JP6668626B2 - 電子デバイス、電子機器、および移動体 - Google Patents
電子デバイス、電子機器、および移動体 Download PDFInfo
- Publication number
- JP6668626B2 JP6668626B2 JP2015141925A JP2015141925A JP6668626B2 JP 6668626 B2 JP6668626 B2 JP 6668626B2 JP 2015141925 A JP2015141925 A JP 2015141925A JP 2015141925 A JP2015141925 A JP 2015141925A JP 6668626 B2 JP6668626 B2 JP 6668626B2
- Authority
- JP
- Japan
- Prior art keywords
- shield
- support
- portions
- wide
- electronic device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 137
- 239000000758 substrate Substances 0.000 claims description 41
- 230000002093 peripheral effect Effects 0.000 claims description 29
- 239000000463 material Substances 0.000 description 88
- 230000004048 modification Effects 0.000 description 28
- 238000012986 modification Methods 0.000 description 28
- 239000010949 copper Substances 0.000 description 19
- 230000000694 effects Effects 0.000 description 17
- 230000007613 environmental effect Effects 0.000 description 15
- 229920001721 polyimide Polymers 0.000 description 14
- 239000000919 ceramic Substances 0.000 description 12
- 230000008602 contraction Effects 0.000 description 11
- 239000011347 resin Substances 0.000 description 11
- 229920005989 resin Polymers 0.000 description 11
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 10
- 239000004642 Polyimide Substances 0.000 description 10
- 229910052802 copper Inorganic materials 0.000 description 10
- 229910052751 metal Inorganic materials 0.000 description 10
- 239000002184 metal Substances 0.000 description 10
- 241000251131 Sphyrna Species 0.000 description 9
- 230000008859 change Effects 0.000 description 9
- 239000007769 metal material Substances 0.000 description 7
- 229910000881 Cu alloy Inorganic materials 0.000 description 6
- 230000005484 gravity Effects 0.000 description 6
- 239000010453 quartz Substances 0.000 description 6
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 6
- 239000008186 active pharmaceutical agent Substances 0.000 description 5
- 230000005855 radiation Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 238000003384 imaging method Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000005684 electric field Effects 0.000 description 3
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 239000011651 chromium Substances 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 239000009719 polyimide resin Substances 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 241000251468 Actinopterygii Species 0.000 description 1
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- 235000014676 Phragmites communis Nutrition 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 239000003575 carbonaceous material Substances 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- -1 silver halide Chemical class 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
- G01C19/5621—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Gyroscopes (AREA)
- Microelectronics & Electronic Packaging (AREA)
Description
また、導電パターンが金属で構成されているため、例えば紫外線やレーザー光などの光を遮蔽することが可能となる。
<第1実施形態>
先ず、本発明の電子デバイスとして例示するジャイロセンサーの第1実施形態に係る構成、および製造方法について、図1〜図8を参照して説明する。図1は、本発明の電子デバイスとして例示するジャイロセンサーの分解斜視図である。図2は、ジャイロセンサーの断面を示し、図1中のA−A線断面図である。図3は、図1に示すジャイロセンサーの平面図(上面図)である。なお、図3では、視認の便宜上、ジャイロ素子を省略している。図4は、図1に示すジャイロ素子の平面図である。図5は、図1に示すジャイロ素子の電極配置を示す平面図(上面図)である。図6は、図1に示すジャイロ素子の電極配置を示す平面図(上側から見た透過図)である。図7および図8は、図1に示すジャイロ素子の動作を説明するための概略図である。
図4〜図6に示すように、機能素子としてのジャイロ素子2は、振動片3と、振動片3に形成された電極とを有している。
振動片3の構成材料としては、例えば、水晶、タンタル酸リチウム、ニオブ酸リチウムなどの圧電材料が挙げられる。これらの中でも、振動片3の構成材料としては、水晶を用いることが好ましい。水晶を用いることで、他の材料と比較して優れた周波数温度特性を有するジャイロ素子2が得られる。なお、以下では、振動片3を水晶で構成した場合について説明する。
図5および図6に示すように、振動片3は、電極として、第1検出信号電極411と、第1検出信号端子412と、第1検出接地電極(検出接地電極)421と、第1検出接地端子422と、第2検出信号電極431と、第2検出信号端子432と、第2検出接地電極(検出接地電極)441と、第2検出接地端子442と、駆動信号電極451と、駆動信号端子452と、駆動接地電極461と、駆動接地端子462と、を有している。なお、図5および図6では、説明の便宜上、第1検出信号電極411と第2検出信号電極431および第1検出信号端子412と第2検出信号端子432、第1検出接地電極421と第2検出接地電極441および第1検出接地端子422と第2検出接地端子442、駆動信号電極451および駆動信号端子452、駆動接地電極461および駆動接地端子462を、それぞれ異なるハッチングで図示している。また、振動片3の側面に形成されている電極を太線で図示している。
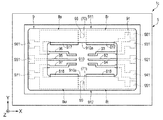
次に、図1〜図3に戻り、支持部9の構成について説明する。支持部9は、従来から知られるTAB(Tape Automated Bonding)実装用の光透過性を有する基板であり、ジャイロ素子2を支持するものである。支持部9は、枠状の基材(支持基板)91と、基材91に設けられた6本の支持リード92,93,94,95,96,97(ボンディングリード(配線)ともいう)、および導電パターンとしてのシールド部8a,8bを有している。
パッケージ5は、上面に開口する凹部61を有する箱状のベース(基体)6と、凹部61の開口を塞いでベース6に接合された板状のリッド(蓋体)7と、を有している。そして、凹部61の開口がリッド7によって塞がれることにより形成された内部空間S内に上述したジャイロ素子2が収納されている。内部空間Sの雰囲気は、特に限定されないが、本実施形態では、真空状態(例えば、10Pa以下の減圧状態)となっている。
次に、図9〜図15を参照して、上述した実施形態1に係るジャイロセンサー1の支持部9の変形例を説明する。ここで、図9から図14は、支持部の変形例1から変形例6を示す平面図(上面図)であり、図9は変形例1、図10は変形例2、図11は変形例3、図12は変形例4、図13は変形例5、図14は変形例6を示す。なお、図9〜図14は、支持部9を部分的に平面視した図を示しており、それぞれ支持リード92,93,94,95,96,97を介した反対側にも同様な構成を有している。図15は、支持部の変形例7を示す平面図(上面図)である。また、以下の説明では、上述した第1実施形態と同様な構成については、同符号を付し、その説明を省略したり簡略化したりすることがある。
先ず、図9を参照して支持部9の変形例1を説明する。図9に示すように、変形例1に係る支持部9は、第1実施形態と同様に、枠状の基材(支持基板)91と、基材91に設けられた6本の支持リード92,93,94,95,96,97(支持リード94,97は不図示)、およびシールド部8cを有している。
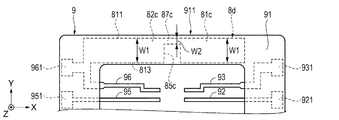
先ず、図10を参照して支持部9の変形例2を説明する。図10に示すように、変形例2に係る支持部9は、第1実施形態と同様に、枠状の基材(支持基板)91と、基材91に設けられた6本の支持リード92,93,94,95,96,97(支持リード94,97は不図示)、およびシールド部8dを有している。
先ず、図11を参照して支持部9の変形例3を説明する。図11に示すように、変形例3に係る支持部9は、第1実施形態と同様に、枠状の基材(支持基板)91と、基材91に設けられた6本の支持リード92,93,94,95,96,97(支持リード94,97は不図示)、およびシールド部8eを有している。
先ず、図12を参照して支持部9の変形例4を説明する。図12に示すように、変形例4に係る支持部9は、第1実施形態と同様に、枠状の基材(支持基板)91と、基材91に設けられた6本の支持リード92,93,94,95,96,97(支持リード94,97は不図示)、およびシールド部8fを有している。
先ず、図13を参照して支持部9の変形例5を説明する。図13に示すように、変形例5に係る支持部9は、第1実施形態と同様に、枠状の基材(支持基板)91と、基材91に設けられた6本の支持リード92,93,94,95,96,97(支持リード94,97は不図示)、およびシールド部8gを有している。
先ず、図14を参照して支持部9の変形例6を説明する。図14に示すように、変形例6に係る支持部9は、第1実施形態と同様に、枠状の基材(支持基板)91と、基材91に設けられた6本の支持リード92,93,94,95,96,97(支持リード94,97は不図示)、およびシールド部8hを有している。
先ず、図15を参照して支持部9の変形例7を説明する。図15に示すように、変形例7に係る支持部9は、第1実施形態と同様に、枠状の基材(支持基板)91と、基材91に設けられた6本の支持リード92,93,94,95,96,97、およびシールド部8a,8bを有している。
次に、本発明の電子デバイスとして例示するジャイロセンサーの第2実施形態に係る構成について、図16を参照して説明する。図16は、本発明の電子デバイスとして例示するジャイロセンサーの第2実施形態に係る平面図(上面図)である。以下、本発明の電子デバイスとして例示するジャイロセンサーの第2実施形態について説明するが、前述した実施形態との相違点を中心に説明し、同様の構成や事項は、同符号を付したりその説明を省略したりすることがある。本第2実施形態は、支持部の中間部の構成が異なること以外は、前述した第1実施形態と略同様の構成である。
次に、本発明の電子デバイスとして例示するジャイロセンサーの第3実施形態に係る構成について、図17を参照して説明する。図17は、本発明の電子デバイスとして例示するジャイロセンサーの第3実施形態に係る平面図(上面図)である。以下、本発明の電子デバイスとして例示するジャイロセンサーの第3実施形態について説明するが、前述した第1実施形態との相違点を中心に説明し、同様の構成や事項は、同符号を付したりその説明を省略したりすることがある。本第3実施形態は、支持部におけるシールド部の構成が異なること以外は、前述した第1実施形態と略同様の構成である。
次に、本発明の電子デバイスとして例示するジャイロセンサーの第4実施形態に係る構成について、図18を参照して説明する。図18は、本発明の電子デバイスとして例示するジャイロセンサーの第4実施形態に係る平面図(上面図)である。以下、本発明の電子デバイスとして例示するジャイロセンサーの第4実施形態について説明するが、前述した第1実施形態との相違点を中心に説明し、同様の構成や事項は、同符号を付したりその説明を省略したりすることがある。本第4実施形態は、支持部の中間部の構成が異なること以外は、前述した第1実施形態と略同様の構成である。
次に、本発明の電子デバイスとして例示するジャイロセンサーの第5実施形態に係る構成について、図19を参照して説明する。図19は、本発明の電子デバイスとして例示するジャイロセンサーの第5実施形態に係る平面図(上面図)である。以下、本発明の電子デバイスとして例示するジャイロセンサーの第5実施形態について説明するが、前述した第4実施形態との相違点を中心に説明し、同様の構成や事項は、同符号を付したりその説明を省略したりすることがある。本第5実施形態は、支持部の中間部(シールド部)の構成が異なること以外は、前述した第4実施形態と略同様の構成である。
また、支持部9の基材(支持基板)91の内周縁910aから第2方向(Y軸方向)に、開口部910に鍔状に張り出した突出部816,817によって、シールド部の面積が大きくなるため、より電気的ノイズ(放射ノイズ)の遮蔽効果(シール効果)を高めることができる。また、シールド部が金属で構成されているため、例えば紫外線やレーザー光などの光を遮蔽することが可能となる。
また、前述の図18で示した第4実施形態においても、第2凹部70,71を設ける構成を用いることができ、同様な効果を得ることができる。
次いで、電子デバイスとしてのジャイロセンサー1を適用した電子機器について、図20〜図22に基づき、詳細に説明する。
次いで、物理量センサーとしてのジャイロセンサー1を適用した移動体について、図23に基づき、詳細に説明する。
Claims (8)
- ベースと、
第1方向に互いに離間して配置されている第1取付部および第2取付部と、前記第1取付部と前記第2取付部とを接続し、前記第1方向に沿って対向する二つの中間部と、を含み、前記第1取付部および前記第2取付部において前記ベースに取り付けられている枠状の支持部と、
前記支持部に支持されている機能素子と、
を備え、
前記二つの中間部のそれぞれは、導電性部材から構成された導電パターンを備え、
前記導電パターンは、前記第1方向と直交する第2方向の幅W1を有する幅広部と、前記幅W1より狭い幅W2の幅狭部と、を備えており、
前記支持部は、支持基板を含み、
前記導電パターンは、前記支持基板に積層され、
前記幅狭部は、前記中間部の前記第1方向に沿った前記導電パターンの外周縁から切り込まれたスリット部としての凹部によって構成され、
前記第1取付部は、導電性部材から構成された第1取付部側接続端子を備え、
前記第2取付部は、前記導電パターンから延設された第2取付部側接続端子を備え、
前記第1取付部側接続端子および前記第2取付部側接続端子と、前記ベースに設けられた、導電性部材から構成されたベース側接続端子とが接合されることによって、前記支持部が前記ベースに取り付けられていることを特徴とする電子デバイス。 - 前記支持基板は、前記中間部の前記第1方向に沿った前記支持基板の外周縁から切り込まれたスリット部としての凹部が設けられていることを特徴とする請求項1に記載の電子デバイス。
- 前記幅広部は、前記幅狭部を介して前記第1方向の一方側に設けられている第1幅広部と、他方側に設けられている第2幅広部と、を備えていることを特徴とする請求項1または2に記載の電子デバイス。
- 前記導電パターンは、固定電位に接続されることを特徴とする請求項1ないし請求項3のいずれか一項に記載の電子デバイス。
- 前記機能素子は、物理量を検出する検出電極を含み、
平面視で、前記導電パターンは、前記検出電極の少なくとも一部に重なって配置されていることを特徴とする請求項1ないし請求項4のいずれか一項に記載の電子デバイス。 - 平面視で、前記導電パターンは、前記支持基板から前記第2方向に張り出した突出部を備えていることを特徴とする請求項1ないし請求項5のいずれか一項に記載の電子デバイス。
- 請求項1ないし請求項6のいずれか一項に記載の電子デバイスを備えていることを特徴とする電子機器。
- 請求項1ないし請求項6のいずれか一項に記載の電子デバイスを備えていることを特徴とする移動体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015141925A JP6668626B2 (ja) | 2015-07-16 | 2015-07-16 | 電子デバイス、電子機器、および移動体 |
| US15/207,765 US10156443B2 (en) | 2015-07-16 | 2016-07-12 | Electronic device, electronic apparatus, and moving object |
| CN201610562034.9A CN106352861B (zh) | 2015-07-16 | 2016-07-15 | 电子装置、电子设备以及移动体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015141925A JP6668626B2 (ja) | 2015-07-16 | 2015-07-16 | 電子デバイス、電子機器、および移動体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017026336A JP2017026336A (ja) | 2017-02-02 |
| JP2017026336A5 JP2017026336A5 (ja) | 2018-08-23 |
| JP6668626B2 true JP6668626B2 (ja) | 2020-03-18 |
Family
ID=57775699
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015141925A Active JP6668626B2 (ja) | 2015-07-16 | 2015-07-16 | 電子デバイス、電子機器、および移動体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10156443B2 (ja) |
| JP (1) | JP6668626B2 (ja) |
| CN (1) | CN106352861B (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6620243B2 (ja) * | 2016-07-26 | 2019-12-11 | 京セラ株式会社 | 角速度センサ、センサ素子および多軸角速度センサ |
| JP7251383B2 (ja) * | 2019-07-29 | 2023-04-04 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
| JP7251385B2 (ja) | 2019-07-30 | 2023-04-04 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
| JP7276008B2 (ja) | 2019-08-29 | 2023-05-18 | セイコーエプソン株式会社 | 振動デバイス、電子機器および移動体 |
| JP2021067624A (ja) * | 2019-10-28 | 2021-04-30 | セイコーエプソン株式会社 | 慣性計測装置、電子機器及び移動体 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4868299B2 (ja) * | 2002-01-30 | 2012-02-01 | セイコーエプソン株式会社 | 振動子の支持装置および支持構造 |
| JP4852216B2 (ja) | 2002-01-30 | 2012-01-11 | セイコーエプソン株式会社 | 振動型ジャイロスコープ |
| JP4543816B2 (ja) * | 2004-05-19 | 2010-09-15 | セイコーエプソン株式会社 | 圧電振動片、振動型ジャイロスコープ |
| JP4682671B2 (ja) | 2005-03-31 | 2011-05-11 | セイコーエプソン株式会社 | 圧電デバイス |
| JP4442526B2 (ja) * | 2005-07-20 | 2010-03-31 | セイコーエプソン株式会社 | 圧電振動ジャイロセンサ及び圧電振動ジャイロセンサを備えた電子機器 |
| US8080925B2 (en) * | 2008-09-23 | 2011-12-20 | Custom Sensors & Technologies, Inc. | Inertial sensor with dual cavity package and method of fabrication |
| JP2010223763A (ja) | 2009-03-24 | 2010-10-07 | Seiko Epson Corp | 物理量検出デバイス |
| JP2011094987A (ja) * | 2009-10-27 | 2011-05-12 | Panasonic Electric Works Co Ltd | 回路モジュールおよび回路モジュールの製造方法 |
| JP5838543B2 (ja) * | 2010-09-30 | 2016-01-06 | セイコーエプソン株式会社 | センサーデバイス、モーションセンサー、および電子機器 |
| JP2013104806A (ja) * | 2011-11-15 | 2013-05-30 | Citizen Holdings Co Ltd | 振動子デバイス |
| JP5838749B2 (ja) * | 2011-11-16 | 2016-01-06 | セイコーエプソン株式会社 | 振動子、振動デバイスおよび電子機器 |
| JP2014202562A (ja) * | 2013-04-03 | 2014-10-27 | 株式会社デンソー | 力学量センサ |
| JP6237982B2 (ja) * | 2013-04-23 | 2017-11-29 | セイコーエプソン株式会社 | 物理量センサー、電子機器及び移動体 |
| JP6304974B2 (ja) * | 2013-08-27 | 2018-04-04 | 三菱電機株式会社 | 半導体装置 |
-
2015
- 2015-07-16 JP JP2015141925A patent/JP6668626B2/ja active Active
-
2016
- 2016-07-12 US US15/207,765 patent/US10156443B2/en active Active
- 2016-07-15 CN CN201610562034.9A patent/CN106352861B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017026336A (ja) | 2017-02-02 |
| CN106352861B (zh) | 2021-06-08 |
| US10156443B2 (en) | 2018-12-18 |
| US20170016725A1 (en) | 2017-01-19 |
| CN106352861A (zh) | 2017-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7501607B2 (ja) | 振動デバイス、電子機器および移動体 | |
| JP6668626B2 (ja) | 電子デバイス、電子機器、および移動体 | |
| US20130221804A1 (en) | Sensor Element, Sensor Device, And Electronic Apparatus | |
| US11650054B2 (en) | Vibrator device, electronic apparatus, and vehicle | |
| US10690500B2 (en) | Sensor element, sensor, electronic apparatus, and vehicle | |
| JP2015087262A (ja) | 振動素子、振動子、電子機器および移動体 | |
| JP6318550B2 (ja) | 振動片、角速度センサー、電子機器および移動体 | |
| US9587944B2 (en) | Angular velocity sensor, electronic apparatus, and moving object | |
| JP6167474B2 (ja) | センサーデバイスおよび電子機器 | |
| JP2018165642A (ja) | 振動デバイス、電子機器および移動体 | |
| US9599469B2 (en) | Angular velocity sensor, electronic apparatus, and moving object | |
| JP2017015584A (ja) | 電子デバイス、電子デバイスの製造方法、電子機器、および移動体 | |
| JP2015099061A (ja) | 物理検出装置の製造方法、振動素子、物理検出装置および電子機器 | |
| JP6398730B2 (ja) | 物理量センサー、物理量センサーの製造方法、電子機器および移動体 | |
| JP6492536B2 (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP6488639B2 (ja) | 電子デバイス、電子機器および移動体 | |
| JP6464662B2 (ja) | 物理量検出振動素子、物理量センサー、電子機器および移動体 | |
| JP6911446B2 (ja) | センサー素子、センサー、電子機器および移動体 | |
| JP6488640B2 (ja) | 電子デバイス、電子機器および移動体 | |
| JP6939007B2 (ja) | センサー、電子機器および移動体 | |
| JP2018105809A (ja) | センサー素子、物理量センサー、電子機器および移動体 | |
| JP2016044977A (ja) | センサー素子、センサーデバイス、電子機器および移動体 | |
| JP2013170851A (ja) | センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器 | |
| JP2014107712A (ja) | 振動片、振動子、発振器、電子機器及び移動体 | |
| JP2013072852A (ja) | センサー素子、センサー素子の製造方法、センサーデバイスおよび電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180705 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180705 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180905 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190404 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190416 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190611 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191029 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6668626 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |