JP6498140B2 - 作業ユニット及び作業装置 - Google Patents
作業ユニット及び作業装置 Download PDFInfo
- Publication number
- JP6498140B2 JP6498140B2 JP2016051348A JP2016051348A JP6498140B2 JP 6498140 B2 JP6498140 B2 JP 6498140B2 JP 2016051348 A JP2016051348 A JP 2016051348A JP 2016051348 A JP2016051348 A JP 2016051348A JP 6498140 B2 JP6498140 B2 JP 6498140B2
- Authority
- JP
- Japan
- Prior art keywords
- tool
- work
- axis
- rotating
- rotation mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
- B23P19/04—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes for assembling or disassembling parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/0009—Energy-transferring means or control lines for movable machine parts; Control panels or boxes; Control parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/01—Frames, beds, pillars or like members; Arrangement of ways
- B23Q1/012—Portals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/50—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism
- B23Q1/54—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only
- B23Q1/5406—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only a single rotating pair followed perpendicularly by a single rotating pair
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q5/00—Driving or feeding mechanisms; Control arrangements therefor
- B23Q5/02—Driving main working members
- B23Q5/04—Driving main working members rotary shafts, e.g. working-spindles
- B23Q5/10—Driving main working members rotary shafts, e.g. working-spindles driven essentially by electrical means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0258—Two-dimensional joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0258—Two-dimensional joints
- B25J17/0266—Two-dimensional joints comprising more than two actuating or connecting rods
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
- B25J19/0029—Means for supplying energy to the end effector arranged within the different robot elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/023—Cartesian coordinate type
- B25J9/026—Gantry-type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K37/00—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors
- H02K37/24—Structural association with auxiliary mechanical devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/50—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism
- B23Q1/54—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only
- B23Q1/545—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces
- B23Q1/5462—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only comprising spherical surfaces with one supplementary sliding pair
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T409/00—Gear cutting, milling, or planing
- Y10T409/30—Milling
- Y10T409/30784—Milling including means to adustably position cutter
- Y10T409/308512—Compound angular adjustment
Description
また、本発明は、作業空間内に配置されたワークに対して作業を行うツールが装着された作業ユニットにおいて、前記ツールを回転させるツール回転機構と、前記ツール回転機構を第1の軸周りに回動させる第1回動機構と、前記ツール回転機構及び前記第1回動機構を前記第1の軸と直交する第2の軸周りに回動させる第2回動機構と、を備え、前記第2回動機構は、前記第1回動機構を支持する回転台を備え、前記回転台は、アーム支持部を備え、前記第1回動機構は、前記第2回動機構に接続されるステータと、該ステータの内周側に前記第1の軸を中心軸として回転可能に配置された中空軸状のロータと、を有するモータと、前記ロータの一方端部に連結される一方アーム部および前記ロータの他方端部側において該他方端部から離間すると共に前記アーム支持部に回転可能に連結された他方アーム部と、前記一方アーム部及び他方アーム部を連結するアーム連結部と、を含む第2回転体と、を備え、前記ツール回転機構は、前記第2回転体に設けられることを特徴とする。
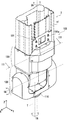
第2回動機構130は、第1回動機構120を支持する回転台131と、回転台131を第2の軸2A周りに回転させる第2回転駆動源132と、第2回転駆動源132を支持する支持体133とを備える。
第1回動機構120は、第2回動機構130に接続されるステータ121と、ステータ121の内側に設けられるロータ122とを備える。ステータ121は、第2回動機構130の回転台131に固定され、回転台131と一体に回転される。ステータ121は、図3においてその長手方向がX方向へ延びるように配置される筒状部材である。
再び図3及び図4を参照してツール回転機構110は、ロータ122に接続される第2回転体123に支持される本体部111と、本体部111に装着され、ツールTを回転させる回転体112と、回転体112に回転駆動力を伝達する駆動伝達部113とを備える。本体部111は、第2回転体123のツール支持アーム部123a2の下面に固定されている。また回転体112は、本体部111に相対回動可能に保持され、ツールの回転軸TA回りに回動可能である。回転体112は、駆動伝達部113の後述する回転駆動源113aから供給される回転駆動力により回転され、これにより、装着されたツールが回転される。また、回転体112は、不図示のツールTのツール装着部を備える。
図6は本実施形態の作業装置Aの制御を行う制御ユニット500のブロック図である。制御ユニット500は、処理部510と、記憶部520と、インターフェース部530とを備え、これらは互いに不図示のバスにより接続されている。処理部510は、記憶部520に記憶されたプログラムを実行する。処理部510は、例えばCPUである。記憶部520は、例えば、RAM、ROM、ハードディスク等である。インターフェース部530は、処理部510と、外部デバイス(ホストコンピュータ540、入力機器(例えば、センサ)550、出力機器(例えば、各駆動機構のアクチュエータ)560)との間に設けられ、例えば、通信インターフェースや、I/Oインターフェース等である。
Claims (10)
- 作業空間内に配置されたワークに対して作業を行うツールが装着された作業ユニットにおいて、
前記ツールを回転させるツール回転機構と、
前記ツール回転機構を第1の軸周りに回動させる第1回動機構と、
前記ツール回転機構及び前記第1回動機構を前記第1の軸と直交する第2の軸周りに回動させる第2回動機構と、
を備え、
前記第1回動機構は、
前記第2回動機構に接続されるステータと、該ステータの内周側に前記第1の軸を中心軸として回転可能に配置された中空軸状のロータと、を有するモータと、
前記ロータの一方端部に連結される一方アーム部および前記ロータの他方端部側において該他方端部に連結されない他方アーム部と、前記一方アーム部及び他方アーム部を連結するアーム連結部と、を含む第2回転体と、を備え、
前記ツール回転機構は、
前記第2回転体に設けられ、かつ、前記ロータに接続される本体部と、
前記本体部に装着され、前記ツールを回転させるツール回転体と、
該ツール回転体に回転駆動力を伝達する駆動伝達部と、を備え、
該駆動伝達部は、
前記回転駆動力を供給する回転駆動源と、
前記回転駆動源からの前記回転駆動力を前記ツール回転体へ伝達する伝達機構と、を備え、
前記回転駆動源は、その駆動回転軸が前記ツールの回転軸と平行に、かつ、前記ツールの回転軸の径方向にオフセットして設けられることを特徴とする作業ユニット。 - 作業空間内に配置されたワークに対して作業を行うツールが装着された作業ユニットにおいて、
前記ツールを回転させるツール回転機構と、
前記ツール回転機構を第1の軸周りに回動させる第1回動機構と、
前記ツール回転機構及び前記第1回動機構を前記第1の軸と直交する第2の軸周りに回動させる第2回動機構と、
を備え、
前記第2回動機構は、前記第1回動機構を支持する回転台を備え、
前記回転台は、アーム支持部を備え、
前記第1回動機構は、前記第2回動機構に接続されるステータと、該ステータの内周側に前記第1の軸を中心軸として回転可能に配置された中空軸状のロータと、を有するモータと、
前記ロータの一方端部に連結される一方アーム部および前記ロータの他方端部側において該他方端部から離間すると共に前記アーム支持部に回転可能に連結された他方アーム部と、前記一方アーム部及び他方アーム部を連結するアーム連結部と、を含む第2回転体と、を備え、
前記ツール回転機構は、前記第2回転体に設けられることを特徴とする作業ユニット。 - 前記ツールの回転軸の延長線が、前記第1回動機構の前記第1の軸と前記第2回動機構の前記第2の軸の延長線との交点を通ることを特徴とする請求項1に記載の作業ユニット。
- 前記伝達機構は、ベルト伝達機構であることを特徴とする請求項1又は3に記載の作業ユニット。
- 前記一方アーム部は、前記ツール回転機構に接続された配線が、前記ロータの中空部分を通って配線可能な連通部を備えることを特徴とする請求項2に記載の作業ユニット。
- 前記第2回動機構は、
前記回転台を前記第2の軸周りに回転させる第2回転駆動源と、
前記第2回転駆動源を支持する支持体と、
を備えることを特徴とする請求項5に記載の作業ユニット。 - 前記第2回動機構は、前記配線が前記支持体から前記第2回転駆動源の外周側を通って前記回転台に配線され、収容される収容部を備えたことを特徴とする請求項6に記載の作業ユニット。
- 請求項1から7のいずれか一項に記載の作業ユニットと、
前記作業ユニットを前記作業空間内に設定された所定の平面内で移動させる平面移動機構と、
前記作業ユニットを前記作業空間内に設定された前記所定の平面と直交する垂直面内で移動させる垂直移動機構と、
を備えたことを特徴とする作業装置。 - 前記作業空間内に配置され、前記ワークを載置保持する載置ユニットを更に備えたことを特徴とする請求項8に記載の作業装置。
- 前記平面移動機構は、前記垂直移動機構の移動をガイドする平面ガイド部を含み、
前記作業装置は、前記作業ユニットを前記作業空間内で移動可能に前記平面ガイド部を支持する支柱部を更に備えることを特徴とする請求項9に記載の作業装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016051348A JP6498140B2 (ja) | 2016-03-15 | 2016-03-15 | 作業ユニット及び作業装置 |
| EP17766428.1A EP3409430B1 (en) | 2016-03-15 | 2017-03-06 | Working unit and working device |
| CN201780016993.3A CN108883537B (zh) | 2016-03-15 | 2017-03-06 | 作业单元及作业装置 |
| EP19200997.5A EP3610995B1 (en) | 2016-03-15 | 2017-03-06 | Working unit and working device |
| PCT/JP2017/008753 WO2017159426A1 (ja) | 2016-03-15 | 2017-03-06 | 作業ユニット及び作業装置 |
| US16/127,323 US11173596B2 (en) | 2016-03-15 | 2018-09-11 | Working unit and working device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016051348A JP6498140B2 (ja) | 2016-03-15 | 2016-03-15 | 作業ユニット及び作業装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017164842A JP2017164842A (ja) | 2017-09-21 |
| JP2017164842A5 JP2017164842A5 (ja) | 2018-03-01 |
| JP6498140B2 true JP6498140B2 (ja) | 2019-04-10 |
Family
ID=59850690
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016051348A Active JP6498140B2 (ja) | 2016-03-15 | 2016-03-15 | 作業ユニット及び作業装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11173596B2 (ja) |
| EP (2) | EP3610995B1 (ja) |
| JP (1) | JP6498140B2 (ja) |
| CN (1) | CN108883537B (ja) |
| WO (1) | WO2017159426A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017131969A (ja) * | 2016-01-25 | 2017-08-03 | セイコーエプソン株式会社 | ロボット |
| CN111941399A (zh) * | 2020-08-19 | 2020-11-17 | 连城凯克斯科技有限公司 | 双z轴机构 |
| CN114161172A (zh) * | 2021-11-26 | 2022-03-11 | 广东欧亚特机械设备有限公司 | 五轴主轴头及加工中心 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59175965A (ja) | 1983-03-18 | 1984-10-05 | 松下電器産業株式会社 | ロボツト装置 |
| JPS59175964A (ja) | 1983-03-18 | 1984-10-05 | 松下電器産業株式会社 | ロボツト装置 |
| JPS59175964U (ja) | 1983-05-11 | 1984-11-24 | ダイキン工業株式会社 | 冷暖房装置 |
| JPS59175965U (ja) | 1983-05-12 | 1984-11-24 | 松下電器産業株式会社 | 一体形冷暖房空気調和機 |
| US5155423A (en) * | 1986-02-18 | 1992-10-13 | Robotics Research Corporation | Industrial robot with servo |
| JPS62287991A (ja) * | 1986-06-09 | 1987-12-14 | ファナック株式会社 | 産業用ロボツトの手首駆動機構 |
| JPH01234191A (ja) * | 1988-03-10 | 1989-09-19 | Internatl Business Mach Corp <Ibm> | マニピユレータ・アセンブリ |
| IT1245433B (it) * | 1991-03-04 | 1994-09-20 | Comau Spa | Polso di robot industriale |
| JP3095032B2 (ja) | 1991-10-09 | 2000-10-03 | ヤマハ発動機株式会社 | 工作用ロボットハンド |
| JPH07124887A (ja) * | 1993-10-29 | 1995-05-16 | Fanuc Ltd | 産業用ロボットのケーブル処理装置 |
| JP3069941B2 (ja) * | 1994-05-30 | 2000-07-24 | 本田技研工業株式会社 | ロボットの手首部における給電装置 |
| JPH0819985A (ja) * | 1994-07-04 | 1996-01-23 | Mitsubishi Electric Corp | ロボット装置 |
| JP2626623B2 (ja) * | 1995-04-12 | 1997-07-02 | 日本電気株式会社 | 回転機構 |
| US5584621A (en) * | 1995-06-13 | 1996-12-17 | Bertsche Engineering Corp. | Direct drive multiple axes rotary spindle head for milling machine |
| JPH09141593A (ja) * | 1995-11-17 | 1997-06-03 | Yaskawa Electric Corp | 産業用ロボット |
| JPH11207684A (ja) * | 1998-01-21 | 1999-08-03 | Kokusai Electric Co Ltd | 2軸回転駆動装置 |
| DE20204365U1 (de) * | 2002-03-19 | 2002-05-29 | Deckel Maho Pfronten Gmbh | Spindelkopf für eine Universal-Fräsmaschine |
| DE102005006221A1 (de) * | 2005-02-10 | 2006-08-17 | Benz Gmbh Werkzeug- U. Maschinenbau Kg | Antreibbare Werkzeughaltevorrichtung |
| JP2007229874A (ja) * | 2006-03-01 | 2007-09-13 | Kawasaki Heavy Ind Ltd | 産業用ロボット |
| JP4996393B2 (ja) * | 2006-09-14 | 2012-08-08 | 津田駒工業株式会社 | 工作機械用の加工用ヘッド |
| DE102006054475A1 (de) * | 2006-11-18 | 2008-05-21 | Hs-Beteiligungsgesellschaft Mbh | Getriebeloser, direkt angetriebener Mehrachsendrehkopf |
| US7293340B1 (en) * | 2006-12-15 | 2007-11-13 | Roundtop Machinery Industries Co., Ltd | Direct drive spindle, machining center and methods of fabricating the same |
| JP5207272B2 (ja) * | 2007-10-11 | 2013-06-12 | 明 杉山 | 工作機械用スピンドルヘッド |
| DE502007000514D1 (de) * | 2007-10-24 | 2009-04-23 | Wenzel Praez Gmbh | Mehrachsen-Drehkopf mit integrierter Steuereinrichtung und Koordinatenmessmaschine mit solch einem Mehrachsen-Drehkopf |
| JP5246847B2 (ja) * | 2008-02-08 | 2013-07-24 | 津田駒工業株式会社 | 工作機械用スピンドルヘッド |
| JP5353500B2 (ja) * | 2009-07-08 | 2013-11-27 | 株式会社安川電機 | ロボット |
| CN101767285B (zh) * | 2010-01-13 | 2011-06-08 | 济南二机床集团有限公司 | 机械主轴式ac双摆角数控铣头 |
| CN102233585A (zh) * | 2010-04-29 | 2011-11-09 | 鸿富锦精密工业(深圳)有限公司 | 机器人臂部件 |
| TWI417165B (zh) * | 2010-07-20 | 2013-12-01 | Ind Tech Res Inst | 工作機械之旋轉主軸頭 |
| CN102452080A (zh) * | 2010-10-27 | 2012-05-16 | 鸿富锦精密工业(深圳)有限公司 | 机器人臂部件 |
| US9475199B2 (en) * | 2012-06-05 | 2016-10-25 | TRACLabs, Inc. | Apparatus, systems, and methods for reconfigurable robotic manipulator and coupling |
| JP6186970B2 (ja) * | 2012-10-30 | 2017-08-30 | 株式会社ジェイテクト | 搬送装置 |
| TWI516335B (zh) * | 2013-11-05 | 2016-01-11 | 財團法人工業技術研究院 | 雙旋轉驅動裝置 |
| JP6500328B2 (ja) * | 2014-02-06 | 2019-04-17 | 日産自動車株式会社 | 組み立て装置 |
-
2016
- 2016-03-15 JP JP2016051348A patent/JP6498140B2/ja active Active
-
2017
- 2017-03-06 EP EP19200997.5A patent/EP3610995B1/en active Active
- 2017-03-06 WO PCT/JP2017/008753 patent/WO2017159426A1/ja active Application Filing
- 2017-03-06 EP EP17766428.1A patent/EP3409430B1/en active Active
- 2017-03-06 CN CN201780016993.3A patent/CN108883537B/zh active Active
-
2018
- 2018-09-11 US US16/127,323 patent/US11173596B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN108883537B (zh) | 2021-09-21 |
| EP3409430B1 (en) | 2021-05-12 |
| JP2017164842A (ja) | 2017-09-21 |
| WO2017159426A1 (ja) | 2017-09-21 |
| CN108883537A (zh) | 2018-11-23 |
| EP3409430A4 (en) | 2019-03-20 |
| US20190001485A1 (en) | 2019-01-03 |
| EP3610995A1 (en) | 2020-02-19 |
| EP3610995B1 (en) | 2021-02-24 |
| US11173596B2 (en) | 2021-11-16 |
| EP3409430A1 (en) | 2018-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6774343B2 (ja) | 工作機械 | |
| JP6450401B2 (ja) | 双腕ロボット | |
| JP6498140B2 (ja) | 作業ユニット及び作業装置 | |
| KR20130129852A (ko) | 핸드 기본 하우징 안에 연장된 드라이브들을 가진 산업용 로봇 | |
| JP6506324B2 (ja) | 水平多関節型ロボットとその設置反転方法 | |
| KR101207727B1 (ko) | 공작 기계 | |
| CN107791083A (zh) | 用于机床的机器人和机床 | |
| JP2018140456A (ja) | スカラロボット | |
| JP2018069354A (ja) | リンク式多関節ロボット | |
| JP6563607B2 (ja) | ロボット | |
| JP2017164842A5 (ja) | ||
| JP5368192B2 (ja) | 旋回型回転工具ヘッドのケーブル接続構造 | |
| JP5889767B2 (ja) | 工具保持装置 | |
| JP2019527626A (ja) | Cnc機械加工装置 | |
| JP6870092B2 (ja) | エンドエフェクタ | |
| JP7253238B2 (ja) | バリ除去装置 | |
| JP6852880B2 (ja) | スカラロボット | |
| JP3882814B2 (ja) | ロボット | |
| JP6910077B2 (ja) | バリ除去装置 | |
| KR102646290B1 (ko) | 3축 공작기계의 5축 가공을 위한 테이블 착탈 조립체 | |
| JP2023105931A (ja) | ロボット | |
| JP2024505163A (ja) | 機械部品を機械加工するためのアセンブリ、装置及び方法 | |
| JP2023101100A (ja) | ロボット | |
| JP2024045419A (ja) | ロボット | |
| JP2018134705A (ja) | ロボット、及びモーター |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180118 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181019 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190301 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6498140 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |