JP4267027B2 - ロボット制御装置 - Google Patents
ロボット制御装置 Download PDFInfo
- Publication number
- JP4267027B2 JP4267027B2 JP2006330900A JP2006330900A JP4267027B2 JP 4267027 B2 JP4267027 B2 JP 4267027B2 JP 2006330900 A JP2006330900 A JP 2006330900A JP 2006330900 A JP2006330900 A JP 2006330900A JP 4267027 B2 JP4267027 B2 JP 4267027B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- robot
- robot arm
- target
- measuring means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1638—Programme controls characterised by the control loop compensation for arm bending/inertia, pay load weight/inertia
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39178—Compensation inertia arms
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39194—Compensation gravity
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39319—Force control, force as reference, active compliance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39341—Sliding mode based impedance control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39343—Force based impedance control
Description
すなわち3番目の発明においては、動力学項から得られた慣性力と作用方向に応じて力の目標値を変更することによって、ワークを所望の状態に加工することができる。
すなわち4番目の発明においては、動力学項から得られた慣性力と作用方向に応じて進行方向速度の目標値を変更することによって、ワークを所望の状態に加工することができる。
すなわち5番目の発明においては、動力学項から得られた慣性力と作用方向に応じて目標軌道を変更することによって、ワークを所望の状態に加工することができる。
すなわち6番目の発明においては、動力学項から得られた慣性力と作用方向に応じて力制御のゲインを変更することによって、ワークを所望の状態に加工することができる。
9番目の発明によれば、1番目から7番目のいずれかの発明において、前記力測定手段は前記ロボットアームを駆動するアクチュエータの電流値に基づいて力を推定する。
11番目の発明によれば、1番目から9番目のいずれかの発明において、前記ロボット制御装置により行われる力制御はダンピング制御である。
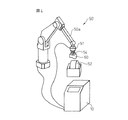
図1は本発明に基づくロボット制御装置により制御されるロボットの斜視図である。図1に示されるロボット50は、6自由度の多関節型ロボットである。このロボット50はロボット制御装置10により制御される。ロボット50のロボットアーム50aの先端には作業ツール52が取付けられている。図1に示される実施形態においては、作業ツール52は例えばグラインダである。図1に示される作業ツール52、例えばグラインダは作業台61上に予め固定されたワーク60を研磨するのに使用される。

ht=k0・Fs (2)
ここで、htは重力および動力学項の合力、または動力学項のみと比較するための閾値であり、k0は定数であり、Fsは予め設定した目標押付力である。このように閾値htを、予め設定した目標押付力Fsに基づいて定める場合には、作業ツール52、後述するハンド54またはワーク60が取替えられた場合であっても同一の調整値を使用することが可能となる。
(1)目標押付力および目標進行方向速度の両方を変更する場合、
(2)目標進行方向速度のみを変更する場合、
(3)目標押付力のみを変更する場合、
(4)目標軌道を調整する場合、
(5)力制御ゲインを調整する場合、について説明する。
・慣性力の押付方向成分の大きさ|h|が閾値htより小さい場合には、目標進行方向速度Vdはその設定値Vsを使用する。
・慣性力の押付方向成分の大きさ|h|が閾値htより大きい場合には、目標進行方向速度Vdを小さくすると共に、目標押付力Fdも小さくする(1−1)、(1−2)。これにより、目標進行方向速度Vdを小さくしてもワーク60が過剰に加工されるのを防止できる。(ただし、ワーク60と作業ツール52とが離れやすくなるような部分において目標進行方向速度Vdをそれほど低下させたくない場合には、目標押付力Fdを大きくする。)
(1−1)慣性力の押付方向成分の大きさ|h|が閾値htより大きい場合には、閾値を超えてから経過した時間tに基づいて目標進行方向速度Vdと目標押付力Fdとを変更する。
図5は目標進行方向速度Vdと閾値を超えてからの経過時間tとの関係を示す図である。図5においては、慣性力の押付方向成分の大きさ|h|が閾値htを超えた時点における速度をVxとする。(ここで、Vxは、|h|が閾値htを超えた後に下回り、また超えると、新たな値に更新される。)
Vd={(1−k11)・exp(−l11・t)+k11}・Vx (3)
ただし、0<l11、0<t、0≦k11<1、0<ht<|h|
Fd=m11・(Fs/Vs)・Vd+n11 (4)
ただし、0<m11
図6は係数α1、α2と慣性力の押付方向成分の大きさとの関係を示す図である。はじめに、以下の式(5)、(6)により表されるように、慣性力の押付方向成分の大きさ|h|に応じて変化する係数α1、α2を求める。
α1=(1−k12)・exp{−l12・(|h|−ht)}+k12 (5)
ただし、0<l12、0≦k12<1、0<ht<|h|
α2=(1−m12)・exp{−n12・(|h|−ht)}+m12 (6)
ただし、0<n12、0≦m12<1、0<ht<|h|
Vd=α1・Vs (7)
Fd=α2・Fs (8)
以下のように、作業ツール52とワーク60との相対速度を調節することにより、加工が不十分または過剰になるのを防止する。
・慣性力の押付方向成分の大きさ|h|が閾値htより小さい場合には、目標進行方向速度Vdはその設定値Vsを使用する。
・慣性力の押付方向成分の大きさ|h|が閾値htより大きく、かつ、慣性力の押付方向成分の作用する方向と押付方向が逆向きである場合には、目標進行方向速度Vdを小さくする(2−1)、(2−2)。
・慣性力の押付方向成分の大きさ|h|が閾値htより大きく、かつ、慣性力の押付方向成分の作用する方向と押付方向とが同じ向きである場合には、目標進行方向速度Vdを大きくする(2−3)、(2−4)。なお、目標進行方向速度Vdを大きくする理由は、目標進行方向速度Vdの増加を、押付力が大きくなることによる単位時間当たりの切削量の増加と相殺するためである。
(2−1)慣性力の押付方向成分の大きさ|h|が閾値htより大きく、かつ、慣性力の押付方向成分の作用する方向と押付方向が逆向きである場合には、閾値を超えてから経過した時間tに基づいて目標進行方向速度Vdを小さくする。このときには、前述した式(3)を使用して、目標進行方向速度Vdを小さくする。
(2−3)、(2−4)に関して目標進行方向速度Vdを大きくすることを記述したが、目標進行方向速度Vdを大きくする場合には慣性力の押付方向成分の大きさ|h|をさらに大きくする副作用が生じるので制御性能が悪化する場合がある。そのような場合には、(2−1)、(2−2)と同様に目標進行方向速度Vdを小さくするのが好ましい。このことは、単位時間当たりの加工量が小さくて進行方向速度の影響を受けにくい、バフ掛けなどの研磨作業の場合に適用できる。
一方、単位時間当たりの切削量が大きい用途、例えばバリ取り作業などにおいては、目標進行方向速度Vdを小さくして押付時間が長くなると加工が過剰になる不具合が発生する。
従って、バリ取り作業などでは、以下の(2−3)、(2−4)のように目標進行方向速度Vdを大きくする。しかしながら、制御性能が著しく悪化する場合には、(1−1)、(1−2)のように目標進行方向速度Vdと目標押付力Fdとを変更するのが好ましい。
Vd={(k23−1)・(1−exp(−l23・t))+1}・Vx (9)
ただし、0<l23、0<t、1≦k23、0<ht<|h|
ここで、k23は定数であり、l23は定数である。
β1=(k24−1)・(1−exp{−l24・(|h|−ht)})+1 (10)
ただし、0<l24、1≦k24、0<ht<|h|
Vd=β1・Vs (11)
ここで、k24は定数であり、l24は定数である。なお、目標進行方向速度を変化させる場合には、ロボットアームの動きに過大な負荷がかからないように、滑らかに変化させるのが好ましい。
以下のように、目標押付力Fdを調節することにより、加工が不十分または過剰になるのを防止する。
・慣性力の押付方向成分の大きさ|h|が閾値htより小さい場合には、目標押付力Fdはその設定値Fsを使用する。
・慣性力の押付方向成分の大きさ|h|が閾値htより大きく、かつ、慣性力の押付方向成分の作用する方向と押付方向が逆向きである場合には、目標押付力Fdを大きくする。(3−1)、(3−2)
・慣性力の押付方向成分の大きさ|h|が閾値htより大きく、かつ、慣性力の押付方向成分の作用する方向と押付方向が同じ向きである場合には、目標押付力Fdを小さくする。(3−3)、(3−4)
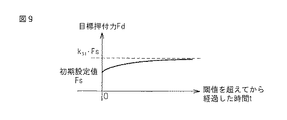
Fd={(k31−1)・(1−exp(−l31・t))+1}・Fs (12)
ただし、0<l31、0<t、1≦k31、0<ht<|h|
ここで、k31は定数であり、l31は定数である。
Fd=β1・Fs (13)
Fd={(1−k33)・exp(−l33・t)+k33}・Fs (14)
ただし、0<l33、0<t、0≦k33<1、0<ht<|h|
ここで、k33は定数であり、l33は定数である。
・慣性力の押付方向成分の大きさ|h|が閾値htより小さい場合には、目標軌道Tdはその設定値Tsを使用する。
・慣性力の押付方向成分の大きさ|h|が閾値htより大きい場合には、慣性力の押付方向成分の作用する方向と押付方向に応じて、以下のように目標軌道をずらす。
第一には、慣性力の押付方向成分の作用する方向と押付方向とが逆向きである場合には、押付方向に目標軌道をずらす。
第二には、慣性力の押付方向成分の作用する方向と押付方向とが同じ向きである場合には、押付方向とは逆向きに目標軌道をずらす。
Td=Ts+Tm
目標軌道の修正量Tmは以下の二通りで算出される。(4−1)、(4−2)
Tm=k41・(1−exp(−l41・t)) (15)
ただし、0<l41、0<t、0≦k41、0<ht<|h|
ここで、k41は定数であり、l41は定数である。
Tm=k42・(1−exp{−l42・(|h|−ht)}) (16)
ただし、0<l42、0≦k42、0<ht<|h|
ここで、k42は定数であり、l42は定数である。さらに、Tmは軌道修正量であり、hは慣性力の押付方向成分であり、htは動力学項と比較するための閾値である。これにより、ワークが加工不足または加工過剰になるのを防止できるのが分かるであろう。なお、目標軌道を変化させる場合には、ロボットアームの動きに過大な負荷がかからないように、滑らかに変化させるのが好ましい。
・慣性力の押付方向成分の大きさ|h|が閾値htより小さい場合には、力制御ゲインGdはその設定値Gsを使用する。
・慣性力の押付方向成分の大きさ|h|が閾値htより大きい場合には、力制御ゲインGdを大きくする(5−1)、(5−2)。
Gd={(k51−1)・(1−exp(−l51・t))+1}・Gs (17)
ただし、0<l51、0<t、1≦k51、0<ht<|h|
ここで、k51は定数であり、l51は定数である。
Gd=β1・Gs (18)
ここで、Gsは予め第一パラメータ格納部20に設定した力制御ゲインである。
また、上記(1)、(2)、(3)、(4)、(5)の場合において、目標進行方向速度Vd、目標押付力Fd、目標軌道修正量Tm、力制御ゲインGdを、慣性力の押付方向成分の大きさとその方向に応じて設定するようなテーブルを予め用意し、それを利用する方法をおこなってもよい。
11 指令演算部
12 指令調整手段
13 動力学項、重力算出部
14 力補正手段
20 第一パラメータ格納部
25 第二パラメータ格納部
26 重心位置
50、50’ ロボット
50a ロボットアーム
51 力覚センサ(力測定手段)
52 作業ツール
53 位置・速度・加速度検出部
54 ハンド
60 ワーク
61 作業台
62 表面
63 ワーク表面において、慣性力の押付方向成分の作用する方向と押付方向が逆向きである領域
64 ワーク表面において、慣性力の押付方向成分の作用する方向と押付方向が同じ向きである領域
Td 目標軌道
Ts 目標軌道の設定値
Tm 軌道修正量
Fd 目標押付力
Fs 目標押付力の設定値
G(θ) 重力ベクトル
Gd 力制御ゲイン
Gs 力制御ゲインの設定値
C(θ,dθ/dt) 遠心力やコリオリ力などを表すベクトル
h 慣性力の押付方向成分
ht 閾値
t 閾値を超えてからの経過時間
Vd 目標進行方向速度
Vs 目標進行方向速度の設定値
α1、α2、β1 係数
Claims (11)
- ロボットアームの先端に取付けられた作業ツールとワークとの間に作用する力を制御するロボット制御装置において、
前記制御をおこなう際に必要な力データを取得する力測定手段と、
前記作業ツールから前記力測定手段に及ぼされる力のうち、重力が前記力測定手段に作用する力と前記ロボットアームの運動により発生する動力学項とを算出する算出手段と、
前記算出手段により算出された、前記重力が前記力測定手段に作用する力と前記動力学項とを用いて、前記力測定手段により測定された力を補正する補正手段と、
前記動力学項が所定の閾値より大きい場合には、前記動力学項および前記重力により前記力測定手段に及ぼされる力に応じて、前記ロボットアームの動作指令を調整する指令調整手段と、を具備するロボット制御装置。 - ロボットアームの先端に取付けられたハンドにより把持されたワークと固定された作業ツールとの間に作用する力を制御するロボット制御装置において、
前記制御をおこなう際に必要な力データを取得する力測定手段と、
前記ワークを把持した前記ハンドから前記力測定手段に及ぼされる力のうち、重力が前記力測定手段に作用する力と前記ロボットアームの運動により発生する動力学項とを算出する算出手段と、
前記算出手段により算出された、前記重力が前記力測定手段に作用する力と前記動力学項とを用いて、前記力測定手段により測定された力を補正する補正手段と、
前記動力学項が所定の閾値より大きい場合には、前記動力学項および前記重力により前記力測定手段に及ぼされる力に応じて、前記ロボットアームの動作指令を調整する指令調整手段と、を具備するロボット制御装置。 - 前記指令調整手段により調整される前記ロボットアームの前記動作指令は、前記作業ツールと前記ワークとの間に作用すべき力の指令を含む請求項1または2に記載のロボット制御装置。
- 前記指令調整手段により調整される前記ロボットアームの前記動作指令は、前記ロボットアームの進行方向速度を含む請求項1から3のいずれか一項に記載のロボット制御装置。
- 前記指令調整手段により調整される前記ロボットアームの前記動作指令は、ロボットアームの目標軌道を含む請求項1から4のいずれか一項に記載のロボット制御装置。
- 前記指令調整手段により調整される前記ロボットアームの前記動作指令は、力制御のゲインを含む請求項1から5のいずれか一項に記載のロボット制御装置。
- 前記算出手段は、前記ロボットアームの姿勢、動作速度や動作加速度と、前記ロボットアーム先端部に取付けられたエンドエフェクタ部の質量と重心から、動力学項と重力とを算出する請求項1から6のいずれか一項に記載のロボット制御装置。
- 前記力測定手段は力覚センサである、請求項1から7のいずれか一項に記載のロボット制御装置。
- 前記力測定手段は前記ロボットアームを駆動するアクチュエータの電流値に基づいて力を推定する請求項1から7のいずれか一項に記載のロボット制御装置。
- 前記ロボット制御装置により行われる力制御はインピーダンス制御である請求項1から9のいずれか一項に記載のロボット制御装置。
- 前記ロボット制御装置により行われる力制御はダンピング制御である請求項1から9のいずれか一項に記載のロボット制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006330900A JP4267027B2 (ja) | 2006-12-07 | 2006-12-07 | ロボット制御装置 |
| EP07023557A EP1930131A3 (en) | 2006-12-07 | 2007-12-05 | Robot control apparatus for force control |
| US11/951,457 US20080140257A1 (en) | 2006-12-07 | 2007-12-06 | Robot control apparatus for force control |
| CN200710186555XA CN101195221B (zh) | 2006-12-07 | 2007-12-07 | 进行力控制的机器人控制装置 |
| US13/169,731 US20110257787A1 (en) | 2006-12-07 | 2011-06-27 | Robot control apparatus for force control |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006330900A JP4267027B2 (ja) | 2006-12-07 | 2006-12-07 | ロボット制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008142810A JP2008142810A (ja) | 2008-06-26 |
| JP4267027B2 true JP4267027B2 (ja) | 2009-05-27 |
Family
ID=39166379
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006330900A Active JP4267027B2 (ja) | 2006-12-07 | 2006-12-07 | ロボット制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US20080140257A1 (ja) |
| EP (1) | EP1930131A3 (ja) |
| JP (1) | JP4267027B2 (ja) |
| CN (1) | CN101195221B (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9149930B2 (en) | 2012-07-20 | 2015-10-06 | Seiko Epson Corporation | Control system, program, and method of controlling mechanical equipment |
| JP2015202535A (ja) * | 2014-04-14 | 2015-11-16 | ファナック株式会社 | 作用された力に応じて移動されるロボットを制御するロボット制御装置 |
| JP2015202536A (ja) * | 2014-04-14 | 2015-11-16 | ファナック株式会社 | 作用された力に応じて移動されるロボットを制御するロボット制御装置 |
| DE102016008060B4 (de) | 2015-07-09 | 2018-05-09 | Fanuc Corporation | Robotersteuereinheit für einen Roboter, der zwei Gegenstände in einen kombinierten Zustand versetzt |
| US10434647B2 (en) | 2016-11-25 | 2019-10-08 | Kabushiki Kaisha Toshiba | Robot control device, a robot control method, and a picking device |
Families Citing this family (87)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE530700C2 (sv) * | 2006-12-21 | 2008-08-19 | Hexagon Metrology Ab | Förfarande och anordning för kompensering av geometriska fel i bearbetningsmaskiner |
| US8060250B2 (en) * | 2008-12-15 | 2011-11-15 | GM Global Technology Operations LLC | Joint-space impedance control for tendon-driven manipulators |
| US8170718B2 (en) * | 2008-12-18 | 2012-05-01 | GM Global Technology Operations LLC | Multiple priority operational space impedance control |
| JP2010234520A (ja) * | 2009-03-10 | 2010-10-21 | Canon Inc | 研磨装置 |
| JP4957753B2 (ja) * | 2009-06-15 | 2012-06-20 | セイコーエプソン株式会社 | ロボット、搬送装置、及び慣性センサーを用いた制御方法 |
| JP5236596B2 (ja) * | 2009-08-19 | 2013-07-17 | ファナック株式会社 | 加工ロボットシステム |
| US8525460B2 (en) * | 2010-02-02 | 2013-09-03 | GM Global Technology Operations LLC | Architecture for robust force and impedance control of series elastic actuators |
| JP5645564B2 (ja) * | 2010-09-14 | 2014-12-24 | キヤノン株式会社 | センサ装置及びロボット装置 |
| JP5215378B2 (ja) * | 2010-12-27 | 2013-06-19 | ファナック株式会社 | 3軸力センサを用いて力制御をおこなうロボットの制御装置 |
| US8528955B2 (en) * | 2011-01-24 | 2013-09-10 | AMF automation Technologies, LLC | Robot end effector with cable management |
| JP5149416B2 (ja) * | 2011-04-06 | 2013-02-20 | ファナック株式会社 | ロボットの異常検出機能を有するロボットシステム及びその制御方法 |
| JP2012232370A (ja) * | 2011-04-28 | 2012-11-29 | Seiko Epson Corp | ロボットコントローラー、簡易設置型ロボット、及び簡易設置型ロボットの制御方法 |
| US9566710B2 (en) | 2011-06-02 | 2017-02-14 | Brain Corporation | Apparatus and methods for operating robotic devices using selective state space training |
| JP5907678B2 (ja) * | 2011-07-20 | 2016-04-26 | オリンパス株式会社 | 医療用動作機構およびマニピュレータ |
| JP5399593B2 (ja) * | 2011-11-10 | 2014-01-29 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| JP5966372B2 (ja) | 2012-01-17 | 2016-08-10 | セイコーエプソン株式会社 | ロボット制御装置、ロボットシステム、ロボット制御方法及びロボット |
| JP5962020B2 (ja) | 2012-01-17 | 2016-08-03 | セイコーエプソン株式会社 | ロボット制御装置、ロボットシステム、ロボット及びロボット制御方法 |
| JP5895628B2 (ja) * | 2012-03-15 | 2016-03-30 | 株式会社ジェイテクト | ロボットの制御方法及びロボット制御装置、並びにロボット制御システム |
| JP6083145B2 (ja) * | 2012-07-31 | 2017-02-22 | セイコーエプソン株式会社 | ロボットの制御装置、およびロボット |
| US9764468B2 (en) | 2013-03-15 | 2017-09-19 | Brain Corporation | Adaptive predictor apparatus and methods |
| CA2902213C (en) * | 2013-03-15 | 2021-05-18 | John Alberti | Force responsive power tool |
| US9242372B2 (en) | 2013-05-31 | 2016-01-26 | Brain Corporation | Adaptive robotic interface apparatus and methods |
| US9314924B1 (en) | 2013-06-14 | 2016-04-19 | Brain Corporation | Predictive robotic controller apparatus and methods |
| US9792546B2 (en) | 2013-06-14 | 2017-10-17 | Brain Corporation | Hierarchical robotic controller apparatus and methods |
| US9384443B2 (en) | 2013-06-14 | 2016-07-05 | Brain Corporation | Robotic training apparatus and methods |
| JP5845212B2 (ja) * | 2013-06-28 | 2016-01-20 | ファナック株式会社 | 視覚センサ及び力センサを備えたバリ取り装置 |
| US9579789B2 (en) | 2013-09-27 | 2017-02-28 | Brain Corporation | Apparatus and methods for training of robotic control arbitration |
| JP6248544B2 (ja) * | 2013-10-30 | 2017-12-20 | セイコーエプソン株式会社 | ロボット、制御装置、ロボットシステム |
| JP6307838B2 (ja) * | 2013-11-01 | 2018-04-11 | セイコーエプソン株式会社 | ロボット、ロボットシステムおよび制御装置 |
| US9463571B2 (en) | 2013-11-01 | 2016-10-11 | Brian Corporation | Apparatus and methods for online training of robots |
| CN104608113B (zh) | 2013-11-01 | 2018-07-17 | 精工爱普生株式会社 | 机器人、机器人系统以及机器人控制装置 |
| US9597797B2 (en) | 2013-11-01 | 2017-03-21 | Brain Corporation | Apparatus and methods for haptic training of robots |
| US9358685B2 (en) * | 2014-02-03 | 2016-06-07 | Brain Corporation | Apparatus and methods for control of robot actions based on corrective user inputs |
| US9259844B2 (en) * | 2014-02-12 | 2016-02-16 | General Electric Company | Vision-guided electromagnetic robotic system |
| JP5877859B2 (ja) * | 2014-03-12 | 2016-03-08 | ファナック株式会社 | バラ積みされたワークを取り出すロボットシステム及びワークの把持状態を判定する判定方法 |
| JP5941083B2 (ja) * | 2014-03-12 | 2016-06-29 | ファナック株式会社 | 外部環境との接触を検知するロボット制御装置 |
| JP5893666B2 (ja) * | 2014-04-14 | 2016-03-23 | ファナック株式会社 | 力に応じて動かすロボットのロボット制御装置およびロボットシステム |
| JP5946859B2 (ja) | 2014-04-14 | 2016-07-06 | ファナック株式会社 | 力に応じて動かすロボットのロボット制御装置およびロボットシステム |
| US9346167B2 (en) | 2014-04-29 | 2016-05-24 | Brain Corporation | Trainable convolutional network apparatus and methods for operating a robotic vehicle |
| JP5972941B2 (ja) | 2014-08-06 | 2016-08-17 | ファナック株式会社 | 数値制御装置付き工作機械 |
| JP5927259B2 (ja) * | 2014-09-30 | 2016-06-01 | ファナック株式会社 | 力制御を実行するロボットシステム |
| US9630318B2 (en) | 2014-10-02 | 2017-04-25 | Brain Corporation | Feature detection apparatus and methods for training of robotic navigation |
| JP6310093B2 (ja) | 2014-11-12 | 2018-04-11 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 目標物体の検出方法、検出装置及びロボット |
| US9717387B1 (en) | 2015-02-26 | 2017-08-01 | Brain Corporation | Apparatus and methods for programming and training of robotic household appliances |
| DE102015206121B3 (de) * | 2015-04-07 | 2016-09-08 | Kuka Systems Gmbh | Verfahren zum Steuern von zumindest einem Manipulator unter Verwendung zumindest einer Kraftkompensationsvorrichtung |
| US9962833B2 (en) * | 2015-04-07 | 2018-05-08 | Mtm Robotics, Llc | System and method for adjusting end-effector actuation based on relative position with respect to gravitational force |
| CN106142081B (zh) | 2015-05-14 | 2021-03-02 | 发那科株式会社 | 对加工工具转速和工件进给速度进行调整的加工系统 |
| JP6407810B2 (ja) * | 2015-05-14 | 2018-10-17 | ファナック株式会社 | 加工ツール回転数とワーク送り速度とを調整する加工システム |
| CN106239516B (zh) * | 2015-06-03 | 2021-09-24 | 精工爱普生株式会社 | 机器人控制装置、机器人以及机器人系统 |
| JP6489991B2 (ja) * | 2015-10-02 | 2019-03-27 | ファナック株式会社 | ロボットを操作するハンドルを備えたロボット用操作装置 |
| US10471594B2 (en) * | 2015-12-01 | 2019-11-12 | Kindred Systems Inc. | Systems, devices, and methods for the distribution and collection of multimodal data associated with robots |
| CN108366835B (zh) * | 2015-12-10 | 2021-07-27 | 柯惠Lp公司 | 具有独立的侧倾、俯仰和偏摆缩放的机器人外科手术系统 |
| DE102017000063B4 (de) * | 2016-01-14 | 2019-10-31 | Fanuc Corporation | Robotereinrichtung mit Lernfunktion |
| JP6746990B2 (ja) * | 2016-03-18 | 2020-08-26 | セイコーエプソン株式会社 | ロボット制御装置及びロボットシステム |
| US10241514B2 (en) | 2016-05-11 | 2019-03-26 | Brain Corporation | Systems and methods for initializing a robot to autonomously travel a trained route |
| US9987752B2 (en) | 2016-06-10 | 2018-06-05 | Brain Corporation | Systems and methods for automatic detection of spills |
| US10282849B2 (en) | 2016-06-17 | 2019-05-07 | Brain Corporation | Systems and methods for predictive/reconstructive visual object tracker |
| US10016896B2 (en) | 2016-06-30 | 2018-07-10 | Brain Corporation | Systems and methods for robotic behavior around moving bodies |
| JPWO2018012110A1 (ja) | 2016-07-11 | 2019-04-25 | ソニー株式会社 | 処理装置、システム、および制御方法 |
| IT201600097482A1 (it) | 2016-09-28 | 2018-03-28 | Gaiotto Automation S P A | Metodo per il trattamento superficiale di un manufatto |
| US10493617B1 (en) * | 2016-10-21 | 2019-12-03 | X Development Llc | Robot control |
| US10274325B2 (en) | 2016-11-01 | 2019-04-30 | Brain Corporation | Systems and methods for robotic mapping |
| US10001780B2 (en) | 2016-11-02 | 2018-06-19 | Brain Corporation | Systems and methods for dynamic route planning in autonomous navigation |
| US10723018B2 (en) | 2016-11-28 | 2020-07-28 | Brain Corporation | Systems and methods for remote operating and/or monitoring of a robot |
| JP6714732B2 (ja) * | 2016-12-28 | 2020-06-24 | 株式会社Subaru | 機械加工用ロボット及び機械加工方法 |
| JP6400749B2 (ja) | 2017-01-24 | 2018-10-03 | ファナック株式会社 | 力制御押付装置を備えたロボットシステム |
| US10377040B2 (en) | 2017-02-02 | 2019-08-13 | Brain Corporation | Systems and methods for assisting a robotic apparatus |
| US10852730B2 (en) | 2017-02-08 | 2020-12-01 | Brain Corporation | Systems and methods for robotic mobile platforms |
| US10293485B2 (en) | 2017-03-30 | 2019-05-21 | Brain Corporation | Systems and methods for robotic path planning |
| CN109397072A (zh) * | 2017-08-18 | 2019-03-01 | 均豪精密工业股份有限公司 | 工件加工方法及加工系统 |
| WO2019098044A1 (ja) * | 2017-11-14 | 2019-05-23 | 三菱電機株式会社 | ロボットの動作調整装置、動作制御システム及びロボットシステム |
| US10967510B2 (en) * | 2017-11-16 | 2021-04-06 | Industrial Technology Research Institute | Robot arm processing system and method thereof |
| CN109794932B (zh) * | 2017-11-16 | 2021-03-16 | 财团法人工业技术研究院 | 机械手臂加工系统及其加工方法 |
| CN108107842A (zh) * | 2017-12-31 | 2018-06-01 | 芜湖哈特机器人产业技术研究院有限公司 | 基于力控制的机器人打磨轨迹估算方法 |
| US20200367984A1 (en) * | 2018-01-04 | 2020-11-26 | Covidien Lp | Robotic surgical systems including torque sensors |
| CN108284456A (zh) * | 2018-01-31 | 2018-07-17 | 哈尔滨工业大学 | 基于降维解析的传感器载荷外力测量中的重力补偿方法 |
| JP6950612B2 (ja) | 2018-03-30 | 2021-10-13 | オムロン株式会社 | センサ、情報処理装置、センサ制御方法、情報処理方法、プログラム、および記録媒体 |
| EP3859353A4 (en) * | 2018-09-26 | 2022-06-29 | IHI Corporation | Acceleration-deriving device and method |
| US10976728B2 (en) * | 2018-12-10 | 2021-04-13 | Raytheon Technologies Corporation | Automatic process planning for robotic deburring operations |
| US11796831B2 (en) | 2018-12-17 | 2023-10-24 | Semiconductor Components Industries, Llc | Methods and system for position stabilization |
| US20200301510A1 (en) * | 2019-03-19 | 2020-09-24 | Nvidia Corporation | Force estimation using deep learning |
| EP3981552B1 (en) * | 2019-06-04 | 2022-12-21 | Panasonic Intellectual Property Management Co., Ltd. | Robot control method |
| JP7283994B2 (ja) * | 2019-06-21 | 2023-05-30 | ファナック株式会社 | ロボットの制御装置およびプログラミング装置 |
| JP7415447B2 (ja) * | 2019-10-31 | 2024-01-17 | セイコーエプソン株式会社 | ロボットシステム |
| US20210268649A1 (en) * | 2020-02-28 | 2021-09-02 | Ati Industrial Automation, Inc. | Controlling Contact Force in a Machine Tool |
| US20240083028A1 (en) * | 2021-02-11 | 2024-03-14 | Abb Schweiz Ag | Method of Controlling Manipulator of Industrial Robot, Control System and Industrial Robot |
| CN113319855B (zh) * | 2021-06-28 | 2022-04-12 | 哈尔滨工业大学 | 一种多关节诊疗机器人柔顺力控制模式下的重力补偿方法 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01234141A (ja) * | 1988-03-16 | 1989-09-19 | Nitta Ind Corp | 工具の慣性による影響を除去する方法および装置 |
| JP2770982B2 (ja) * | 1989-05-25 | 1998-07-02 | 株式会社豊田中央研究所 | マニピユレータの位置と力の協調制御装置 |
| DE3922524A1 (de) * | 1989-07-08 | 1991-01-17 | Kuka Schweissanlagen & Roboter | Verfahren zur regelung der bewegungen einer achse an programmgesteuerten maschinen und regelsystem |
| JP2739764B2 (ja) * | 1989-12-15 | 1998-04-15 | 富士通株式会社 | ロボットの倣い速度制御方式 |
| KR940003204B1 (ko) * | 1990-02-27 | 1994-04-16 | 가부시끼가이샤 도시바 | 제어로봇 |
| JPH05143146A (ja) | 1991-09-30 | 1993-06-11 | Yamaha Corp | ロボツトの教示装置 |
| US5327790A (en) * | 1992-06-19 | 1994-07-12 | Massachusetts Institute Of Technology | Reaction sensing torque actuator |
| US5448146A (en) * | 1993-01-29 | 1995-09-05 | Board Of Regents, The University Of Texas System | Method for applying constant force with nonlinear feedback control and constant force device using same |
| JP3412236B2 (ja) * | 1993-03-31 | 2003-06-03 | 株式会社日立製作所 | 多自由度ロボット及びそのコンプライアンス制御方法 |
| US5497061A (en) * | 1993-03-31 | 1996-03-05 | Hitachi, Ltd. | Method of controlling robot's compliance |
| JP3402829B2 (ja) | 1995-03-17 | 2003-05-06 | 東芝機械株式会社 | 力制御ロボット |
| EP1418026A1 (en) * | 1995-09-11 | 2004-05-12 | Kabushiki Kaisha Yaskawa Denki | Control apparatus for robot |
| US5767648A (en) * | 1996-04-19 | 1998-06-16 | Massachusetts Institute Of Technology | Base force/torque sensor apparatus for the precise control of manipulators with joint friction and a method of use thereof |
| US6253120B1 (en) * | 1997-04-28 | 2001-06-26 | Seiko Seiki Kabushiki Kaisha | Position and/or force controlling apparatus using sliding mode decoupling control |
| DE19748822A1 (de) * | 1997-11-05 | 1999-05-06 | Kuka Roboter Gmbh | Roboterarm mit Gewichtsausgleich |
| US6565554B1 (en) * | 1999-04-07 | 2003-05-20 | Intuitive Surgical, Inc. | Friction compensation in a minimally invasive surgical apparatus |
| US6470225B1 (en) * | 1999-04-16 | 2002-10-22 | Siemens Energy & Automation, Inc. | Method and apparatus for automatically tuning feedforward parameters |
| JP2000301479A (ja) * | 1999-04-19 | 2000-10-31 | Denso Corp | ロボット制御装置 |
| US7118452B2 (en) * | 2004-02-12 | 2006-10-10 | The Boeing Company | Pneumatically actuated flexible coupling end effectors for lapping/polishing |
| US9110456B2 (en) * | 2004-09-08 | 2015-08-18 | Abb Research Ltd. | Robotic machining with a flexible manipulator |
| DE602007008206D1 (de) * | 2006-02-23 | 2010-09-16 | Abb Ab | System zur steuerung der position und orientierung eines objekts je nach von einem benutzer empfangenen kräften und drehmomenten |
| US20080065257A1 (en) * | 2006-09-13 | 2008-03-13 | Jianmin He | Controlled material removal rate (CMRR) and self-tuning force control in robotic machining process |
-
2006
- 2006-12-07 JP JP2006330900A patent/JP4267027B2/ja active Active
-
2007
- 2007-12-05 EP EP07023557A patent/EP1930131A3/en not_active Ceased
- 2007-12-06 US US11/951,457 patent/US20080140257A1/en not_active Abandoned
- 2007-12-07 CN CN200710186555XA patent/CN101195221B/zh active Active
-
2011
- 2011-06-27 US US13/169,731 patent/US20110257787A1/en not_active Abandoned
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9149930B2 (en) | 2012-07-20 | 2015-10-06 | Seiko Epson Corporation | Control system, program, and method of controlling mechanical equipment |
| JP2015202535A (ja) * | 2014-04-14 | 2015-11-16 | ファナック株式会社 | 作用された力に応じて移動されるロボットを制御するロボット制御装置 |
| JP2015202536A (ja) * | 2014-04-14 | 2015-11-16 | ファナック株式会社 | 作用された力に応じて移動されるロボットを制御するロボット制御装置 |
| US9555548B2 (en) | 2014-04-14 | 2017-01-31 | Fanuc Corporation | Robot control device for controlling robot moved according to applied force |
| US9623567B2 (en) | 2014-04-14 | 2017-04-18 | Fanuc Corporation | Robot control device for controlling robot moved according to applied force |
| DE102015004481B4 (de) | 2014-04-14 | 2018-12-06 | Fanuc Corporation | Robotersteuervorrichtung zum Steuern eines gemäß einer ausgeübten Kraft bewegten Roboters |
| DE102016008060B4 (de) | 2015-07-09 | 2018-05-09 | Fanuc Corporation | Robotersteuereinheit für einen Roboter, der zwei Gegenstände in einen kombinierten Zustand versetzt |
| US10434647B2 (en) | 2016-11-25 | 2019-10-08 | Kabushiki Kaisha Toshiba | Robot control device, a robot control method, and a picking device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101195221A (zh) | 2008-06-11 |
| CN101195221B (zh) | 2011-07-27 |
| US20110257787A1 (en) | 2011-10-20 |
| EP1930131A3 (en) | 2011-03-02 |
| US20080140257A1 (en) | 2008-06-12 |
| EP1930131A2 (en) | 2008-06-11 |
| JP2008142810A (ja) | 2008-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4267027B2 (ja) | ロボット制御装置 | |
| US9452532B2 (en) | Robot, device and method for controlling robot, and computer-readable non-transitory recording medium | |
| US8626341B2 (en) | Apparatus and method for adjusting parameter of impedance control | |
| JP5236596B2 (ja) | 加工ロボットシステム | |
| KR940003204B1 (ko) | 제어로봇 | |
| JP6582483B2 (ja) | ロボット制御装置およびロボットシステム | |
| EP2586577A1 (en) | Robot control device | |
| JP6044511B2 (ja) | ロボットの制御方法及びロボットシステム | |
| JP4997145B2 (ja) | パワーアシスト装置およびその制御方法 | |
| JP2007076807A (ja) | パワーアシスト装置とその適応モデル予測制御方法 | |
| JP5897645B2 (ja) | 機械先端点のたわみを低減するサーボ制御装置 | |
| JP2016190292A (ja) | ロボット制御装置、ロボットシステムおよびロボット制御方法 | |
| US20150051735A1 (en) | Control apparatus of robot, robot, and program thereof | |
| CN112405566A (zh) | 机器人控制装置 | |
| JP4639417B2 (ja) | ロボットの制御装置 | |
| Lange et al. | Revised force control using a compliant sensor with a position controlled robot | |
| US9827673B2 (en) | Robot controller inhibiting shaking of tool tip in robot equipped with travel axis | |
| JP7068133B2 (ja) | 制御システム、制御方法、及び制御プログラム | |
| US10639799B2 (en) | Robot system | |
| JP3217351B2 (ja) | 力制御装置及びそれを用いたロボット | |
| JP2003216243A (ja) | ロボットの制御装置 | |
| JP2013255981A (ja) | ロボット制御装置および撓み補正方法 | |
| US11660742B2 (en) | Teaching method and robot system | |
| JP4222338B2 (ja) | 適応型ビジュアルフィードバック制御方法 | |
| JP6565622B2 (ja) | ロボットシステム及びロボット制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20080417 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080909 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20080908 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080916 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090203 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090217 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4267027 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120227 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120227 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130227 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140227 Year of fee payment: 5 |