以下に、本発明に係る作業車両の実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能、かつ、容易なもの、あるいは実質的に同一のものが含まれる。
図1は、実施形態に係る作業車両である苗移植機1を示す側面図である。図2は、図1に示す苗移植機1の平面図である。図3は、図1に示す苗移植機1の正面図である。なお、以下の説明においては、苗移植機1の前進方向側を機体前側とし、前進方向側とは反対側を機体後側とし、苗移植機1の上下方向における上側を機体上側とし、上下方向における下側を機体下側とする。また、機体前側から機体後側に向かって視た場合を機体前後方向視とし、機体左側から機体右側に向かって視た(あるいは機体右側から機体左側に向かって視た)場合を機体左右方向視とし、機体上側から機体下側に向かって視た場合を機体上下方向視とする。
実施形態に係る苗移植機1の走行車体2は、左右一対の前輪3と、左右一対の後輪4と、を有している。走行車体2は、例えば、走行時には前輪3、及び後輪4が駆動する四輪駆動とすることにより、圃場や道路を走行可能となっている。また、走行車体2の機体後側には、苗植付部昇降機構20によって上下方向に昇降可能な苗植付部30が備えられている。
走行車体2は、メインフレーム5と、メインフレーム5の機体上側に搭載されたエンジン6と、エンジン6で発生した動力を駆動輪(本実施形態では前輪3、及び後輪4)と苗植付部30とに伝達する動力伝達装置7と、を備えている。つまり、本実施形態に係る苗移植機1では、動力源であるエンジン6で発生した動力は、走行車体2を前進や後進させるために使用されるのみでなく、苗植付部30を駆動させるためにも使用される。
エンジン6は、機体左右方向における走行車体2の略中央で、かつ、作業者が乗車時に足を載せるフロアステップ8よりも機体上側に突出した状態となっている。エンジン6としては、例えば、ディーゼル機関やガソリン機関等の熱機関が用いられる。フロアステップ8は、機体前後方向において、走行車体2の機体前側に設けられている。本実施形態におけるフロアステップ8は、走行車体2の機体前端とエンジン6の機体後側との間にわたって設けられている。フロアステップ8は、メインフレーム5上に取り付けられている。フロアステップ8のうち、後述する操縦席11の近傍の少なくとも一部は、作業者の靴に付着した泥などを圃場に落とせるように、機体上下方向視において格子状に形成されている。フロアステップ8の機体後側には、後輪4のフェンダを兼ねるリアステップ9が設けられている。リアステップ9は、機体前側から機体後側に向かうにつれて機体上側に向かって上昇する傾斜面(後上り傾斜面)を有している。リアステップ9は、機体左右方向において、エンジン6の両側方に配置され、エンジン6を挟んだ状態となっている。エンジン6は、エンジンカバー10により覆われている。エンジンカバー10の機体上側には、操縦席11が設けられている。
動力伝達装置7は、エンジン6からの動力を油圧式無段変速機13に伝達するベルト式動力伝達機構12と、エンジン6から伝達される動力を変速する変速装置である油圧式無段変速機13と、ミッションケース14と、を有している。
油圧式無段変速機13は、HST(Hydro Static Transmission)といわれる静油圧式の無段変速装置として構成されている。油圧式無段変速機13は、後述する主変速操作部材74が作業者により操作されることで、出力(回転速度)、及び出力方向(回転方向)を変更可能である。つまり、油圧式無段変速機13は、回転速度や回転方向を変更することにより、走行車体2の前後進や移動速度を変更可能である。
ミッションケース14は、油圧式無段変速機13によって変速されたエンジン6からの動力を各部に伝達する伝動装置である。ミッションケース14は、路上走行時や植付作業時における走行速度(移動速度)を切り替える副変速機構(図示省略)を有している。ミッションケース14は、副変速レバー(図示省略)が作業者により操作されることで、走行車体2の走行速度(移動速度)を、路上走行時における路上走行速度(植付作業時の移動速度よりも高速で、路上走行に適した速度)、植付作業時における苗植付速度(路上走行時の移動速度よりも低速で、植付作業に適した速度)に切り替え可能である。
前輪ファイナルケース15には、後述する操舵ハンドル73の転舵操作に応じて前輪3を転舵可能に、前輪3が連結されている。後輪ギアケース16には、後輪4が連結されている。
苗植付部昇降機構20は、昇降リンク21を備えている。昇降リンク21は、走行車体2の機体後側と苗植付部30とを連結させる平行リンク機構22を有している。平行リンク機構22は、リンクフレームベース23、及び苗植付部30のそれぞれに対して、機体上下方向に回動自在に連結されることにより、走行車体2に対して苗植付部30を昇降可能である。
また、苗植付部昇降機構20は、油圧昇降シリンダ24を備えている。油圧昇降シリンダ24は、油圧バルブ820(図6参照)が切り替えられることで伸縮動作し、伸縮動作によって昇降リンク21を駆動し、苗植付部30を昇降させる。油圧昇降シリンダ24は、後述する植付操作部材75が作業者により操作されることで、苗植付部30を上昇させた非作業位置、苗植付部30を下降させた対地作業位置(対地植付位置)に切り替える。また、油圧昇降シリンダ24は、圃場の状況に関する情報に基づいて苗植付部30を昇降させる。
苗植付部30は、昇降リンク21を介して走行車体2に取り付けられている。苗植付部30は、複数の区画、あるいは複数の列で苗を植え付けることが可能である。本実施形態における苗植付部30は、苗を4つの区画で植え付ける、いわゆる4条植となっている。苗植付部30は、苗載置台31と、フロート32と、苗植付装置40と、を備えている。
苗載置台31は、機体左右方向において、植付条数分の苗載せ面31aを有している。それぞれの苗載せ面31aは、機体上下方向に複数枚の土付きマット状苗を載置可能な後下がり傾斜面となっている。フロート32は、走行車体2の移動に伴って、圃場上を滑走して整地するものである。フロート32は、機体左右方向において、機体中央側に位置するセンタフロート32aと、センタフロート32aを挟んで機体外側に位置するサイドフロート32bと、を有している。
各フロート32a,32bは、圃場表土面の凹凸に応じて前端側が上下動するように回動自在に取り付けられる。苗植付装置40は、センタフロート32aの上下動を検知する迎角制御用の回動センサ170(図5参照)を備える。苗植付装置40は、植付作業時にはセンタフロート32aの前部の上下動が回動センサ170により検知され、その検知結果に応じて制御装置150を構成するコントローラ150aにより油圧昇降シリンダ24の伸縮動作を制御する油圧バルブ820を切り替えて苗植付部30を昇降させ、苗の植付深さを所定の深さに調整することができる(図6参照)。
苗植付装置40は、苗載置台31の植付支持フレーム33によって支持され、苗載置台31の下方に配置されている。苗植付装置40は、苗載置台31に載置された苗をとって圃場に植え付ける装置である。苗植付装置40には、植込杆41と、ロータリケース42と、植付伝動ケース43と、を備えている。
植込杆41は、苗載置台31から苗をとって圃場に植え付けることができるように構成されている。植込杆41は、植付伝動ケース43に対して回転可能に連結されている。ロータリケース42は、植込杆41を回転可能に支持するとともに、植付伝動ケース43に対して回転可能に連結されている。ロータリケース42は、植込杆41の回転速度を変化させながら、植込杆41を回転させることができる不等速伝動機構(図示省略)を有している。これにより、ロータリケース42は、ロータリケース42に対する植込杆41の回転角度によって、植込杆41の回転速度を変化させながら回転させることが可能である。植付伝動ケース43は、エンジン6から苗植付部30に伝達された動力を、植込杆41に伝達可能に構成されている。
整地装置50は、圃場を整地するものである。整地装置50は、苗植付装置40の下方に設けられている。整地装置50は、植付支持フレーム33などに対して、電動モータ870(図5参照)などにより昇降自在に支持されている。整地装置50は、機体左右方向において、機体中央側に位置するセンタロータ51と、センタロータ51よりも機体後側かつ機体外側に位置するサイドロータ52と、伝動機構53と、を備えている。センタロータ51、及びサイドロータ52は、センタフロート32a、及びサイドフロート32bよりも機体前側に配置されている。センタロータ51は、伝動機構53と、後輪ギアケース16に連結された伝動軸54と、を介して伝達されるエンジン6からの動力によって回転駆動する。サイドロータ52は、伝動軸54を介して伝達されるエンジン6からの動力によって回転駆動する。
施肥装置60は、圃場に肥料を供給するものである。施肥装置60は、操縦席11の機体後側に設けられている。施肥装置60は、貯留ホッパ61に貯留されている粒状の肥料を、植付作業中に設定量ずつ圃場に放出可能である。施肥装置60は、コントローラ150aと接続する施肥量調節モータ180(図5参照)を備え、肥料の散布量である施肥量を調整することができる。
また、フロアステップ8における操縦席11よりも機体前側には、操縦部70が設けられている。操縦部70は、ボンネット71と、モニタパネル72と、操舵ハンドル73と、主変速操作部材74と、植付操作部材75と、フロントカバー76と、を備えている。
ボンネット71は、フロアステップ8における操縦席11よりも機体前側かつ機体中央側に設けられている。ボンネット71は、フロアステップ8の床面から機体上側に突出している。ボンネット71は、例えば、充放電可能なバッテリー、主変速操作部材74や植付操作部材75等の伝動機構、走行車体2の旋回時に植付操作部材75を植付下げに切り替えるモータ、主変速操作部材74や植付操作部材75の角度を検知するポテンショメータ、などの内装機器を有している。ボンネット71の機体前側には、例えば、バッテリーの交換などをする際に、作業者が作業するための開口空間部(図示省略)が形成されている。
モニタパネル72は、ボンネット71の機体上側に設けられている。モニタパネル72は、操縦席11に着座する作業者と対面するように、後下がり傾斜面となっている。モニタパネル72の機体中央側には、ハンドルポスト73aが立設されている。モニタパネル72は、例えば、左右一対の線引きマーカ(図示省略)が圃場に出ていることを報知するマーカモニタ、植付操作部材75が「植える」位置にあることを報知する植付クラッチモニタ、貯留ホッパ61内の肥料が所定量を下回ったことを報知する肥料切れモニタ、貯留ホッパ61から圃場に肥料を導入する通路が詰まったことを報知する肥料詰りモニタ、等の各種モニタを有している。各種モニタは、モニタパネル72の表面において、作業者から目視可能に配置されている。
操舵ハンドル73は、作業者により操作されることで、走行車体2を操舵するものである。操舵ハンドル73は、ボンネット71の機体上側に設けられている。操舵ハンドル73は、機体左右方向において、ボンネット71の機体中央側に位置している。操舵ハンドル73は、ボンネット71内の図示しない操作装置等を介して前輪3を転舵させることが可能である。
主変速操作部材74は、主変速レバー(HSTレバーともいわれる)であり、走行車体2の前後進、及び移動速度を変更するためのレバーである。主変速操作部材74は、ボンネット71の機体上側に設けられている。本実施形態における主変速操作部材74は、ボンネット71の機体左右方向における予備苗枠(図示省略)側に設けられている。主変速操作部材74は、ボンネット71の機体左側に設けられている。主変速操作部材74は、ボンネット71の機体上側から上方に向けて突出している。主変速操作部材74の機体上端位置は、ボンネット71の機体上端位置と、操舵ハンドル73の機体上端位置と、の間の位置となっている。
植付操作部材75は、植付クラッチレバーであり、苗植付部30を昇降させたり、苗植付部30による苗の植え付けを開始・停止させたりするためのレバーである。植付操作部材75は、ボンネット71の機体上側に設けられている。本実施形態における植付操作部材75は、ボンネット71の機体左右方向におけるブレーキペダル18側に設けられている。植付操作部材75は、ボンネット71の機体上側から上方に向けて突出している。植付操作部材75の機体上端位置は、主変速操作部材74の機体上端位置と同様の位置となっている。
フロントカバー76は、ボンネット71の機体前側に設けられるカバー部材であり、ボンネット71の機体前側に形成された開口空間部(図示省略)を覆うカバー部材である。フロントカバー76は、機体後側から機体前側に向かうにしたがって、機体左右方向における幅、及び機体上下方向における幅のそれぞれが狭くなる。フロントカバー76は、機体上側、機体後側かつ機体外側に位置する支持部周りに回動可能に、ボンネット71に支持されている。
また、本実施形態に係る苗移植機1は、位置情報取得装置として、GPS(Global Positioning System)によって苗移植機1の位置情報を取得するGPS制御装置120(図5参照)を備える。走行車体2には、GPS制御装置120を構成する受信アンテナ121(図5参照)が配設される。この受信アンテナ121は、時間的に所定の間隔でGPS座標を取得することにより、地球上での位置情報を所定間隔で取得することができる。受信アンテナ121を有するGPS制御装置120は位置情報取得装置として設けられる。
図4に後述する情報記憶端末140に記憶された作業マップの一例を示す。図4に示す作業マップは、説明のため、前回の苗を植え付けたときの苗移植機1が通った経路と、圃場の状況のみを簡略化して示している。情報記憶端末140によって、GPS制御装置120が取得する位置座標情報、位置毎の施肥量に関する情報、圃場の状況に関する情報などを記憶し、さらに作業マップを作成しておくことで、同じ圃場で作業する場合の作業効率、苗の植え付け精度、及び肥料の散布精度の向上を図ることができる。圃場の状況に関する情報は、圃場の硬さなどに関する情報であり、例えば、作業を行う圃場が複数の圃場を合筆することで形成された圃場であるか、土層改良が行われた圃場であるかどうかに関する情報である。合筆された圃場は、圃場間の畔を切り崩して形成される切り土や、段差が異なる圃場において低い位置の圃場に土を入れることで形成される盛り土を含んでいる。そのため、合筆された圃場では、圃場の硬さが異なる箇所が存在する。切り土によって形成された箇所は、他の箇所よりも硬く、盛り土によって形成された箇所は、他の箇所よりも柔らかい。また、土層改良が行われた圃場は、圃場の硬さが柔らかい。このような圃場では、耕盤が安定せず、苗移植機1が安定しない。従って、圃場の状況に関する情報を記憶して作業マップを作成し、作業マップなどに基づいて苗の植え付けを行うことで、作業効率を向上させ、かつ苗の植え付け精度を向上させて作物の品質を圃場全体で安定化させることができる。圃場の状況に関する情報、位置座標情報、位置毎の施肥量、及び作業マップなどは、後述する情報記憶端末140に記憶される。
次に、苗移植機1の制御系について説明する。図5は、苗移植機1の制御装置150を中心としたブロック図、図6は、制御装置150を構成するコントローラ150a、及びこれに接続する情報記憶端末140を中心としたブロック図である。本実施形態に係る苗移植機1は、電子制御によって各部を制御することが可能になっており、苗移植機1は、各部を制御する制御装置150を備える。この制御装置150は、走行車体2に設けられるコントローラ150aと、着脱自在な情報記憶端末140とを備える。
いずれも、CPU(Central Processing Unit)等を有する処理部や、ROM(Read Only Memory)、RAM(Random Access Memory)等の記憶部、さらには入出力部が設けられ、これらは互いに接続されて互いに信号の受け渡しが可能である。記憶部には、苗移植機1を制御するコンピュータプログラムなどが格納される。
例えば、コントローラ150aは、深度センサ130や回動センサ170、あるいはGPS制御装置120により取得した情報に基づいて、苗植付部30や整地装置50を昇降させる自動昇降処理を行う。
情報記憶端末140は、情報を表示する表示部142と、各種の入力操作を行う操作部143と、情報を記憶する記憶部141とを有する。このうち、表示部142と操作部143とは、別体で構成されていてもよいが、本実施形態では、タッチパネル式のディスプレイによって一体で構成されたタブレット端末としている。情報記憶端末140は、他の作業車両、例えば、トラクターやコンバインなどにも着脱することができ、記憶された情報を作業車両間で共有することができる。
情報記憶端末140は、画像認識プログラム、作業マップ作成プログラムなどが記憶部141に記憶されており、GPS制御装置120で取得した位置情報、位置毎の施肥量に関する情報、及び圃場の状況に関する情報などを記憶し、これらの情報に基づいた作業マップを作成し、作業マップを記憶することができる。
さらに、作業者により登録された情報などに基づいて作業マップを作成し、作業マップを登録することができる。作業者により登録される情報は、例えば、圃場の状況に関する情報や、裏作で生育した作物に関する情報である。作物に関する情報には、施肥量に関する情報が含まれる。裏作で栽培した作物により、圃場の土の栄養分が異なるためである。例えば、裏作で豆類を栽培し、今回稲を栽培する場合には、施肥量が少なくなる。また、裏作で芋類を栽培し、今回稲を栽培する場合には、施肥量が多くなる。このように、作業マップに裏作で生育した作物に関する情報を登録し、作業マップに基づいて作業を行うことで、作物を安定して生育し、品質を安定化することができる。
従って、作業マップには、位置情報、過去に行った作業の経路など過去の作業に関する情報、位置毎の施肥量に関する情報、作業者によって登録された情報、圃場の状況に関する情報などが含まれる。そして、情報記憶端末140は、これらの情報を関連付けて記憶し、マップ化することで作業マップを作成する。情報記憶端末140は、コントローラ150aと協働しながら苗植付部30、整地装置50、施肥装置60の作動を制御することができる。なお、情報記憶端末140は、他の作業車両に接続された状態で記憶された情報や、作業マップに基づいて苗植付部30、整地装置50、施肥装置60の作動を制御することができる。
情報記憶端末140は、記憶した作業マップを表示部142に表示することができる。また、情報記憶端末140は、作業者が必要とする情報のみを選択的に表示部142に表示することができる。
また、図5、及び図6に示すように、制御装置150には、モータ等のアクチュエータ類やランプ、スピーカなどの報知装置840、各部の情報を取得するセンサ類や各種スイッチなどが接続される。例えば、コントローラ150aには、アクチュエータ類として、エンジン6の吸気量を調節するスロットル(図示省略)を作動させることにより、エンジン6の回転速度を増減させるスロットルモータ17や、走行車体2の車速を制御する車速制御機構880や、前述したように、深度センサ130を回動させる回動モータ69、圃場に肥料を繰り出す施肥量調節モータ180などが接続される。
さらに、図6に示すように、コントローラ150aには、油圧昇降シリンダ24を制御する油圧バルブ820のスプールを動作する切替モータ810や、苗植付部30を左右回動させ、苗植付部30の左右の傾きを修正可能なローリング機構850などが接続される。なお、ローリング機構850は、走行車体2の昇降リンク21と苗植付部30の植付フレームとの間に設けられており、走行車体2が前後方向に沿った軸心(図示省略)回りに左右回動しても、図5に示すローリングシリンダ860の駆動により苗植付部30を水平状態に維持することができる。
また、コントローラ150aに接続されるセンサ類としては、肥料濃度センサ110や深度センサ130の他、水温を検知する水温センサ200、走行車体2の傾斜を検知する傾斜センサ190、苗載置台31に設けられ、載置される苗の重量を検知する重量センサ160、苗植付部30の上下回動量を検知する回動センサ170、後輪回転センサ210、及び作業クラッチセンサ58が接続される。
肥料濃度センサ110は、左右の前輪3それぞれに設けられ、左右の前輪3間の肥料濃度を検知する。すなわち、肥料濃度センサ110は、環状の電極板で構成され、前輪3の機体内側または外側で、且つ土壌や水中に近い外周縁部付近に配置される。
深度センサ130は、取付軸などを介して走行車体2に回動自在となるように複数取り付けられている。深度センサ130は、超音波やレーザー光の反射により水面、または土壌表面までの深さを測定するものであり、測定されたその場の深さがコントローラ150aに送信される(図5参照)。なお、深度センサ130は、センタロータ51、及びサイドロータ52の後方に設けてもよい。また、深度センサ130をセンタロータ51の後方、及びサイドロータ52の前方となるように、左右方向に一列に設けてもよい。
深度センサ130は、圃場水面からの反射波を検知しているため、水面が高いほど反射時間は短くなり、コントローラ150aは深度が「深い」と判定する。しかし、水面と深度センサ130との距離は、波などの影響を受けて変動するため、その影響を可及的に排除するために、ここでは、0.01秒ごとに20個の検知値を取得し、その中で最大値とその次に大きな値、及び最小値とその次に小さな値の4つを捨て、残りの16の検知値の平均を用いて深度を検知している。
水温センサ200は、肥料濃度センサ110を構成する電極板に取り付けられ、水温を検知する。
傾斜センサ190は、走行車体2のピッチングすなわち上下方向への傾斜を検知する。コントローラ150aは、傾斜センサ190が検知する走行車体2の傾斜角度に合わせて深度センサ130が常時鉛直方向に向くように、回動モータ69を駆動して深度センサ130を取付軸まわりに回動させる。
後輪回転センサ210は、後輪4の回転速度を検知することにより、走行車体2の車速を検知する車速検知部材として設けられる。作業クラッチセンサ58は、苗植付部30に動力を伝達するクラッチ(図示省略)の接続状態を検知することにより、苗植付部30の作動を検知する作業検知部材として設けられる。
回動センサ170は、苗植付部30を構成する苗植付装置40に設けられ、センタフロート32aの上下動を検知するセンサである。回動センサ170は、センタフロート32aの前部の角度を、水平を基準として仰角側、及び伏角側に検知する。すなわち、回動センサ170は、圃場表土面の凹凸を検知するセンサであり、圃場の深度を検知するセンサである。
本実施形態に係る作業車両としての苗移植機1は、上述してきた構成を有する。以下、その動作について説明する。
苗移植機1の運転時は、エンジン6で発生する動力によって、走行車体2の走行と、苗載置台31に載せた苗の植付作業を行う。この植付作業は、回転軸が左右方向になる向きで、植込杆41も回転することにより、苗載置台31に載せられた苗を順次植込杆41で取り、取った苗を徐々に圃場に植え付ける。その際に、苗載置台31を、苗載置台31に載置する1条分の機体左右方向の幅の範囲内で機体左右方向に往復移動させることにより、各苗植付装置40は、苗載置台31においてそれぞれの苗植付装置40に対応する部分から苗を取り出し、圃場に植え付ける。
すなわち、各苗植付装置40は、苗載置台31の所定の条に対応する部分から苗を取り出して、所定の条に苗を植え付ける。植付作業時は、このように苗植付装置40を作動させながら圃場内を走行車体2で走行することにより、複数の列状に苗を植え付ける。
また、走行車体2の走行時には、エンジン6で発生した動力はベルト式動力伝達機構12に伝達され、ベルト式動力伝達機構12から油圧式無段変速機13に伝達されて、油圧式無段変速機13で所望の回転速度や回転方向、トルクに変換されて出力される。油圧式無段変速機13から出力された動力は、ミッションケース14に伝達され、路上走行時の走行速度に適した回転速度、または苗の植え付け時の走行速度に適した回転速度にミッションケース14内で変速されて、前輪3側や後輪4側に出力される。また、ミッションケース14から出力される動力の一部は、苗植付部30側にも伝達され、苗植付部30での植え付け作業にも用いられる。
なお、本実施形態に係る苗移植機1は、圃場で植え付け作業を行う際には、位置情報取得装置であるGPS制御装置120で苗移植機1の位置情報を、所定の時間間隔ごとに取得する。
情報記憶端末140には、通常の植付領域や、圃場の状況などに関する圃場内の所定位置を示す情報が記憶されており、コントローラ150aは、情報記憶端末140に記憶されている情報と、受信アンテナ121で取得した位置情報とを比較し、施肥装置60の施肥量調節モータ180、苗植付部昇降機構20の油圧昇降シリンダ24などを制御する。
苗移植機1では、回動センサ170からの信号に基づき、苗植付部昇降機構20の油圧昇降シリンダ24を伸縮させ、苗植付部30を昇降させることで、苗の植え付け深さが所定の深さに調整される。具体的には、回動センサ170によって検知したセンタフロート32aの前部の角度が、水平を基準として仰角側に判定値以上大きくなった場合に、コントローラ150aは、苗の植え付け深さが深くなり過ぎないように苗植付部30を上昇させる。また、センタフロート32aの前部の角度が、水平を基準として伏角側に判定値以上大きくなった場合に、コントローラ150aは、苗の植え付け深さが浅くなり過ぎないように苗植付部30を降下させる。判定値は、圃場の状況に関する情報に基づいて複数設定されており、ここでは、第1判定値、及び第2判定値が予め設定されている。第1判定値は、植え付けを行う圃場が盛り土、及び切り土ではない場合に用いられる値であり、第2判定値は、植え付けを行う圃場が盛り土、または切り土である場合に用いられる値である。第2判定値は、第1判定値よりも大きい。
ここで、図7を参照しながら、本実施形態に係る苗移植機1における植え付け時の処理について説明する。図7は、植え付け処理の一例を示すフローチャートである。
ステップS100では、コントローラ150aは、GPS制御装置120によって取得した現在の位置情報と、情報記憶端末140に記憶された作業マップとに基づいて、植え付けを行う圃場が盛り土、または切り土で形成されているかどうか判定する。植え付けを行う圃場が盛り土、または切り土で形成されている場合には、コントローラ150aは、処理をステップS101に移す。一方、植え付けを行う圃場が盛り土、または切り土で形成されていない場合には、コントローラ150aは、処理をステップS105に移す。
ステップS101では、コントローラ150aは、油圧昇降シリンダ24を伸縮動作させて苗植付部30の昇降を開始するための判定値を第2判定値に設定する。第2判定値は、圃場が盛り土、及び切り土ではない場合の判定値である第1判定値よりも大きい値である。すなわち、コントローラ150aは、圃場が盛り土、または切り土である場合には、苗植付部30を昇降させる判定値を、圃場が盛り土、または切り土ではない場合よりも大きくし、苗植付部30の昇降を開始する角度を大きくし、圃場表土面の凹凸に対する苗植付部30の昇降応答を鈍くする。これにより、圃場が盛り土、または切り土であり、苗移植機1が安定しない場合には、圃場が盛り土、または切り土ではなく、苗移植機1が安定する場合よりも、圃場表土面の凹凸に対する苗植付部30の昇降が抑制される。すなわち、圃場が盛り土、または切り土である場合には、圃場が盛り土、または切り土ではない場合よりも油圧昇降シリンダ24の伸縮動作の感度が鈍くなる。
苗移植機1が安定しない圃場において圃場表土面の凹凸に敏感に応答して苗植付部30を昇降させた場合には、凹凸の変化に対して苗植付部30の動作に遅れが生じる可能性があり、植え付け精度が低下し、苗を適切に植え付けることができず、欠株が生じるおそれがある。
これに対し、本実施形態では、苗移植機1が安定しない圃場に苗を植え付ける場合には、圃場表土面の凹凸に対する苗植付部30の昇降応答を鈍くすることで、苗を確実に植え付けることができ、植え付け精度を向上させることができ、作物の品質を圃場全体で安定化させることができる。
ステップS102では、コントローラ150aは、回動センサ170からの信号に基づいてセンタフロート32aの前部の角度を検知し、検知した角度と第2判定値とを比較する。なお、コントローラ150aは、仰角側、及び伏角側において、検知した角度と第2判定値とを比較する。コントローラ150aは、検知した角度が第2判定値以上である場合には、処理をステップS103に移す。すなわち、コントローラ150aは、検知した角度が仰角側に第2判定値以上となっている場合、または伏角側に第2判定値以上となっている場合には、処理をステップS103に移す。一方、コントローラ150aは、検知した角度が第2判定値よりも小さい場合には、処理をステップS104に移す。
ステップS103では、コントローラ150aは、油圧昇降シリンダ24を伸縮動作させることで苗植付部30の高さを調整する。具体的には、コントローラ150aは、圃場が盛り土である場合には、苗の植え付け深さが浅くなるように苗植付部30を上昇させる。つまり、圃場が盛り土である場合には、苗は、圃場が盛り土ではない場合よりも苗の植え付け深さが浅くなる浅植えによって植え付けられる。また、圃場が切り土である場合には、苗移植機1が、左右の駆動輪(前輪3、及び後輪4)の一方が切り土を通り、もう一方が切り土ではない土を通ることがある。このような場合には、苗植付部30が左右方向に傾き、切り土で形成された箇所に苗が植え付けられないおそれがある。そのため、このような場合には、コントローラ150aは、苗植付部30を降下させて、切り土で形成された箇所にも苗を植え付ける。なお、苗植付部30の高さ調整はこれに限られず、圃場の状況に応じて苗を適切に植え付けることができるように調整される。
ステップS104では、コントローラ150aは、車速制御機構880によって走行車体2の速度を規制する。具体的には、コントローラ150aは、走行車体2の速度の上限を所定速度に設定し、車速制御機構880によって走行車体2の車速を規制する。所定速度は、予め設定された速度であり、圃場が盛り土、または切り土であり、苗移植機1が安定しない状態で植え付けを行う場合に作業者の安全を考慮して設定された速度である。
ステップS105では、コントローラ150aは、油圧昇降シリンダ24を伸縮動作させて苗植付部30の昇降を開始するための判定値を第1判定値に設定する。
ステップS106では、回動センサ170からの信号に基づいてセンタフロート32aの前部の角度を検知し、検知した角度と第1判定値とを比較する。コントローラ150aは、ステップS102と同様に仰角側、及び伏角側において、検知した角度と第1判定値とを比較する。コントローラ150aは、検知した角度が第1判定値以上である場合には、処理をステップS107に移し、検知した角度が第1判定値よりも小さい場合には、今回の処理を終了する。
ステップS107では、コントローラ150aは、油圧昇降シリンダ24を伸縮動作させることで苗植付部30の高さを調整する。
次に、図8を参照しながら、本実施形態に係る苗移植機1において、施肥量を調整して植え付けを行う場合の植え付け開始処理について説明する。図8は、この処理の一例を示すフローチャートである。
施肥量を調整して植え付けを行う場合には、植え付けを開始した直後の所定往復(例えば、2往復)間に、位置毎の施肥量を決定するための施肥量の標準値を算出するティーチングが行われる。以下で説明する処理は、ティーチングを行う場合に実行される。なお、ティーチングは、情報記憶端末140の操作により開始され、操舵ハンドル73の操作回数や、走行距離などに基づいて終了する。
ステップS200では、コントローラ150aは、GPS制御装置120によって取得した現在の位置情報と、情報記憶端末140に記憶された作業マップとに基づき、植え付けを開始する圃場が盛り土であるかどうか判定する。すなわち、コントローラ150aは、ティーチングが盛り土で行われるかどうか判定する。コントローラ150aは、植え付けを開始する圃場が盛り土である場合には、処理をステップS201に移す。一方、コントローラ150aは、植え付けを開始する圃場が盛り土ではない場合には今回の処理を終了する。
ステップS201では、コントローラ150aは、報知装置840を作動させるとともに、施肥装置60を停止する。ティーチングでは、肥料濃度センサ110によって検知した肥料の濃度に基づいて標準値が算出される。このようなティーチングを盛り土で行うと、標準値の誤差が大きくなることが知られており、ティーチングは、盛り土以外で行う方がよい。従って、植え付けを開始する圃場が盛り土である場合には、コントローラ150aは、報知装置840によって作業者にティーチングが盛り土で行われることを知らせる。具体的には、コントローラ150aは、警告灯を点灯させるなどにより、作業者にティーチングが盛り土で行われることを報知する。
次に図9を参照しながら、本実施形態に係る苗移植機1において、整地装置50を駆動させる場合の処理について説明する。図9は、この処理の一例を示すフローチャートである。
ステップS300では、コントローラ150aは、整地装置駆動条件を満たすかどうか判定する。整地装置駆動条件は、以下の(a)、(b)である。
(a)苗の植え付けを行う圃場の深さの差が第1所定差(第2所定値)以上である。
(b)苗移植機1が旋回位置である。
コントローラ150aは、(a)、(b)のいずれかを満たす場合に、整地装置駆動条件を満たすと判定し、(a)、(b)のいずれも満たさない場合に、整地装置駆動条件を満たさないと判定する。コントローラ150aは、(a)の判定においては、複数の深度センサ130によって検知した圃場の深さから苗の植え付けを行う圃場の深さの差を算出し、算出した差と第1所定差とを比較する。第1所定差は、予め設定された差であり、整地装置50により圃場を整地する必要がある深さである。コントローラ150aは、(b)の判定においては、GPS制御装置120によって取得した現在の位置情報と、情報記憶端末140に記憶された作業マップに含まれる走行経路とに基づいて苗移植機1が旋回位置に来たかどうか判定する。コントローラ150aは、整地装置駆動条件を満たす場合には、処理をステップS301に進める。一方、コントローラ150aは、整地装置駆動条件を満たさない場合には、今回の処理を終了する。
ステップS301では、コントローラ150aは、電動モータ870により、整地装置50を降下させるとともに、伝動機構53を介してセンタロータ51、及びサイドロータ52を駆動する。コントローラ150aは、深度センサ130によって検知した圃場の深さに応じて電動モータ870を制御し、整地装置50の高さを調整する。具体的には、コントローラ150aは、深度センサ130によって検知した圃場表土面の凹凸が多いほど整地装置50を降下させる。
ステップS302では、コントローラ150aは、施肥装置60によって肥料を散布中であるかどうか判定する。施肥装置60によって肥料を散布中である場合には、コントローラ150aは、処理をステップS303に進める。一方、施肥装置60によって肥料を散布していない場合には、コントローラ150aは、今回の処理を終了する。
ステップS303では、コントローラ150aは、センタロータ51の回転速度、及びサイドロータ52の回転速度を低下させる。具体的には、コントローラ150aは、センタロータ51の回転速度、及びサイドロータ52の回転速度を所定回転速度まで低下させる。所定回転速度は予め設定された回転速度であり、肥料が弾かれて苗移植機1に付着することを抑制するように設定された回転速度である。
ステップS304では、コントローラ150aは、施肥装置60における施肥量を増加させる。具体的には、コントローラ150aは、センタロータ51、及びサイドロータ52を駆動しない場合よりも施肥量を所定量増加させる。所定量は予め設定された量であり、センタロータ51、及びサイドロータ52によって肥料が弾かれた場合でも、規定の施肥量を散布可能となる量である。所定回転速度と所定量とは、関連付けて設定される。
なお、この処理において、圃場の水温を検知する水温センサ200によって水温を検知し、水温が所定水温よりも低い場合には、施肥量を少なくしてもよい。圃場の水温は水温センサ200からの信号だけでなく、肥料濃度センサ110からの信号や、深度センサ130からの信号に基づいて検知してもよい。水温が高くなると、肥料濃度センサ110によって検知される濃度が高くなる。また、圃場の深さが深く、また水位が高くなると水温が低くなる。このような点を考慮して、水温を検知してもよい。
また、水温に基づいて施肥量を少なくする際に、所定時間内における水温の差が所定水温以上大きくなった場合には、施肥量の減少量を小さくする。具体的には、施肥量を予め設定された下限値とする。所定時間、及び所定水温は、予め設定された値である。例えば、圃場全体に水が行き届いていない状態で、苗の植え付けを開始することがある。このような場合、水が行き届いている箇所から水が行き届いていない箇所に苗移植機1が移動し、肥料を散布しつつ苗の植え付けを行うことがある。このような場合には、検知される水温が急に高くなり、水温に基づいて施肥量を調整すると、散布される肥料が少なくなり、苗の生育が悪くなるおそれがある。なお、水位が高い箇所から水位が低い箇所に苗移植機1が移動した場合も同様のことが起こりうる。そのため、所定時間内に水温の差が所定水温以上大きくなった場合は、コントローラ150aは、水が行き届いていない箇所や、水位が低い箇所に苗を植え付けると判定し、施肥量を下限値とする。
情報記憶端末140は、深度センサ130によって検知した圃場の深さと、回動センサ170によって検知した圃場の深さとの差が予め設定された第2所定差(第1所定値)以上である場合、差が第2所定差以上となる箇所を位置情報に関連付けて記憶する。これにより、例えば、次年度の代掻き時に圃場の深さが大きく変化する位置を作業者が容易に認識することができる。そのため、次回以降の作業性を向上させ、圃場の深さをより均等にすることができる。
苗移植機1は、圃場の状況に関する情報を情報記憶端末140に記憶することで、圃場の状況、例えば、圃場の硬さなどを把握した状態で、苗移植機1によって作業を行うことができる。そのため、例えば、切り土や盛り土を含み、走行車体2が不安定となる圃場で作業を行う場合でも、記憶された圃場の状況に基づいて、即座に対応して作業を行うことができ、作業効率を向上させることができる。また、情報記憶端末140に記憶された圃場の状況に関する情報に基づいて苗植付部30の昇降が制御されるので走行車体2が不安定であっても、圃場の状況に応じて植え付けを行うことができ、植え付け精度を向上させることができ、作物の品質を圃場全体で安定化させることができる。
位置情報、過去の作業に関する情報、及び圃場の状況に関する情報をマップ化して情報記憶端末140に記憶することで、作業者が各情報を容易に視認することができ、安全に作業を行うことができ、また作業効率を向上させることができる。
情報記憶端末140に圃場の状況に関する情報を作業者が登録することができるため、圃場の状況に関する情報を正確に入力することができる。そのため、例えば、初めての圃場で作業を行う場合や、合筆した圃場で作業を行う場合であっても、圃場の状況に応じて植え付けを行うことができ、作業効率を向上させることができる。また、盛り土に苗を植え付ける場合には、苗の植え付け深さを浅くすることで、苗が沈まず、苗の生育を向上させることができ、作物の品質を圃場全体で安定化させることができる。
位置情報と、少なくとも情報記憶端末140に記憶された圃場の状況に関する情報、情報記憶端末140に登録された圃場の状況に関する情報の一方とに基づき、盛り土、または切り土に苗を植え付ける場合には、圃場の深さ変化に対する苗植付部30の昇降応答を鈍くする。これにより、圃場表土面の凹凸の変化に対して苗植付部30の動作遅れに起因して植え付け精度が低下することを抑制し、苗を適切に植え付けることができ、作物の品質を圃場全体で安定化させることができる。
盛り土、または切り土を走行する場合には、走行車体2の速度を規制することで、作業者の安全性を向上させることができ、また植え付け精度を向上させることができる。
盛り土で植え付けを開始した場合には、施肥装置60を停止し、作業者にその旨を報知することで、ティーチングによって算出し、位置毎の施肥量を決定するための標準値の誤差が大きくなることを防止することができる。
深度センサ130によって検知した圃場の深さの差が第1所定差以上である場合には、コントローラ150aが整地装置50を駆動し、整地することで、作業中における作業者の操作を少なくし、安全性を向上させることができる。また、電動モータ870によって整地装置50の高さを調整することで、圃場の整地性を向上させることができ、苗の生育を向上させることができ、作物の品質を圃場全体で安定化させることができる。
深度センサ130によって検知した圃場の深さと、回動センサ170によって検知した圃場の深さとの差が第2所定差以上である場合には、その箇所を位置情報に関連付けて情報記憶端末140に記憶する。これにより、圃場の深さをより均等にすることができる。
施肥装置60による肥料の散布中に、センタロータ51、及びサイドロータ52を駆動する場合には、施肥量を増加する。これにより、センタロータ51、またはサイドロータ52によって肥料が弾かれた場合であっても、規定の施肥量を散布することができる。
施肥装置60による肥料の散布中に、センタロータ51、及びサイドロータ52を駆動する場合には、センタロータ51、及びサイドロータ52の回転速度を低下させる。これにより、弾かれた肥料が苗移植機1に付着することを抑制することができ、肥料の付着により苗移植機1が腐食することを抑制することができ、また苗移植機1の清掃を容易に行うことができる。
走行経路を情報記憶端末140に記憶し、位置情報、及び走行経路に関する情報に基づき、苗移植機1が旋回位置に来るとコントローラ150aはセンタロータ51、及びサイドロータ52によって整地を行う。これにより、作業中における作業者の操作を少なくし、安全性を向上させることができる。また、旋回による苗移植機1の駆動輪(前輪3、及び後輪4)の跡を整地することができる。
圃場の水温が所定時間内に所定温度以上上昇した場合には、施肥量の減少量を小さくする。これにより、例えば、圃場の全体に水が行き届いていない状態で、苗の植え付けを行う場合であっても、水が行き届いていない箇所において施肥量が減少し過ぎることを防止することができる。そのため、苗の生育を向上させ、品質を安定させることができる。
深度センサ130によって検知した圃場の深さと、回動センサ170によって検知した圃場の深さとの差が第2所定差以上である場合には、その位置を位置情報と関連付けて情報記憶端末140に記憶させる。これにより、次回の作業、例えば、次年度の代掻き時に圃場の深さが大きく変化する位置を作業者が容易に認識することができる。そのため、次回以降の作業性を向上させることができる。
なお、コントローラ150aは、複数のコントローラによって構成されてもよい。
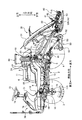
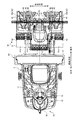
次に、本実施形態の変形例について図10,11を用いて説明する。図10は、変形例の苗移植機1の側面図である。図11は、変形例の苗移植機1の正面図である。
変形例の苗移植機1の走行車体2には、前部左右両側に、補給用の苗を載せておく、左右一対の予備苗枠700が設けられている。左右の予備苗枠700のうち、前方から見た場合に左側に位置する予備苗枠700の下部には、予備苗枠700から独立して回動する資材搬送装置710が設けられる。資材搬送装置710は、肥料袋等の作業資材を機外から積み込み、走行車体2側に移動させる。なお、右側に位置する予備苗枠700の下部に資材搬送装置710を設けてもよく、また、左右の予備苗枠700の下部に資材搬送装置710を設けてもよい。
このような苗移植機1においては、深度センサ130は、左右の予備苗枠700をそれぞれ支持する左右の苗枠フレーム720に設けられた取付アーム730の前端部に回動自在となるように複数取り付けられている。
深度センサ130は、圃場面を向く下部側に水や泥土が付着すると、正確な深度の検出ができなくなり、誤った深度をコントローラ150aに送信するおそれがあるので、左右の前輪3が跳ね上げる水や泥土がほぼ届かない高さに配置される。また、深度センサ130は、機体前後方向視において、前輪3の真上に位置しないように配置される。これにより、深度センサ130に水や泥土が付着することを抑制し、圃場の深さを正確に検出することができる。
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細、及び代表的な実施形態に限定されるものではない。従って、添付の特許請求の範囲、及びその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。