JP7397302B2 - レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 - Google Patents
レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 Download PDFInfo
- Publication number
- JP7397302B2 JP7397302B2 JP2019236300A JP2019236300A JP7397302B2 JP 7397302 B2 JP7397302 B2 JP 7397302B2 JP 2019236300 A JP2019236300 A JP 2019236300A JP 2019236300 A JP2019236300 A JP 2019236300A JP 7397302 B2 JP7397302 B2 JP 7397302B2
- Authority
- JP
- Japan
- Prior art keywords
- optical axis
- frame
- section
- lens
- movable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 claims description 72
- 238000001514 detection method Methods 0.000 claims description 41
- 238000003384 imaging method Methods 0.000 claims description 20
- 239000002184 metal Substances 0.000 claims description 8
- 229910052751 metal Inorganic materials 0.000 claims description 8
- 238000000034 method Methods 0.000 claims description 5
- 239000000919 ceramic Substances 0.000 claims description 4
- 238000000465 moulding Methods 0.000 claims description 2
- 239000011347 resin Substances 0.000 claims description 2
- 229920005989 resin Polymers 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 16
- 230000006870 function Effects 0.000 description 8
- 230000006399 behavior Effects 0.000 description 5
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 4
- 238000005452 bending Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 238000003825 pressing Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 229910010293 ceramic material Inorganic materials 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/021—Mountings, adjusting means, or light-tight connections, for optical elements for lenses for more than one lens
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
- G02B7/102—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens controlled by a microcomputer
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
- G03B17/12—Bodies with means for supporting objectives, supplementary lenses, filters, masks, or turrets
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B3/00—Focusing arrangements of general interest for cameras, projectors or printers
- G03B3/10—Power-operated focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B30/00—Camera modules comprising integrated lens units and imaging units, specially adapted for being embedded in other devices, e.g. mobile phones or vehicles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/021—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors using intermittent driving, e.g. step motors, piezoleg motors
- H02N2/025—Inertial sliding motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/51—Housings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0046—Movement of one or more optical elements for zooming
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
- G03B2205/0061—Driving means for the movement of one or more optical element using piezoelectric actuators
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
- G03B2205/0084—Driving means for the movement of one or more optical element using other types of actuators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- General Engineering & Computer Science (AREA)
- Lens Barrels (AREA)
- Studio Devices (AREA)
- Camera Bodies And Camera Details Or Accessories (AREA)
- Adjustment Of Camera Lenses (AREA)
Description
光軸の方向に配置され、第1の可動レンズおよび第2の可動レンズをそれぞれ保持可能な第1の可動部および第2の可動部と、
前記光軸に対して互いに反対側に配置され、前記第1の可動部および前記第2の可動部を前記光軸の方向に駆動する第1の駆動部および第2の駆動部と、
を備え、
前記第1の駆動部および前記第2の駆動部のそれぞれは、第1の超音波モータおよび第2の超音波モータを有しており、
前記第1の駆動部は、いずれも前記光軸に対して前記第1の超音波モータが配置された側に配置された第1のフレームおよび第1の駆動軸を有し、
前記第2の駆動部は、いずれも前記光軸に対して前記第2の超音波モータが配置された側に配置された第2のフレームおよび第2の駆動軸を有し、
前記第1のフレームは、前記第1の可動部に接続され、前記第2のフレームは、前記第2の可動部に接続され、
前記第1の超音波モータおよび前記第2の超音波モータは、前記第1の可動部および前記第2の可動部のそれぞれを独立して前記光軸の方向に駆動する。
上記のレンズ駆動装置と、
前記第1の可動部および前記第2の可動部に保持される前記第1の可動レンズおよび前記第2の可動レンズを含むレンズ部と、
前記レンズ部により結像された被写体像を撮像する撮像部と、
を備え、
前記第1の可動レンズおよび前記第2の可動レンズを前記光軸の方向に駆動する。
情報機器または輸送機器であるカメラ搭載装置であって、
上記のカメラモジュールと、
前記カメラモジュールで得られた画像情報を処理する撮像制御部と、
を備える。
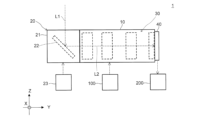
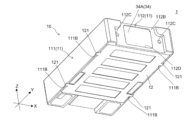
10 筐体
11 側壁部
12 底壁部
20 反射駆動部
21 反射筐体
22 ミラー
23 反射駆動制御部
30 レンズ部
31 第1レンズユニット
32 第2レンズユニット
32A 本体部
32B 被支持部
33 第3レンズユニット
33A 本体部
33B 被支持部
34 第4レンズユニット
34A 凸部
40 撮像部
50 ガイド軸
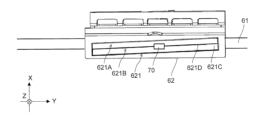
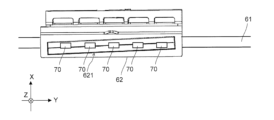
60 レンズ駆動部
61 駆動軸
62 フレーム
63 接続部
64 介在部
65 超音波モータ
70 位置検出部
100 駆動制御部
111 第1壁
111A 配置部
111B 被係合部
112 第2壁
112A ガイド支持部
112B 配置部
112C 駆動支持部
112D 開口部
113 第3壁
113A ガイド支持部
113B 駆動支持部
114 第4壁
121 位置決め部
122 折り曲げ部
123 ハーフパンチ
200 撮像制御部
621 マグネット部
621A マグネット
621B マグネット
621C 対向面
621D 境界
641 本体部
641A 板状部
641B 接続部
642 接触部
643 開口
651 共振部
651A 胴部
651B 振動子
651C 突出部
651D 通電部
652 圧電素子
653 第1電極
653A 挟持部
653B 電極部
654 第2電極
Claims (27)
- 光軸の方向に配置され、第1の可動レンズおよび第2の可動レンズをそれぞれ保持可能な第1の可動部および第2の可動部と、
前記光軸に対して互いに反対側に配置され、前記第1の可動部および前記第2の可動部を前記光軸の方向に駆動する第1の駆動部および第2の駆動部と、
を備え、
前記第1の駆動部および前記第2の駆動部のそれぞれは、第1の超音波モータおよび第2の超音波モータを有しており、
前記第1の駆動部は、いずれも前記光軸に対して前記第1の超音波モータが配置された側に配置された第1のフレームおよび第1の駆動軸を有し、
前記第2の駆動部は、いずれも前記光軸に対して前記第2の超音波モータが配置された側に配置された第2のフレームおよび第2の駆動軸を有し、
前記第1のフレームは、前記第1の可動部に接続され、前記第2のフレームは、前記第2の可動部に接続され、
前記第1の超音波モータおよび前記第2の超音波モータは、前記第1の可動部および前記第2の可動部のそれぞれを独立して前記光軸の方向に駆動する、
レンズ駆動装置。 - 前記光軸に対して前記第1の超音波モータおよび前記第2の超音波モータが配置された両側に配置され、前記第1の可動部および前記第2の可動部をいずれも前記両側で、前記光軸の方向に移動可能に支持するガイド部を備える、
請求項1に記載のレンズ駆動装置。 - 前記ガイド部は、前記両側で前記光軸の方向に延びる第1のガイド軸および第2のガイド軸を備え、
前記第1のガイド軸および前記第2のガイド軸は、前記光軸からの距離が互いに等しく、かつ、長さが互いに等しい、
請求項2に記載のレンズ駆動装置。 - 前記第1の駆動軸は、前記第1のフレームを前記光軸の方向に移動可能に支持し、
前記第2の駆動軸は、前記第2のフレームを前記光軸の方向に移動可能に支持する、
請求項1~3の何れか1項に記載のレンズ駆動装置。 - 前記第1の駆動軸および前記第2の駆動軸は、前記光軸からの距離が互いに等しく、かつ、長さが互いに等しい、
請求項1~4の何れか1項に記載のレンズ駆動装置。 - 前記第1の可動部、前記第2の可動部、前記第1の駆動部および前記第2の駆動部を少なくとも収容する筐体を備え、
前記筐体は、前記光軸の方向の両端側の壁部を有し、
前記第1の駆動軸および前記第2の駆動軸は、前記光軸の方向の両端側の壁部に支持されている、
請求項5に記載のレンズ駆動装置。 - 前記第1の超音波モータおよび前記第2の超音波モータのそれぞれは、共振する第1の振動子および第2の振動子で構成される共振部を有し、
前記第1の駆動部および前記第2の駆動部のそれぞれは、前記第1の超音波モータと前記第1のフレームとの間に、および、前記第2の超音波モータと前記第2のフレームとの間に、介在する介在部を有し、
前記介在部は、
前記共振部を挟むように配置され、前記第1の振動子および前記第2の振動子のそれぞれと接触する一対の接触部と、
前記一対の接触部間を接続する本体部と、
を有する、
請求項5または請求項6に記載のレンズ駆動装置。 - 前記介在部は、前記第1の振動子および前記第2の振動子と前記一対の接触部との接触に基づいて前記一対の接触部の外側から内側に向かう方向への反力を発生させる与圧部を有する、
請求項7に記載のレンズ駆動装置。 - 前記介在部の前記本体部は、前記光軸の方向に延びる板状部と、前記光軸の方向に間隔をあけて並び、前記板状部と前記一対の接触部の何れかとを接続する複数の接続部とを有し、
前記複数の接続部は、前記光軸の方向における前記板状部の中心部から外側に位置するほど幅が広くなる、
請求項7または請求項8に記載のレンズ駆動装置。 - 前記第1のフレームおよび前記第2のフレームのそれぞれは、前記光軸の方向において前記介在部より長く、かつ、前記光軸の方向に延びる位置検出用のマグネット部を有する、
請求項7~9の何れか1項に記載のレンズ駆動装置。 - 前記第1のフレームおよび前記第2のフレームにおける各マグネット部に対向して配置され、所定の基準位置に基づいて前記マグネット部の位置を検出する位置検出部を備える、
請求項10に記載のレンズ駆動装置。 - 前記マグネット部は、前記位置検出部に対向する対向面を有し、前記対向面には、異なる極が隣接して配置されており、前記異なる極間の境界は、前記光軸に対して傾斜して延びる、
請求項11に記載のレンズ駆動装置。 - 前記マグネット部は、2つのマグネットを有し、
前記2つのマグネットは、前記各マグネット部と前記位置検出部とが対向する対向方向に沿った方向で、かつ、前記異なる極が前記位置検出部に対向するように、それぞれ着磁されている、
請求項12に記載のレンズ駆動装置。 - 前記位置検出部は、前記光軸の方向に複数並んで設けられている、
請求項11~13の何れか1項に記載のレンズ駆動装置。 - 前記第1のフレームおよび前記第2のフレームは、自身の移動可能距離よりも長く構成されている、
請求項7~14の何れか1項に記載のレンズ駆動装置。 - 前記第1の駆動軸および前記第2の駆動軸は、セラミック製である、
請求項5~15の何れか1項に記載のレンズ駆動装置。 - 前記第1のフレームは、第1の弾性部材を介して前記第1の可動部に接続され、
前記第2のフレームは、第2の弾性部材を介して前記第2の可動部に接続される、
請求項5~16の何れか1項に記載のレンズ駆動装置。 - 前記第1の可動部、前記第2の可動部、前記第1の駆動部および前記第2の駆動部を少なくとも収容する筐体を備え、
前記筐体は、前記光軸に対して前記第1の超音波モータおよび前記第2の超音波モータが配置された両側で前記光軸の方向に延びる一対の壁部と、前記一対の壁部を架橋する金属板とを有する、
請求項1~17の何れか1項に記載のレンズ駆動装置。 - 前記金属板は、前記一対の壁部の底部を架橋し、
前記光軸の方向において光入射側に位置する前記金属板の端部は、前記壁部側に折り曲げて構成されている、
請求項18に記載のレンズ駆動装置。 - 前記金属板は、前記光軸の方向に並ぶ複数のハーフパンチを有する、
請求項18または請求項19に記載のレンズ駆動装置。 - 前記一対の壁部は、樹脂製であり、
前記金属板は、インサート成形により、前記一対の壁部と一体化されている、
請求項18~20の何れか1項に記載のレンズ駆動装置。 - 前記一対の壁部のそれぞれは、前記光軸から所定距離の位置に配置され、
前記第1の超音波モータおよび前記第2の超音波モータは、前記一対の壁部のそれぞれに設けられる、
請求項18~21の何れか1項に記載のレンズ駆動装置。 - 前記第1の超音波モータおよび前記第2の超音波モータのそれぞれは、高周波電圧の印加により振動を発生する振動素子と、前記光軸の方向に対して傾斜した傾斜方向に振動するよう前記振動素子の振動に共振する共振部と、を有し、
前記第1の駆動部および前記第2の駆動部のそれぞれは、前記共振部の共振に従って前記光軸の方向に移動して、前記光軸の方向の移動を伝達するよう前記第1の可動部および前記第2の可動部のそれぞれに接続する移動部を有する、
請求項1~22の何れか1項に記載のレンズ駆動装置。 - 前記移動部は、
それぞれ前記光軸の方向に移動可能に支持された第1のフレームおよび第2のフレームと、
前記共振部から前記傾斜方向に押圧されることで前記光軸の方向に摺動するよう前記共振部にそれぞれ接触して配置され、かつ、前記第1のフレームおよび前記第2のフレームのそれぞれに固定された第1の介在部および第2の介在部と、
を有し、
前記第1のフレームは、第1の弾性部材を介して前記第1の可動部に接続され、
前記第2のフレームは、第2の弾性部材を介して前記第2の可動部に接続される、
請求項23に記載のレンズ駆動装置。 - 14ビット以上の分解能で前記第1の可動部および前記第2の可動部の駆動を制御する駆動制御部を備える、
請求項1~24の何れか1項に記載のレンズ駆動装置。 - 請求項1~25の何れか1項に記載のレンズ駆動装置と、
前記第1の可動部および前記第2の可動部に保持される前記第1の可動レンズおよび前記第2の可動レンズを含むレンズ部と、
前記レンズ部により結像された被写体像を撮像する撮像部と、
を備え、
前記第1の可動レンズおよび前記第2の可動レンズを前記光軸の方向に駆動する、
カメラモジュール。 - 情報機器または輸送機器であるカメラ搭載装置であって、
請求項26に記載のカメラモジュールと、
前記カメラモジュールで得られた画像情報を処理する撮像制御部と、
を備えるカメラ搭載装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019236300A JP7397302B2 (ja) | 2019-12-26 | 2019-12-26 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
| US17/785,463 US20230022577A1 (en) | 2019-12-26 | 2020-12-21 | Lens drive device, camera module, and camera mount device |
| PCT/JP2020/047620 WO2021132129A1 (ja) | 2019-12-26 | 2020-12-21 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
| KR1020227019347A KR20220121795A (ko) | 2019-12-26 | 2020-12-21 | 렌즈 구동 장치, 카메라 모듈 및 카메라 탑재 장치 |
| CN202080089267.6A CN114868064A (zh) | 2019-12-26 | 2020-12-21 | 透镜驱动装置、摄像机模块及摄像机搭载装置 |
| JP2023200858A JP2024015082A (ja) | 2019-12-26 | 2023-11-28 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019236300A JP7397302B2 (ja) | 2019-12-26 | 2019-12-26 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023200858A Division JP2024015082A (ja) | 2019-12-26 | 2023-11-28 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021105653A JP2021105653A (ja) | 2021-07-26 |
| JP2021105653A5 JP2021105653A5 (ja) | 2022-12-15 |
| JP7397302B2 true JP7397302B2 (ja) | 2023-12-13 |
Family
ID=76576073
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019236300A Active JP7397302B2 (ja) | 2019-12-26 | 2019-12-26 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
| JP2023200858A Pending JP2024015082A (ja) | 2019-12-26 | 2023-11-28 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023200858A Pending JP2024015082A (ja) | 2019-12-26 | 2023-11-28 | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230022577A1 (ja) |
| JP (2) | JP7397302B2 (ja) |
| KR (1) | KR20220121795A (ja) |
| CN (1) | CN114868064A (ja) |
| WO (1) | WO2021132129A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115903166A (zh) * | 2021-09-30 | 2023-04-04 | 信泰光学(深圳)有限公司 | 镜头 |
| CN114706186B (zh) * | 2022-04-02 | 2023-05-16 | 上海比路电子股份有限公司 | 光学变焦马达、摄像装置及移动终端 |
| WO2024034170A1 (ja) * | 2022-08-10 | 2024-02-15 | アルプスアルパイン株式会社 | レンズホルダ駆動装置 |
| WO2024157197A1 (en) * | 2023-01-27 | 2024-08-02 | Corephotonics Ltd. | Hall sensor - magnet geometries for large stroke linear position sensing |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000014176A (ja) | 1998-06-17 | 2000-01-14 | Minolta Co Ltd | 駆動装置 |
| JP2002189165A (ja) | 2000-12-19 | 2002-07-05 | Minolta Co Ltd | レンズ駆動装置 |
| JP2005057839A (ja) | 2003-08-06 | 2005-03-03 | Olympus Corp | 振動波リニアモータ及びそれを用いたレンズ装置 |
| JP2010066713A (ja) | 2008-09-12 | 2010-03-25 | Fujinon Corp | レンズ装置 |
| JP2015503775A (ja) | 2012-01-17 | 2015-02-02 | ボリーメディアコミュニケーションズ(シンチェン)カンパニーリミテッドBoly Media Communications (Shenzhen)Co., Ltd | 可変焦点レンズ装置及び光学結像装置 |
| JP2017051041A (ja) | 2015-09-04 | 2017-03-09 | キヤノン株式会社 | 駆動装置 |
| JP2019097346A (ja) | 2017-11-27 | 2019-06-20 | キヤノン株式会社 | 振動型モータ、レンズ装置、および、電子機器 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04147107A (ja) * | 1990-10-09 | 1992-05-20 | Canon Inc | 駆動機構を有する機器 |
| JPH11265212A (ja) * | 1998-03-17 | 1999-09-28 | Minolta Co Ltd | 駆動装置 |
| JP6806991B2 (ja) | 2016-08-30 | 2021-01-06 | ミツミ電機株式会社 | カメラモジュール |
-
2019
- 2019-12-26 JP JP2019236300A patent/JP7397302B2/ja active Active
-
2020
- 2020-12-21 KR KR1020227019347A patent/KR20220121795A/ko active Search and Examination
- 2020-12-21 WO PCT/JP2020/047620 patent/WO2021132129A1/ja active Application Filing
- 2020-12-21 US US17/785,463 patent/US20230022577A1/en active Pending
- 2020-12-21 CN CN202080089267.6A patent/CN114868064A/zh active Pending
-
2023
- 2023-11-28 JP JP2023200858A patent/JP2024015082A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000014176A (ja) | 1998-06-17 | 2000-01-14 | Minolta Co Ltd | 駆動装置 |
| JP2002189165A (ja) | 2000-12-19 | 2002-07-05 | Minolta Co Ltd | レンズ駆動装置 |
| JP2005057839A (ja) | 2003-08-06 | 2005-03-03 | Olympus Corp | 振動波リニアモータ及びそれを用いたレンズ装置 |
| JP2010066713A (ja) | 2008-09-12 | 2010-03-25 | Fujinon Corp | レンズ装置 |
| JP2015503775A (ja) | 2012-01-17 | 2015-02-02 | ボリーメディアコミュニケーションズ(シンチェン)カンパニーリミテッドBoly Media Communications (Shenzhen)Co., Ltd | 可変焦点レンズ装置及び光学結像装置 |
| JP2017051041A (ja) | 2015-09-04 | 2017-03-09 | キヤノン株式会社 | 駆動装置 |
| JP2019097346A (ja) | 2017-11-27 | 2019-06-20 | キヤノン株式会社 | 振動型モータ、レンズ装置、および、電子機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024015082A (ja) | 2024-02-01 |
| CN114868064A (zh) | 2022-08-05 |
| JP2021105653A (ja) | 2021-07-26 |
| WO2021132129A1 (ja) | 2021-07-01 |
| KR20220121795A (ko) | 2022-09-01 |
| US20230022577A1 (en) | 2023-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7397302B2 (ja) | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 | |
| KR102549848B1 (ko) | 렌즈 구동 장치, 카메라 모듈, 및 카메라 탑재 장치 | |
| JP7185176B1 (ja) | 超音波駆動装置、カメラモジュール、及びカメラ搭載装置 | |
| JP7057516B2 (ja) | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 | |
| US20230185170A1 (en) | Optical element driving device, camera module, and camera-equipped device | |
| JP7075029B2 (ja) | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 | |
| US20230408840A1 (en) | Optical-element driving device, camera module and camera-mounted device | |
| US20230408890A1 (en) | Optical element driving device, camera module, and camera-equipped device | |
| JP7440781B2 (ja) | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 | |
| US20230273392A1 (en) | Lens driving device, camera module, and camera-equipped device | |
| WO2021200012A1 (ja) | レンズ駆動装置、カメラモジュールおよびカメラ搭載装置 | |
| US20230408790A1 (en) | Drive unit, lens driving device, camera module, and camera-equipped device | |
| JP7269521B2 (ja) | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 | |
| JP7093050B2 (ja) | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 | |
| JP7372563B2 (ja) | レンズ駆動装置、カメラモジュール、及びカメラ搭載装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221207 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231031 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231113 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7397302 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |