JP6598488B2 - 振動波モータ - Google Patents
振動波モータ Download PDFInfo
- Publication number
- JP6598488B2 JP6598488B2 JP2015080688A JP2015080688A JP6598488B2 JP 6598488 B2 JP6598488 B2 JP 6598488B2 JP 2015080688 A JP2015080688 A JP 2015080688A JP 2015080688 A JP2015080688 A JP 2015080688A JP 6598488 B2 JP6598488 B2 JP 6598488B2
- Authority
- JP
- Japan
- Prior art keywords
- friction member
- wave motor
- vibration wave
- vibrator
- friction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/06—Drive circuits; Control arrangements or methods
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0065—Friction interface
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
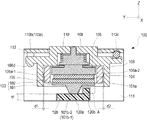
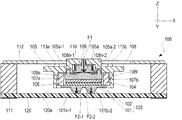
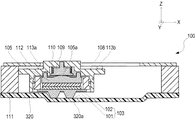
本発明を示す図面において、XYZ座標系が図示のように定義されている。図1は図4の断面線I−Iにおける実施例1の振動波モータ100(超音波モータ)の断面図である。図2は図4の断面線II−IIにおける実施例1の振動波モータ100の断面図である。図面を用いて振動波モータ100の構造を説明する。
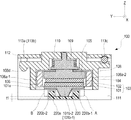
実施例2は、実施例1の摩擦部材120を更に薄型化した実施例である。本実施例2では、摩擦部材220に2つの補強部220b−1、220b−2が設けられている。補強部220b−1、220b−2は、振動板101の平板部101aと摩擦接触面220aとの間の領域A及び領域Bに設けられる。すなわち、突起部101b−1、101b−2の両側に補強部220b−1、220b−2が設けられている。なお、領域A、領域Bは、いずれも実施例1と同様の空間部(デッドスペース)である。また、摩擦部材220の各寸法は、実施例1と同様に摩擦部材220の曲げ強度と振動共振点との関係を考慮して決められる。
図2において、振動子103が左端の駆動端まで駆動された場合、摩擦接触面120aと平板部101aとの間には空間部(デッドスペース)が生じる。同様に右端まで駆動された場合にもデッドスペースが生じる。これらの駆動端におけるデッドスペースを利用して摩擦部材120を変形し、薄型化(小型化)した例を図7に示す。320は変形された摩擦部材である。左端、右端の両駆動端部付近に摩擦部材320の一部が設けられることにより変形された摩擦部材320は、薄型化されている。このような摩擦部材320によって、振動波モータ100を更に薄型化することができる。
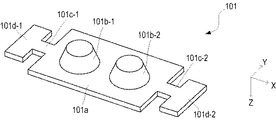
振動板 101
平板部 101a
突起部 101b−1、101b−2
圧電素子 102
振動子 103
加圧部材 109(加圧手段)
バネ部材 110(加圧手段)
摩擦部材 120、220、320
摩擦接触面 120a、220a、320a
補強部 120b、220b−1、220b−2
領域 A、B
Claims (11)
- 圧電素子と振動板とからなる振動子と、
前記振動子と接触する摩擦接触面を有する摩擦部材と、
を備えた、前記振動子に発生する振動を用いて前記振動子と前記摩擦部材とを相対移動させる振動波モータにおいて、
前記振動板は、前記圧電素子が固定される平板部と前記摩擦部材に接触する突起部からなり、前記摩擦部材は、前記平板部と前記摩擦接触面により規定される平面との間の領域に、前記相対移動の方向に沿って前記摩擦部材の強度を補う補強部を一つ備えた振動波モータ。 - 圧電素子と振動板とからなる振動子と、
前記振動子と接触する摩擦接触面を有する摩擦部材と、
を備えた、前記振動子に発生する振動を用いて前記振動子と前記摩擦部材とを相対移動させる振動波モータにおいて、
前記振動板は、前記圧電素子が固定される平板部と前記摩擦部材に接触する突起部からなり、前記摩擦部材は、前記平板部と前記摩擦接触面により規定される平面との間の領域に、前記相対移動の方向に沿って前記摩擦部材の強度を補う補強部を少なくとも一つ備え、
前記補強部は、前記振動子と接触しないことを特徴とする振動波モータ。 - 前記補強部は、前記突起部の両側に設けられることを特徴とする請求項2に記載の振動波モータ。
- 前記補強部は、前記摩擦部材の長手方向の強度を少なくとも補強することを特徴とする請求項1乃至3のいずれか1項に記載の振動波モータ。
- 前記摩擦部材の各寸法は、前記振動波モータの駆動周波数域に前記摩擦部材の振動共振点が存在しないように決められていることを特徴とする請求項1乃至4のいずれか1項に記載の振動波モータ。
- 前記摩擦接触面には、DLCコートが形成されていることを特徴とする請求項1乃至5のいずれか1項に記載の振動波モータ。
- 前記摩擦部材は、樹脂材料で形成されていることを特徴とする請求項1乃至6のいずれか1項に記載の振動波モータ。
- 前記振動子が前記相対移動した駆動端部において、前記平板部と前記摩擦接触面との間の領域に前記摩擦部材の一部が設けられることを特徴とする請求項1乃至7のいずれか1項に記載の振動波モータ。
- 前記突起部は、複数あることを特徴とする請求項1乃至8のいずれか1項に記載の振動波モータ。
- 前記振動波モータは、前記振動が超音波振動する超音波モータであることを特徴とする請求項1乃至9のいずれか1項に記載の振動波モータ。
- 前記振動波モータは、前記振動子を前記摩擦部材に加圧する加圧手段を有することを特徴とする請求項1乃至10のいずれか1項に記載の振動波モータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015080688A JP6598488B2 (ja) | 2015-04-10 | 2015-04-10 | 振動波モータ |
| CN201610212944.4A CN106059384B (zh) | 2015-04-10 | 2016-04-07 | 振动波马达 |
| US15/094,500 US10291155B2 (en) | 2015-04-10 | 2016-04-08 | Vibration wave motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015080688A JP6598488B2 (ja) | 2015-04-10 | 2015-04-10 | 振動波モータ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016201906A JP2016201906A (ja) | 2016-12-01 |
| JP2016201906A5 JP2016201906A5 (ja) | 2018-05-24 |
| JP6598488B2 true JP6598488B2 (ja) | 2019-10-30 |
Family
ID=57111413
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015080688A Active JP6598488B2 (ja) | 2015-04-10 | 2015-04-10 | 振動波モータ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10291155B2 (ja) |
| JP (1) | JP6598488B2 (ja) |
| CN (1) | CN106059384B (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6849381B2 (ja) * | 2016-10-17 | 2021-03-24 | キヤノン株式会社 | 振動型モータ、電子機器及び撮像装置 |
| US11201570B2 (en) * | 2017-03-28 | 2021-12-14 | Canon Kabushiki Kaisha | Vibration wave motor and optical device |
| JP2019195233A (ja) * | 2018-05-01 | 2019-11-07 | キヤノン株式会社 | 振動波モータ及び振動波モータを用いた駆動装置 |
| JP7406888B2 (ja) * | 2019-08-19 | 2023-12-28 | キヤノン株式会社 | 振動型モータ及び駆動装置 |
| WO2022004792A1 (ja) * | 2020-06-30 | 2022-01-06 | ミツミ電機株式会社 | 駆動ユニット、光学素子駆動装置、カメラモジュール、及びカメラ搭載装置 |
| JP7295447B2 (ja) * | 2020-09-29 | 2023-06-21 | ミツミ電機株式会社 | 駆動ユニット、光学素子駆動装置、カメラモジュール、及びカメラ搭載装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4495432A (en) * | 1982-12-15 | 1985-01-22 | Canon Kabushiki Kaisha | Piezoelectric vibration wave motor with sloped drive surface |
| JP3045564B2 (ja) * | 1991-06-12 | 2000-05-29 | アルプス電気株式会社 | 超音波モータ |
| US6154590A (en) * | 1998-09-28 | 2000-11-28 | Lucent Technologies Inc. | Wavelength-tunable devices and systems comprising flexed optical gratings |
| JP3566711B2 (ja) * | 2002-07-12 | 2004-09-15 | キヤノン株式会社 | 振動波駆動装置 |
| JP2004266943A (ja) * | 2003-02-28 | 2004-09-24 | Seiko Epson Corp | 超音波モータ、稼働装置、光学系切換機構および電気機器 |
| JP2004320979A (ja) * | 2003-04-03 | 2004-11-11 | Seiko Epson Corp | 稼働装置および電気機器 |
| JP4652677B2 (ja) * | 2003-09-18 | 2011-03-16 | オリンパス株式会社 | 超音波振動子及びそれを用いた超音波モータ |
| JP4521237B2 (ja) * | 2004-09-06 | 2010-08-11 | オリンパス株式会社 | レンズ鏡筒 |
| JP4830858B2 (ja) * | 2004-12-28 | 2011-12-07 | 日本電気株式会社 | 圧電セラミックアクチュエータ及び携帯機器 |
| JP4769037B2 (ja) * | 2005-07-19 | 2011-09-07 | パナソニック電工株式会社 | 弾性表面波アクチュエータ |
| US8297149B2 (en) * | 2007-02-28 | 2012-10-30 | Konica Minolta Opto, Inc. | Friction drive actuator |
| JP2009148068A (ja) * | 2007-12-13 | 2009-07-02 | Olympus Corp | 超音波モータ |
| CN102969936B (zh) * | 2012-11-30 | 2015-03-18 | 中国科学院宁波材料技术与工程研究所 | 一种单驱双向型盘形直线压电电机 |
| JP6188366B2 (ja) | 2013-03-21 | 2017-08-30 | キヤノン株式会社 | アクチュエータ及び光学機器 |
| JP5955347B2 (ja) * | 2013-04-01 | 2016-07-20 | キヤノン株式会社 | リニア超音波モータ及びそれを用いた光学装置 |
| JP6257224B2 (ja) * | 2013-08-29 | 2018-01-10 | キヤノン株式会社 | モータ及びレンズ装置 |
-
2015
- 2015-04-10 JP JP2015080688A patent/JP6598488B2/ja active Active
-
2016
- 2016-04-07 CN CN201610212944.4A patent/CN106059384B/zh active Active
- 2016-04-08 US US15/094,500 patent/US10291155B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN106059384A (zh) | 2016-10-26 |
| US20160301329A1 (en) | 2016-10-13 |
| JP2016201906A (ja) | 2016-12-01 |
| CN106059384B (zh) | 2019-01-01 |
| US10291155B2 (en) | 2019-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6598488B2 (ja) | 振動波モータ | |
| US7602104B2 (en) | Ultrasonic motor and pressing mechanism of ultrasonic vibrator | |
| WO2012008114A2 (en) | Vibration type driving device | |
| US9964731B2 (en) | Vibration type motor, and lens drive apparatus, lens unit and image pickup apparatus using vibration type motor | |
| JP5810303B2 (ja) | 駆動装置 | |
| JP6141106B2 (ja) | 振動型アクチュエータおよび光学機器 | |
| JP6324208B2 (ja) | 超音波モータ | |
| JP2017011977A (ja) | 振動波モータを用いたリニア駆動装置及び光学装置 | |
| JP2008289347A (ja) | 駆動装置 | |
| JP2012055152A (ja) | 駆動装置 | |
| JP6257224B2 (ja) | モータ及びレンズ装置 | |
| KR101601871B1 (ko) | 변위 부재, 구동 부재, 액츄에이터 및 구동 장치 | |
| JP2018174618A (ja) | 振動波モータを用いたリニア駆動装置及び光学装置 | |
| US10924037B2 (en) | Vibration motor that prevents resonance of contact member, and electronic apparatus | |
| JP2009050142A (ja) | 駆動装置 | |
| JP2019195233A (ja) | 振動波モータ及び振動波モータを用いた駆動装置 | |
| US7633209B2 (en) | Driving device capable of obtaining a stable frequency characteristic | |
| JP2017195713A (ja) | 振動波モータ及び振動波モータが搭載された光学機器 | |
| JP2008072785A (ja) | 振動型リニア駆動装置及びカメラレンズ | |
| JP2002058260A (ja) | 圧電アクチュエータ | |
| US11736038B2 (en) | Vibration actuator reduced in size and suppressed in generating abnormal noise and optical device | |
| JP2016152645A (ja) | 振動波モータ | |
| JP7134817B2 (ja) | 振動波モータ及びレンズ駆動装置 | |
| JP2009276423A (ja) | 駆動装置 | |
| WO2024014133A1 (ja) | 振動型モータ、駆動装置、レンズ装置、撮像装置、および摩擦部材の製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20171214 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180406 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180406 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191001 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6598488 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |