一部)
303y 駆動コイル(駆動ユニットの一部)
304p マグネット(駆動ユニットの一部)
304y マグネット(駆動ユニットの一部)
305 下ヨーク(駆動ユニットの一部)
306 上ヨーク(駆動ユニットの一部)
308b 第2ボール(回転抑制ユニットの一部)
308c 第2ボール(回転抑制ユニットの一部)
309b 第3ボール(回転抑制ユニットの一部)
309c 第3ボール(回転抑制ユニットの一部)
310 第1ガイド部材(回転抑制ユニットの一部)
311 第2ガイド部材(回転抑制ユニットの一部)
401 シフト鏡筒(レンズ保持部材)
410 振れ補正レンズ(レンズユニット)
Claims (14)
- ベース部材と、
レンズユニットを保持するとともに、該レンズユニットの光軸に垂直な方向への移動が可能な保持部材と、
前記保持部材を移動させるための駆動ユニットと、
前記光軸の方向において前記保持部材に対して前記ベース部材が設けられている側とは反対側に設けられているとともに、前記光軸を中心とする前記保持部材の回転を抑制するための回転抑制ユニットと、
前記保持部材を前記ベース部材に対して前記光軸の方向へ付勢するための付勢部材とを備え、
前記光軸に垂直な面において、前記光軸を中心とする円周上に前記駆動ユニットの少なくとも一部と、前記回転抑制ユニットの少なくとも一部が位置しており、
前記付勢部材の前記光軸の方向における一端は前記回転抑制ユニットに接続されており、前記付勢部材の前記光軸の方向における他端は前記ベース部材に接続されており、
前記保持部材は、前記光軸に垂直な第1方向及び第2方向に移動可能であり、
前記回転抑制ユニットは、前記保持部材の前記第2方向への移動を可能にするとともに前記保持部材に対して前記ベース部材の側とは反対側に設けられた第1ガイド部材と、前記保持部材の前記第1方向への移動を可能にするとともに前記第1ガイド部材に対して前記保持部材の側とは反対側に設けられた第2ガイド部材とを有することを特徴とする振れ補正装置。 - 前記駆動ユニットは、前記保持部材を前記光軸に垂直な第1方向に移動させるための第1駆動ユニットを有し、該第1駆動ユニットは、前記保持部材により保持された第1コイルと、該第1コイルに対して前記ベース部材の側に設けられた第1マグネット対と、前記第1コイルに対して前記ベース部材の側とは反対側に設けられた第2マグネット対とを含むことを特徴とする請求項1に記載の振れ補正装置。
- 前記駆動ユニットは、前記保持部材を前記光軸に垂直な第2方向に移動させるための第2駆動ユニットを有し、該第2駆動ユニットは、前記保持部材により保持された第2コイルと、該第2コイルに対して前記ベース部材の側に設けられた第3マグネット対と、前記第2コイルに対して前記ベース部材の側とは反対側に設けられた第4マグネット対とを含むことを特徴とする請求項2に記載の振れ補正装置。
- 前記光軸の方向において互いに異なる位置に設けられた第1ヨーク及び第2ヨークを備え、前記第1及び第2コイルと、前記第1乃至第4マグネット対とは、前記第1ヨークと前記第2ヨークとの間に配置されていることを特徴とする請求項3に記載の振れ補正装置。
- 前記光軸に垂直な方向から見たとき、前記第1ヨークから前記第2ヨークまでの距離と同じ幅をもつ領域内に、前記回転抑制ユニットの少なくとも一部が配置されていること特徴とする請求項4に記載の振れ補正装置。
- 前記保持部材は、前記第1ガイド部材に対する前記第2方向への移動が許容されるとともに、前記第1ガイド部材に対する前記第1方向への移動は抑制されており、
前記第1ガイド部材は、前記第2ガイド部材に対する前記第1方向への移動が許容されるとともに、前記第2ガイド部材に対する前記第2方向への移動は抑制されていることを特徴とする請求項1乃至5のいずれか一項に記載の振れ補正装置。 - 前記保持部材には、前記第2方向に伸びる第1ガイド溝部が設けられており、
前記第1ガイド部材には、前記第2方向に伸びる第2ガイド溝部及び前記第1方向に伸びる第3ガイド溝部が設けられており、
前記第2ガイド部材には、前記第1方向に伸びる第4ガイド溝部が設けられており、
前記保持部材と前記ベース部材との間には複数の第1転動部材が設けられており、
前記第1ガイド溝部と前記第2ガイド溝部との間には第2転動部材が設けられており、
前記第3ガイド溝部と前記第4ガイド溝部との間には第3転動部材が設けられていることを特徴とする請求項1乃至6のいずれか一項に記載の振れ補正装置。 - 前記第2方向に伸びる第1ガイド溝部を有するとともに前記保持部材と前記第1ガイド
部材との間に設けられた第3ガイド部材を備え、
前記第1ガイド部材には、前記第2方向に伸びる第2ガイド溝部及び前記第1方向に伸びる第3ガイド溝部が設けられており、
前記第2ガイド部材には、前記第1方向に伸びる第4ガイド溝部が設けられており、
前記保持部材と前記ベース部材との間には複数の第1転動部材が設けられており、
前記第1ガイド溝部と前記第2ガイド溝部との間には第2転動部材が設けられており、
前記第3ガイド溝部と前記第4ガイド溝部との間には第3転動部材が設けられていることを特徴とする請求項1乃至6のいずれか一項に記載の振れ補正装置。 - 前記第1ガイド部材と前記ベース部材との間には、前記第2転動部材とは異なる第2転動部材が設けられていることを特徴とする請求項8に記載の振れ補正装置。
- 前記第1ガイド部材と前記第2ガイド部材との間には、前記第3転動部材とは異なる第3転動部材が設けられていることを特徴とする請求項8又は9に記載の振れ補正装置。
- 前記光軸の方向から見たとき、前記レンズユニットを通るとともに前記駆動ユニット及び前記回転抑制ユニットを通らない直線に対して、前記駆動ユニットは一方の側に設けられており、前記回転抑制ユニットは他方の側に設けられていることを特徴とする請求項1乃至10のいずれか一項に記載の振れ補正装置。
- 前記付勢部材は、前記他方の側において互いに異なる位置に設けられた第1付勢部材と第2付勢部材を有することを特徴とする請求項11に記載の振れ補正装置。
- 前記付勢部材は、前記一方の側に設けられた第3付勢部材をさらに有し、
前記第3付勢部材の付勢力は、前記第1付勢部材の付勢力及び前記第2付勢部材の付勢力よりも小さいことを特徴とする請求項12に記載の振れ補正装置。 - 請求項1乃至13のいずれか一項に記載の振れ補正装置と、
該振れ補正装置からの光を受光する撮像素子とを備えることを特徴とする撮像装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016254217A JP6833504B2 (ja) | 2016-12-27 | 2016-12-27 | 振れ補正装置およびこれを用いたレンズ装置、撮像装置 |
| US15/847,782 US10768436B2 (en) | 2016-12-27 | 2017-12-19 | Image shake correction unit, lens apparatus using the same, and image pickup apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016254217A JP6833504B2 (ja) | 2016-12-27 | 2016-12-27 | 振れ補正装置およびこれを用いたレンズ装置、撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018106071A JP2018106071A (ja) | 2018-07-05 |
| JP2018106071A5 JP2018106071A5 (ja) | 2020-02-06 |
| JP6833504B2 true JP6833504B2 (ja) | 2021-02-24 |
Family
ID=62629668
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016254217A Active JP6833504B2 (ja) | 2016-12-27 | 2016-12-27 | 振れ補正装置およびこれを用いたレンズ装置、撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10768436B2 (ja) |
| JP (1) | JP6833504B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6883467B2 (ja) * | 2017-05-08 | 2021-06-09 | 日本電産サンキョー株式会社 | 振れ補正機能付き光学ユニット |
| JP6800911B2 (ja) * | 2018-04-17 | 2020-12-16 | キヤノン株式会社 | 振れ補正装置並びにこれを備えるレンズ装置およびカメラシステム |
| JP7327997B2 (ja) * | 2019-05-16 | 2023-08-16 | キヤノン株式会社 | 光学装置および光学機器 |
| JP7346113B2 (ja) * | 2019-07-11 | 2023-09-19 | キヤノン株式会社 | 振れ補正装置及びこれを備えるレンズ装置、カメラシステム |
| CN112804422B (zh) * | 2020-12-28 | 2022-04-15 | 维沃移动通信有限公司 | 电子设备及其摄像头模组 |
| CN113079288A (zh) * | 2021-03-26 | 2021-07-06 | 维沃移动通信有限公司 | 摄像装置和电子设备 |
| JP7830179B2 (ja) * | 2022-03-17 | 2026-03-16 | キヤノン株式会社 | 光学シフト装置および光学機器 |
| JP2023167315A (ja) | 2022-05-11 | 2023-11-24 | キヤノン株式会社 | 駆動装置及びそれを有するレンズ装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001215543A (ja) * | 2000-01-31 | 2001-08-10 | Canon Inc | 振れ補正装置 |
| JP4750402B2 (ja) * | 2004-11-01 | 2011-08-17 | キヤノン株式会社 | 光学機器 |
| TWI298805B (en) * | 2005-02-15 | 2008-07-11 | Sony Corp | Lens unit and imaging apparatus |
| JP4829803B2 (ja) * | 2007-01-26 | 2011-12-07 | キヤノン株式会社 | 光学防振装置及び光学機器 |
| JP4804564B2 (ja) * | 2009-07-14 | 2011-11-02 | キヤノン株式会社 | 振れ補正装置を有する光学機器 |
| JP5645517B2 (ja) | 2010-07-15 | 2014-12-24 | キヤノン株式会社 | 振れ補正装置及び撮像装置 |
| JP5693163B2 (ja) * | 2010-11-11 | 2015-04-01 | キヤノン株式会社 | 振れ補正装置、レンズ鏡筒、及び光学機器 |
| JP5791301B2 (ja) | 2011-02-15 | 2015-10-07 | キヤノン株式会社 | 像振れ補正装置および光学機器 |
| JP2013003332A (ja) | 2011-06-16 | 2013-01-07 | Canon Inc | 像振れ補正装置および光学機器 |
| JP2017083582A (ja) * | 2015-10-26 | 2017-05-18 | Hoya株式会社 | 撮像装置 |
-
2016
- 2016-12-27 JP JP2016254217A patent/JP6833504B2/ja active Active
-
2017
- 2017-12-19 US US15/847,782 patent/US10768436B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018106071A (ja) | 2018-07-05 |
| US10768436B2 (en) | 2020-09-08 |
| US20180180899A1 (en) | 2018-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6833504B2 (ja) | 振れ補正装置およびこれを用いたレンズ装置、撮像装置 | |
| CN101231444B (zh) | 光学图像稳定器和光学装置 | |
| JP5430074B2 (ja) | 光学機器およびそれを備えた撮像装置 | |
| JP3946757B2 (ja) | 撮像装置 | |
| US20120081559A1 (en) | Image-shake correction device, lens barrel, and optical apparatus | |
| JP2011022250A (ja) | 振れ補正装置を有する光学機器 | |
| JP3858308B2 (ja) | ブレ補正装置、ブレ補正装置を有するレンズ鏡筒及びブレ補正装置を有するカメラ | |
| JP5614005B2 (ja) | レンズ鏡筒および撮像装置 | |
| JP6444238B2 (ja) | 駆動ユニット、レンズ鏡筒、及び光学機器 | |
| JP2011158924A (ja) | 振れ補正装置を有する光学機器 | |
| JP2008209435A (ja) | ブレ補正装置及び光学装置 | |
| JP2013140309A (ja) | 振れ補正装置、レンズ鏡筒、および光学機器 | |
| JP6789734B2 (ja) | 像ブレ補正装置、レンズ装置、および、撮像装置 | |
| JP5820667B2 (ja) | 光学式像振れ補正機構 | |
| JP2011039103A5 (ja) | ||
| JP2013088684A (ja) | 振れ補正装置、レンズ鏡筒、および光学機器 | |
| JP2016184132A (ja) | 光学駆動装置および光学機器 | |
| JP5817265B2 (ja) | 光学装置及びカメラ | |
| JP2010039083A (ja) | 光学防振装置及び光学機器 | |
| JP6057510B2 (ja) | 像振れ補正装置およびそれを備えた光学機器、撮像装置 | |
| JP4336698B2 (ja) | アクチュエータ、及びそれを備えたレンズユニット、カメラ | |
| JP7346113B2 (ja) | 振れ補正装置及びこれを備えるレンズ装置、カメラシステム | |
| JP2013125230A5 (ja) | ||
| JP2018105899A (ja) | 像振れ補正装置及びそれを用いた光学機器 | |
| JP2008065073A (ja) | アクチュエータ、及びそれを備えたレンズユニット、カメラ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191217 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191217 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201013 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210203 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6833504 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |