JP6557559B2 - 駆動装置 - Google Patents
駆動装置 Download PDFInfo
- Publication number
- JP6557559B2 JP6557559B2 JP2015174459A JP2015174459A JP6557559B2 JP 6557559 B2 JP6557559 B2 JP 6557559B2 JP 2015174459 A JP2015174459 A JP 2015174459A JP 2015174459 A JP2015174459 A JP 2015174459A JP 6557559 B2 JP6557559 B2 JP 6557559B2
- Authority
- JP
- Japan
- Prior art keywords
- vibrator
- vibration
- friction member
- vibrators
- interval
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Lens Barrels (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
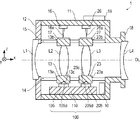
以下、図を用いて本発明の実施例について説明する。図1は、本発明の駆動装置140を搭載したレンズ装置1の断面図である。なお、全ての図において、同一部材は同一記号で図示される。本明細書中において、後述する第1レンズL1、第1フォーカスレンズL2、第2フォーカスレンズL3、第3レンズL4の光軸OLの方向をX方向と定義する。X方向において、入射側を−X方向、射出側を+X方向と定義する。入射側からレンズ装置1を見て左右方向をY方向と定義し、右が−Y方向、左が+Y方向とする。入射側からレンズ装置1を見て上下方向をZ方向と定義し、上が+Z方向、下が−Z方向とする。
L=nλ+aλ n:整数 a:0から1までの小数 ・・・(I)
このとき、二つの振動子109、振動子209に発生させる振動の位相差Δθは、以下の式(II)で表わされる。
Δθ=(1−2a)π ・・・(II)
図5(C)の状態においては、a=0、図7(C)の状態においては、a=0.5となる。
101 摩擦部材
101a 接触面
102、202 振動板
103、203 圧電素子
109、209 振動子
102a、202a 接触部
130、230 楕円振動
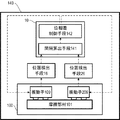
140 駆動装置
141 間隔算出手段
142 位相差制御手段
L 間隔
Δθ 楕円振動130と楕円振動230の位相差
λ 波長
n 整数
Claims (5)
- 少なくとも一つの接触部を備える振動板と圧電素子とを固着して構成される、複数の振動子と、
前記接触部と摩擦接触する接触面を有する摩擦部材と、を備え、
前記摩擦部材には、複数の前記振動子が加圧接触し、
複数の前記振動子は、前記圧電素子で励起される振動で前記接触部に楕円振動を発生し、
前記楕円振動によって複数の前記振動子と前記摩擦部材とは相対的に移動する駆動装置において、
複数の前記振動子の間隔に応じて、前記圧電素子で励起される複数の前記振動子のそれぞれの振動の位相を制御する制御手段を有することを特徴とする、駆動装置。 - 前記制御手段は、複数の前記振動子の間隔に応じて、複数の前記振動子のそれぞれの振動の位相の差である位相差を変更することを特徴とする、請求項1に記載の駆動装置。
- 複数の前記振動子は、それぞれ独立に移動し、
複数の前記振動子の位置をそれぞれ検出する複数の位置検出手段と、
該位置検出手段で検出された複数の前記振動子の位置に基づいて前記間隔を算出する間隔算出手段と、を有することを特徴とする、請求項2に記載の駆動装置。 - 前記制御手段は、前記間隔が前記摩擦部材の固有振動の波長の整数倍の場合は、前記位相差を180°とし、前記間隔が前記摩擦部材の固有振動の波長の(整数+0.5)倍の場合は、前記位相差を0°とし、前記間隔が整数倍と(整数+0.5)倍の間の場合は、前記位相差を内挿補間して求めた値とすることを特徴とする、請求項3に記載の駆動装置。
- 前記振動は、超音波領域の周波数の超音波振動であることを特徴とする、請求項1乃至4のいずれか1項に記載の駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015174459A JP6557559B2 (ja) | 2015-09-04 | 2015-09-04 | 駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015174459A JP6557559B2 (ja) | 2015-09-04 | 2015-09-04 | 駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017051041A JP2017051041A (ja) | 2017-03-09 |
| JP2017051041A5 JP2017051041A5 (ja) | 2018-10-11 |
| JP6557559B2 true JP6557559B2 (ja) | 2019-08-07 |
Family
ID=58278337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015174459A Expired - Fee Related JP6557559B2 (ja) | 2015-09-04 | 2015-09-04 | 駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6557559B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7397302B2 (ja) | 2019-12-26 | 2023-12-13 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
-
2015
- 2015-09-04 JP JP2015174459A patent/JP6557559B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017051041A (ja) | 2017-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5064864B2 (ja) | 光偏向装置、画像形成装置、及び光偏向装置の駆動方法 | |
| JP2007312465A (ja) | 駆動装置、光走査型装置及び物体情報検知装置 | |
| JP2007170938A (ja) | エンコーダ | |
| EP3382884B1 (en) | Vibration wave motor and optical device | |
| JP5065116B2 (ja) | 揺動体装置、光偏向装置、及びその制御方法 | |
| JP6557559B2 (ja) | 駆動装置 | |
| US20220065892A1 (en) | Laser Interferometer and Control Method for Laser Interferometer | |
| JP2009058616A (ja) | 揺動体装置、光偏向装置、及びそれを用いた画像形成装置 | |
| JP2570237B2 (ja) | 光スキャナ、振動装置、光学装置及び光ビ−ムプリンタ | |
| JP2019103371A (ja) | 振動波モータ及び振動波モータを用いたレンズ駆動装置 | |
| JP2008299297A (ja) | 揺動体装置、及び揺動体装置の振動系の駆動制御方法 | |
| JP4976885B2 (ja) | 鏡筒の旋回機構 | |
| JP6529279B2 (ja) | 振動型駆動装置、レンズ鏡筒及び撮像装置 | |
| JP6957322B2 (ja) | 振動型モータ、レンズ装置、および、電子機器 | |
| JP6188446B2 (ja) | 光学部材駆動装置及びそれを有するレンズ装置 | |
| JPH07270879A (ja) | アクチュエータを備えるカメラおよびカメラシステム | |
| JPH04368907A (ja) | 光スキャナ | |
| JP5339109B2 (ja) | ロータリーエンコーダ | |
| JP2019109351A (ja) | 光走査装置 | |
| JP2020072558A (ja) | 振動波モータ及び振動波モータを備えた駆動装置 | |
| JP2021016271A (ja) | 振動体を用いた駆動装置およびその制御方法 | |
| WO2016139917A1 (ja) | 走査装置 | |
| JP5296425B2 (ja) | 光走査装置及びそれを用いた印刷装置及びその制御方法、並びに光走査装置を備えたディスプレイ装置、画像読み取り装置、バーコードリーダ | |
| JP2017108496A (ja) | 振動波モータ及びそれを有するレンズ装置 | |
| JP2008112783A (ja) | 光照射システムおよび光照射方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20171214 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180831 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180831 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190411 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190410 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190605 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190613 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190712 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6557559 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |