JP5893666B2 - 力に応じて動かすロボットのロボット制御装置およびロボットシステム - Google Patents
力に応じて動かすロボットのロボット制御装置およびロボットシステム Download PDFInfo
- Publication number
- JP5893666B2 JP5893666B2 JP2014082732A JP2014082732A JP5893666B2 JP 5893666 B2 JP5893666 B2 JP 5893666B2 JP 2014082732 A JP2014082732 A JP 2014082732A JP 2014082732 A JP2014082732 A JP 2014082732A JP 5893666 B2 JP5893666 B2 JP 5893666B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- axis
- robot
- axes
- operation axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0081—Programme-controlled manipulators with master teach-in means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
Description
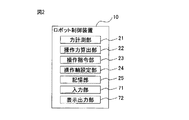
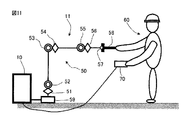
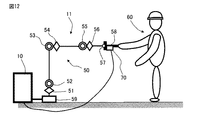
11 ロボットシステム
21 力計測部
22 操作力算出部
23 操作指令部
24 操作軸設定部
25 記憶部
31 操作軸
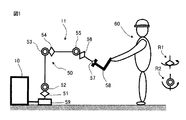
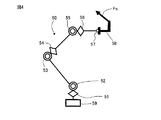
50 ロボット
51 J1軸
52 J2軸
53 J3軸
54 J4軸
55 J5軸
56 J6軸
57 フランジ部
58 先端部
59 台座
60 操作者
70 教示操作装置
71 入力部
72 表示出力部
Claims (10)
- 複数の軸から成るロボットに作用させた力にもとづいて、前記ロボットを移動させるロボット制御装置において、
前記ロボットの先端部に作用させた力を計測する力計測部と、
前記力計測部が計測した力をもとに、前記ロボットの各軸の位置の移動操作をする操作力を算出する操作力算出部と、
前記ロボットを移動させる指令を出力する操作指令部と、
前記複数の軸の内、力に応じて移動することが許可されているときに力に応じて移動させる1つ又は2つ以上の軸を操作軸として設定し、さらに力の方向に応じた前記操作軸の移動方向を設定する操作軸設定部と、を備え、
前記操作軸設定部は、前記操作軸が1つであるときに、該操作軸を力に応じて移動することが許可された操作軸として設定し、前記操作軸が2つ以上であるときに、移動操作の状況に応じて、前記操作軸に対する前記力計測部が計測した力の方向をもとに、前記操作軸とした軸の各々に対して、力に応じて移動することが許可された操作軸か、力が作用していても移動させない操作軸のいずれとするかを設定し、
前記操作指令部は、前記操作軸設定部の設定、および、前記操作力算出部が算出した操作力にもとづいて、前記操作軸の位置を移動させる操作指令を出力する、ロボット制御装置。 - 複数の軸から成るロボットに作用させた力にもとづいて、前記ロボットを移動させるロボット制御装置において、
前記ロボットの先端部に作用させた力を計測する力計測部と、
前記力計測部が計測した力をもとに、前記ロボットの各軸の位置の移動操作をする操作力を算出する操作力算出部と、
前記ロボットを移動させる指令を出力する操作指令部と、
前記複数の軸の内、力に応じて移動することが許可されているときに力に応じて移動させる1つ又は2つ以上の軸を操作軸として設定し、さらに力の方向に応じた前記操作軸の移動方向を設定する操作軸設定部と、を備え、
前記操作軸設定部は、前記操作軸が1つであるときに、該操作軸を力に応じて移動することが許可された操作軸として設定し、前記操作軸が2つ以上であるときに、移動操作の状況に応じて、前記操作軸と前記ロボットの先端部との位置関係をもとに、前記操作軸とした軸の各々に対して、力に応じて移動することが許可された操作軸か、力が作用していても移動させない操作軸のいずれとするかを設定し、
前記操作指令部は、前記操作軸設定部の設定、および、前記操作力算出部が算出した操作力にもとづいて、前記操作軸の位置を移動させる操作指令を出力する、ロボット制御装置。 - 複数の軸から成るロボットに作用させた力にもとづいて、前記ロボットを移動させるロボット制御装置において、
前記ロボットの先端部に作用させた力を計測する力計測部と、
前記力計測部が計測した力をもとに、前記ロボットの各軸の位置の移動操作をする操作力を算出する操作力算出部と、
前記ロボットを移動させる指令を出力する操作指令部と、
前記複数の軸の内、力に応じて移動することが許可されているときに力に応じて移動させる1つ又は2つ以上の軸を操作軸として設定し、さらに力の方向に応じた前記操作軸の移動方向を設定する操作軸設定部と、を備え、
前記操作軸設定部は、前記操作軸が1つであるときに、該操作軸を力に応じて移動することが許可された操作軸として設定し、前記操作軸が2つ以上であるときに、移動操作の状況に応じて、前記操作軸に対する前記力計測部が計測した力の方向、および、前記操作軸と前記ロボットの先端部との位置関係の内の少なくとも一方と、所定の優先順位とをもとに、前記操作軸とした軸の各々に対して、力に応じて移動することが許可された操作軸か、力が作用していても移動させない操作軸のいずれとするかを設定し、
前記操作指令部は、前記操作軸設定部の設定、および、前記操作力算出部が算出した操作力にもとづいて、前記操作軸の位置を移動させる操作指令を出力する、ロボット制御装置。 - 2つ以上の回転軸を含む複数の軸から成るロボットに作用させた力にもとづいて、前記ロボットを移動させるロボット制御装置において、
前記ロボットの先端部に作用させた力を計測する力計測部と、
前記力計測部が計測した力をもとに、前記ロボットの各軸の位置の移動操作をする操作力を算出する操作力算出部と、
前記ロボットを移動させる指令を出力する操作指令部と、
前記複数の軸の内、力に応じて移動させる軸を操作軸として設定し、さらに力の方向に応じた前記操作軸の移動方向を設定する操作軸設定部と、を備え、
前記操作軸設定部は、前記複数の軸の内、前記複数の軸の位置によらず回転軸の回転中心線が直交する2つの回転軸を前記操作軸として設定し、
前記操作指令部は、前記操作軸設定部の設定、および、前記操作力算出部が算出した操作力にもとづいて、前記操作軸の位置を移動させる操作指令を出力する、ロボット制御装置。 - 2つ以上の回転軸を含む複数の軸から成るロボットに作用させた力にもとづいて、前記ロボットを移動させるロボット制御装置において、
前記ロボットの先端部に作用させた力を計測する力計測部と、
前記力計測部が計測した力をもとに、前記ロボットの各軸の位置の移動操作をする操作力を算出する操作力算出部と、
前記ロボットを移動させる指令を出力する操作指令部と、
前記複数の軸の内、力に応じて移動することが許可されているときに力に応じて移動させる軸を操作軸として設定し、さらに力の方向に応じた前記操作軸の移動方向を設定する操作軸設定部と、を備え、
前記操作軸設定部は、前記複数の軸の内、前記複数の軸の位置によらず回転軸の回転中心線が直交する2つの回転軸を前記操作軸として設定し、移動操作の状況に応じて、前記操作軸に対する前記力計測部が計測した力の方向、前記操作軸と前記ロボットの先端部との位置関係、および、所定の優先順位の内、少なくとも1つをもとに、前記操作軸とした軸の各々に対して、力に応じて移動することが許可された操作軸か、力が作用していても移動させない操作軸のいずれとするかを設定し、
前記操作指令部は、前記操作軸設定部の設定、および、前記操作力算出部が算出した操作力にもとづいて、前記操作軸の位置を移動させる操作指令を出力する、ロボット制御装置。 - 請求項1〜5のいずれか1項に記載のロボット制御装置と前記ロボットとを含むロボットシステム。
- 前記ロボットシステムは、前記ロボット制御装置に設定を入力する教示操作装置を備え、
前記操作軸設定部は、前記教示操作装置からの入力をもとに前記操作軸を設定し、
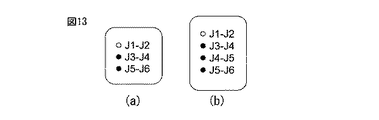
前記教示操作装置は、前記操作軸として設定可能な軸の内、操作軸とする軸が組み合わされた選択肢から選択して入力する、請求項6に記載のロボットシステム。 - 前記ロボットシステムは、前記ロボット制御装置に設定を入力する教示操作装置を備え、
前記操作軸設定部は、前記教示操作装置からの入力をもとに前記操作軸を設定し、
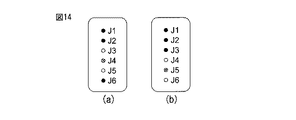
前記教示操作装置は、前記複数の軸の内、前記操作軸として選択可能な軸を示し、選択された軸をもとに、前記選択された軸以外の軸において、前記操作軸として前記選択された軸と同時に選択可能であることと、前記選択された軸と同時に選択可能でないこととの少なくとも一方を表示する、請求項6に記載のロボットシステム。 - 請求項1〜3および5のいずれか1項に記載のロボット制御装置と前記ロボットとを含むロボットシステムであって、
前記ロボットシステムは表示装置を備え、
前記表示装置は、前記操作軸設定部が前記操作軸を、力に応じて移動することが許可された操作軸か、力が作用していても移動させない操作軸のいずれとするかを設定するときの設定条件を表示する、ロボットシステム。 - 前記教示操作装置は、前記ロボットの現在の軸の位置をもとに、前記複数の軸の内の回転軸の回転中心線から、前記ロボットの先端部までの最短距離が所定の閾値以下であるときに、前記回転軸の回転中心線の付近に前記ロボットの先端部が存在することを示すか、または、前記操作軸として該軸を含む軸の設定を設定可能としないことを示す、請求項7または8に記載のロボットシステム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014082732A JP5893666B2 (ja) | 2014-04-14 | 2014-04-14 | 力に応じて動かすロボットのロボット制御装置およびロボットシステム |
| CN201510152002.7A CN104972463B (zh) | 2014-04-14 | 2015-04-01 | 根据力动作的机器人的机器人控制装置及机器人系统 |
| DE102015004484.2A DE102015004484B4 (de) | 2014-04-14 | 2015-04-07 | Robotersteuerung und Robotersystem zum Bewegen eines Roboters in Erwiderung einer Kraft |
| US14/684,930 US9566707B2 (en) | 2014-04-14 | 2015-04-13 | Robot controller and robot system for moving robot in response to force |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014082732A JP5893666B2 (ja) | 2014-04-14 | 2014-04-14 | 力に応じて動かすロボットのロボット制御装置およびロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015202537A JP2015202537A (ja) | 2015-11-16 |
| JP5893666B2 true JP5893666B2 (ja) | 2016-03-23 |
Family
ID=54193327
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014082732A Active JP5893666B2 (ja) | 2014-04-14 | 2014-04-14 | 力に応じて動かすロボットのロボット制御装置およびロボットシステム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9566707B2 (ja) |
| JP (1) | JP5893666B2 (ja) |
| CN (1) | CN104972463B (ja) |
| DE (1) | DE102015004484B4 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170133143A (ko) * | 2016-05-25 | 2017-12-05 | 한화테크윈 주식회사 | 로봇 팔 제어 장치 및 방법 |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10768708B1 (en) * | 2014-08-21 | 2020-09-08 | Ultrahaptics IP Two Limited | Systems and methods of interacting with a robotic tool using free-form gestures |
| JP6924145B2 (ja) * | 2015-10-14 | 2021-08-25 | 川崎重工業株式会社 | ロボット教示方法及びロボットアーム制御装置 |
| JP6577326B2 (ja) * | 2015-10-16 | 2019-09-18 | ファナック株式会社 | 人と協働して物体を運搬するロボットを制御するロボット制御装置、ロボットシステム、およびその方法 |
| DE102015222168B4 (de) | 2015-11-11 | 2024-02-22 | Kuka Roboter Gmbh | Verfahren und computerprogramm zur korrektur von fehlern eines manipulatorsystems |
| KR101898092B1 (ko) * | 2016-06-17 | 2018-09-12 | 주식회사 뉴로메카 | 다자유도 로봇의 말단 제어를 위한 콘트롤러, 상기 콘트롤러를 이용한 다자유도 로봇 제어방법 및 이에 의해 동작하는 로봇 |
| JPWO2018012110A1 (ja) | 2016-07-11 | 2019-04-25 | ソニー株式会社 | 処理装置、システム、および制御方法 |
| TWI587996B (zh) * | 2016-08-25 | 2017-06-21 | 財團法人工業技術研究院 | 機械手臂教導裝置 |
| JP2018069361A (ja) * | 2016-10-27 | 2018-05-10 | セイコーエプソン株式会社 | 力制御座標軸設定装置、ロボットおよび力制御座標軸設定方法 |
| JP6633580B2 (ja) | 2017-08-02 | 2020-01-22 | ファナック株式会社 | ロボットシステム及びロボット制御装置 |
| DE102017124356B3 (de) | 2017-10-18 | 2018-12-27 | Franka Emika Gmbh | Robotersystem, Vorrichtung und Verfahren zur Applikation einer Prozesskraft auf ein Objekt |
| DE102017011130B4 (de) * | 2017-12-01 | 2021-03-04 | Kuka Deutschland Gmbh | Verfahren und System zum Steuern eines Roboters |
| CN109927056B (zh) * | 2017-12-19 | 2020-11-10 | 合肥欣奕华智能机器有限公司 | 一种示教摇杆及机器人示教方法、机器人控制系统 |
| DE102018200864B3 (de) | 2018-01-19 | 2019-02-07 | Kuka Deutschland Gmbh | Verfahren und System zum Steuern eines Roboters |
| DE102018207921B3 (de) | 2018-05-18 | 2019-06-19 | Kuka Deutschland Gmbh | Steuern eines Roboters |
| JP7124439B2 (ja) * | 2018-05-22 | 2022-08-24 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| DE102018208088A1 (de) * | 2018-05-23 | 2019-11-28 | Kuka Deutschland Gmbh | Verfahren und Steuerung zum Steuern eines Roboters |
| JP7048176B2 (ja) * | 2018-05-23 | 2022-04-05 | アズビル株式会社 | ロボットの直接教示装置及び直接教示方法 |
| DE102018127905A1 (de) | 2018-11-08 | 2020-05-14 | Franka Emika Gmbh | Roboter und Verfahren zur Steuerung der Bewegung eines Roboters |
| DE102018127921B4 (de) | 2018-11-08 | 2021-10-07 | Franka Emika Gmbh | Roboter und Verfahren zur Bestimmung eines Bewegungsraums mittels eines Roboters |
| JP7238450B2 (ja) * | 2019-02-14 | 2023-03-14 | 株式会社デンソーウェーブ | ロボットの制御装置およびロボットの制御方法 |
| CN112454333B (zh) | 2020-11-26 | 2022-02-11 | 青岛理工大学 | 基于图像分割及表面肌电信号的机器人示教系统及方法 |
| JP7351539B2 (ja) * | 2021-09-13 | 2023-09-27 | 株式会社メルティンMmi | 操作者の動きに基づいてロボットの動きを制御するためのプログラム、方法、およびシステム |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5685106A (en) | 1979-12-14 | 1981-07-11 | Hitachi Ltd | Robot teaching method |
| JPH06250728A (ja) * | 1993-02-26 | 1994-09-09 | Hitachi Constr Mach Co Ltd | ロボットの直接教示装置 |
| JPH085106A (ja) | 1994-06-21 | 1996-01-12 | Sanyo Electric Co Ltd | 空気調和装置 |
| US5495410A (en) * | 1994-08-12 | 1996-02-27 | Minnesota Mining And Manufacturing Company | Lead-through robot programming system |
| WO2004103651A1 (ja) * | 1999-06-01 | 2004-12-02 | Hirohiko Arai | 物体協調運搬ロボットの制御方法及びその装置 |
| US6385508B1 (en) * | 2000-10-31 | 2002-05-07 | Fanuc Robotics North America, Inc. | Lead-through teach handle assembly and method of teaching a robot assembly |
| EP1386699A4 (en) * | 2001-02-21 | 2006-04-19 | Sony Corp | ROBOT DEVICE AND METHOD FOR CONTROLLING THE OPERATION OF THE ROBOT DEVICE |
| JP2002239963A (ja) | 2001-02-21 | 2002-08-28 | Sony Corp | ロボット装置、ロボット装置の動作制御方法、プログラム及び記録媒体 |
| US7212886B2 (en) * | 2002-12-12 | 2007-05-01 | Kabushiki Kaisha Yaskawa Denki | Robot control apparatus and method |
| JP3923053B2 (ja) * | 2004-03-31 | 2007-05-30 | ファナック株式会社 | ロボット教示装置 |
| ATE476692T1 (de) * | 2006-02-23 | 2010-08-15 | Abb Ab | System zur steuerung der position und orientierung eines objekts je nach von einem benutzer empfangenen kräften und drehmomenten |
| JP4267027B2 (ja) | 2006-12-07 | 2009-05-27 | ファナック株式会社 | ロボット制御装置 |
| DE102007062108A1 (de) | 2007-12-21 | 2009-07-02 | Kuka Roboter Gmbh | Industrieroboter und Verfahren zum Programmieren eines Industrieroboters |
| JP4443614B2 (ja) * | 2008-02-27 | 2010-03-31 | トヨタ自動車株式会社 | パワーアシスト装置及びその制御方法 |
| DE102009018403A1 (de) * | 2009-04-22 | 2010-10-28 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zur Regelung eines Manipulators |
| EP2243585B1 (de) | 2009-04-22 | 2018-08-08 | KUKA Deutschland GmbH | Verfahren und Vorrichtung zur Steuerung einer Positioniervorrichtung zum Schweißen |
| JP4759660B2 (ja) * | 2009-08-21 | 2011-08-31 | パナソニック株式会社 | ロボットアーム制御用の装置、方法、プログラム及び集積電子回路、並びに、組立ロボット |
| DE102010019640A1 (de) * | 2010-05-06 | 2011-11-10 | Kuka Roboter Gmbh | Handgerät und Verfahren zum Steuern und/oder Programmieren eines Manipulators |
| DE102010029745A1 (de) * | 2010-06-07 | 2011-12-08 | Kuka Laboratories Gmbh | Werkstück-Handhabungssystem und Verfahren zum Manipulieren von Werkstücken mittels kooperierender Manipulatoren |
| JP5180414B2 (ja) * | 2011-01-27 | 2013-04-10 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアーム制御プログラム、並びに、集積電子回路 |
| JP5399593B2 (ja) * | 2011-11-10 | 2014-01-29 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| DE102012009010A1 (de) * | 2012-05-05 | 2012-12-13 | Daimler Ag | Verfahren zum Erzeugen einer Bewegung eines Roboters |
| DE102013218823A1 (de) * | 2013-09-19 | 2015-04-02 | Kuka Laboratories Gmbh | Verfahren zum manuell geführten Verstellen der Pose eines Manipulatorarms eines Industrieroboters und zugehöriger Industrieroboter |
| DE102013222456A1 (de) * | 2013-11-05 | 2015-05-07 | Kuka Laboratories Gmbh | Verfahren zum Programmieren von Bewegungsabläufen eines redundanten Industrieroboters und zugehöriger Industrieroboter |
| DE102014202145A1 (de) * | 2014-02-06 | 2015-08-06 | Kuka Roboter Gmbh | Verfahren zum Programmieren eines Industrieroboters und zugehörigerIndustrieroboter |
-
2014
- 2014-04-14 JP JP2014082732A patent/JP5893666B2/ja active Active
-
2015
- 2015-04-01 CN CN201510152002.7A patent/CN104972463B/zh active Active
- 2015-04-07 DE DE102015004484.2A patent/DE102015004484B4/de active Active
- 2015-04-13 US US14/684,930 patent/US9566707B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170133143A (ko) * | 2016-05-25 | 2017-12-05 | 한화테크윈 주식회사 | 로봇 팔 제어 장치 및 방법 |
| KR102486985B1 (ko) * | 2016-05-25 | 2023-01-10 | 주식회사 한화 | 로봇 팔 제어 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104972463A (zh) | 2015-10-14 |
| US9566707B2 (en) | 2017-02-14 |
| DE102015004484A1 (de) | 2015-10-15 |
| US20150290796A1 (en) | 2015-10-15 |
| CN104972463B (zh) | 2016-11-16 |
| DE102015004484B4 (de) | 2020-02-06 |
| JP2015202537A (ja) | 2015-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5893666B2 (ja) | 力に応じて動かすロボットのロボット制御装置およびロボットシステム | |
| JP5946859B2 (ja) | 力に応じて動かすロボットのロボット制御装置およびロボットシステム | |
| JP5893665B2 (ja) | 作用された力に応じて移動されるロボットを制御するロボット制御装置 | |
| US10423154B2 (en) | Robot system including force-controlled pushing device | |
| US9149931B2 (en) | Robot system, robot control device and method for controlling robot | |
| JP5893664B2 (ja) | 作用された力に応じて移動されるロボットを制御するロボット制御装置 | |
| US10751874B2 (en) | Method of teaching robot and robotic arm control device | |
| US11161249B2 (en) | Robot control apparatus and robot system | |
| JP2015085445A (ja) | ロボット制御装置、ロボットおよびロボット制御方法 | |
| JP6044511B2 (ja) | ロボットの制御方法及びロボットシステム | |
| JP5916583B2 (ja) | 多関節ロボットのウィービング制御装置 | |
| JP2016028842A (ja) | アクチュエータシステム | |
| JP2016190292A (ja) | ロボット制御装置、ロボットシステムおよびロボット制御方法 | |
| US20150051735A1 (en) | Control apparatus of robot, robot, and program thereof | |
| JP2021030364A (ja) | ロボット制御装置 | |
| CN115003463A (zh) | 机器人模拟装置 | |
| CN112118940B (zh) | 机械手的直接教示装置以及直接教示方法 | |
| JP2013094947A (ja) | ロボットアーム | |
| JP2007313612A (ja) | 多関節ロボットの制御装置及びその制御方法 | |
| JP2020110884A (ja) | ロボット制御装置、ロボット制御方法、及びロボット制御プログラム | |
| JP6238110B2 (ja) | ロボットハンドの制御方法と制御装置 | |
| JP2023096221A (ja) | ロボットの直接教示装置及び直接教示方法 | |
| JP2014140913A (ja) | ロボット制御装置、ロボット制御システム、及びロボットの制御方法 | |
| JPWO2013038544A1 (ja) | ロボットシステム及びロボット制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20150918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150929 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160224 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5893666 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |