JP6732894B2 - マルチモーションプラットフォームパラレルロボットの構築方法およびそのパラレルロボット - Google Patents
マルチモーションプラットフォームパラレルロボットの構築方法およびそのパラレルロボット Download PDFInfo
- Publication number
- JP6732894B2 JP6732894B2 JP2018513710A JP2018513710A JP6732894B2 JP 6732894 B2 JP6732894 B2 JP 6732894B2 JP 2018513710 A JP2018513710 A JP 2018513710A JP 2018513710 A JP2018513710 A JP 2018513710A JP 6732894 B2 JP6732894 B2 JP 6732894B2
- Authority
- JP
- Japan
- Prior art keywords
- branch
- motion
- pair
- platform
- parallel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images























































































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/003—Programme-controlled manipulators having parallel kinematics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/50—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism
- B23Q1/54—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only
- B23Q1/545—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces
- B23Q1/5456—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces with one supplementary rotating pair
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/50—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism
- B23Q1/54—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only
- B23Q1/545—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces
- B23Q1/5462—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces with one supplementary sliding pair
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q5/00—Driving or feeding mechanisms; Control arrangements therefor
- B23Q5/22—Feeding members carrying tools or work
- B23Q5/28—Electric drives
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/106—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links
- B25J9/1065—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links with parallelograms
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Description
ベーシックファンデーションプラットフォームと、ベーシックモーションプラットフォームと、ベーシックファンデーションプラットフォームとベーシックモーションプラットフォームを連結し、それぞれ2つ以上の広義モーションペアが直列に連結されてなったN2(2≦N2≦6)個のメイン分岐チェーンとを含む、1つのベーシックパラレル機構(生成素子とも言う)と、
ブランチファンデーションプラットフォームと、ブランチモーションプラットフォームと、ブランチファンデーションプラットフォームとブランチモーションプラットフォームを連結したN2(2≦N2≦6)個のブランチ分岐チェーンとを含む、N1(N1≧1)個のブランチパラレル機構と、からなり、
それぞれのパラレル機構がN2(2≦N2≦6)個の同一な自由度および同一な自由度性質を有しており、
当該構築方法は、
1)ベーシックパラレル機構を構築するステップと、
さらに、ベーシックパラレル機構11は、
(a)ベーシックファンデーションプラットフォームは平面ファンデーションプラットフォームであることと、
(b)それぞれのメイン分岐チェーンにおける1つ目の広義モーションペアが主動ペアであって、メイン分岐チェーン毎に主動ペアが1つしかおらず、メイン分岐チェーンにおける1つ目のモーションペアの入力端が転動ペアまたは移動ペアであることと、
(c)1つ目の広義モーションペアの入力端の軸線がファンデーションプラットフォームの平面に対して平行であり、重なり合いまたは垂直であることと、
(d)そのメイン分岐チェーンにおける前から2つまたは3つの広義モーションペアのうち、少なくとも1つの広義モーションペアが出力拡大可能なモーションペアであることと、
(e)ベーシックモーションプラットフォームがベーシックファンデーションプラットフォームの平面の一側に位置し、または、ベーシックファンデーションプラットフォームの平面と面一にし、メイン分岐チェーンにおいて、出力拡大可能なモーションペアがベーシックモーションプラットフォームと連結された部分は下流メイン分岐チェーンと言うことと
の5つ条件に適合しており、
(ベーシックファンデーションプラットフォーム、広義モーションペア、出力拡大可能なモーションペアに関する詳細は、下記の「ベーシックファンデーションプラットフォーム、広義モーションペア、出力拡大可能なモーションペアに関する説明」を参照する)
2)ブランチパラレル機構を構築するステップと、
下記の3ステップを含む:
a)対称マルチ(ダブル)出力モーションペア(以下はまとめてマルチ出力モーションペアと言う)およびブランチファンデーションプラットフォームを選択して構築する:
ベーシックパラレル機構のそれぞれのメイン分岐チェーンに、1つの拡大可能なモーションペアを選択し、この拡大可能なモーションペアは分界モーションペアとも言い、この拡大可能なモーションペアに1つの出力端を増やし、この出力端はサブ出力端と言い、元の出力端はメイン出力端と言い、計N1個のサブ出力端を増やし、サブ出力端の機能をメイン出力端の機能と同一にし、構造を対称にし、対称は、並進対称、回転対称、反射対称およびスライド反射対称に加え、自己相似性(self-similarity)(クロススケール対称)をさらに含んでおり、
この拡大可能なモーションペアが元の広義モーションペアよりも出力端の1つ多いマルチ出力モーションペア(ダブル出力モーションペアを含む)になり、メイン分岐チェーンにおいて、分界広義モーションペアがブランチモーションプラットフォームと連結された部分は下流ブランチ分岐チェーン14と言い、分界モーションペアおよび残りの部分は上流メイン分岐チェーンと言っており、
ブランチ分岐チェーンの下端点がブランチ分岐チェーンとブランチファンデーションプラットフォームとのヒンジポイントであり、N2個のブランチ分岐チェーンのヒンジポイントがブランチファンデーションプラットフォームを構成し、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームの形状を同一、類似またはほぼ同一にし、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームを対称にし、対称は、並進対称、回転対称、反射対称およびスライド反射対称に加え、クロススケール対称をさらに含む。
新たに増やしたサブ出力端毎に、一つのサブブランチ分岐チェーンまたはサブブランチロッド(以下、サブブランチ分岐チェーンまたはサブブランチロッドをまとめてサブブランチ分岐チェーンと略称する)を連結し、このサブブランチ分岐チェーンとメイン分岐チェーン上の下流メイン分岐チェーンを同一またはほぼ同一にし、これらサブブランチ分岐チェーンがN2個のサブブランチ分岐チェーンのグループを形成し、サブブランチ分岐チェーンと下流メイン分岐チェーンを対称にし、対称は、並進対称、回転対称、反射対称、スライド反射対称およびクロススケール対称を含んでおり、
ブランチ分岐チェーンも2部分に分けられ、分界モーションペア(拡大可能なモーションペア)を境界に、分界モーションペアとブランチモーションプラットフォーム間の部分は下流ブランチ分岐チェーンと言い、ブランチ分岐チェーンの残りの部分は上流ブランチ分岐チェーンと言い、下流ブランチ分岐チェーンもサブブランチ分岐チェーンと言い、下流ブランチ分岐チェーンと上流ブランチ分岐チェーンがブランチ分岐チェーンを構成する。
c)ブランチモーションプラットフォームを連結する:
このグループのサブブランチ分岐チェーンの末端にブランチモーションプラットフォームを連結し、ブランチモーションプラットフォームとベーシックモーションプラットフォームの形状を同一、類似またはほぼ同一にし、ブランチモーションプラットフォームとベーシックモーションプラットフォームを対称にし、ベーシックパラレル機構と対称なブランチパラレル機構を形成し、ブランチモーションプラットフォームとベーシックモーションプラットフォームとの対称は、並進対称、回転対称、反射対称、スライド反射対称およびクロススケール対称を含む。
を含むマルチモーションプラットフォームパラレルロボットの構築方法。
1つのベーシックパラレル機構11と、N1(N1≧1)個のブランチパラレル機構とからなり、それぞれのパラレル機構がN2(2≦N2≦6)個の自由度および同一な自由度性質を有し、即ち、同一の自由度の数および同一の自由度の組合せを有し、
1)ベーシックパラレル機構は、以下のような構造である:
ベーシックパラレル機構(生成素子とも言う)は、ベーシックファンデーションプラットフォームと、ベーシックモーションプラットフォームと、ベーシックファンデーションプラットフォームとベーシックモーションプラットフォームを連結し、それぞれ2つ以上の広義モーションペアが直列に連結されてなったN2(2≦N2≦6)個のメイン分岐チェーンを含み、さらに、以下の5つの条件に適合する:
(a)ベーシックファンデーションプラットフォームは平面ファンデーションプラットフォームである。必要な場合、ベーシックファンデーションプラットフォームはB0で表す。
ブランチパラレル機構は、ブランチファンデーションプラットフォームと、ブランチモーションプラットフォームと、ブランチファンデーションプラットフォームとブランチモーションプラットフォームを連結したN2*N1個のブランチ分岐チェーンを含み、下記の構造特徴を有する:
(a)メイン分岐チェーンの出力拡大可能なモーションペアにおいて、サブ出力端毎に1つのサブブランチ分岐チェーンが連結され、分界モーションペアのサブ出力端とブランチモーションプラットフォーム間の部分は下流ブランチ分岐チェーンと言い、下流ブランチ分岐チェーンの部分もサブブランチ分岐チェーンと言い、サブブランチ分岐チェーンとメイン分岐チェーン上の下流メイン分岐チェーンが同一またはほぼ同一にされ、サブブランチ分岐チェーンと下流メイン分岐チェーンが対称にされ、対称は、並進対称、回転対称、反射対称、スライド反射対称及びクロススケール対称を含む。
1つ目の広義モーションペアの入力端の軸線は、ファンデーションプラットフォームの平面に対して垂直、および平行(重なり合うことを含む)する2種の形態のみがある。自由度が2のマルチモーションプラットフォームパラレルロボットまたは平面パラレル機構にとって、メイン分岐チェーンが2つあり、2つの主動ペアにおける入力端軸線の組合せ形態が簡単であり、3つの組合せがある:2つの軸線が同時にベーシックファンデーションプラットフォームの平面に対して垂直である;2つの軸線が同時にベーシックファンデーションプラットフォームの平面に対して平行であり、または重なり合う;2つの軸線の一方がベーシックファンデーションプラットフォームの平面に対して平行であり、または重なり合い、他方がベーシックファンデーションプラットフォームの平面に対して垂直である。但し、自由度が多いパラレル機構の場合、メイン分岐チェーンが多く、主動ペアが多いため、入力端軸線が数多くの組合せ形態を有する。一般的に、簡単且つ実用な形態をいくつか選択し、工程実践に適用する。例えば、軸線が星状の形態、軸線が同一円(楕円)または同一平面内の複数同心円の接線の形態、軸線が互いに平行であり、或いは、軸線が全部または一部重なり合う形態が挙げられる。以下はそれぞれ、いくつかの主な最適形態を説明する。
レッグAのベーシックパラレル機構がレッグAのベーシックファンデーションプラットフォームと、レッグAのメイン分岐チェーンと、レッグAのベーシックモーションプラットフォームのフットアーチとからなり、レッグBのベーシックパラレル機構がレッグBのベーシックファンデーションプラットフォームと、レッグBのメイン分岐チェーンと、レッグBのベーシックモーションプラットフォームのフットアーチとからなり、モーションプラットフォームのフットアーチそれぞれには足指があり、
2つのパラレルレッグ機構の配列方式は、下記方式のいずれか1種である。
ここで、大きい、小さいは、全体的な大きさも局所的な大きさも言い、例えば、2つのフットアーチの大きさ比較を言っても良い。
式L/cosθの中、
Lは、2つの隣り合う足指の中心点(足指中心点と略称する)からベーシックファンデーションプラットフォームの中心までの距離であり、
θは、足指中心点からベーシックファンデーションプラットフォームの中心まで連結線を引くと、この連結線とベーシックファンデーションプラットフォームの平面でなす角度である。
ベーシックパラレル機構の構造に応じて、ベーシックパラレル機構が平面ベーシックパラレル機構と空間ベーシックパラレル機構に分けられる。よって、ベーシックファンデーションプラットフォームは、以下のような2種がある。
広義モーションペアは、シングル出力モーションペアとマルチ(ダブル)出力モーションペアを含む。本文に記載のマルチ(ダブル)出力モーションペアとは、2つ以上の出力端を有し且つ出力端がある対称性を持つモーションペアのことを言い、以下、マルチ出力モーションペアと略称する。
ブランチ分岐チェーンの下端点がブランチ分岐チェーンとブランチファンデーションプラットフォームとのヒンジポイントである。N2個のブランチ分岐チェーンのヒンジポイントがブランチファンデーションプラットフォームを構成する。ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームの形状が同一、類似またはほぼ同一にされ、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームが対称にされ、対称は、一定対称、並進対称、回転対称、反射対称およびスライド反射対称に加え、クロススケール対称をさらに含む。
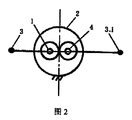
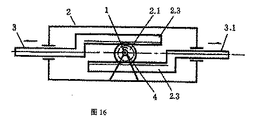
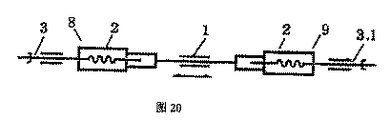
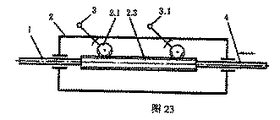
対称マルチ出力モーションペアは、本発明中の非常に重要な構造部材であり、新たな概念でもある。マルチ出力モーションペアが複合モーションペアの範疇に属する。本文に記載の個別のマルチ出力モーションペアについては、マルチペア部材と称する文献があり、実際に、それも複合モーションペアである。本文に記載の対称マルチ出力モーションペアは、1つまたは2つの入力端を有するとともに、2つ以上の出力端を有し且つ出力端がある対称性を持つ複合モーションペアである。通常の場合、対称マルチ出力モーションペアが1つの入力端を有し、個別の場合(2つのモーションペアが合併し応用された場合)、2つの入力端を有することになる。本文に記載の対称マルチ出力モーションペアは、一部が対称条件を追加した従来の複合モーションペアであり、一部が本発明のために特別に構造された新規なモーションペアであり、柔軟性モーションペア或いは柔順モーションペアで構成されたマルチ出力モーションペアを含み、以下は、マルチ出力モーションペアと略称する。マルチ出力モーションペアが入力端と、2つ以上の出力端と、入出力変換装置と、拡大可能なインターフェースと、接続装置とからなる。
以下、マルチ出力モーションペアの出力端の対称性に応じて、本発明に係る各種のマルチ(ダブル)出力モーションペアについて詳しく説明する。マルチ出力モーションペアはその出力端の対称性によって分類すると、反射対称系、並進対称系、回転対称系、スライド反射対称系およびクロススケール対称系がある。
分岐チェーンについて:本文に記載の分岐チェーンの数は、ファンデーションプラットフォームから引き出された分岐チェーンの数であり、主動ペアの数でもあり、主動分岐チェーンの数と言う。モーションプラットフォームに連結されたブランチ分岐チェーンの数が同一であってもよく、異なっても良い。モーションプラットフォームに連結されたブランチ分岐チェーンの数が主動分岐チェーンの数以下である。分岐チェーンは通常、モーションペアと連結ロッドからなる。ただし、各種の文献では、モーションペアのアルファベットで分岐チェーンを表す場合、連結ロッドを表示せず、アルファベットのみを書く習慣がある。本文では、この方式が採用される。
本発明に記載の対称がパラレルロボット機構学に定義する対称とは別の概念である。パラレルロボット機構学に定義する対称は、分岐チェーンが同一のパラレル機構を言うので、1つのパラレル機構自身に関する特性である。本発明に記載の対称は、ベーシックパラレル機構とブランチパラレル機構との関係、ベーシックモーションプラットフォームとブランチモーションプラットフォームとの関係、マルチ出力モーションペアのメイン出力端とサブ出力端との関係、下流メイン分岐チェーンとサブブランチ分岐チェーンとの関係を言い、実質的に、2つのパラレル機構の間の関係である。
本発明の基礎が適切な生成素子である。生成素子があれば、本発明による方法を用いると、全ての自由度組合せのパラレル機構(計57種)を生成することができる。57種の自由度組合せに、異なる分岐チェーンの構造、異なる対称方式を加えると、数多くのマルチモーションプラットフォームパラレルロボットを生成することになる。本文の実施例は、発明方法および発明の構造を正確かつ完全的に説明することを目的とする。明瞭かつ便利に表現するために、簡単過ぎるパラレル機構を生成素子として選択することがない。例えば、1−RS&1−RRR(1T1R)の自由度が2のパラレル機構が生成素子として用いられていない。一方、構造が複雑な4節足のパラレル機構が選択されていないのは、方法および構造に対する説明し難くなるためである。生成素子の選択上、2節足のパラレル機構および平面パラレル機構を適用することが多い。構造および方法を十分説明できる以上、構造があまり複雑にならない。実施例における生成素子に対する補足として、マルチ節足のパラレル機構を含む、下記のような典型的な生成素子をいくつか示す。
対称の性質に基づいて、新たに生成するブランチパラレル機構も生成素子として、新たなブランチパラレル機構を生成することができる。ブランチファンデーションプラットフォームもサブ出力端を引き出すことができる。例えば、実施例15では、右側のブランチパラレル機構をベーシックパラレル機構として、反射変換を行い、1つの反射ブランチパラレル機構を得ることができる。このブランチパラレル機構は、元のベーシックパラレル機構のスライド反射パラレル機構である。実施例20は、実施例2におけるブランチパラレル機構を90°回転変換して得られても良い。実施例12に対する説明を参照する。
1、主動ペアの統一および標準化:同一のマルチモーションプラットフォームパラレルロボットについて、主動ペアを同種のモーションペアとすることが最も好ましい。すると、製造および制御がより便利になり、標準化もし易くなる。同種のモーションペアではない場合、1つの変化式の出力モーションペアを直列に連結し、同一の入力モーションペアに変換しても良い。
マルチモーションプラットフォームパラレルロボットの作業過程は、実施例16(図73)における3T0R組み立てロボットを例に説明する。マルチモーションプラットフォームパラレルロボットは計1セットの駆動システム、1セットの制御システムを有し、同一のメイン分岐チェーンおよび同一のベーシックモーションプラットフォームを有する。決まった1つの目標位置について、運動学の数学モデルを適用し、ベーシックパラレル機構の主動ペア変位を算出し、この変位に従って、駆動システムが制御システムにより指令を出し、主動ペアが所定の位置に移動し、ベーシックモーションプラットフォームが目標位置に到達する。同時に、各ブランチモーションプラットフォームもそれぞれの目標位置に到達する。ブランチモーションプラットフォームでは、ベーシックモーションプラットフォームと同一の操作を実現する。パラレル工作機械の作業が組み立てロボットに類似する。
本発明は主に工業ロボットの分野に適用され、複数の操作目標に対する溶接、加工組立、運搬、塗装、検出、パレタイジング、プレス、フィルミング、擦り洗い、研磨およびレーザ加工などの複雑な作業を一回で完成することができる。
実施例1
実施例1(図58)は、1種目のベーシックパラレル機構が3-RRR(2T1R)とされた反射対称系の平面マルチモーションプラットフォームパラレルロボットであって、1つのベーシックパラレル機構11と1つのブランチパラレル機構11.1とからなる。ベーシックパラレル機構11がベーシックファンデーションプラットフォーム12と、メイン分岐チェーン13と、ベーシックモーションプラットフォーム15とを含む。ブランチパラレル機構11.1がブランチファンデーションプラットフォーム12.1と、ブランチ分岐チェーン13.1と、ブランチモーションプラットフォーム15.1とを含む。ベーシックファンデーションプラットフォーム12が直線式のファンデーションプラットフォームB0B0B0であり、ベーシックファンデーションプラットフォームの平面がベーシックパラレル機構の平面内にある。
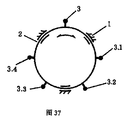
実施例2(図59)は、1種目のベーシックパラレル機構が3−PRR(2T1R)とされた反射対称系の平面対称ダブルプラットフォームパラレルロボットである。実施例1との相違点は主に、1つ目の広義モーションペアが異なり、前者が転動ペアである一方、後者が移動ペアであることにある。前者の転動ペア軸線がファンデーションプラットフォームの平面に対して垂直であり、後者の移動ペア軸線がファンデーションプラットフォームの平面内にある。実施例2は、主動ペア12.1の軸線が重なり合い、主動ペアが動的に組合せながら共に被られた3つの四角形パイプからなることを特徴とする。最も小さな四角形パイプが右側分岐チェーンの主動ペア12aであり、その両端が支持して1つの移動ペアを形成し、その右側上下にある2つの側面には、2つの反射対称な出力端3,3.1がある。中間の四角形パイプが短く、最も小さな四角形パイプの外に被られており、中間の四角形パイプが中間分岐チェーンの主動ペアであり、その右側上下にある2つの側面には、2つの反射対称な出力端3,3.1がある。最も大きな四角形パイプが最も短く、中間の四角形パイプの外に被られ、中間の四角形パイプが左側分岐チェーンの主動ペアであり、その右側上下にある2つの側面には、2つの反射対称な出力端3,3.1がある。3つの四角形パイプ軸線の上にある3つのメイン出力端3が3つの下流メイン分岐チェーン14(RR分岐チェーン)に連結され、3つの下流メイン分岐チェーン14が1つのベーシックモーションプラットフォーム15に連結される。3つの四角形パイプ軸線の下にある3つのサブ出力端3.1が3つのサブブランチ分岐チェーン14.1(RR分岐チェーン)に連結され、3つのサブブランチ分岐チェーン14.1が1つのブランチモーションプラットフォーム15.1に連結される。ブランチモーションプラットフォーム15.1とベーシックモーションプラットフォーム15が反射対称にされる。残りの特徴は、実施例1を参照し、再び説明しない。
実施例3(図60)は、2種目のメイン分岐チェーン13が全てRRR分岐チェーンとされた反射対称系の平面マルチモーションプラットフォームパラレルロボットである。実施例3は、実施例1の変形と見なしても良い。実施例1と比べると、二者の主な相違点は、ダブル出力モーションペアが異なることにある。前者が図1で示されたコンパス式の反射対称のダブル出力モーションペアであり、後者が図5で示された長尺式の反射対称のダブル出力モーションペアである。異なるダブル出力モーションペアによって、下にあるブランチパラレル機構が右向きに一段の距離で並進した構造変化が発生した。残りの特徴は、実施例1を参照し、再び説明しない。
実施例4(図61)は、3種目のメイン分岐チェーン13が全てRRR分岐チェーンとされた反射対称系の平面対称マルチモーションプラットフォーム対称パラレルロボットであり、実施例1の変形と見なしても良い。実施例1と比べると、二者の主な相違点は、ダブル出力モーションペアが異なることにある。前者に用いられるのはペアNO.1である一方、後者に用いられるのは一定対称のペアNO.48であり(図48)、モーションプラットフォームは二点線分式のモーションプラットフォームである。本例と実施例1の運動過程における対称が異なるものである。残りの特徴は、実施例1を参照し、再び説明しない。
実施例5(図62)は、分岐チェーンが全てPRR分岐チェーンとされた反射対称系の平面対称マルチプラットフォーム対称パラレルロボットであり、実施例2の変形と見なしても良い。実施例2と比べると、二者の主な相違点は、ダブル出力モーションペアの取付方式が異なり、主動ペアの軸線が異って配置されることにある。前者の移動ペアの軸線が重なり合い、出力端が左右運動する一方、後者の移動ペアの軸線が相互に平行であり、出力端が上下運動する。左側の隣り合う2つの分岐チェーンが逆V字状の分岐チェーングループを構成し、1つの複合ヒンジによりモーションプラットフォームに連結される。三点線分式のモーションプラットフォームが二点線分式のモーションプラットフォームになるが、二者が機能上で相違がないため、区別しない。本例と実施例1の運動過程における対称が異なるものである。残りの特徴は、実施例2を参照し、再び説明しない。
実施例6(図63)は、ベーシックパラレル機構が1−(RP)RR&1−PRR&1−RRR(2T1R)とされた反射対称系の平面マルチモーションプラットフォームパラレルロボットであり、1つのメイン分岐チェーンがそれぞれ異なる実施例である。それは、1つのベーシックパラレル機構と1つのブランチパラレル機構とからなり、ベーシックパラレル機構がベーシックファンデーションプラットフォーム12と、メイン分岐チェーン13と、ベーシックモーションプラットフォーム15とを含み、ブランチパラレル機構がブランチファンデーションプラットフォーム12.1と、ブランチ分岐チェーン13.1と、ブランチモーションプラットフォーム15.1とを含む。そのベーシックパラレル機構11が図中の点線の上にある。ベーシックファンデーションプラットフォーム12が直線式のファンデーションプラットフォームであり、ベーシックファンデーションプラットフォームの平面がベーシックパラレル機構の平面内にある。左側のメイン分岐チェーン(RH)RR中の(RH)が転動ペアと螺旋ペアを組み合わせてなる1つの複雑なモーションペアであり、(RH)が主動ペア12aで、(RH)中の転動ペアが主動ペアの入力端であり、その軸線がベーシックファンデーションプラットフォームの平面内にある。複雑なモーションペア(RH)がダブル出力モーションペアであり、そのメイン出力端3とサブ出力端3.1が反射対称にされる。そのメイン出力端3.1が下流メイン分岐チェーン14に連結され、下流メイン分岐チェーン14がRR分岐チェーンである。サブ出力端3.1が下流ブランチ分岐チェーン(サブブランチ分岐チェーン)14.1に連結され、下流ブランチ分岐チェーン14.1がRR分岐チェーンである。メイン分岐チェーンの上流部分が複雑なモーションペアRHであり、ブランチ分岐チェーンの上流部分も複雑なモーションペアRHである。
実施例7(図64)は、ベーシックパラレル機構が6−RSS(3T3R)とされた反射対称系の空間マルチモーションプラットフォームパラレルロボットであり、それは1つのベーシックパラレル機構11と1つのブランチパラレル機構11.1とからなる。ベーシックパラレル機構11が図107の上にあり、ブランチパラレル機構11.1が図107の下にある。
ブランチファンデーションプラットフォーム12.1とベーシックファンデーションプラットフォーム12が反射対称にされる。ダブル出力モーションペア16のサブ出力端3.1がサブブランチ分岐チェーン14.1に連結される。サブブランチ分岐チェーンもSS分岐チェーンである。ダブル出力モーションペア16の2つの出力端がファンデーションプラットフォームの平面に関して反射対称にされる。ブランチモーションプラットフォーム15.1がベーシックモーションプラットフォーム15と完全等しい六角形のモーションプラットフォームである。ブランチモーションプラットフォーム15.1とベーシックモーションプラットフォーム14が反射対称にされる。ファンデーションプラットフォームの平面の下にあるのは反射対称系のブランチパラレル機構11.1である。6つのブランチ分岐チェーン13.1が1つのブランチモーションプラットフォーム15.1に連結される。ブランチモーションプラットフォーム15.1とベーシックモーションプラットフォーム15が反射対称の関係を持っている。
実施例8(図65)は、メイン分岐チェーンがPSSとされた反射対称系の空間マルチモーションプラットフォームパラレルロボットである。そのベーシックパラレル機構11が6−PSS(3T3R)の空間自由度が6のパラレル機構である。
ベーシックファンデーションプラットフォーム12が平面ファンデーションプラットフォームであり、6つのメイン分岐チェーン13(PSS分岐チェーン)が1つのベーシックモーションプラットフォーム15に連結される。ベーシックパラレル機構がベーシックファンデーションプラットフォームの平面の上に位置され、移動ペアPが主動ペアであり、主動ペア12aの軸線がベーシックファンデーションプラットフォーム12の平面にあり、軸線がY字状(星状)になり、Y字状である3つのブランチ毎に2つの移動ペアを有し、1つが内側、1つが外側にある。移動ペア毎に2つの出力端を有し、上にある1つがメイン出力端3であり、下にある1つがサブ出力端3.1であって、2つの出力端が反射対称にされる。ファンデーションプラットフォームの平面の上には、6つのメイン出力端3があり、外側の3つのメイン出力端が3つの下流メイン分岐チェーン14に連結され、3つの下流メイン分岐チェーン14がベーシックモーションプラットフォーム15の三角形の頂点に連結されれる。内側の3つのメイン出力端が3つの下流メイン分岐チェーンに連結された後、3つの下流メイン分岐チェーンが1つの複合ボールペアによりベーシックモーションプラットフォーム15に連結され、複合ボールペアがベーシックモーションプラットフォーム15の三角形の中心に位置する。
実施例9
実施例9(図66)では、そのベーシックパラレル機構が3−RRR(2T1R)の平面パラレル機構であり、1つのベーシックパラレル機構11と1つのブランチパラレル機構11.1とからなる。ベーシックパラレル機構が図66の下にある。ブランチパラレル機構が図66の上にあり、全ての転動ペア軸線がファンデーションプラットフォームの平面に対して垂直である。
実施例10(図67)は、実施例9の変形である。実施例9におけるマルチ出力モーションペアは1つ目の広義モーションペアであり、下流メイン分岐チェーンおよびサブブランチ分岐チェーンが全てRR分岐チェーンであり、このサブブランチ分岐チェーンが大型ブランチ分岐チェーンである。実施例22におけるマルチ出力モーションペア16は、2つ目の広義モーションペアであり、下流メイン分岐チェーン14およびサブブランチ分岐チェーンが全てR分岐チェーンであり、このサブブランチ分岐チェーンが中型のブランチ分岐チェーンである。ベーシックパラレル機構11が図67の下にあり、ブランチパラレル機構11.1が図67の上にある。
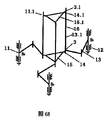
実施例11(図68)は、実施例9の別の変形である。実施例9におけるマルチ出力モーションペアは、1つ目の広義モーションペアである。実施例11におけるマルチ出力モーションペア16は、3つ目の広義モーションペアであり、下流メイン分岐チェーン14およびサブブランチ分岐チェーン14.1が全て1つのロッドであり、ロッドがモーションプラットフォームと連結される。このサブブランチ分岐チェーン14.1が小型ブランチ分岐チェーンであって、1つのロッド(図中では、モーションプラットフォームに直接連結されている)である。ベーシックパラレル機構が図68の下にあり、ブランチパラレル機構が図68の上にある。
実施例12(図69)は、1つのベーシックパラレル機構が3つのブランチパラレル機構を有する例である。メイン分岐チェーンにおける3つのモーションペアが全て拡大可能なモーションペアであって、マルチ出力モーションペアであり、いずれも分岐チェーンが引き出される。これは、実施例9、10、11をまとめた結果である。3つのブランチパラレル機構がベーシックパラレル機構と並進対称にされる。
実施例13(図70)は、1種目のベーシックパラレル機構が3−PRR(2T1R)とされた並進対称系の平面対称ダブルモーションプラットフォームパラレルロボットであり、1つのベーシックパラレル機構11と1つのブランチパラレル機構11.1とからなる。ベーシックパラレル機構がベーシックファンデーションプラットフォーム12と、メイン分岐チェーン13と、ベーシックモーションプラットフォーム16とを含む。ブランチパラレル機構がブランチファンデーションプラットフォーム12.1と、ブランチ分岐チェーン13.1と、ブランチモーションプラットフォーム15.1とを含む。
実施例14(図71)は、別のベーシックパラレル機構(生成素子)が3−PRR(2T1R)とされた平面パラレル機構である。実施例14は実質的に実施例13と同一にされる。それらの相違点は、主動ペア軸線の重なり合いを実現する方法が異なることにある。図71の左下側にあるパラレル機構はベーシックパラレル機構であり、右上側にあるパラレル機構はブランチパラレル機構である。3つの主動ペアは、以下のような構造である。図中の下にある3つの移動ペアが5つの円柱ペアからなる。中間にある円柱ペアが1つの移動ペアとされ、他の2つの移動ペアが2つの平行な円柱ペアからなり、その軸線が2つの円柱ペアの対称軸である。最も外側にある2つの円柱ペアはそれぞれ、ベーシックパラレル機構の一端に、円柱ペアの軸線に対して垂直でありかつ共線する1つの転動ペアを有し、同一の軸線を有する2つの転動ペアが1つのロッドに連結され、1つの移動ペアを形成する。他の2つの円柱ペアはそれぞれ、ベーシックパラレル機構の一端に、円柱ペアの軸線に対して垂直でありかつ共線する1つの転動ペアを有し、同一の軸線を有する2つの転動ペアが1つの杆件と連結され、1つの移動ペアを形成する。残りの特徴については、実施例2を参照する。
実施例15(図72)は、ベーシックパラレル機構が3−(RGR)RR(2T1R)パラレル機構とされたマルチモーションプラットフォーム対称平面パラレル機構であり、図72の左側にあるのはベーシックパラレル機構である。これは実施例9の変形である。実施例9のベーシックパラレル機構が3−RRR(2T1R)パラレル機構であり、その主動ペア軸線がベーシックファンデーションプラットフォームの平面に対して垂直である。実施例15は、メイン分岐チェーンの1つ目のモーションペアが元の簡単なモーションペア(転動ペア)から方向変化式の複雑なモーションペア(RGR)(ペアNO.25参照)になった点で相違し、(RGR)の括弧は、その内の機構が1つの全体として1つのモーションペアとなる意味をする。メイン分岐チェーン入力端の軸線が元のファンデーションプラットフォームの平面に対して垂直なものからファンデーションプラットフォームの平面に対し重なり合い且つ相互に平行であるようになる。すると、ベーシックファンデーションプラットフォームの平面において並進変換を行い、並進対称のブランチパラレル機構を生成することが可能になる。
実施例16(図73)は、ベーシックパラレル機構が3−RGR)(4S)(3T0R)の空間パラレル機構とされ、2つのブランチパラレル機構を有するマルチモーションプラットフォームパラレルロボットである。このベーシックパラレル機構11は実際に改良したDelta機構である。元のDelta機構では、1つ目のモーションペアの軸線が1つの三角形の辺と重なり合い、反射対称のベーシックパラレル機構とし、構造をまとめて反射対称のダブルプラットフォームパラレルロボットを得ることができるが、並進対称変換を行うことができない。元のDelta機構の1つ目のモーションペア(転動ペア)を方向変化式の複雑なモーションペア(RGR)にし、方向変化式の複雑なモーションペア(RGR)の入力端軸線を相互に平行させ、出力端軸線を元のDelta機構の入力端軸線と重なり合わせ、元のDelta機構の構造をそのまま維持すると、変更後のDelta機構は本例における並進対称変換のベーシックパラレル機構としても良い。
図73の下にあるのはベーシックパラレル機構(3−(RGR)(4S))11である。1つ目の広義モーションペアは1つの方向変化式の複雑なマルチ出力モーションペア(RGR)16であり、ペアNO.24、図24を参照する。方向変化式の複雑なモーションペア(RGR)16が主動ペアである。主動ペアの入力端12aの軸線がファンデーションプラットフォーム12の平面に対して平行でありかつ相互に平行である。方向変化式の複雑なモーションペア(RGR)の入力端軸線が延長し、この軸線の方向に並進対称変換を行い、1つのサブ出力端3.1を生成する。方向変化式の複雑なモーションペア(RGR)ごとに、同一の並進対称変換を行い、3つのサブ出力端3.1を生成し、3つのサブ出力端が1つのDelta機構に連結され、このDelta機構はサブ出力端3.1が位置する方向変化式の複雑なモーションペアとともに1つのブランチパラレル機構11.1(図73の中間にあるパラレル機構)を形成し、ブランチパラレル機構11.1とベーシックパラレル機構11が並進対称にされる。1つ目のブランチパラレル機構11.1の生成方法に従って、同一の並進変換を行うことで、2つ目のブランチパラレル機構11.2が得られる。
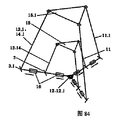
実施例17(図74)は、1種目のベーシックパラレル機構が6−PSS(3T3R)とされた反射対称系の空間マルチモーションプラットフォームパラレルロボットである。そのベーシックパラレル機構が6−SS(3T3R)の空間パラレル機構である。それは、1つのベーシックパラレル機構11と2つのブランチパラレル機構11.1とからなり、ベーシックパラレル機構11が図74の下にあり、2つのブランチパラレル機構11.1が図74の中間および上にある。
実施例18(図75)では、ベーシックパラレル機構11が6−RSS(3T3R)の空間パラレル機構である。ベーシックファンデーションプラットフォーム12が平面六角形のファンデーションプラットフォーム(B0B0B0B0B0B0)であり、メイン分岐チェーン13がRSS分岐チェーンであり、ベーシックモーションプラットフォーム15が平面三角形のモーションプラットフォームであり、ペアRが主動ペア12aであり、主動ペアの軸線がファンデーションプラットフォームの平面内にありかつ相互に平行である。ペアRがマルチ出力モーションペアであり、出力端が並進対称にされる。図75の左側で、ベーシックファンデーションプラットフォームの水平面の下にあるのはベーシックパラレル機構11である。図75の右側で、ファンデーションプラットフォームの水平面の下にあるのはブランチパラレル機構11.1である。ブランチファンデーションプラットフォームも平面六角形のファンデーションプラットフォーム(B1B1B1B1B1B1)である。図中の基本的符号が前記と同一であり、構造は実施例17を参照し、再び説明しない。
実施例19(図76)では、ベーシックパラレル機構が4−PSS&1−PU*Uとされた自由度が5(3T2R)の横式パラレル工作機械ロボットである。メイン分岐チェーンは、PSS分岐チェーンおよびPU*U分岐チェーンの2種がある。ベーシックファンデーションプラットフォーム12が平面ファンデーションプラットフォームである。メイン分岐チェーン13はそれぞれ4つのPSS分岐チェーン13および1つのPU*U分岐チェーン13aである。主動ペア12aが移動ペアである。主動ペアの軸線が相互に平行でありかつ1つの平面内にある。PU*U分岐チェーンの移動ペアが他4つの主動ペアの中間に位置する。主動ペアの軸線がベーシックファンデーションプラットフォームの平面と面一にする。移動ペアが並進対称系のマルチ出力モーションペア16であり、ベーシックモーションプラットフォーム15が五角形のモーションプラットフォームである。図の左下にあるのはベーシックパラレル機構11である。図の右上にあるのはブランチパラレル機構11.1である。ブランチパラレル機構の中間にあるブランチ分岐チェーンがPU*Uブランチ分岐チェーン13a.1およびサブブランチ分岐チェーン14a.1である。ベーシックモーションプラットフォームには、パーツのエッジを検知するために、センサまたはプローブ18が取り付けられる。ブランチモーションプラットフォームには、操作ハンド17が取り付けられる。ベーシックパラレル機構とブランチパラレル機構が並進対称にされる。図中の基本的符号が前記と同一にされ、再び説明しない。これはプロファイリングパラレル工作機械ロボットであり、セキュリティーパラレル工作機械ロボットとしても良い。
実施例20
実施例20(参照図59)は、ベーシックパラレル機構が3-PRR(2T1R)の平面パラレル機構とされる。ベーシックパラレル機構が実施例2と完全に同一にされる。実際に、実施例2も回転対称系のマルチモーションプラットフォームパラレルロボットであり、それはベーシックパラレル機構を移動ペアの軸線まわりに180°回転させて得たものである。本例では、ブランチパラレル機構がもう1つ増え、各四角形パイプの同一の側面には、元の出力端と90°回転し対称になった所で1つの新たなサブ出力端が引き出され、3つのサブ出力端にサブブランチ分岐チェーンが連結され、3つのサブブランチ分岐チェーンが1つのブランチモーションプラットフォームに連結され、ブランチモーションプラットフォームとベーシックモーションプラットフォームが回転対称にされる。1つの新たなブランチパラレル機構が得られ、新たなブランチパラレル機構がベーシックパラレル機構と回転対称にされ、元のブランチパラレル機構とともに、2つのブランチパラレル機構を備える1つの対称トリプルモーションプラットフォームパラレルロボットを生成する。
実施例21(図77)では、ベーシックパラレル機構が3−PRR(2T1R)の平面パラレル機構である。それは実施例14(図71)と同一の生成素子を有する。実施例21は実施例14をもとに変形して得るものである。実施例21は、以下の方式により得られる。1、実施例14における移動ペアの軸線が延長し、2つの同様なブランチパラレル機構11.2,11.3を更に増やし、元のブランチパラレル機構11.1に加えて、対称クゥアドラプルモーションプラットフォームパラレルロボットにする。隣り合う2つのパラレル機構の距離がπD/4であり、移動ペアの軸線の長さがπDである。ファンデーションプラットフォームの平面の下には主動ペアの軸線に垂直な直線Oaが引かれ、この直線を軸に、ファンデーションプラットフォームの平面が半径がD/2である円柱に囲まれ、5つの円柱ペアの軸線が連結されて5つのリングになる。4つのパラレル機構が円柱の外側に位置し、1つの回転対称のマルチモーションプラットフォームパラレルロボットを得る。4つのパラレル機構はそれぞれ90°の扇形スペースを占める。図77は、実施例21が軸線Oa方向に沿った平面図である。
実施例22(図78)では、ベーシックパラレル機構が6−PSS(3T3R)のパラレル機構である。実施例22は、実施例17を変形してなるものである。実施例17における主動ペアの軸線がさらに延長し、3つのブランチパラレル機構をさらに増やし、計6つのパラレル機構になる。隣り合う2つのパラレル機構の距離がπD/6であり、移動ペア軸線の総長さがπDである。6つの移動ペアの一側には、ファンデーションプラットフォームの平面に垂直な直線が引かれ、この直線を軸に、内側にある移動ペアの軸線が半径がD/2である円に囲まれ、他5つの移動ペアの軸線も5つの円に囲まれる。6つの円の間では、元々軸線が平行であった時の距離が維持され、1つの回転対称の対称へクスタプラットフォームパラレルロボットを得る。6つのパラレル機構が6つの扇形領域に位置する。6つのパラレル機構はそれぞれ60°の扇形空間を占める。図78は、実施例22の平面図である。変形の後、ファンデーションプラットフォームは依然として1つの平面プラットフォームであり、ファンデーションプラットフォームの平面には、主動ペアの軸線がリング状になり(図)、6つの円が同心し、6つのリングが全てファンデーションプラットフォームの平面内にあり、6つのリングの半径がそれぞれ異なり、それぞれが各自のスライドレールに支持される。リングが6つの扇形領域に分けられ、各扇形領域がそれぞれ60°を占める。右上の扇形領域はベーシックパラレル機構であり、他の扇形領域はブランチパラレル機構である。
実施例23
実施例23(図79)では、ベーシックパラレル機構が3−PRR平面パラレル機構であり、実施例13におけるベーシックパラレル機構と同一にされる。実施例23は、実施例13を変形してなる。図70の右側にあるブランチパラレル機構に対して反射対称変換が1回施され、右側のブランチパラレル機構が軸線の下にされ、右上にある元のブランチパラレル機構が保留しないと、1つのスライド反射対称系のマルチモーションプラットフォームパラレルロボットが得られる。符号は、実施例13を参照する。
実施例24(図80)では、ベーシックパラレル機構が6−PSS空間パラレル機構である。実施例24は、実施例17(図74参照)を変形してなる。中間のブランチパラレル機構に対し反射対称変換が1回施され、中間のブランチパラレル機構がベーシックファンデーションプラットフォームの上にされ、元のブランチパラレル機構が保留せず、図中の最も上にあるブランチパラレル機構11.2を取り消すと、1つのスライド反射対称系のマルチモーションプラットフォームパラレルロボットが得られる。
実施例25
実施例25(図81)では、ベーシックパラレル機構が3−RRR(2T1R)平面パラレル機構であり、ベーシックファンデーションプラットフォーム12が平面パラレル機構の平面内にある三角形のファンデーションプラットフォームであり、メイン分岐チェーン13がRRR分岐チェーンであり、1つ目の転動ペアが主動ペア12aであり、3つの主動ペアの軸線がベーシックファンデーションプラットフォームの平面に対して垂直であり、主動ペアの軸線がベーシックファンデーションプラットフォームの三角形B0B0B0の頂点を通じ、ベーシックモーションプラットフォーム15が三角形のモーションプラットフォームである。ベーシックモーションプラットフォームの三角形が小さく、ベーシックファンデーションプラットフォームの三角形がより大きい。
実施例26(図82)では、ベーシックパラレル機構が3−RRS(1T2R)空間パラレル機構であり、ベーシックファンデーションプラットフォーム12が三角形のファンデーションプラットフォームであり、メイン分岐チェーン13がRRS分岐チェーンであり、1つ目の転動ペアが主動ペアであり、3つの主動ペアの軸線がベーシックファンデーションプラットフォームB0B0B0の平面内にあり、3つの主動ペアの軸線がそれぞれファンデーションプラットフォームの三角形の辺に対して平行であり、3つの主動ペアの軸線間の角度が120°にされる。ベーシックモーションプラットフォーム12が三角形のモーションプラットフォームである。
実施例27(図83)では、ベーシックパラレル機構が6−RSS(3T3R)空間パラレル機構であり、ベーシックファンデーションプラットフォーム12が平面正六角形のファンデーションプラットフォームであり、メイン分岐チェーン13がRSS分岐チェーンであり、1つ目の転動ペアが主動ペアであり、6つの主動ペアの軸線がファンデーションプラットフォームの平面内にあり、6つの主動ペアの軸線がそれぞれファンデーションプラットフォーム正六角形の6つ辺に重なり合い、ベーシックモーションプラットフォーム15が三角形のモーションプラットフォームである。
実施例28(図84)では、ベーシックパラレル機構が3−PRS(1T2R)空間パラレル機構であり、構造が実施例26に類似する。その相違点は、ダブル出力モーションペアが異なることにある。実施例26に用いられるのはペアNO.2である一方、実施例28に用いられるのはペアNO.26であり、ベーシックファンデーションプラットフォーム12が三角形のファンデーションプラットフォーム(図104における黒色の三角形)であり、メイン分岐チェーン13がPRS分岐チェーンであり、移動ペアが主動ペア12aであり、3つの主動ペアの軸線がファンデーションプラットフォームの平面内にあり、3つの主動ペアの軸線がY字状であり、3つの主動ペアの軸線間の角度が120°であり、ベーシックモーションプラットフォーム12が三角形のモーションプラットフォームである。
実施例29
実施例29(図85.1、図85.2)は、1つの固定したリセットリングを備えた両面歩行のパラレルロボットである。それは、2つの反射対称系のダブルモーションプラットフォームパラレルロボット(1つはレッグAと言い、1つはレッグBと言う)と1つのリセットリングを含む。レッグA21.1は、1つの反射対称系のダブルモーションプラットフォームパラレルロボットであり、レッグB21.2も1つの反射対称系のダブルモーションプラットフォームパラレルロボットである。レッグAおよびレッグBはいずれも1つのベーシックパラレル機構を有し、2つのベーシックパラレル機構がいずれも6−PSSパラレルレッグ機構である。移動ペアが主動ペアおよびダブル出力モーションペアであり、メイン出力端とサブ出力端が反射対称にされる。レッグAのダブル出力モーションペアが16.4で表され、レッグBのダブル出力モーションペアが16.5で表される。主動ペアの軸線が各自の六角形の辺と重なり合う。
実施例30(図86、一部の図)は、1つの調節可能なリセットリングを備えた両面歩行のパラレルロボットである。
実施例31は、実施例30を僅かに変形して形成される。実施例30でリセットリングと股関節を連結したCR直列機構がRR直列機構になる。転動ペアの軸線がファンデーションプラットフォームの平面に対して垂直である。ファンデーションプラットフォームに連結された転動ペアが駆動ペアであり、駆動ペアが転動すると、リセットリングを締めることができる。残りの特徴については、実施例30を参照する。
実施例32では、ベーシックパラレル機構がBen−Horinにより提出された自由度が6のパラレル機構をモデルとする。Ben−Horinの自由度が6のパラレル機構が3つの分岐チェーンを有し、それぞれの分岐チェーンが1つの自由度が2の平面台車と1つのSR分岐チェーンが直列に連結されてなる。本文では、自由度が2の平面台車が並進自由度が2の平面パラレル機構で代えられる。例えば、(2−RR>R)(「>」は2つの分岐チェーンが1つに合併したという意味をする)が自由度が2の台車の代わりに用いられ、自由度が2の小車の代わりに用いられる平面パラレル機構は自由度が2の平面機構と言う。本実施例では、(2−RR>R)が自由度が2の平面台車の代わりに用いられる。(2−RR>R)分岐チェーンがファンデーションプラットフォームの平面にあり、全ての転動ペアの軸線がファンデーションプラットフォームの平面に対して垂直である。従って、ファンデーションプラットフォームに連結された分岐チェーンが6つである。分岐チェーンにおける3つ目の転動ペアがダブル出力モーションペアである。隣り合う2つのメイン分岐チェーンが1つのダブル出力モーションペアを共用し、その元の2つの下流メイン分岐チェーンが1つの下流メイン分岐チェーンに合併し、SR分岐チェーンがそのまま維持する。変更後のBen−Horinパラレル機構が6つのメイン分岐チェーンを有し、下流分岐チェーンが依然として3つであり、新規Ben−Horinパラレル機構と言う。新規Ben−Horinパラレル機構は本発明のベーシックパラレル機構に対する要求に適合するため、本例の生成素子とされる。
実施例32(図87)は、下流分岐チェーンが合併した対称ダブルプラットフォームパラレルロボットである。単一のメイン分岐チェーンがRRRSR分岐チェーンで表しても良く、3つ目の転動ペアがダブル出力モーションペアである。2つの隣り合うメイン分岐チェーンが1つのダブル出力モーションペア31を共用し、2つの隣り合うメイン分岐チェーンおよびブランチ分岐チェーンの構造が(2−RR>R<2−SR)とされる(“>”は、前の2つの分岐チェーンが1つのモーションペアに連結されたという意味をする;“<”は、前のモーションペアが2つの出力端を有し、2つの下流分岐チェーンに連結されたと言う意味をする)。2つの隣り合うメイン分岐チェーンが1つのダブル出力モーションペア31を共用し、それはダブル分岐チェーン組合せと言う。
実施例33(図88)は、下流分岐チェーンが合併した両面歩行のパラレルロボットの実施例である。実施例33は、2つの実施例32をわずかに変形してなる。実施例32におけるベーシックファンデーションプラットフォームは六角形から正六角形に変更される。元々分岐チェーンの上流部分が全てベーシックファンデーションプラットフォーム六角形の内側にあるが、本例では、分岐チェーンの上流部分が全てベーシックファンデーションプラットフォームの六角形の外側に変更される。元の1つ目のモーションペアが六角形の頂点に取り付けられ、本例では、六角形の辺に取り付けるように変更される。同一の対称ダブルプラットフォームパラレルロボットの3つのダブル分岐チェーン組合せが正六角形の隣り合っていない3つの辺に取り付けられる。別の対称ダブルプラットフォームパラレルロボットの3つのダブル分岐チェーン組合せが正六角形の他3つの隣り合っていない辺に取り付けられる。モーションプラットフォームがフットアーチ構造に変更される。従って、下流分岐チェーンが合併した両面歩行のパラレルロボットが形成される。以下、図面を参照しながら、補足説明を行う。
同一のパラレルレッグ機構における3つのダブル分岐チェーン組合せの前からの3つの転動ペアの軸線がファンデーションプラットフォームの平面に対して垂直であり、6つのダブル分岐チェーン組合せが正六角形の外側に位置する。3つ目の転動ペアがダブル出力モーションペアである。レッグAの2つの隣り合う分岐チェーンが1つのダブル出力モーションペア31aを共用し、レッグBの2つの隣り合う分岐チェーンが1つのダブル出力モーションペア31bを共用し、下流メイン分岐チェーンがSR分岐チェーンである。
以下に、出願当初の特許請求の範囲に記載の事項を、付記する。
[1] マルチモーションプラットフォームパラレルロボットの構築方法であって、
当該パラレルロボットは、
ベーシックファンデーションプラットフォームと、ベーシックモーションプラットフォームと、ベーシックファンデーションプラットフォームとベーシックモーションプラットフォームを連結し、それぞれ2つ以上の広義モーションペアが直列に連結されてなったN2(2≦N2≦6)個のメイン分岐チェーンとを含む、1つのベーシックパラレル機構と、
ブランチファンデーションプラットフォームと、ブランチモーションプラットフォームと、ブランチファンデーションプラットフォームとブランチモーションプラットフォームを連結したN2(2≦N2≦6)個のブランチ分岐チェーンとを含む、N1(N1≧1)個のブランチパラレル機構と、からなり、
それぞれのパラレル機構がN2(2≦N2≦6)個の同一な自由度および同一な自由度性質を有しており、
当該構築方法は、
1)ベーシックパラレル機構を構築するステップと、
ベーシックパラレル機構は、
(a)ベーシックファンデーションプラットフォームは平面ファンデーションプラットフォームであることと、
(b)それぞれのメイン分岐チェーンにおける1つ目の広義モーションペアが主動ペアであって、メイン分岐チェーン毎に主動ペアが1つしかおらず、メイン分岐チェーンにおける1つ目のモーションペアの入力端が転動ペアまたは移動ペアであることと、
(c)1つ目の広義モーションペアの入力端の軸線がファンデーションプラットフォームの平面に対して平行であり、重なり合いまたは垂直であり、或いは、当該2種または3種の形態が全て存在することと、
(d)そのメイン分岐チェーンにおける前から2つまたは3つの広義モーションペアのうち、少なくとも1つの広義モーションペアが出力拡大可能なモーションペアであることと、
(e)ベーシックモーションプラットフォームがベーシックファンデーションプラットフォームの平面の一側に位置し、または、ベーシックファンデーションプラットフォームの平面と面一にし、メイン分岐チェーンにおいて、出力拡大可能なモーションペアがベーシックモーションプラットフォームと連結された部分は下流メイン分岐チェーンと言うことと
の5つ条件に適合しており、
2)ブランチパラレル機構を構築するステップと、
a)ベーシックパラレル機構のそれぞれのメイン分岐チェーンに、1つの拡大可能なモーションペアを選択し、この拡大可能なモーションペアは分界モーションペアとも言い、この拡大可能なモーションペアに1つの出力端を増やし、この出力端はサブ出力端と言い、元の出力端はメイン出力端と言い、計N1個のサブ出力端を増やし、サブ出力端の機能をメイン出力端の機能と同一にし、構造を対称にし、対称は、一定対称、並進対称、回転対称、反射対称およびスライド反射対称に加え、クロススケール対称をさらに含んでおり、
この拡大可能なモーションペアが元の広義モーションペアよりも出力端の1つ多いマルチ出力モーションペアになり、ブランチ分岐チェーンにおいて、分界広義モーションペアがブランチモーションプラットフォームと連結された部分は下流ブランチ分岐チェーンと言い、下流ブランチ分岐チェーンもサブブランチ分岐チェーンと言っており、
ブランチ分岐チェーンの下端点がブランチ分岐チェーンとブランチファンデーションプラットフォームとのヒンジポイントであり、N2個のブランチ分岐チェーンのヒンジポイントがブランチファンデーションプラットフォームを構成し、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームの形状を同一、類似またはほぼ同一にし、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームを対称にし、対称は、一定対称、並進対称、回転対称、反射対称およびスライド反射対称に加え、クロススケール対称をさらに含むように、
マルチ出力モーションペアを選択して構築し、ブランチファンデーションプラットフォームを構築しており、
b)新たに増やしたサブ出力端毎に、一つのサブブランチ分岐チェーンまたはサブブランチロッド(以下、サブブランチ分岐チェーンまたはサブブランチロッドをまとめてサブブランチ分岐チェーンと略称する)を連結し、このサブブランチ分岐チェーンとメイン分岐チェーン上の下流メイン分岐チェーンを同一またはほぼ同一にし、これらサブブランチ分岐チェーンがN2個サブブランチ分岐チェーンのグループを形成し、サブブランチ分岐チェーンと下流メイン分岐チェーンを対称にし、対称は、並進対称、回転対称、反射対称、スライド反射対称およびクロススケール対称を含むように、
サブブランチ分岐チェーンを構築しており、
c)このグループのサブブランチ分岐チェーンの末端にブランチモーションプラットフォームを連結し、ブランチモーションプラットフォームとベーシックモーションプラットフォームの形状を同一、類似またはほぼ同一にし、ブランチモーションプラットフォームとベーシックモーションプラットフォームを対称にし、ベーシックパラレル機構と対称なブランチパラレル機構を形成し、ブランチモーションプラットフォームとベーシックモーションプラットフォームとの対称は、並進対称、回転対称、反射対称、スライド反射対称およびクロススケール対称を含むように
ブランチモーションプラットフォームを連結しており、
3)ステップ2)のステップa)、b)、c)を繰り返し、もう1つの新たな対称ブランチモーションプラットフォーム、もう1つの新たな対称ブランチパラレル機構を得て、N1-1回繰り返し、N1個の新たな対称ブランチモーションプラットフォームとN1個の新たな対称ブランチパラレル機構を得るステップと、
を含むことを特徴とするマルチモーションプラットフォームパラレルロボットの構築方法。
[2] [1]に記載の方法を実現するマルチモーションプラットフォームパラレルロボットであって、
1つのベーシックパラレル機構11と、N1(N1≧1)個のブランチパラレル機構とからなり、それぞれのパラレル機構がN2(2≦N2≦6)個の自由度および同一な自由度性質を有し、
1)ベーシックパラレル機構は、
ベーシックファンデーションプラットフォームと、ベーシックモーションプラットフォームと、ベーシックファンデーションプラットフォームとベーシックモーションプラットフォームを連結し、それぞれ2つ以上の広義モーションペアが直列に連結されたN2(2≦N2≦6)個のメイン分岐チェーンを含み、さらに、
(a)ベーシックファンデーションプラットフォームは平面ファンデーションプラットフォームであることと、
(b)それぞれのメイン分岐チェーンにおける1つ目の広義モーションペアが主動ペアであって、メイン分岐チェーン毎に主動ペアが1つしかおらず、メイン分岐チェーンにおける1つ目の広義モーションペアの入力端が転動ペアまたは移動ペアであることと、
(c)1つ目の広義モーションペアの入力端の軸線がファンデーションプラットフォームの平面に対して平行であり、重なり合いまたは垂直であり、或いは、当該2種または3種の形態が全て存在することと、
(d)そのメイン分岐チェーンにおける前から2つまたは3つの広義モーションペアのうち、少なくとも1つの広義モーションペアが出力拡大可能なモーションペアであり、出力拡大可能なモーションペアが(N1+1)*N2個の出力端を有し、そのうち、メイン出力端がN2個であって、メイン分岐チェーンに位置し、残りの(N1*N2)個の出力端はサブ出力端と言い、メイン出力端とサブ出力端の構造が対称であり、機能が同一にされ、この拡大可能なモーションペアは分界モーションペアまたは対称マルチ出力モーションペアと言い、分界モーションペアがメイン分岐チェーンを2部分に分け、分界モーションペアのメイン出力端とベーシックモーションプラットフォーム間の部分は下流メイン分岐チェーンと言い、メイン出力端とサブ出力端が対称にされ、対称は、一定対称、並進対称、回転対称、反射対称およびスライド反射対称に加え、クロススケール対称をさらに含むことと、
(e)N2個の下流メイン分岐チェーンがベーシックモーションプラットフォームと連結し、ベーシックモーションプラットフォームがベーシックファンデーションプラットフォームの平面の一側に位置し、または、ベーシックファンデーションプラットフォームの平面と面一にすることと、
の5つ条件に適合するという構造であり、
(2)ブランチパラレル機構は、
ブランチファンデーションプラットフォームと、ブランチモーションプラットフォームと、ブランチファンデーションプラットフォームとブランチモーションプラットフォームを連結したN2*N1個のブランチ分岐チェーンと、を含み、
(a)メイン分岐チェーンの出力拡大可能なモーションペアにおいて、サブ出力端毎に1つのサブブランチ分岐チェーンが連結され、分界モーションペアのサブ出力端とブランチモーションプラットフォーム間の部分は下流ブランチ分岐チェーンと言い、下流ブランチ分岐チェーンの部分もサブブランチ分岐チェーンと言い、サブブランチ分岐チェーンとメイン分岐チェーン上の下流メイン分岐チェーンが同一またはほぼ同一にされ、構造が対称にされ、対称は、並進対称、回転対称、反射対称、スライド反射対称に加え、クロススケール対称をさらに含むことと、
(b)ブランチ分岐チェーンの下端がブランチ分岐チェーンとブランチファンデーションプラットフォームとのブランチ下端ヒンジポイントであるヒンジポイントであり、同一の対称特性を有する一つのグループのN2個のブランチ分岐チェーンのブランチ下端ヒンジポイントが、1つのブランチファンデーションプラットフォームを構成し、ブランチファンデーションプラットフォームがN1個であり、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームが対称にされ、対称は、一定対称、並進対称、回転対称、反射対称およびスライド反射対称に加え、クロススケール対称をさらに含むことと、
(c)同一の対称特性を有するサブブランチ分岐チェーンが、サブブランチ分岐チェーンのグループを構成し、同じグループのサブブランチ分岐チェーンがN2個であり、計N1グループのブランチ分岐チェーンがあることと、
(d)同グループのサブブランチ分岐チェーンが1つのモーションプラットフォームに連結され、1つのパラレル機構を形成し、このモーションプラットフォームはブランチモーションプラットフォーム15.1と言い、このパラレル機構はブランチパラレル機構と言い、N1グループのサブブランチ分岐チェーンがN1個のブランチモーションプラットフォームに連結され、ブランチモーションプラットフォームとベーシックモーションプラットフォームが同一、類似またはほぼ同一にされ、ブランチモーションプラットフォームとベーシックモーションプラットフォームが対称にされ、ブランチモーションプラットフォームがN1個であって、同様に、ブランチパラレル機構もN1個であり、ブランチパラレル機構とベーシックパラレル機構も対称にされ、ブランチモーションプラットフォームとベーシックモーションプラットフォームとの対称は、並進対称、回転対称、反射対称、スライド反射対称およびクロススケール対称を含んでおり、ブランチパラレル機構とベーシックパラレル機構との対称も、並進対称、回転対称、反射対称、スライド反射対称およびクロススケール対称を含むことと、
の構造特徴を有するという構造である
マルチモーションプラットフォームパラレルロボット。
[3] その主動ペアの入力端の軸線がファンデーションプラットフォームの平面内にあり、且つ、少なくとも3つの軸線が一点で交差する
ことを特徴とする[2]に記載のマルチモーションプラットフォームパラレルロボット。
[4] その主動ペアの入力端の軸線がファンデーションプラットフォームの平面内にあり、且つ、軸線が同一の円または楕円の接線、或いは、2つの同一平面の同心円の接線である ことを特徴とする[2]に記載のマルチモーションプラットフォームパラレルロボット。
[5] その主動ペアの入力端の軸線がファンデーションプラットフォームの平面に対して平行でありまたは重なり合い、且つ、相互に平行でありまたは重なり合う
ことを特徴とする[2]に記載のマルチモーションプラットフォームパラレルロボット。
[6] その主動ペアの入力端の軸線が全てファンデーションプラットフォームの平面に対して垂直である
ことを特徴とする[2]に記載のマルチモーションプラットフォームパラレルロボット。
[7] モーションプラットフォーム毎に、操作ハンドが取り付けられる
ことを特徴とする[2]、[3]、[4]、[5]および[6]のいずれか1項に記載のマルチモーションプラットフォームパラレルロボット。
[8] 1つの[2]、[3]、[4]、[5]および[6]のいずれか1項に記載の対称マルチプラットフォームパラレルロボットを備えるパラレル工作機械ロボットであって、
1つのモーションプラットフォームに、検出センサまたはプローブが取り付けられ、残りのモーションプラットフォームに、操作ハンドが取り付けられる
ことを特徴とするパラレル工作機械ロボット。
[9] 前記マルチモーションプラットフォームパラレルロボットが対称ダブルモーションプラットフォームパラレル機構であり、前記ベーシックモーションプラットフォームとブランチモーションプラットフォーム、または、メイン出力端とサブ出力端は、少なくとも1対がクロススケール対称にされ、ブランチ分岐チェーンとメイン分岐チェーンが同一またはほぼ同一にされる
ことを特徴とする[2]、[3]、[4]、[5]および[6]のいずれか1項に記載のマルチモーションプラットフォームパラレルロボット。
[10] 前記マルチモーションプラットフォームパラレルロボットは、ダブルモーションプラットフォームパラレルロボットであり、主動ペアの入力端の軸線がファンデーションプラットフォームの平面内にあり、その軸線が同一の円の接線でありまたはこの円の半径と重なり合い、或いは、2つの同一平面の同心円の接線でありまたはこれらの円の半径と重なり合い、マルチ出力モーションペアがダブル出力モーションペアであり、メイン出力端が全て前記円または楕円の内側にあり、サブ出力端が全て前記円または楕円の外側にあり、サブブランチ分岐チェーンと下流メイン分岐チェーンが同一またはほぼ同一にされ、ベーシックモーションプラットフォームとブランチモーションプラットフォームがクロススケール対称にされる
ことを特徴とする[2]または[4]に記載のマルチモーションプラットフォームパラレルロボット。
[11] そのベーシックパラレル機構が少自由度のパラレル機構であり、ベーシックパラレル機構はメイン分岐チェーンに加え、ベーシックファンデーションプラットフォームとブランチファンデーションプラットフォームを連結した余分な分岐チェーンをさらに含み、余分な分岐チェーンは消極的分岐チェーンであり、自由度が2以上且つ6未満であり、メイン分岐チェーンは制限のない自由度が6の分岐チェーンである
ことを特徴とする[2]に記載のマルチモーションプラットフォームパラレルロボット。
[12] 両面歩行のパラレルロボットであって、
2つの[2]に記載のマルチモーションプラットフォームパラレルロボットを備えており、マルチモーションプラットフォームパラレルロボットそれぞれのベーシックパラレル機構が全てパラレルレッグ機構であり、マルチモーションプラットフォームパラレルロボットそれぞれが反射対称な1つのベーシックパラレル機構と1つのブランチパラレル機構を含み、1つのマルチモーションプラットフォームパラレルロボットはレッグAと言い、もう1つはレッグBと言い、レッグAのベーシックパラレル機構とレッグBのベーシックパラレル機構またはレッグBのブランチパラレル機構が同一側に位置し1つの片面のパラレル歩行ロボットを構成し、レッグAのブランチパラレル機構とレッグBの別のパラレル機構が他側に位置し他の一つの片面のパラレル歩行ロボットを構成し、レッグAおよびレッグBのベーシックファンデーションプラットフォームが1つの平面に位置し、2つのベーシックファンデーションプラットフォームが固定し連結されて1つの股関節を形成し、4つのモーションプラットフォームが全てフットアーチの構造であり、レッグAのベーシックパラレル機構がレッグAのベーシックファンデーションプラットフォームと、レッグAのメイン分岐チェーンと、レッグAのベーシックモーションプラットフォームのフットアーチとからなり、レッグBのベーシックパラレル機構がレッグBのベーシックファンデーションプラットフォームと、レッグBのメイン分岐チェーンと、レッグBのベーシックモーションプラットフォームのフットアーチとからなり、
2つのパラレルレッグ機構の配列方式は、
(1)2つのマルチモーションプラットフォームパラレルロボットは、1つが左に、1つが右にあることと、
(2)2つのマルチモーションプラットフォームパラレルロボットは、1つが大きく、1つが小さくされ、小さい方が大きい方の中にあり、ベーシックファンデーションプラットフォームの同一側に位置する2つのモーションプラットフォームのフットアーチは、大きさが異なり、または、高さが異なり、或いは、高さおよび大きさがいずれも異なることと、
(3)2つのマルチモーションプラットフォームパラレルロボットが交差して配置され、ベーシックファンデーションプラットフォームの同一側に位置する2つのモーションプラットフォームのフットアーチは、大きさが異なり、または、高さが異なり、或いは、高さおよび大きさがいずれも異なることと、
のいずれか1つである
ことを特徴とする両面歩行のパラレルロボット。
[13] 2つのダブルモーションプラットフォームパラレルロボットは、小さい方が大きい方の中にあり、ベーシックファンデーションプラットフォームの同一側に位置する2つのモーションプラットフォームのフットアーチは、大きさが異なり、または、高さが異なり、或いは、大きさおよび高さがいずれも異なり、
ファンデーションプラットフォームの平面上の股関節に、ファンデーションプラットフォームよりも大きなリング状のリセットリングが設計され、連結ロッドにより股関節と連結され、このリセットリングが股関節と共通の中心を有し、リセットリングの半径がL/cosθよりも大きく、且つ、足指の外接円の半径と股関節の外接円の半径の両方の最大値以上にされ、
式L/cosθの中、
Lは2つの隣り合う足指の中心点(足指中心点と略称する)からベーシックファンデーションプラットフォームの中心までの距離であり、
θは足指中心点からベーシックファンデーションプラットフォームの中心まで連結線を引くと、この連結線とベーシックファンデーションプラットフォームの平面がなす角度である
ことを特徴とする[12]に記載の両面歩行のパラレルロボット。
[14] そのリセットリングの代わりにN3(N3≧2)段の弧形ロッドが用いられ、各弧形ロッドの両端に溝があり、溝の方向がリセットリングの接線方向と同一であり、隣り合う弧形ロッドが重なっており、N3段の弧形ロッドがリセットリングを構成し、股関節と弧形ロッドを連結したロッドの代わりにN3個の締め機構が用いられ、締め機構は、PR機構(転動ペアの軸線が移動ペアの軸線と垂直である)、CR機構(転動ペアの軸線が円柱ペアの軸線と垂直である)、HR機構(転動ペアの軸線が螺旋ペアの軸線と垂直である)、RR機構(2つの転動ペアの軸線が平行である)及びRRR機構(3つの転動ペアの軸線が平行である)という直列機構のうちの1つであり、前記1種または複数種の機構のうちから、N3個の直列機構が1グループの締め機構として選択され、締め機構の転動ペアの軸線がファンデーションプラットフォームの平面に対して垂直であり、締め機構の転動ペアの一端が2つの隣り合う弧形ロッドの溝と動的に組み合わせて、転動ペアが溝内にスライド可能であり、他端が股関節に連結される
ことを特徴とする[13]に記載の両面歩行のパラレルロボット。
[15] 前記モーションプラットフォームのフットアーチそれぞれは、少なくとも1つの足指に、軸線がファンデーションプラットフォームの平面に対して垂直な1つの広義移動ペアが取り付けられる
ことを特徴とする[12]、[13]または[14]に記載の両面歩行のパラレルロボット。
[16] ブランチパラレル機構が1つしかなく、ブランチパラレル機構がベーシックパラレル機構と反射対称にされ、前記メイン分岐チェーンの数が3以上且つ7以下であり、メイン分岐チェーンにおける3つ目の広義モーションペアがダブル出力モーションペアであり、ダブル出力モーションペアの出力端が反射対称にされ、少なくとも1対の隣り合うメイン分岐チェーンが同一のダブル出力モーションペアを共用し、その元の2つの下流メイン分岐チェーンが1つの下流メイン分岐チェーンに合併した後、ベーシックモーションプラットフォームに連結され、その元の2つのサブブランチ分岐チェーンが1つのサブブランチ分岐チェーンに合併した後、ブランチモーションプラットフォームに連結され、ブランチパラレル機構がベーシックパラレル機構と反射対称にされる
ことを特徴とする[2]に記載のマルチモーションプラットフォームパラレルロボット。
[17] 2つの[16]に記載のマルチモーションプラットフォームパラレルロボットを備え、2つのマルチモーションプラットフォームパラレルロボットのベーシックパラレル機構がパラレルレッグ機構であり、2つのベーシックファンデーションプラットフォームが1つの平面に配置され且つ一体に固定して連結され、2つのマルチモーションプラットフォームパラレルロボットのダブル出力モーションペアのファンデーションプラットフォームの平面における投影が異なる扇形領域に位置し、モーションプラットフォームがフットアーチの構造であり、フットアーチには足指があり、ベーシックファンデーションプラットフォームの平面の同一側に位置する2つのモーションプラットフォームのフットアーチは、大きさが異なり、または、高さが異なり、或いは、大きさおよび高さがいずれも異なる ことを特徴とする両面歩行のパラレルロボット。
Claims (17)
- マルチモーションプラットフォームパラレルロボットの構築方法であって、
当該パラレルロボットは、
ベーシックファンデーションプラットフォームと、ベーシックモーションプラットフォームと、ベーシックファンデーションプラットフォームとベーシックモーションプラットフォームを連結し、それぞれ2つ以上の広義モーションペアが直列に連結されてなったN2(2≦N2≦6)個のメイン分岐チェーンとを含む、1つのベーシックパラレル機構と、
ブランチファンデーションプラットフォームと、ブランチモーションプラットフォームと、ブランチファンデーションプラットフォームとブランチモーションプラットフォームを連結したN2(2≦N2≦6)個のブランチ分岐チェーンとを含む、N1(N1≧1)個のブランチパラレル機構と、からなり、
それぞれのパラレル機構がN2(2≦N2≦6)個の同一な自由度および同一な自由度性質を有しており、
当該構築方法は、
1)ベーシックパラレル機構を構築するステップと、
ベーシックパラレル機構は、
(a)ベーシックファンデーションプラットフォームは平面ファンデーションプラットフォームであることと、
(b)それぞれのメイン分岐チェーンにおける1つ目の広義モーションペアが主動ペアであって、メイン分岐チェーン毎に主動ペアが1つしかおらず、メイン分岐チェーンにおける1つ目のモーションペアの入力端が転動ペアまたは移動ペアであることと、
(c)1つ目の広義モーションペアの入力端の軸線がファンデーションプラットフォームの平面に対して平行であり、重なり合いまたは垂直であることと、
(d)そのメイン分岐チェーンにおけるベーシックファンデーションプラットフォームに接続された1つ目の広義モーションペアから数えた前から2つまたは3つの広義モーションペアのうち、少なくとも1つの広義モーションペアが出力拡大可能なモーションペアであることと、
(e)ベーシックモーションプラットフォームがベーシックファンデーションプラットフォームの平面の一側に位置し、または、ベーシックファンデーションプラットフォームの平面と面一にし、メイン分岐チェーンにおいて、出力拡大可能なモーションペアがベーシックモーションプラットフォームと連結された部分は下流メイン分岐チェーンと言うことと
の5つ条件に適合しており、
2)ブランチパラレル機構を構築するステップと、
a)ベーシックパラレル機構のそれぞれのメイン分岐チェーンに、1つの拡大可能なモーションペアを選択し、この拡大可能なモーションペアは分界モーションペアとも言い、この拡大可能なモーションペアに1つの出力端を増やし、この出力端はサブ出力端と言い、元の出力端はメイン出力端と言い、計N1個のサブ出力端を増やし、サブ出力端の機能をメイン出力端の機能と同一にし、構造を対称にし、対称は、並進対称、回転対称、反射対称およびスライド反射対称に加え、自己相似性をさらに含んでおり、
この拡大可能なモーションペアが元の広義モーションペアよりも出力端の1つ多いマルチ出力モーションペアになり、ブランチ分岐チェーンにおいて、分界広義モーションペアがブランチモーションプラットフォームと連結された部分は下流ブランチ分岐チェーンと言い、下流ブランチ分岐チェーンもサブブランチ分岐チェーンと言っており、
ブランチ分岐チェーンの下端点がブランチ分岐チェーンとブランチファンデーションプラットフォームとのヒンジポイントであり、N2個のブランチ分岐チェーンのヒンジポイントがブランチファンデーションプラットフォームを構成し、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームの形状を同一、類似またはほぼ同一にし、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームを対称にし、対称は、並進対称、回転対称、反射対称およびスライド反射対称に加え、自己相似性をさらに含むように、
マルチ出力モーションペアを選択して構築し、ブランチファンデーションプラットフォームを構築しており、
b)新たに増やしたサブ出力端毎に、一つのサブブランチ分岐チェーンまたはサブブランチロッド(以下、サブブランチ分岐チェーンまたはサブブランチロッドをまとめてサブブランチ分岐チェーンと略称する)を連結し、このサブブランチ分岐チェーンとメイン分岐チェーン上の下流メイン分岐チェーンを同一またはほぼ同一にし、これらサブブランチ分岐チェーンがN2個サブブランチ分岐チェーンのグループを形成し、サブブランチ分岐チェーンと下流メイン分岐チェーンを対称にし、対称は、並進対称、回転対称、反射対称、スライド反射対称および自己相似性を含むように、
サブブランチ分岐チェーンを構築しており、
c)このグループのサブブランチ分岐チェーンの末端にブランチモーションプラットフォームを連結し、ブランチモーションプラットフォームとベーシックモーションプラットフォームの形状を同一、類似またはほぼ同一にし、ブランチモーションプラットフォームとベーシックモーションプラットフォームを対称にし、ベーシックパラレル機構と対称なブランチパラレル機構を形成し、ブランチモーションプラットフォームとベーシックモーションプラットフォームとの対称は、並進対称、回転対称、反射対称、スライド反射対称および自己相似性を含むように
ブランチモーションプラットフォームを連結しており、
3)ステップ2)のステップa)、b)、c)を繰り返し、もう1つの新たな対称ブランチモーションプラットフォーム、もう1つの新たな対称ブランチパラレル機構を得て、N1-1回繰り返し、N1個の新たな対称ブランチモーションプラットフォームとN1個の新たな対称ブランチパラレル機構を得るステップと、
を含むことを特徴とするマルチモーションプラットフォームパラレルロボットの構築方法。 - 請求項1に記載の方法を実現するマルチモーションプラットフォームパラレルロボットであって、
1つのベーシックパラレル機構11と、N1(N1≧1)個のブランチパラレル機構とからなり、それぞれのパラレル機構がN2(2≦N2≦6)個の自由度および同一な自由度性質を有し、
1)ベーシックパラレル機構は、
ベーシックファンデーションプラットフォームと、ベーシックモーションプラットフォームと、ベーシックファンデーションプラットフォームとベーシックモーションプラットフォームを連結し、それぞれ2つ以上の広義モーションペアが直列に連結されたN2(2≦N2≦6)個のメイン分岐チェーンを含み、さらに、
(a)ベーシックファンデーションプラットフォームは平面ファンデーションプラットフォームであることと、
(b)それぞれのメイン分岐チェーンにおける1つ目の広義モーションペアが主動ペアであって、メイン分岐チェーン毎に主動ペアが1つしかおらず、メイン分岐チェーンにおける1つ目の広義モーションペアの入力端が転動ペアまたは移動ペアであることと、
(c)1つ目の広義モーションペアの入力端の軸線がファンデーションプラットフォームの平面に対して平行であり、重なり合いまたは垂直であることと、
(d)そのメイン分岐チェーンにおけるベーシックファンデーションプラットフォームに接続された1つ目の広義モーションペアから数えた前から2つまたは3つの広義モーションペアのうち、少なくとも1つの広義モーションペアが出力拡大可能なモーションペアであり、出力拡大可能なモーションペアが(N1+1)*N2個の出力端を有し、そのうち、メイン出力端がN2個であって、メイン分岐チェーンに位置し、残りの(N1*N2)個の出力端はサブ出力端と言い、メイン出力端とサブ出力端の構造が対称であり、機能が同一にされ、この拡大可能なモーションペアは分界モーションペアまたは対称マルチ出力モーションペアと言い、分界モーションペアがメイン分岐チェーンを2部分に分け、分界モーションペアのメイン出力端とベーシックモーションプラットフォーム間の部分は下流メイン分岐チェーンと言い、メイン出力端とサブ出力端が対称にされ、対称は、並進対称、回転対称、反射対称およびスライド反射対称に加え、自己相似性をさらに含むことと、
(e)N2個の下流メイン分岐チェーンがベーシックモーションプラットフォームと連結し、ベーシックモーションプラットフォームがベーシックファンデーションプラットフォームの平面の一側に位置し、または、ベーシックファンデーションプラットフォームの平面と面一にすることと、
の5つ条件に適合するという構造であり、
(2)ブランチパラレル機構は、
ブランチファンデーションプラットフォームと、ブランチモーションプラットフォームと、ブランチファンデーションプラットフォームとブランチモーションプラットフォームを連結したN2*N1個のブランチ分岐チェーンと、を含み、
(a)メイン分岐チェーンの出力拡大可能なモーションペアにおいて、サブ出力端毎に1つのサブブランチ分岐チェーンが連結され、分界モーションペアのサブ出力端とブランチモーションプラットフォーム間の部分は下流ブランチ分岐チェーンと言い、下流ブランチ分岐チェーンの部分もサブブランチ分岐チェーンと言い、サブブランチ分岐チェーンとメイン分岐チェーン上の下流メイン分岐チェーンが同一またはほぼ同一にされ、構造が対称にされ、対称は、並進対称、回転対称、反射対称、スライド反射対称に加え、自己相似性をさらに含むことと、
(b)ブランチ分岐チェーンの下端がブランチ分岐チェーンとブランチファンデーションプラットフォームとのブランチ下端ヒンジポイントであるヒンジポイントであり、同一の対称特性を有する一つのグループのN2個のブランチ分岐チェーンのブランチ下端ヒンジポイントが、1つのブランチファンデーションプラットフォームを構成し、ブランチファンデーションプラットフォームがN1個であり、ブランチファンデーションプラットフォームとベーシックファンデーションプラットフォームが対称にされ、対称は、並進対称、回転対称、反射対称およびスライド反射対称に加え、自己相似性をさらに含むことと、
(c)同一の対称特性を有するサブブランチ分岐チェーンが、サブブランチ分岐チェーンのグループを構成し、同じグループのサブブランチ分岐チェーンがN2個であり、計N1グループのブランチ分岐チェーンがあることと、
(d)同グループのサブブランチ分岐チェーンが1つのモーションプラットフォームに連結され、1つのパラレル機構を形成し、このモーションプラットフォームはブランチモーションプラットフォーム15.1と言い、このパラレル機構はブランチパラレル機構と言い、N1グループのサブブランチ分岐チェーンがN1個のブランチモーションプラットフォームに連結され、ブランチモーションプラットフォームとベーシックモーションプラットフォームが同一、類似またはほぼ同一にされ、ブランチモーションプラットフォームとベーシックモーションプラットフォームが対称にされ、ブランチモーションプラットフォームがN1個であって、同様に、ブランチパラレル機構もN1個であり、ブランチパラレル機構とベーシックパラレル機構も対称にされ、ブランチモーションプラットフォームとベーシックモーションプラットフォームとの対称は、並進対称、回転対称、反射対称、スライド反射対称および自己相似性を含んでおり、ブランチパラレル機構とベーシックパラレル機構との対称も、並進対称、回転対称、反射対称、スライド反射対称および自己相似性を含むことと、
の構造特徴を有するという構造である
マルチモーションプラットフォームパラレルロボット。 - その主動ペアの入力端の軸線がファンデーションプラットフォームの平面内にあり、且つ、少なくとも3つの軸線が一点で交差する
ことを特徴とする請求項2に記載のマルチモーションプラットフォームパラレルロボット。 - その主動ペアの入力端の軸線がファンデーションプラットフォームの平面内にあり、且つ、軸線が同一の円または楕円の接線、或いは、2つの同一平面の同心円の接線である ことを特徴とする請求項2に記載のマルチモーションプラットフォームパラレルロボット。
- その主動ペアの入力端の軸線がファンデーションプラットフォームの平面に対して平行でありまたは重なり合い、且つ、相互に平行でありまたは重なり合う
ことを特徴とする請求項2に記載のマルチモーションプラットフォームパラレルロボット。 - その主動ペアの入力端の軸線が全てファンデーションプラットフォームの平面に対して垂直である
ことを特徴とする請求項2に記載のマルチモーションプラットフォームパラレルロボット。 - モーションプラットフォーム毎に、操作ハンドが取り付けられる
ことを特徴とする請求項2、3、4、5および6のいずれか1項に記載のマルチモーションプラットフォームパラレルロボット。 - 1つの請求項2、3、4、5および6のいずれか1項に記載のマルチモーションプラットフォームパラレルロボットを備えるパラレル工作機械ロボットであって、
1つのモーションプラットフォームに、検出センサまたはプローブが取り付けられ、残りのモーションプラットフォームに、操作ハンドが取り付けられる
ことを特徴とするパラレル工作機械ロボット。 - 前記マルチモーションプラットフォームパラレルロボットが対称ダブルモーションプラットフォームパラレル機構であり、前記ベーシックモーションプラットフォームとブランチモーションプラットフォーム、または、メイン出力端とサブ出力端は、少なくとも1対が自己相似性にされ、ブランチ分岐チェーンとメイン分岐チェーンが同一またはほぼ同一にされる
ことを特徴とする請求項2、3、4、5および6のいずれか1項に記載のマルチモーションプラットフォームパラレルロボット。 - 前記マルチモーションプラットフォームパラレルロボットは、ダブルモーションプラットフォームパラレルロボットであり、主動ペアの入力端の軸線がファンデーションプラットフォームの平面内にあり、その軸線が同一の円の接線でありまたはこの円の半径と重なり合い、或いは、2つの同一平面の同心円の接線でありまたはこれらの円の半径と重なり合い、マルチ出力モーションペアがダブル出力モーションペアであり、メイン出力端が全て前記円または楕円の内側にあり、サブ出力端が全て前記円または楕円の外側にあり、サブブランチ分岐チェーンと下流メイン分岐チェーンが同一またはほぼ同一にされ、ベーシックモーションプラットフォームとブランチモーションプラットフォームが自己相似性にされる
ことを特徴とする請求項2または4に記載のマルチモーションプラットフォームパラレルロボット。 - そのベーシックパラレル機構が少自由度のパラレル機構であり、ベーシックパラレル機構はメイン分岐チェーンに加え、ベーシックファンデーションプラットフォームとブランチファンデーションプラットフォームを連結した余分な分岐チェーンをさらに含み、余分な分岐チェーンは消極的分岐チェーンであり、自由度が2以上且つ6未満であり、メイン分岐チェーンは制限のない自由度が6の分岐チェーンである
ことを特徴とする請求項2に記載のマルチモーションプラットフォームパラレルロボット。 - 両面歩行のパラレルロボットであって、
2つの請求項2に記載のマルチモーションプラットフォームパラレルロボットを備えており、マルチモーションプラットフォームパラレルロボットそれぞれのベーシックパラレル機構が全てパラレルレッグ機構であり、マルチモーションプラットフォームパラレルロボットそれぞれが反射対称な1つのベーシックパラレル機構と1つのブランチパラレル機構を含み、1つのマルチモーションプラットフォームパラレルロボットはレッグAと言い、もう1つはレッグBと言い、レッグAのベーシックパラレル機構とレッグBのベーシックパラレル機構またはレッグBのブランチパラレル機構が同一側に位置し1つの片面のパラレル歩行ロボットを構成し、レッグAのブランチパラレル機構とレッグBの別のパラレル機構が他側に位置し他の一つの片面のパラレル歩行ロボットを構成し、レッグAおよびレッグBのベーシックファンデーションプラットフォームが1つの平面に位置し、2つのベーシックファンデーションプラットフォームが固定し連結されて1つの股関節を形成し、4つのモーションプラットフォームが全てフットアーチの構造であり、レッグAのベーシックパラレル機構がレッグAのベーシックファンデーションプラットフォームと、レッグAのメイン分岐チェーンと、レッグAのベーシックモーションプラットフォームのフットアーチとからなり、レッグBのベーシックパラレル機構がレッグBのベーシックファンデーションプラットフォームと、レッグBのメイン分岐チェーンと、レッグBのベーシックモーションプラットフォームのフットアーチとからなり、
2つのパラレルレッグ機構の配列方式は、
(1)2つのマルチモーションプラットフォームパラレルロボットは、1つが左に、1つが右にあることと、
(2)2つのマルチモーションプラットフォームパラレルロボットは、1つが大きく、1つが小さくされ、小さい方が大きい方の中にあり、ベーシックファンデーションプラットフォームの同一側に位置する2つのモーションプラットフォームのフットアーチは、大きさが異なり、または、高さが異なり、或いは、高さおよび大きさがいずれも異なることと、
(3)2つのマルチモーションプラットフォームパラレルロボットが交差して配置され、ベーシックファンデーションプラットフォームの同一側に位置する2つのモーションプラットフォームのフットアーチは、大きさが異なり、または、高さが異なり、或いは、高さおよび大きさがいずれも異なることと、
のいずれか1つである
ことを特徴とする両面歩行のパラレルロボット。 - 2つのダブルモーションプラットフォームパラレルロボットは、小さい方が大きい方の中にあり、ベーシックファンデーションプラットフォームの同一側に位置する2つのモーションプラットフォームのフットアーチは、大きさが異なり、または、高さが異なり、或いは、大きさおよび高さがいずれも異なり、
ファンデーションプラットフォームの平面上の股関節に、ファンデーションプラットフォームよりも大きなリング状のリセットリングが設計され、連結ロッドにより股関節と連結され、このリセットリングが股関節と共通の中心を有し、リセットリングの半径がL/cosθよりも大きく、且つ、足指の外接円の半径と股関節の外接円の半径の両方の最大値以上にされ、
式L/cosθの中、
Lは2つの隣り合う足指の中心点(足指中心点と略称する)からベーシックファンデーションプラットフォームの中心までの距離であり、
θは足指中心点からベーシックファンデーションプラットフォームの中心まで連結線を引くと、この連結線とベーシックファンデーションプラットフォームの平面がなす角度である
ことを特徴とする請求項12に記載の両面歩行のパラレルロボット。 - そのリセットリングの代わりにN3(N3≧2)段の弧形ロッドが用いられ、各弧形ロッドの両端に溝があり、溝の方向がリセットリングの接線方向と同一であり、隣り合う弧形ロッドが重なっており、N3段の弧形ロッドがリセットリングを構成し、股関節と弧形ロッドを連結したロッドの代わりにN3個の締め機構が用いられ、締め機構は、PR機構(転動ペアの軸線が移動ペアの軸線と垂直である)、CR機構(転動ペアの軸線が円柱ペアの軸線と垂直である)、HR機構(転動ペアの軸線が螺旋ペアの軸線と垂直である)、RR機構(2つの転動ペアの軸線が平行である)及びRRR機構(3つの転動ペアの軸線が平行である)という直列機構のうちの1つであり、前記1種または複数種の機構のうちから、N3個の直列機構が1グループの締め機構として選択され、締め機構の転動ペアの軸線がファンデーションプラットフォームの平面に対して垂直であり、締め機構の転動ペアの一端が2つの隣り合う弧形ロッドの溝と動的に組み合わせて、転動ペアが溝内にスライド可能であり、他端が股関節に連結される
ことを特徴とする請求項13に記載の両面歩行のパラレルロボット。 - 前記モーションプラットフォームのフットアーチそれぞれは、少なくとも1つの足指に、軸線がファンデーションプラットフォームの平面に対して垂直な1つの広義移動ペアが取り付けられる
ことを特徴とする請求項12、13または14に記載の両面歩行のパラレルロボット。 - ブランチパラレル機構が1つしかなく、ブランチパラレル機構がベーシックパラレル機構と反射対称にされ、前記メイン分岐チェーンの数が3以上且つ7以下であり、メイン分岐チェーンにおける3つ目の広義モーションペアがダブル出力モーションペアであり、ダブル出力モーションペアの出力端が反射対称にされ、少なくとも1対の隣り合うメイン分岐チェーンが同一のダブル出力モーションペアを共用し、その元の2つの下流メイン分岐チェーンが1つの下流メイン分岐チェーンに合併した後、ベーシックモーションプラットフォームに連結され、その元の2つのサブブランチ分岐チェーンが1つのサブブランチ分岐チェーンに合併した後、ブランチモーションプラットフォームに連結され、ブランチパラレル機構がベーシックパラレル機構と反射対称にされる
ことを特徴とする請求項2に記載のマルチモーションプラットフォームパラレルロボット。 - 2つの請求項16に記載のマルチモーションプラットフォームパラレルロボットを備え、2つのマルチモーションプラットフォームパラレルロボットのベーシックパラレル機構がパラレルレッグ機構であり、2つのベーシックファンデーションプラットフォームが1つの平面に配置され且つ一体に固定して連結され、2つのマルチモーションプラットフォームパラレルロボットのダブル出力モーションペアのファンデーションプラットフォームの平面における投影が異なる扇形領域に位置し、モーションプラットフォームがフットアーチの構造であり、フットアーチには足指があり、ベーシックファンデーションプラットフォームの平面の同一側に位置する2つのモーションプラットフォームのフットアーチは、大きさが異なり、または、高さが異なり、或いは、大きさおよび高さがいずれも異なる ことを特徴とする両面歩行のパラレルロボット。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201510275161.6 | 2015-05-26 | ||
| CN201510275161.6A CN104972453B (zh) | 2015-05-26 | 2015-05-26 | 一种多运动平台并联机器人构建方法及其并联机器人 |
| PCT/CN2016/082745 WO2016188368A1 (zh) | 2015-05-26 | 2016-05-20 | 一种多运动平台并联机器人构建方法及其并联机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018515354A JP2018515354A (ja) | 2018-06-14 |
| JP6732894B2 true JP6732894B2 (ja) | 2020-07-29 |
Family
ID=54269688
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018513710A Active JP6732894B2 (ja) | 2015-05-26 | 2016-05-20 | マルチモーションプラットフォームパラレルロボットの構築方法およびそのパラレルロボット |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US10279469B2 (ja) |
| EP (1) | EP3305474A4 (ja) |
| JP (1) | JP6732894B2 (ja) |
| CN (2) | CN104972453B (ja) |
| WO (1) | WO2016188368A1 (ja) |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104972453B (zh) | 2015-05-26 | 2016-09-28 | 韩方元 | 一种多运动平台并联机器人构建方法及其并联机器人 |
| CN105171091B (zh) * | 2015-10-27 | 2017-06-27 | 北华航天工业学院 | 新型变输入可重构机械式牛头刨床主运动机构 |
| CN105947179B (zh) * | 2016-05-20 | 2018-03-16 | 天津大学 | 用于改变机翼翼展的折叠机构 |
| CN106346450B (zh) * | 2016-10-17 | 2018-11-09 | 中国科学院深圳先进技术研究院 | 三支链三自由度并联机构 |
| CN106826775B (zh) * | 2017-04-07 | 2024-03-01 | 河南科技大学 | 一种各向同性空间二自由度转动并联机器人 |
| CN107009346B (zh) * | 2017-04-07 | 2024-03-01 | 河南科技大学 | 一种空间二自由度转动并联机构 |
| CN107300357B (zh) * | 2017-06-22 | 2023-05-12 | 昆明理工大学 | 一种非接触式三自由度光学三维测量转台 |
| CN107186698A (zh) * | 2017-06-29 | 2017-09-22 | 佛山思恩思智能装备有限公司 | 双子并联机器人系统 |
| CN107414793B (zh) * | 2017-08-01 | 2020-07-31 | 韩方元 | 一种混联步行机器人的构建方法及其混联步行机器人 |
| CN109747727A (zh) * | 2017-11-07 | 2019-05-14 | 山东交通学院 | 一种电动缸驱动的模块化机器人运输平台 |
| CN107756378A (zh) * | 2017-11-20 | 2018-03-06 | 长沙理工大学 | 一种平面三自由度刚体运动跟踪机构 |
| CN112566859B (zh) * | 2018-07-30 | 2023-01-31 | 肖氏工业集团公司 | 自动化粗纱架组件和系统及其制作和使用方法 |
| CN108972509B (zh) * | 2018-08-07 | 2024-03-29 | 浙江理工大学 | 一种具有多个操作模式的三自由度并联机构 |
| CN109132395B (zh) * | 2018-08-22 | 2023-11-10 | 华晓精密工业(苏州)有限公司 | 一种倍程平移机构 |
| CN109129423A (zh) * | 2018-09-06 | 2019-01-04 | 燕山大学 | 一种超6阶单环空间连杆机构及设计方法 |
| CN109176471B (zh) * | 2018-09-30 | 2023-10-24 | 昆明理工大学 | 一种四自由度并联机构 |
| CN110154002B (zh) * | 2019-06-17 | 2024-03-12 | 无锡超通智能制造技术研究院有限公司 | 一种平面二自由度并联机构 |
| CN111152190B (zh) * | 2019-10-18 | 2023-02-28 | 上海工程技术大学 | 一种适用于非结构化地形的多运动模式移动并联机构及其步态控制方法 |
| CN110861071B (zh) * | 2019-10-30 | 2021-01-08 | 北京交通大学 | 一种具有虚拟转动中心的两转动并联机构 |
| EP4094708A4 (en) * | 2020-01-23 | 2024-01-17 | Noahtron Intelligence Medtech Hangzhou Co Ltd | SURGICAL ROBOTIC ARM AND SURGICAL ROBOT |
| CN111096871A (zh) * | 2020-02-03 | 2020-05-05 | 河南理工大学 | 一种踝关节康复机器人的尺寸参数确定方法 |
| CN111376235B (zh) * | 2020-03-31 | 2022-07-15 | 哈尔滨工业大学 | 一种重载四自由度四平行四连杆式执行机构 |
| CN112171648B (zh) * | 2020-10-30 | 2021-07-30 | 燕山大学 | 两自由度球面运动并联机构 |
| CN112968695B (zh) * | 2021-02-18 | 2023-06-06 | 节卡机器人股份有限公司 | 一种双端口电路、数字输出端口电路及机器人 |
| CN113043228B (zh) * | 2021-03-22 | 2022-03-01 | 江苏宏达数控科技股份有限公司 | 一种多工位动力刀架的调姿检测平台及其控制方法 |
| CN113084790B (zh) * | 2021-04-29 | 2022-04-15 | 江南大学 | 位移和角位移转换放大的平移夹钳机械手及驱动控制方法 |
| CN113084864B (zh) * | 2021-05-07 | 2022-09-27 | 重庆理工大学 | 一种可变刚度的机器人关节结构 |
| CN113232004B (zh) * | 2021-05-24 | 2022-06-17 | 洛阳理工学院 | 一种自动美缝机器人和美缝施工方法 |
| CN113319829A (zh) * | 2021-07-07 | 2021-08-31 | 天津大学 | 一种高刚度运动解耦三平动并联机构 |
| CN114019031B (zh) * | 2021-09-13 | 2023-10-13 | 上海工程技术大学 | 力触觉系统主端操作机构及力触觉核电装备运维装置 |
| CN113606466B (zh) * | 2021-10-08 | 2022-01-04 | 成都理工大学 | 一种便携式双目摄影测量装置 |
| CN114102561B (zh) * | 2021-11-26 | 2023-06-27 | 南昌大学 | 一种具有圆柱面平移和一维转动并联机器人装置 |
| CN114800602B (zh) * | 2022-04-12 | 2023-06-02 | 北京航空航天大学 | 一种具有柔性元件的紧凑型变刚度关节模组 |
| CN114987639B (zh) * | 2022-04-28 | 2024-01-26 | 上海工程技术大学 | 一种多构态可换向滚动机构 |
| CN114802516B (zh) * | 2022-05-31 | 2023-04-11 | 电子科技大学 | 一种角钢塔塔身螺栓紧固机器人 |
| CN115816423A (zh) * | 2022-09-20 | 2023-03-21 | 北京萌友智能科技有限公司 | 用于机器人的并联机构云台装置、位姿控制方法及控制器 |
| CN116766164B (zh) * | 2023-08-23 | 2023-10-20 | 太原理工大学 | 一种带有多环耦合支链的高刚度五自由度并联驱动机器人 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05146980A (ja) * | 1991-03-25 | 1993-06-15 | Hitachi Metals Ltd | パラレルマニプレータ |
| JPH10286792A (ja) * | 1997-04-12 | 1998-10-27 | Hitachi Seiki Co Ltd | 平行リンクで構成された脚を有する位置決め装置及び工作機械 |
| JP2000246675A (ja) * | 1999-02-26 | 2000-09-12 | Hitachi Zosen Corp | ロボット装置 |
| SE0100134D0 (sv) * | 2001-01-15 | 2001-01-15 | Abb Ab | Industrirobot |
| ES2322036T3 (es) * | 2002-01-16 | 2009-06-16 | Abb Ab | Robot industrial. |
| JP2003291080A (ja) * | 2002-03-31 | 2003-10-14 | Atsuo Takanishi | 2足歩行ロボットの下半身モジュール |
| US7498758B2 (en) * | 2003-09-12 | 2009-03-03 | Tmsuk Co., Ltd. | Lower half body module of bipedal walking robot |
| DE602005025343D1 (de) * | 2004-06-10 | 2011-01-27 | Abb Ab | Kinematischer parallelroboter und verfahren zur steuerung dieses roboters |
| JP4289506B2 (ja) * | 2006-03-03 | 2009-07-01 | 株式会社ジェイテクト | 四自由度パラレルロボット |
| CN101564840A (zh) * | 2009-01-21 | 2009-10-28 | 上海广茂达伙伴机器人有限公司 | 基于并联机构的机器人构件、优化设计方法及机器人 |
| CN101973027B (zh) * | 2010-09-27 | 2012-08-29 | 韩方元 | 一种并联步行机器人的连接方法及其并联步行机器人 |
| JP5833869B2 (ja) * | 2011-09-06 | 2015-12-16 | 川崎重工業株式会社 | デルタ型パラレルロボット |
| CZ2012566A3 (cs) * | 2012-08-22 | 2013-10-30 | CVUT v Praze, Fakulta strojní | Zarízení pro snízení prenosu sil do rámu ze dvou vzájemne silove na sebe pusobících cástí |
| GB2512059B (en) * | 2013-03-18 | 2016-08-31 | Rolls Royce Plc | An independently moveable machine tool |
| CN103522283A (zh) * | 2013-10-23 | 2014-01-22 | 北华航天工业学院 | 一种平面二自由度并联平动机器人机构 |
| CN204005027U (zh) * | 2014-07-29 | 2014-12-10 | 电子科技大学 | 基于并联机构的管道机器人 |
| CN104440921B (zh) * | 2014-11-07 | 2016-09-07 | 韩方元 | 一种多平移自由度平行四边形复杂运动副 |
| JP6472642B2 (ja) * | 2014-11-21 | 2019-02-20 | 国立研究開発法人情報通信研究機構 | 可動部を有する装置、及び可動部を有する自律型ロボット装置 |
| CN104972453B (zh) | 2015-05-26 | 2016-09-28 | 韩方元 | 一种多运动平台并联机器人构建方法及其并联机器人 |
-
2015
- 2015-05-26 CN CN201510275161.6A patent/CN104972453B/zh active Active
-
2016
- 2016-05-20 EP EP16799256.9A patent/EP3305474A4/en not_active Withdrawn
- 2016-05-20 JP JP2018513710A patent/JP6732894B2/ja active Active
- 2016-05-20 US US15/576,657 patent/US10279469B2/en active Active
- 2016-05-20 WO PCT/CN2016/082745 patent/WO2016188368A1/zh active Application Filing
- 2016-05-20 CN CN201680043393.1A patent/CN107848107B/zh not_active Expired - Fee Related
-
2019
- 2019-05-07 US US16/405,596 patent/US10675751B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN104972453B (zh) | 2016-09-28 |
| CN107848107A (zh) | 2018-03-27 |
| US10279469B2 (en) | 2019-05-07 |
| US20180126545A1 (en) | 2018-05-10 |
| CN107848107B (zh) | 2021-07-02 |
| US20190262984A1 (en) | 2019-08-29 |
| CN104972453A (zh) | 2015-10-14 |
| WO2016188368A1 (zh) | 2016-12-01 |
| EP3305474A4 (en) | 2019-02-13 |
| JP2018515354A (ja) | 2018-06-14 |
| EP3305474A1 (en) | 2018-04-11 |
| US10675751B2 (en) | 2020-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6732894B2 (ja) | マルチモーションプラットフォームパラレルロボットの構築方法およびそのパラレルロボット | |
| JP4376938B2 (ja) | コルヌ螺旋歯形歯車 | |
| Liu et al. | Kinematics analysis of the roller screw based on the accuracy of meshing point calculation | |
| CN109241670B (zh) | 一种圆弧齿廓双弧形螺旋齿轮真实齿面创成方法 | |
| CN110032140B (zh) | 一种五轴加工中球形刀刀轴矢量规划方法 | |
| Lin et al. | Non-singular tool path planning by translating tool orientations in C-space | |
| KR20160013139A (ko) | 엔드 릴리프를 갖는 비창성식 베벨 기어를 제조하기 위한 스윙 모션 | |
| Zhang et al. | Improving the kinematic performance of a planar 3-RRR parallel manipulator through actuation mode conversion | |
| CN100421885C (zh) | 具有汇交副的4、5自由度对称并联机器人机构 | |
| CN104182631A (zh) | 一种多轴加工系统的刀具偏离量的建模方法 | |
| CN109570591A (zh) | 离心叶轮切削加工方法及装置和离心叶轮加工设备 | |
| CN107932482B (zh) | 一种可实现三维转动和两维移动运动的五自由度并联机构 | |
| CN104915993A (zh) | 一种三维拉伸建模的方法和设备 | |
| Liping et al. | Kinematics and inverse dynamics analysis for a novel 3-PUU parallel mechanism | |
| ES2693744T3 (es) | Procedimiento y dispositivo para generar datos de control para configurar un diente de un dentado de engranaje recto por mecanizado de fresado de una pieza de trabajo en una máquina-herramienta | |
| CN104999463A (zh) | 一种基于构形平面的冗余机械臂运动控制方法 | |
| CN110497727A (zh) | 一种立体石雕加工的最优加工空间选取方法 | |
| CN109063392B (zh) | 一种基于圆弧齿廓的弧形齿面齿轮真实齿面创成方法 | |
| Harib et al. | Optimal design for improved hybrid kinematic machine tools structures | |
| CN109128390B (zh) | 一种直齿锥齿轮刨削加工齿廓三维建模方法及计算机可读存储介质 | |
| Parada et al. | A new meta-module for efficient reconfiguration of hinged-units modular robots | |
| CN103092130B (zh) | 一种活塞外圆建模方法 | |
| Lu et al. | Using CAD geometric variation approach machining complex workpiece by a 3-SPR parallel machine tool | |
| Chen et al. | Polyhedral space curve meshing reducer with multiple output shafts | |
| CN110293544A (zh) | 变刚度软体蛇形臂的变形预测方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20180322 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180322 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190306 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200512 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200609 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200708 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6732894 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |