JP6511010B2 - アクチュエータ装置および制御方法 - Google Patents
アクチュエータ装置および制御方法Info
- Publication number
- JP6511010B2 JP6511010B2 JP2016095509A JP2016095509A JP6511010B2 JP 6511010 B2 JP6511010 B2 JP 6511010B2 JP 2016095509 A JP2016095509 A JP 2016095509A JP 2016095509 A JP2016095509 A JP 2016095509A JP 6511010 B2 JP6511010 B2 JP 6511010B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator
- pressure
- cylinder
- piston
- rotational speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B7/00—Systems in which the movement produced is definitely related to the output of a volumetric pump; Telemotors
- F15B7/001—With multiple inputs, e.g. for dual control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/14—Programme-controlled manipulators characterised by positioning means for manipulator elements fluid
- B25J9/144—Linear actuators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/028—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the actuating force
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B21/00—Common features of fluid actuator systems; Fluid-pressure actuator systems or details thereof, not covered by any other group of this subclass
- F15B21/08—Servomotor systems incorporating electrically operated control means
- F15B21/087—Control strategy, e.g. with block diagram
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B7/00—Systems in which the movement produced is definitely related to the output of a volumetric pump; Telemotors
- F15B7/06—Details
- F15B7/10—Compensation of the liquid content in a system
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B9/00—Servomotors with follow-up action, e.g. obtained by feed-back control, i.e. in which the position of the actuated member conforms with that of the controlling member
- F15B9/02—Servomotors with follow-up action, e.g. obtained by feed-back control, i.e. in which the position of the actuated member conforms with that of the controlling member with servomotors of the reciprocatable or oscillatable type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00535—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated
- A61B2017/00539—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated hydraulically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00535—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated
- A61B2017/00544—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated pneumatically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20507—Type of prime mover
- F15B2211/20515—Electric motor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6313—Electronic controllers using input signals representing a pressure the pressure being a load pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/633—Electronic controllers using input signals representing a state of the prime mover, e.g. torque or rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6336—Electronic controllers using input signals representing a state of the output member, e.g. position, speed or acceleration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6651—Control of the prime mover, e.g. control of the output torque or rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6653—Pressure control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6656—Closed loop control, i.e. control using feedback
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7051—Linear output members
- F15B2211/7053—Double-acting output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/75—Control of speed of the output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/76—Control of force or torque of the output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/765—Control of position or angle of the output member
- F15B2211/7656—Control of position or angle of the output member with continuous position control
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Fluid Mechanics (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Robotics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Fluid-Pressure Circuits (AREA)
- Manipulator (AREA)
- Supply Devices, Intensifiers, Converters, And Telemotors (AREA)
- Actuator (AREA)
Description
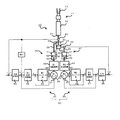
まず、本発明の実施の形態に係るアクチュエータ装置10の構成について、図1を参照して説明する。以下、本発明に係るアクチュエータ装置10を医療用器具11に適用した場合について説明する。ただし、アクチュエータ装置10は医療用器具11に適用する場合に限定されない。
上記実施の形態では、シリンダ20に液圧シリンダを用いたが、これに代えて、シリンダ20に気圧シリンダを用いてもよい。この場合、気圧シリンダには、空気などが作動流体として用いられる。
12 :医療用器具
20 :シリンダ
21 :ピストン
22 :位置検出器
23 :圧力検出器
24 :ロッド側圧力室(圧力室)
25 :ヘッド側圧力室(圧力室)
27 :ロッド
30 :第1アクチュエータ
40 :第2アクチュエータ
50 :制御器
Claims (5)
- 内部空間を有するシリンダと、
前記内部空間に収容され、前記シリンダと共に一対の圧力室を形成し、前記シリンダに対して相対移動するピストンと、
前記一対の圧力室の一方に接続され、且つ、第1流体シリンダ、第1電動モータ及び第1直動機構を有している第1アクチュエータと、
前記一対の圧力室の他方に接続され、且つ、第2流体シリンダ、第2電動モータ及び第2直動機構を有している第2アクチュエータと、
前記シリンダに対する前記ピストンの位置を検出する位置検出器と、
前記一対の圧力室のいずれか一方の圧力室における圧力を検出する圧力検出器と、
前記第1アクチュエータおよび前記第2アクチュエータを制御する制御器と、を備え、
前記制御器は、
前記位置検出器により検出された位置が目標位置に近づくように前記第1アクチュエータを制御し、前記圧力検出器により検出された圧力が目標圧力に近づくように前記第2アクチュエータを制御するよう構成され、
前記第1アクチュエータの制御において、前記目標位置、及び、前記位置検出器により検出された前記ピストンの位置に基づいて、前記第1電動モータの目標回転速度を算出し、
前記目標回転速度、及び、回転速度センサにより検出された前記第1電動モータの回転速度に基づいて、又は、前記目標回転速度、及び、前記位置検出器により検出された前記ピストンの位置に応じた移動速度に基づいて、前記第1電動モータの回転を制御している、アクチュエータ装置。 - 前記シリンダは、前記第1アクチュエータおよび前記第2アクチュエータにより前記一対の圧力室のそれぞれの液体の圧力が調整される液圧シリンダ、または、前記第1アクチュエータおよび前記第2アクチュエータにより前記一対の圧力室のそれぞれの気体の圧力が調整される気圧シリンダである、請求項1に記載のアクチュエータ装置。
- 前記第1アクチュエータおよび前記第2アクチュエータが液圧シリンダまたは気圧シリンダである、請求項1または2に記載のアクチュエータ装置。
- 先端が医療用器具の施術部分に接続され、かつ、基端が前記ピストンに結合されるロッドをさらに備える、請求項1乃至3のいずれか一項に記載のアクチュエータ装置。
- 内部空間を有するシリンダと、
前記内部空間に収容され、前記シリンダと共に一対の圧力室を形成し、前記シリンダに対して相対移動するピストンと、
前記一対の圧力室の一方に接続され、且つ、第1流体シリンダ、第1電動モータ及び第1直動機構を有している第1アクチュエータと、
前記一対の圧力室の他方に接続され、且つ、第2流体シリンダ、第2電動モータ及び第2直動機構を有している第2アクチュエータと、
前記シリンダに対する前記ピストンの位置を検出する位置検出器と、
前記一対の圧力室のいずれか一方の圧力室における圧力を検出する圧力検出器と、を備えた、アクチュエータ装置の制御方法であって、
前記位置検出器により検出された位置が目標位置に近づくように前記第1アクチュエータを制御し、前記圧力検出器により検出された圧力が目標圧力に近づくように前記第2アクチュエータを制御し、
前記第1アクチュエータの制御において、前記目標位置、及び、前記位置検出器により検出された前記ピストンの位置に基づいて、前記第1電動モータの目標回転速度を算出し、
前記目標回転速度、及び、回転速度センサにより検出された前記第1電動モータの回転速度に基づいて、又は、前記目標回転速度、及び、前記位置検出器により検出された前記ピストンの位置に応じた移動速度に基づいて、前記第1電動モータの回転を制御する、アクチュエータ装置の制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095509A JP6511010B2 (ja) | 2016-05-11 | 2016-05-11 | アクチュエータ装置および制御方法 |
| PCT/JP2017/017575 WO2017195786A1 (ja) | 2016-05-11 | 2017-05-09 | アクチュエータ装置および制御方法 |
| US16/099,903 US10814499B2 (en) | 2016-05-11 | 2017-05-09 | Actuator device and control method |
| TW106115442A TWI640302B (zh) | 2016-05-11 | 2017-05-10 | Actuator device and control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095509A JP6511010B2 (ja) | 2016-05-11 | 2016-05-11 | アクチュエータ装置および制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017203504A JP2017203504A (ja) | 2017-11-16 |
| JP2017203504A5 JP2017203504A5 (ja) | 2019-01-31 |
| JP6511010B2 true JP6511010B2 (ja) | 2019-05-08 |
Family
ID=60267881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016095509A Active JP6511010B2 (ja) | 2016-05-11 | 2016-05-11 | アクチュエータ装置および制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10814499B2 (ja) |
| JP (1) | JP6511010B2 (ja) |
| TW (1) | TWI640302B (ja) |
| WO (1) | WO2017195786A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6839874B1 (ja) * | 2020-02-12 | 2021-03-10 | リバーフィールド株式会社 | 手術用ロボット |
| JP7401373B2 (ja) * | 2020-03-26 | 2023-12-19 | 住友重機械工業株式会社 | 制御装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5791231A (en) * | 1993-05-17 | 1998-08-11 | Endorobotics Corporation | Surgical robotic system and hydraulic actuator therefor |
| JP3481277B2 (ja) * | 1993-11-05 | 2003-12-22 | 株式会社トキメック | 電気−液圧トランスミッション装置 |
| JPH10169602A (ja) * | 1996-12-11 | 1998-06-23 | Opton Co Ltd | 液圧駆動装置 |
| JP3816227B2 (ja) * | 1998-03-23 | 2006-08-30 | 東芝機械株式会社 | 流体圧装置 |
| JP2001090704A (ja) * | 1999-09-21 | 2001-04-03 | Tokimec Inc | 駆動装置 |
| JP2001214903A (ja) * | 2000-02-02 | 2001-08-10 | Kayaba Ind Co Ltd | 油圧式駆動装置 |
| JP2002089503A (ja) * | 2000-09-18 | 2002-03-27 | Koganei Corp | アクチュエータ |
| JP2004263645A (ja) | 2003-03-03 | 2004-09-24 | Opton Co Ltd | 液圧装置 |
| JP4200284B2 (ja) * | 2003-03-20 | 2008-12-24 | Smc株式会社 | 加圧シリンダの高速駆動方法及びそのシステム |
| JP2008298226A (ja) | 2007-06-01 | 2008-12-11 | Yuken Kogyo Co Ltd | 油圧駆動装置 |
| JP5628134B2 (ja) * | 2011-11-07 | 2014-11-19 | 住友重機械工業株式会社 | 油圧閉回路システム |
| JP5754820B2 (ja) * | 2013-11-28 | 2015-07-29 | 国立大学法人東京工業大学 | 手術用ロボット |
-
2016
- 2016-05-11 JP JP2016095509A patent/JP6511010B2/ja active Active
-
2017
- 2017-05-09 WO PCT/JP2017/017575 patent/WO2017195786A1/ja active Application Filing
- 2017-05-09 US US16/099,903 patent/US10814499B2/en active Active
- 2017-05-10 TW TW106115442A patent/TWI640302B/zh not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| US10814499B2 (en) | 2020-10-27 |
| TWI640302B (zh) | 2018-11-11 |
| JP2017203504A (ja) | 2017-11-16 |
| TW201740887A (zh) | 2017-12-01 |
| WO2017195786A1 (ja) | 2017-11-16 |
| US20190143540A1 (en) | 2019-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7445260B2 (en) | Gripping type hand | |
| WO2018123753A1 (ja) | 液圧鉗子システム | |
| JP5927259B2 (ja) | 力制御を実行するロボットシステム | |
| JP5893666B2 (ja) | 力に応じて動かすロボットのロボット制御装置およびロボットシステム | |
| US8253367B2 (en) | Control apparatus, control method, and control program for elastic actuator drive mechanism | |
| JP5946859B2 (ja) | 力に応じて動かすロボットのロボット制御装置およびロボットシステム | |
| US10603798B2 (en) | Robot | |
| JP5893664B2 (ja) | 作用された力に応じて移動されるロボットを制御するロボット制御装置 | |
| JP2015202536A (ja) | 作用された力に応じて移動されるロボットを制御するロボット制御装置 | |
| JP6511010B2 (ja) | アクチュエータ装置および制御方法 | |
| US10562191B2 (en) | Method of controlling devices with sensation of applied force | |
| JP2006220283A (ja) | 位置決め制御用空気圧シリンダ | |
| JP3329443B2 (ja) | パラレルリンク型力覚入出力装置 | |
| JP2017099820A (ja) | 操作システム | |
| CN116261432A (zh) | 用于跟踪解剖运动的系统和方法 | |
| JP2012051043A (ja) | ロボットシステムまたはロボット制御装置 | |
| JP7111498B2 (ja) | ロボットの制御装置およびロボットの制御方法 | |
| JP6632507B2 (ja) | リンク機構の制御装置、マニピュレータ、及びリンク機構の制御方法 | |
| GB2572848A (en) | Actively damped robot | |
| US20120023765A1 (en) | Three-dimensional measuring instrument | |
| JP6789790B2 (ja) | 医療用光学機器および保持装置を備える医療装置、および医療装置を動作させる方法 | |
| JP2017203504A5 (ja) | ||
| US20180199953A1 (en) | Forceps system | |
| JP6836341B2 (ja) | シリンダ制御装置 | |
| JP2583272B2 (ja) | ロボットの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181009 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181211 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20181211 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190405 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6511010 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |