JP6491903B2 - 基板洗浄装置および方法 - Google Patents
基板洗浄装置および方法 Download PDFInfo
- Publication number
- JP6491903B2 JP6491903B2 JP2015030489A JP2015030489A JP6491903B2 JP 6491903 B2 JP6491903 B2 JP 6491903B2 JP 2015030489 A JP2015030489 A JP 2015030489A JP 2015030489 A JP2015030489 A JP 2015030489A JP 6491903 B2 JP6491903 B2 JP 6491903B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- roller
- cleaning
- slip
- rotating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 title claims description 232
- 238000004140 cleaning Methods 0.000 title claims description 97
- 238000000034 method Methods 0.000 title claims description 23
- 238000003825 pressing Methods 0.000 claims description 51
- 230000002093 peripheral effect Effects 0.000 claims description 28
- 230000003287 optical effect Effects 0.000 claims description 17
- 238000001514 detection method Methods 0.000 claims description 11
- 239000007788 liquid Substances 0.000 claims description 11
- 238000012544 monitoring process Methods 0.000 claims description 5
- 239000004065 semiconductor Substances 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000005755 formation reaction Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images




Description
本発明によれば、基板とローラとの間のスリップを検知した際に、基板へのローラの押し付け力(クランプ力)を増加させることにより、基板とローラとの間のスリップを解消することができる。したがって、基板の回転速度を直ちに設定回転速度に復帰させることができる。
本発明の好ましい態様によれば、前記スリップ検知手段は、基板の周縁部にあるノッチを検出可能な光センサからなることを特徴とする。
本発明の好ましい態様によれば、前記スリップ検知手段は、基板の周縁部に接触して回転する従動ローラと、従動ローラの回転速度を測定する速度センサからなることを特徴とする。
本発明の好ましい態様によれば、前記ローラ押し付け機構は、エアシリンダまたは電動シリンダからなることを特徴とする。
本発明によれば、スリップ検知手段の信号が所定の閾値より低下したときに、基板とローラとの間にスリップが発生したと判定し、基板へのローラの押し付け力(クランプ力)を増加させる。これにより、スリップを解消することができる。
本発明によれば、基板とローラとの間のスリップを検知した際に、基板へのローラの押し付け力(クランプ力)を増加させることにより、基板とローラとの間のスリップを解消することができる。したがって、基板の回転速度を直ちに設定回転速度に復帰させることができる。
本発明の好ましい態様は、基板の周縁部にあるノッチを検出可能な光センサによって基板の回転を監視することで、前記スリップを検知することを特徴とする。
本発明の好ましい態様は、基板の周縁部に接触して回転する従動ローラの回転を速度センサによって監視することで、前記スリップを検知することを特徴とする。
本発明の実施形態によれば、前記ローラの押し付け力を次第に大きくしていき、基板の回転が始まるときの前記ローラの押し付け力を求める。
本発明の実施形態によれば、前記ローラの押し付け力を次第に小さくしていき、基板とローラとの間のスリップが始まるときの前記ローラの押し付け力を求める。
本発明の基板洗浄装置の実施形態によれば、基板の周縁部を保持し基板を回転させる複数のローラと、基板の表面に洗浄液を供給する洗浄液供給ノズルと、前記複数のローラにより回転される基板の表面に接触して基板表面を洗浄する洗浄部材と、基板に対する前記複数のローラの押しつけ力を制御するコントローラと、受光部と投光部とからなる光センサとを備え、前記光センサは、回転している基板のノッチを検出可能な位置に光軸が設けられ、基板のノッチが前記光軸を通過するときに前記受光部が前記投光部からの光を受光し、電気的信号を生成して前記コントローラに該電気的信号を出力する。
(1)洗浄中に、散発的に生じる基板とローラとの間のスリップを検知したときに、その場でローラの押し付け力(クランプ力)を強め、基板とローラとの間のスリップを解消し、洗浄を継続することで、洗浄性能を維持することができる。
(2)処理条件に応じて頻繁に手動でローラの押し付け力(クランプ力)を調整するといった作業が必要でないため、ダウンタイムを削減できる。
(3)基板とローラとの間のスリップが発生しない限り、標準のローラの押付け力で処理するため、押し付け力を増加させたまま処理を継続してローラの摩耗が進行するという問題を解消することができる。
(4)装置のセッティング時あるいは基板の洗浄処理の開始前などに、基板の回転状態を監視しながら基板に対するローラの押し付け力(クランプ力)を調整することができる。したがって、基板を設定回転速度で回転させるためのクランプ力を最適化できる。
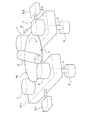
図1は、本説明に係る基板洗浄装置の全体構成を示す模式的斜視図である。図1に示すように、基板洗浄装置1は、半導体ウェハ等の基板Wの周縁部を保持し基板Wをその軸心の周りに回転させる複数のローラ1と、ローラ1により回転される基板Wの表面に接触する洗浄部材2とを備えている。図示例では、4個のローラ1が設置されており、各ローラ1はスピンドル3に連結されている。4個のローラ1のうち、例えば、2個のローラ1はスピンドル3を介してモータ4に連結されていて回転駆動されるようになっており、基板Wに回転力を与え、他の2個のローラ1は基板Wの回転を支承するベアリングの働きをしている。なお、全てのローラ1をモータに連結して、全てのローラ1が基板Wに回転力を付与するように構成してもよい。
第1ステージ5−1と第2ステージ5−2とがそれぞれ第1エアシリンダ6−1と第2エアシリンダ6−2によって離間する方向に移動した状態で、基板Wが供給されると、第1エアシリンダ6−1と第2エアシリンダ6−2が作動して第1ステージ5−1と第2ステージ5−2とが前進し、基板Wの周縁部は4つのローラ1により保持される。すなわち、図1に示すように、基板Wは4つのローラ1により水平に保持された状態になる。この状態でモータ4を駆動してローラ1を回転駆動し、基板Wに回転力を付与し、モータ4に連結されていないローラ1によって基板Wの回転を支承する。
基板Wが回転している間、基板Wの周縁部にはノッチ(V字型の切れ込み)nが形成されているため、ノッチnがローラ1に当たると、ローラ1が振動する。ローラ1の振動に伴い、ローラ1を支持している第1ステージ5−1と第2ステージ5−2とが振動する。この振動は、第2ステージ5−2に設置された加速度センサからなる振動センサ8によって検出することができる。
図2は、基板Wのスリップを検知してローラ1の押し付け力を制御する構成を備えた基板洗浄装置を示す模式図である。図2に示すように、第2ステージ5−2に設置された振動センサ8はコントローラ(制御部)10に接続されている。第2ステージ5−2を前後進させる第2エアシリンダ6−2は電空レギュレータ11に接続されており、電空レギュレータ11はコントローラ(制御部)10に接続されている。図2においてローラ1、第1ステージ5−1、第2ステージ5−2、第1エアシリンダ6−1および第2エアシリンダ6−2の構成は、図1に示すとおりである。
図4に示す実施形態では、基板Wの周縁部に形成されたノッチnを検出する光センサ20が設置されている。光センサ20は、光を投光する投光部21と、投光部21からの光を受光する受光部22とから構成されている。投受光部21,22は保持部23により保持されている。また、投受光部21,22はコントローラ(制御部)10に接続されている。
図5に示す実施形態では、基板Wの周縁部に接触して回転する従動ローラ30が設置されている。従動ローラ30には、従動ローラ30と一体に回転するスピンドル31が固定されており、スピンドル31の下端部を囲むように回転速度センサ32が設置されている。図5に示す実施形態では、従動ローラ30を基板Wの周縁部に接触させ、基板Wの回転を利用して従動ローラ30を回転させ、従動ローラ30の回転速度を回転速度センサ32で測定するようにしている。回転速度センサ32はコントローラ(制御部)10に接続されている。コントローラ10は、回転速度センサ32からの信号に基づいて基板Wの回転速度が設定回転速度より低下したことを検知して基板Wのスリップが発生したと判定し、電空レギュレータ11(図2参照)に圧力制御信号を送信する。電空レギュレータ11は、コントローラ10から送信された圧力制御信号に基づいて上昇させたクランプエアー圧を第2エアシリンダ6−2(図2参照)に供給し、基板Wに対するローラ1の押し付け力(クランプ力)を増加させる。その後、回転速度センサ32により基板Wの回転速度の監視を引き続き行い、基板Wの回転速度が設定回転速度に回復したら、基板Wへのローラ1の押し付け力(クランプ力)を標準設定値に戻す。
図1において、洗浄部材2が基板Wに接触していない状態においてローラ1の押し付け力(クランプ力)を次第に強めて基板Wの回転が始まるクランプ力を求め、この基板Wの回転が始まるクランプ力を基にして基板を設定回転速度で回転させるためのクランプ力を最適化することができる。この場合、基板Wの回転開始は、振動センサ8、光センサ20、回転速度センサ32により検知可能であり、クランプ力はコントローラ(制御部)10により演算することができる。
これまで本発明の実施形態について説明したが、本発明は上述の実施形態に限定されず、その技術思想の範囲内において、種々の異なる形態で実施されてよいことは勿論である。
2 洗浄部材
3 スピンドル
4 モータ
5−1 第1ステージ
5−2 第2ステージ
6−1 第1エアシリンダ
6−2 第2エアシリンダ
8 振動センサ
10 コントローラ(制御部)
11 電空レギュレータ
20 光センサ
21 投光部
22 受光部
23 保持部
30 従動ローラ
31 スピンドル
32 回転速度センサ
n ノッチ
W 基板
Claims (10)
- 基板の周縁部を複数のローラで保持しつつローラを回転駆動することにより基板を回転させ、回転する基板に洗浄部材を接触させつつ、基板に洗浄液を供給して基板を洗浄する基板洗浄装置において、
基板の回転速度が設定された回転速度より低下する状態になる基板とローラとの間に発生するスリップを検知するスリップ検知手段と、
前記ローラを所定の押し付け力で基板に押し付けるローラ押し付け機構と、
前記スリップ検知手段が基板とローラとの間のスリップを検知した際に、前記ローラ押し付け機構による押し付け力を増加させる制御部とを備えたことを特徴とする基板洗浄装置。 - 前記スリップ検知手段は、基板の周縁部にあるノッチが前記ローラに当たることでローラに発生する振動を検出する振動センサからなることを特徴とする請求項1記載の基板洗浄装置。
- 前記スリップ検知手段は、基板の周縁部にあるノッチを検出可能な光センサからなることを特徴とする請求項1記載の基板洗浄装置。
- 前記スリップ検知手段は、基板の周縁部に接触して回転する従動ローラと、従動ローラの回転速度を測定する速度センサからなることを特徴とする請求項1記載の基板洗浄装置。
- 前記ローラ押し付け機構は、エアシリンダまたは電動シリンダからなることを特徴とする請求項1乃至4のいずれか1項に記載の基板洗浄装置。
- 前記制御部は、前記スリップ検知手段から受信した信号が所定の閾値を下回った時に前記ローラ押し付け機構による押し付け力を増加させることを特徴とする請求項1乃至5のいずれか1項に記載の基板洗浄装置。
- 基板の周縁部を複数のローラで保持しつつローラを回転駆動することにより基板を回転させ、回転する基板に洗浄部材を接触させつつ基板に洗浄液を供給して基板を洗浄する基板洗浄方法において、
複数の回転するローラを所定の押し付け力で基板に押し付けて基板を設定された回転速度で回転させ、回転する基板に洗浄部材を接触させて洗浄し、
前記洗浄中に、基板の回転速度が前記設定された回転速度より低下する状態になる基板とローラとの間に発生するスリップの有無を監視し、
前記スリップが発生した際に、基板に対する前記ローラの押し付け力を増加させて基板の洗浄を継続することを特徴とする基板洗浄方法。 - 基板の周縁部にあるノッチが前記ローラに当たることでローラに発生する振動を検出する振動センサによって前記スリップを検知することを特徴とする請求項7記載の基板洗浄方法。
- 基板の周縁部にあるノッチを検出可能な光センサによって基板の回転を監視することで、前記スリップを検知することを特徴とする請求項7記載の基板洗浄方法。
- 基板の周縁部に接触して回転する従動ローラの回転を速度センサによって監視することで、前記スリップを検知することを特徴とする請求項7記載の基板洗浄方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015030489A JP6491903B2 (ja) | 2015-02-19 | 2015-02-19 | 基板洗浄装置および方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015030489A JP6491903B2 (ja) | 2015-02-19 | 2015-02-19 | 基板洗浄装置および方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016152382A JP2016152382A (ja) | 2016-08-22 |
| JP2016152382A5 JP2016152382A5 (ja) | 2018-02-08 |
| JP6491903B2 true JP6491903B2 (ja) | 2019-03-27 |
Family
ID=56696758
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015030489A Active JP6491903B2 (ja) | 2015-02-19 | 2015-02-19 | 基板洗浄装置および方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6491903B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023119847A1 (ja) * | 2021-12-24 | 2023-06-29 | 株式会社荏原製作所 | 基板処理方法および基板処理装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6792512B2 (ja) | 2017-05-16 | 2020-11-25 | 株式会社荏原製作所 | 基板洗浄装置および基板処理装置 |
| JP7115403B2 (ja) * | 2019-04-11 | 2022-08-09 | 株式会社Sumco | ウェーハの回転検出方法及びウェーハの回転検出システム |
| JP7078602B2 (ja) | 2019-12-25 | 2022-05-31 | 株式会社荏原製作所 | 洗浄装置、研磨装置、洗浄装置において基板の回転速度を算出する装置および方法 |
| CN114472265B (zh) * | 2021-12-31 | 2022-11-08 | 华海清科股份有限公司 | 一种晶圆清洗方法及晶圆清洗装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10289889A (ja) * | 1997-04-16 | 1998-10-27 | Dainippon Screen Mfg Co Ltd | 基板処理装置 |
| JPH11219930A (ja) * | 1998-01-30 | 1999-08-10 | Ebara Corp | 洗浄装置 |
| JP4620911B2 (ja) * | 2001-09-05 | 2011-01-26 | 芝浦メカトロニクス株式会社 | 基板の処理装置及び処理方法 |
| JP2003092278A (ja) * | 2001-09-18 | 2003-03-28 | Shibaura Mechatronics Corp | 基板の処理装置及び処理方法 |
| US7685667B2 (en) * | 2005-06-14 | 2010-03-30 | Taiwan Semiconductor Manufacturing Co., Ltd. | Post-CMP cleaning system |
| US20080216863A1 (en) * | 2007-03-09 | 2008-09-11 | Applied Materials, Inc. | Methods and apparatus for monitoring the rotation of a substrate during cleaning |
| JP6125884B2 (ja) * | 2013-04-23 | 2017-05-10 | 株式会社荏原製作所 | 基板処理装置及び処理基板の製造方法 |
-
2015
- 2015-02-19 JP JP2015030489A patent/JP6491903B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023119847A1 (ja) * | 2021-12-24 | 2023-06-29 | 株式会社荏原製作所 | 基板処理方法および基板処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016152382A (ja) | 2016-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6491903B2 (ja) | 基板洗浄装置および方法 | |
| KR102401524B1 (ko) | 기판 세정 장치 및 기판 세정 장치에 의해 실행되는 방법 | |
| JP6145334B2 (ja) | 基板処理装置 | |
| US8051522B2 (en) | Substrate treatment apparatus | |
| JP6767834B2 (ja) | 基板洗浄装置及び基板処理装置 | |
| US20170239784A1 (en) | Polishing apparatus and polishing method | |
| JP2016152382A5 (ja) | ||
| JP2009107084A (ja) | 研削装置 | |
| JP2013153141A5 (ja) | ||
| JP2006324429A (ja) | 機械的化学的研磨後の洗浄方法 | |
| JP3615724B2 (ja) | ウェハクリーニング装置 | |
| JP4719052B2 (ja) | 基板処理装置および基板処理方法 | |
| JP2007294490A (ja) | 基板の洗浄装置およびこれを用いた基板の洗浄方法 | |
| JP2010238765A (ja) | 半導体ウェーハの両面研削装置及び両面研削方法 | |
| JP2002313765A (ja) | ブラシ洗浄装置及びその制御方法 | |
| JP6435036B2 (ja) | 回転保持装置及び基板洗浄装置 | |
| JPH10189512A (ja) | 基板洗浄装置 | |
| JP6632900B2 (ja) | 基板洗浄装置、洗浄具および基板処理装置、ならびに、洗浄具の取り外し、取り付けおよび交換方法 | |
| JP4493286B2 (ja) | ワークの研磨方法及び装置 | |
| JP6736713B2 (ja) | 基板洗浄装置および基板洗浄装置で実行される方法 | |
| JP2006237098A (ja) | 半導体ウェーハの両面研磨装置及び両面研磨方法 | |
| JP2005317576A (ja) | 基板洗浄装置、及び基板洗浄装置における洗浄ブラシの基準位置の決定方法 | |
| JP6895565B2 (ja) | 基板洗浄装置および基板洗浄装置で実行される方法 | |
| JP6243229B2 (ja) | 回転保持装置及び基板洗浄装置 | |
| JP2005268330A (ja) | 半導体ウェーハの研磨方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171220 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180827 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180904 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190304 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6491903 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |