JP6657600B2 - ロボットシステム、及び非常停止処理装置 - Google Patents
ロボットシステム、及び非常停止処理装置 Download PDFInfo
- Publication number
- JP6657600B2 JP6657600B2 JP2015111142A JP2015111142A JP6657600B2 JP 6657600 B2 JP6657600 B2 JP 6657600B2 JP 2015111142 A JP2015111142 A JP 2015111142A JP 2015111142 A JP2015111142 A JP 2015111142A JP 6657600 B2 JP6657600 B2 JP 6657600B2
- Authority
- JP
- Japan
- Prior art keywords
- emergency stop
- switch
- state
- processing device
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0081—Programme-controlled manipulators with master teach-in means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/42—Recording and playback systems, i.e. in which the programme is recorded from a cycle of operations, e.g. the cycle of operations being manually controlled, after which this record is played back on the same machine
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/42—Recording and playback systems, i.e. in which the programme is recorded from a cycle of operations, e.g. the cycle of operations being manually controlled, after which this record is played back on the same machine
- G05B19/425—Teaching successive positions by numerical control, i.e. commands being entered to control the positioning servo of the tool head or end effector
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/36—Nc in input of data, input key till input tape
- G05B2219/36162—Pendant control box
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39447—Dead man switch
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/50—Machine tool, machine tool null till machine tool work handling
- G05B2219/50198—Emergency stop
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/03—Teaching system
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Manipulator (AREA)
- General Physics & Mathematics (AREA)
- Numerical Control (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Fuzzy Systems (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
Description
この構成により、ロボットシステムは、教示装置が備える第1操作部によりロボットの動作を非常停止させ、制御装置とは別体の第2操作部であって非常停止処理装置が備える第2操作部により、第1操作部が操作された後、ロボットの動作を継続させる。これにより、ロボットシステムは、教示作業の効率を向上させることができる。
この構成により、ロボットシステムでは、制御装置と教示装置との間に通信可能に接続されている非常停止処理装置により、第1操作部が操作された後、ロボットの動作を継続させる。これにより、ロボットシステムは、制御装置と教示装置との間に通信可能に接続されている非常停止処理装置により、教示作業の効率を向上させることができる。
この構成により、ロボットシステムは、報知部により第2操作部が操作されたことを報知する。これにより、ロボットシステムは、報知部により第2操作部が操作されたことをユーザーに報知することができる。その結果、ロボットシステムは、第2操作部が操作されていない状態でユーザーが教示装置を取り外してしまうことを抑制することができる。
この構成により、ロボットシステムは、非常停止処理装置が備える第3操作部によりロボットの動作を非常停止させる。これにより、ロボットシステムは、教示装置が取り外されている状態であってもロボットを非常停止させることができる。
この構成により、ロボットシステムは、非常停止処理装置が備える第2操作部によりリレーを切り替える。これにより、ロボットシステムは、第2操作部によるリレーの切り替えに基づいて第1操作部が操作された後、ロボットの動作を継続させることができる。
この構成により、ロボットシステムは、第1プロセッサーと第2プロセッサーにより、リレーを切り替える。これにより、ロボットシステムは、第1プロセッサーと第2プロセッサーによりリレーが切り替えられた結果として、第1操作部が操作された後、ロボットの動作を継続させることができる。
この構成により、ロボットシステムは、第1プロセッサーに第2プロセッサーを監視させ、第2プロセッサーに第1プロセッサーを監視させる。これにより、ロボットシステムは、第1プロセッサーと第2プロセッサーを監視することができる。
この構成により、ロボットシステムでは、第1プロセッサーにより第1リレーを切り替え、第2プロセッサーにより第2リレーを切り替える。これにより、ロボットシステムは、第1リレーと第2リレーをそれぞれ、異なるプロセッサーによって切り替えることができる。
この構成により、ロボットシステムでは、複数の固定部のいずれかを用いて治具を非常停止処理装置に固定する。これにより、ロボットシステムは、固定する場所に適した固定部を用いて非常停止処理装置を固定することができる。
この構成により、非常停止処理装置は、制御装置とは別体の第2操作部により、第1操作部が操作された後、ロボットの動作を継続させる。これにより、非常停止処理装置は、教示作業の効率を向上させることができる。
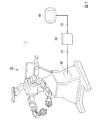
以下、本発明の実施形態について、図面を参照して説明する。図1は、本実施形態に係るロボットシステム1の一例を示す構成図である。ロボットシステム1は、ロボット20と、教示装置40と、非常停止処理装置50を備える。また、ロボット20は、制御装置30を備える。
ロボットシステム1では、制御装置30と非常停止処理装置50がケーブルC1によって通信可能に接続されている。また、ロボットシステム1では、非常停止処理装置50と教示装置40がケーブルC2によって通信可能に接続されている。すなわち、ロボットシステム1では、非常停止処理装置50が、制御装置30と教示装置40の間に通信可能に接続されている。ケーブルC1及びケーブルC2を介した有線通信は、例えば、イーサネット(登録商標)やUSB(Universal Serial Bus)等の規格によって行われる。
ロボット20は、制御装置30を備えた双腕ロボットである。双腕ロボットは、2本のアーム(腕)を備えるロボットである。それぞれのアームは、エンドエフェクターと、マニピュレーターと、複数のアクチュエーターによって構成される。なお、ロボット20は、双腕ロボットに代えて、単腕ロボットであってもよく、パラレルリンクロボットであってもよく、直交軸ロボットであってもよく、単軸ロボットであってもよく、スカラロボットであってもよい。単腕ロボットは、1本のアームを備えるロボットである。
以下、図3〜図5を参照し、ロボットシステム1における非常停止回路の構成の具体例について説明する。図3は、ロボットシステム1における非常停止回路の構成の一例を示す図である。図3(A)には、非常停止回路Aの構成の一例を示した。また、図3(B)には、非常停止回路Bの構成の一例を示した。
以下、非常停止回路Aが備えるスイッチR3及びスイッチR4と、非常停止回路Bが備えるスイッチR7及びスイッチR8とのそれぞれが溶着していないか否かをチェックする溶着チェック処理について説明する。
非常停止処理装置50が備える第1CPU51は、時刻を計時する図示しない第1計時部を備える。また、第1CPU51は、第2CPU52に対して、第1計時部により計時される時刻に基づいて所定のクロック周期のクロック信号を送信し続ける。また、第1CPU51は、第2CPU52からクロック信号を受信する。第1CPU51は、受信したクロック信号のクロック周期が変化した場合、第2CPU52が故障したと判定し、制御装置30にロボット20を非常停止させる。そして、第1CPU51は、表示部L2に光を点灯させる。
以下では、図7及び図8を参照し、工場内等のロボット20に作業を行わせる場所における非常停止処理装置50の固定について説明する。図7は、非常停止処理装置50の外観の一例と、非常停止処理装置50を固定するための治具の一例を示す図である。図7(A)は、非常停止処理装置50において第2非常停止解除ボタンB1が設けられた面を上面とした場合の非常停止処理装置50の上面図である。図7(A)に示した非常停止処理装置50の上面図については、図2においてすでに説明しているため説明を省略する。
また、上記のプログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、上記のプログラムは、前述した機能をコンピューターシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
Claims (6)
- ロボットと、
前記ロボットを制御する制御回路を有する制御装置と、
前記制御装置と電気的に接続されている第1経路と、前記第1経路に設けられている第1スイッチと、前記制御装置と電気的に接続されており、前記第1経路とは異なる第2経路と、前記第1経路と前記第2経路との間に接続されている第3経路と、前記第3経路に設けられている非常停止解除スイッチと、を有する処理装置回路を備えた非常停止処理装置と、
第2スイッチを有し、前記処理装置回路と電気的に接続されている教示装置回路を備え、前記ロボットの動作を教示する教示装置と、
を備え、
前記非常停止処理装置は、前記制御装置及び前記教示装置とは別体であり、
前記非常停止解除スイッチは、前記第1スイッチと前記教示装置回路との間に接続されており、
前記第1スイッチまたは前記第2スイッチの状態がオフである場合、前記ロボットの動作は停止し、
前記第1スイッチの状態がオンであり、かつ、前記非常停止解除スイッチの状態がオンである場合、前記制御回路と、前記第1経路と、前記第2経路と、前記第3経路とが閉回路を形成し、前記第1スイッチの状態がオフであり、かつ、前記非常停止解除スイッチの状態がオンである場合、前記制御回路と、前記第1経路と、前記第2経路と、前記第3経路とは、開回路を形成する、
ロボットシステム。 - 前記非常停止処理装置は、前記非常停止解除スイッチの状態がオンであることを報知する報知部を備える、
請求項1に記載のロボットシステム。 - 前記非常停止処理装置は、前記非常停止解除スイッチの状態を切り替える非常停止解除ボタンと、前記第1スイッチの状態を切り替える非常停止ボタンと、を備える、
請求項1または2に記載のロボットシステム。 - 前記第1経路は、第3スイッチと、前記第3スイッチと並列に設けられた第4スイッチと、を有し、
前記非常停止解除スイッチは、第1非常停止解除スイッチと、前記第1非常停止解除スイッチに対して直列に設けられた第2非常停止解除スイッチと、を有し、
前記非常停止処理装置は、前記第3スイッチ、前記第4スイッチ、前記第1非常停止解除スイッチの切り替えを行う第1プロセッサーと、前記第2非常停止解除スイッチの切り替えを行う第2プロセッサーと、を備える、
請求項1から3のうちいずれか一項に記載のロボットシステム。 - 前記非常停止処理装置では、前記第1プロセッサーと前記第2プロセッサーが監視し合う、
請求項4に記載のロボットシステム。 - 前記非常停止処理装置は、前記非常停止処理装置に治具を固定する固定部を複数有する、
請求項1から5のうちいずれか一項に記載のロボットシステム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015111142A JP6657600B2 (ja) | 2015-06-01 | 2015-06-01 | ロボットシステム、及び非常停止処理装置 |
| CN201610373460.8A CN106182083B (zh) | 2015-06-01 | 2016-05-31 | 机器人系统以及紧急停止处理装置 |
| US15/168,653 US9919419B2 (en) | 2015-06-01 | 2016-05-31 | Robot system and emergency stop processing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015111142A JP6657600B2 (ja) | 2015-06-01 | 2015-06-01 | ロボットシステム、及び非常停止処理装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016221635A JP2016221635A (ja) | 2016-12-28 |
| JP2016221635A5 JP2016221635A5 (ja) | 2018-06-28 |
| JP6657600B2 true JP6657600B2 (ja) | 2020-03-04 |
Family
ID=57397788
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015111142A Active JP6657600B2 (ja) | 2015-06-01 | 2015-06-01 | ロボットシステム、及び非常停止処理装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9919419B2 (ja) |
| JP (1) | JP6657600B2 (ja) |
| CN (1) | CN106182083B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3610335B1 (de) * | 2017-07-04 | 2023-06-21 | Siemens Aktiengesellschaft | Nothalt-vorrichtung für eine automatisierungsanlage |
| JP6897443B2 (ja) * | 2017-09-13 | 2021-06-30 | ブラザー工業株式会社 | 制御システム、副制御装置及び制御方法 |
| JP2020023029A (ja) * | 2018-08-08 | 2020-02-13 | 株式会社デンソーウェーブ | ロボット操作装置 |
| TWI703022B (zh) * | 2018-09-26 | 2020-09-01 | 東元電機股份有限公司 | 應用於機械手臂之自動復歸控制系統與方法 |
| CN111002301A (zh) * | 2018-10-08 | 2020-04-14 | 东元电机股份有限公司 | 应用于机械手臂的自动复归控制系统与方法 |
| CN109799771B (zh) * | 2018-12-29 | 2021-01-05 | 深圳市越疆科技有限公司 | 一种工业机器人的控制系统、方法及装置 |
| CN113843785A (zh) * | 2020-06-28 | 2021-12-28 | 北京配天技术有限公司 | 一种机器人紧急停止处理方法和系统 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60218110A (ja) | 1984-04-14 | 1985-10-31 | Toyota Motor Corp | ロボツト制御システム |
| JPS61281597A (ja) * | 1985-06-07 | 1986-12-11 | 松下電器産業株式会社 | 電子機器筐体の取付装置 |
| JPH04330501A (ja) | 1991-05-02 | 1992-11-18 | Mori Seiki Co Ltd | 自動加工機械のコントローラの非常停止装置 |
| JP2672417B2 (ja) * | 1991-08-15 | 1997-11-05 | ファナック株式会社 | 教示操作盤の非常停止回路 |
| JPH0611982U (ja) * | 1992-07-14 | 1994-02-15 | シチズン時計株式会社 | ロボットの制御装置 |
| JPH07164373A (ja) | 1993-10-06 | 1995-06-27 | Mitsubishi Electric Corp | 産業用ロボットの防油構造 |
| TW267128B (ja) | 1993-10-06 | 1996-01-01 | Mitsubishi Electric Machine | |
| JPH109718A (ja) * | 1996-06-26 | 1998-01-16 | Hitachi Ltd | 空気調和装置 |
| JP3064940B2 (ja) * | 1997-02-07 | 2000-07-12 | 松下電器産業株式会社 | ロボットの安全装置 |
| JP2001337761A (ja) | 2000-05-26 | 2001-12-07 | Pfu Ltd | 状態監視装置 |
| JP2003311665A (ja) | 2002-04-17 | 2003-11-05 | Yaskawa Electric Corp | ロボットシステム及び制御装置 |
| JP3950832B2 (ja) * | 2002-10-08 | 2007-08-01 | ファナック株式会社 | ロボット制御装置 |
| JP4085952B2 (ja) * | 2003-10-20 | 2008-05-14 | 株式会社安川電機 | ロボットシステム |
| JP4292404B2 (ja) * | 2004-01-07 | 2009-07-08 | 株式会社安川電機 | 駆動軸操作システム |
| DE102004050908A1 (de) * | 2004-10-19 | 2006-05-18 | Siemens Ag | Vorrichtung zur Kommunikation mit einer Anlage |
| JP4202335B2 (ja) * | 2005-03-22 | 2008-12-24 | ファナック株式会社 | 非常停止回路 |
| SE531329C2 (sv) * | 2005-06-20 | 2009-02-24 | Yaskawa Denki Seisakusho Kk | Automatiskt maskinsystem och metod för att kontrollera dess kommunikation |
| JP4137932B2 (ja) * | 2005-10-28 | 2008-08-20 | ファナック株式会社 | ロボット制御装置 |
| JP5643526B2 (ja) * | 2010-03-18 | 2014-12-17 | 株式会社ダイヘン | 機械の操作装置 |
| JP5492617B2 (ja) | 2010-03-18 | 2014-05-14 | 株式会社ダイヘン | 可動機械制御装置及び可動機械制御システム |
| EP2835231A4 (en) * | 2012-04-02 | 2016-02-17 | Yaskawa Denki Seisakusho Kk | ROBOTIC SYSTEM AND ROBOT CONTROL DEVICE |
| JP5664629B2 (ja) * | 2012-10-19 | 2015-02-04 | 株式会社安川電機 | ロボットシステムおよび加工品の製造方法 |
| CN104002305B (zh) * | 2013-02-27 | 2017-07-14 | 株式会社大亨 | 机器人控制装置 |
| JP6351940B2 (ja) | 2013-02-27 | 2018-07-04 | 株式会社ダイヘン | ロボット制御装置 |
-
2015
- 2015-06-01 JP JP2015111142A patent/JP6657600B2/ja active Active
-
2016
- 2016-05-31 US US15/168,653 patent/US9919419B2/en active Active
- 2016-05-31 CN CN201610373460.8A patent/CN106182083B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN106182083A (zh) | 2016-12-07 |
| US20160346919A1 (en) | 2016-12-01 |
| US9919419B2 (en) | 2018-03-20 |
| JP2016221635A (ja) | 2016-12-28 |
| CN106182083B (zh) | 2021-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6657600B2 (ja) | ロボットシステム、及び非常停止処理装置 | |
| JP2004148488A (ja) | ロボット制御装置 | |
| JP2017077606A (ja) | ネットワークを介して接続された複数の制御装置を備えるロボットシステム | |
| KR20110055684A (ko) | 통신 모듈, 통신 시스템 및 공기 조화기 | |
| JP2005157665A (ja) | セーフティコントローラ、それを用いたシステムおよび増設ユニット | |
| JP2014213400A (ja) | ロボット装置及びロボット装置の制御方法 | |
| JP6475980B2 (ja) | 信号モジュール及び信号中継装置 | |
| JP2006302614A (ja) | 安全仕様の制御装置 | |
| JP5924069B2 (ja) | 監視システム | |
| JP5983420B2 (ja) | 故障通知装置、故障通知方法、及び故障通知プログラム | |
| JP6856416B2 (ja) | プロセス制御システム | |
| JP5026920B2 (ja) | パケット交換装置 | |
| JP2005261197A (ja) | 無停電電源システム | |
| JP2004341690A (ja) | 操作盤 | |
| JP6537239B2 (ja) | ナースコールシステム | |
| JP5370222B2 (ja) | 冗長構成を有する通信装置及びその稼働待機切替方法 | |
| KR101259859B1 (ko) | 지능형 릴레이 제어 장치 | |
| JP2005295246A (ja) | 通信切換装置 | |
| JP2012150555A (ja) | 監視システム | |
| JP4238706B2 (ja) | セーフティコントローラ | |
| JP6852884B2 (ja) | 監視システム、監視装置、監視方法、およびプログラム | |
| JP2019514709A (ja) | ロボット制御システムおよび方法 | |
| JP2011049835A (ja) | ネットワーク故障検出装置、ネットワーク故障検出プログラム | |
| JP2002319927A (ja) | 伝送路切替装置及び伝送システム | |
| JP2017072387A (ja) | 試験装置、試験方法、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180518 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180518 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180905 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190326 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190806 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190930 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6657600 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |