JP6483684B2 - 電気自動車又はハイブリッド自動車における回生ブレーキの制御 - Google Patents
電気自動車又はハイブリッド自動車における回生ブレーキの制御 Download PDFInfo
- Publication number
- JP6483684B2 JP6483684B2 JP2016532712A JP2016532712A JP6483684B2 JP 6483684 B2 JP6483684 B2 JP 6483684B2 JP 2016532712 A JP2016532712 A JP 2016532712A JP 2016532712 A JP2016532712 A JP 2016532712A JP 6483684 B2 JP6483684 B2 JP 6483684B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- brake
- regenerative brake
- signal
- calculation mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001172 regenerating effect Effects 0.000 title claims description 58
- 238000004364 calculation method Methods 0.000 claims description 34
- 238000000034 method Methods 0.000 claims description 14
- 230000004913 activation Effects 0.000 claims description 8
- 238000001914 filtration Methods 0.000 claims description 6
- 238000012545 processing Methods 0.000 claims description 5
- 238000004590 computer program Methods 0.000 claims description 3
- 238000001994 activation Methods 0.000 description 7
- 230000000295 complement effect Effects 0.000 description 4
- 238000012937 correction Methods 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000009849 deactivation Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 231100001261 hazardous Toxicity 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/24—Electrodynamic brake systems for vehicles in general with additional mechanical or electromagnetic braking
- B60L7/26—Controlling the braking effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/0076—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/18—Controlling the braking effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/02—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels
- B60T1/10—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels by utilising wheel movement for accumulating energy, e.g. driving air compressors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/58—Combined or convertible systems
- B60T13/585—Combined or convertible systems comprising friction brakes and retarders
- B60T13/586—Combined or convertible systems comprising friction brakes and retarders the retarders being of the electric type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/042—Brake-action initiating means for personal initiation foot actuated by electrical means, e.g. using travel or force sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
- B60W20/14—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion in conjunction with braking regeneration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
- B60W30/18127—Regenerative braking
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D61/00—Brakes with means for making the energy absorbed available for use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/42—Control modes by adaptive correction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/89—Repartition of braking force, e.g. friction braking versus regenerative braking
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/947—Characterized by control of braking, e.g. blending of regeneration, friction braking
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Regulating Braking Force (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
− 能動安全システムからのフラグ信号を受信すること、
− フラグ信号の値の変化を検出すること、
− 受信するフラグ信号の値が変化して、能動安全システムによる制御の起動に対応する値になるとき、カウンタ値をインクリメントすること、
− カウンタ値を閾値と比較すること、
− カウンタ値が前記閾値に達すると、第1の計算モードに従う回生ブレーキ設定値の生成を終了し、第2の計算モードに従うこの回生ブレーキ設定値の生成を課すように、制御信号を形成すること
を含む。
− 車両の能動安全システムからのフラグ信号を受信するための受信手段、
− 受信したフラグ信号の値の変化の検出し、受信したフラグ信号が、能動安全システムによる制御の起動に対応する値をとるように値を変化させるときに、カウンタ値をインクリメントし、カウンタを閾値と比較し、カウンタが閾値に達すると、第1の計算モードに従う回生ブレーキ設定値の生成を終了し、第2の計算モードに従うこの回生ブレーキ設定値の生成を課すために、制御信号を形成するように構成された処理手段
を含む。
Claims (9)
- 第1の回生ブレーキ手段、並びに前記第1の回生ブレーキ手段から分離された第2のブレーキ手段を備える車両での、回生ブレーキの制御の方法であって、前記方法は、第1の計算モードによる車両のドライバペダルからのブレーキ要求信号の関数として、回生ブレーキ設定値を生成するように設計されており、前記方法は、
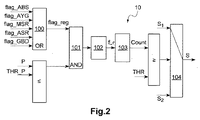
マスターシリンダ圧力値(P)を示す信号を受信し、前記マスターシリンダ圧力値を複数の圧力閾値と比較すること、
前記車両の能動安全システムからのフラグ信号(flag_reg)を受信すること、
前記受信したフラグ信号の値の変化を検出すること、
前記受信したフラグ信号が、前記能動安全システムによる制御の起動に対応する値をとるように値を変化させるとき、前記マスターシリンダ圧力値が第1の圧力閾値(THR_P)より低い場合に、カウンタ値(Count)をインクリメントすること、
前記マスターシリンダ圧力値が第2の圧力閾値を超えるとき、前記フラグ信号が前記能動安全システムによる制御の停止に対応する値を維持する場合に、前記カウンタ値(Count)をデクリメントすること、
前記カウンタ値を閾値(THR)と比較すること、及び
前記カウンタ値が前記閾値に達すると、第1の計算モードに従う前記回生ブレーキ設定値の生成を終了し、第2の計算モードに従う前記回生ブレーキ設定値の生成を課すために、制御信号(S)を形成すること
を含む方法。 - 前記回生ブレーキ設定値は、前記第2の計算モードに従って生成され、ゼロである、請求項1に記載の制御方法。
- 値の変化を検出することに先立って、前記受信したフラグ信号に、時間フィルタ処理(102)を適用することを含む、請求項1又は2に記載の制御方法。
- 複数の指令を含むコンピュータプログラムであって、これらの指令は、プロセッサによって実行されると請求項1から3のいずれか一項に記載の方法を実行する、コンピュータプログラム。
- 第1の回生ブレーキ手段、並びに前記第1の回生ブレーキ手段から分離された第2のブレーキ手段を備える車両での、回生ブレーキを制御するための装置(10)であって、前記装置は、第1の計算モードによる車両のドライバペダルからのブレーキ要求信号の関数として、回生ブレーキ設定値を生成するように設計されており、前記装置は、
マスターシリンダ圧力値(P)を示す信号を受信する受信手段、
前記マスターシリンダ圧力値を複数の圧力閾値と比較する比較手段、
前記車両の能動安全システムからのフラグ信号(flag_reg)を受信するための受信手段、及び
前記受信したフラグ信号の値の変化を検出し、前記受信したフラグ信号が、前記能動安全システムによる制御の起動に対応する値をとるように値を変化させるときに、前記マスターシリンダ圧力値が第1の圧力閾値(THR_P)より低い場合に、カウンタ値(Count)をインクリメントするように構成され、前記マスターシリンダ圧力値が第2の圧力閾値を超え、前記フラグ信号が前記能動安全システムによる制御の停止に対応する値を維持する場合に、前記カウンタ値(Count)をデクリメントするように構成され、前記カウンタ値を閾値(THR)と比較するように構成され、かつ、前記カウンタ値が前記閾値に達すると、第1の計算モードに従う前記回生ブレーキ設定値の生成を終了し、第2の計算モードに従うこの回生ブレーキ設定値の生成を課すために、制御信号(S)を形成するように構成された処理手段
を含む装置。 - 第1の回生ブレーキ手段(13)、並びに前記第1の回生ブレーキ手段から分離された第2のブレーキ手段を備える車両での、回生ブレーキを制御するためのシステムであって、
第1の計算モードに従って、また第2の計算モードに従って、前記車両のドライバペダルからのブレーキ要求信号の関数として前記回生ブレーキ設定値を生成することができる回生ブレーキ設定値を生成するための生成モジュール、及び
請求項5に記載の装置
を備えるシステム。 - 前記生成モジュールは、前記第2のブレーキ手段によって実行されたブレーキを表わすブレーキ値に、課された前記計算モードによって決まる係数を乗ずることによって、前記回生ブレーキ設定値を計算するように構成されたブレーキ管理モジュール(12)を備える、請求項6に記載のシステム。
- 請求項7に記載の前記システムを備える自動車(1)。
- 後輪(14)にブレーキを働かせることができる電気アクチュエータ(13)を備える、請求項8に記載の自動車(1)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1357801 | 2013-08-06 | ||
| FR1357801A FR3009523B1 (fr) | 2013-08-06 | 2013-08-06 | Controle du freinage regeneratif dans un vehicule electrique ou hybride |
| PCT/FR2014/051731 WO2015018993A2 (fr) | 2013-08-06 | 2014-07-04 | Controle du freinage regeneratif dans un vehicule electrique ou hybride |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016527866A JP2016527866A (ja) | 2016-09-08 |
| JP6483684B2 true JP6483684B2 (ja) | 2019-03-13 |
Family
ID=49578434
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016532712A Active JP6483684B2 (ja) | 2013-08-06 | 2014-07-04 | 電気自動車又はハイブリッド自動車における回生ブレーキの制御 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9802491B2 (ja) |
| EP (1) | EP3030447B1 (ja) |
| JP (1) | JP6483684B2 (ja) |
| KR (1) | KR102107003B1 (ja) |
| CN (1) | CN105555580B (ja) |
| FR (1) | FR3009523B1 (ja) |
| WO (1) | WO2015018993A2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3009523B1 (fr) * | 2013-08-06 | 2015-08-07 | Renault Sa | Controle du freinage regeneratif dans un vehicule electrique ou hybride |
| KR20160071850A (ko) * | 2014-12-12 | 2016-06-22 | 현대자동차주식회사 | 회생 제동 협조 제어 시 제동력 제어 방법 |
| EP3323659B1 (en) * | 2016-11-16 | 2019-06-26 | Nio Nextev Limited | Fault detection in electric vehicles |
| FR3069120B1 (fr) * | 2017-07-17 | 2024-08-16 | Valeo Equip Electr Moteur | Procede de controle- commande d'une machine electrique tournante, notamment pour vehicule automobile |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3792756B2 (ja) * | 1994-08-29 | 2006-07-05 | 株式会社豊田中央研究所 | アンチロックブレーキ制御装置 |
| JPH0937407A (ja) * | 1995-07-18 | 1997-02-07 | Toyota Motor Corp | 回生制動制御装置 |
| JP3850517B2 (ja) * | 1997-06-13 | 2006-11-29 | 富士重工業株式会社 | アンチロックブレーキ装置付車両の自動変速機制御装置 |
| JP3379397B2 (ja) * | 1997-08-12 | 2003-02-24 | トヨタ自動車株式会社 | 液圧ブレーキ装置 |
| JP2001268704A (ja) * | 2000-03-16 | 2001-09-28 | Mazda Motor Corp | モータ駆動車両のエネルギ回収制御装置 |
| JP3777974B2 (ja) * | 2000-11-15 | 2006-05-24 | 三菱自動車工業株式会社 | 車両の制動装置 |
| US6859712B2 (en) * | 2001-08-31 | 2005-02-22 | General Motors Corporation | Adaptive compensation method for an anti-lock brake control |
| US20050269875A1 (en) * | 2004-06-08 | 2005-12-08 | Kazuya Maki | Vehicle brake device |
| JP4760246B2 (ja) * | 2004-09-30 | 2011-08-31 | トヨタ自動車株式会社 | 液圧ブレーキ装置 |
| US7885751B2 (en) * | 2005-01-07 | 2011-02-08 | Toyota Jidosha Kabushiki Kaisha | Vehicle integrated control apparatus integrally executing vehicle driving support control, driving force control, and braking force control |
| JP2006311791A (ja) * | 2005-03-31 | 2006-11-09 | Advics:Kk | 車両用ブレーキ制御装置 |
| JP2007030631A (ja) * | 2005-07-25 | 2007-02-08 | Advics:Kk | 車両用ブレーキ制御装置 |
| JP5095955B2 (ja) * | 2006-05-11 | 2012-12-12 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP2007308097A (ja) * | 2006-05-22 | 2007-11-29 | Toyota Motor Corp | 車両およびその制御方法 |
| JP4722779B2 (ja) * | 2006-06-22 | 2011-07-13 | 日立オートモティブシステムズ株式会社 | ブレーキ制御装置 |
| KR100901591B1 (ko) * | 2006-11-17 | 2009-06-08 | 현대자동차주식회사 | 전기자동차용 회생제동 제어 방법 |
| JP2008265397A (ja) * | 2007-04-17 | 2008-11-06 | Nissan Motor Co Ltd | 車両の制動制御装置 |
| JP2008301590A (ja) * | 2007-05-30 | 2008-12-11 | Honda Motor Co Ltd | 電動車両 |
| DE102007056359B4 (de) * | 2007-11-16 | 2016-10-27 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Steuerung eines Bremssystems eines Kraftfahrzeugs |
| DE102008001973A1 (de) * | 2008-05-26 | 2009-12-03 | Robert Bosch Gmbh | Verfahren zum Regeln eines Schleppmomentes eines elektromotorisch angetriebenen Kraftfahrzeuges unter Berücksichtigung des auf der Fahrbahnoberfläche vorliegenden Reibwertes und Vorrichtung zum Durchführen eines solchen Verfahrens |
| US8544963B2 (en) * | 2009-09-25 | 2013-10-01 | Toyota Jidosha Kabushiki Kaisha | Braking control apparatus |
| KR101765445B1 (ko) * | 2010-01-28 | 2017-08-07 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 모터 차량용 브레이크 시스템 작동 방법 및 브레이크 시스템 |
| US8303049B2 (en) * | 2010-03-12 | 2012-11-06 | GM Global Technology Operations LLC | Method for operating a vehicle brake system |
| CN102470834B (zh) * | 2010-04-29 | 2014-11-05 | 丰田自动车株式会社 | 车辆用液压制动系统 |
| JP5222329B2 (ja) * | 2010-08-05 | 2013-06-26 | 本田技研工業株式会社 | 車両用制動装置 |
| JP5336445B2 (ja) * | 2010-09-01 | 2013-11-06 | 日立オートモティブシステムズ株式会社 | ブレーキ制御装置 |
| FR2982205B1 (fr) * | 2011-11-08 | 2014-04-11 | Renault Sa | Adaptation d'une consigne de freinage moteur simulee |
| JP5929173B2 (ja) | 2011-12-26 | 2016-06-01 | 株式会社アドヴィックス | ハイブリッド車両用運動制御装置 |
| FR3009523B1 (fr) * | 2013-08-06 | 2015-08-07 | Renault Sa | Controle du freinage regeneratif dans un vehicule electrique ou hybride |
-
2013
- 2013-08-06 FR FR1357801A patent/FR3009523B1/fr active Active
-
2014
- 2014-07-04 JP JP2016532712A patent/JP6483684B2/ja active Active
- 2014-07-04 WO PCT/FR2014/051731 patent/WO2015018993A2/fr active Application Filing
- 2014-07-04 EP EP14748240.0A patent/EP3030447B1/fr active Active
- 2014-07-04 US US14/909,239 patent/US9802491B2/en active Active
- 2014-07-04 KR KR1020167005996A patent/KR102107003B1/ko active IP Right Grant
- 2014-07-04 CN CN201480051504.4A patent/CN105555580B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN105555580A (zh) | 2016-05-04 |
| FR3009523A1 (fr) | 2015-02-13 |
| KR102107003B1 (ko) | 2020-05-06 |
| FR3009523B1 (fr) | 2015-08-07 |
| KR20160042012A (ko) | 2016-04-18 |
| EP3030447B1 (fr) | 2017-06-21 |
| US9802491B2 (en) | 2017-10-31 |
| US20160221449A1 (en) | 2016-08-04 |
| WO2015018993A2 (fr) | 2015-02-12 |
| EP3030447A2 (fr) | 2016-06-15 |
| CN105555580B (zh) | 2019-04-12 |
| WO2015018993A3 (fr) | 2015-04-16 |
| JP2016527866A (ja) | 2016-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108099615B (zh) | 控制电动车辆的制动的系统和方法 | |
| JP6818481B2 (ja) | 車両用回生制動協調制御システムの制動制御方法 | |
| JP5302749B2 (ja) | 電気自動車の制御装置 | |
| JP6396465B2 (ja) | 電気自動車またはハイブリッド車における、回生ブレーキの制御 | |
| CN104924913A (zh) | 将具有再生制动系统的车辆的减速度正常化 | |
| JP6483684B2 (ja) | 電気自動車又はハイブリッド自動車における回生ブレーキの制御 | |
| US20140195133A1 (en) | Vehicle braking force control device and method for controlling vehicle braking force | |
| CN105984468A (zh) | 操作电驱动模块的方法 | |
| US8494702B2 (en) | Method and driveline stability control system for a vehicle | |
| US11845434B2 (en) | Regenerative braking control method of vehicle | |
| CN112339744B (zh) | 用于控制车辆的车轮打滑的方法 | |
| Basrah et al. | Four wheel torque blending for slip control in a hybrid electric vehicle with a single electric machine | |
| US9227514B2 (en) | Adaptation of a simulated engine-braking instruction | |
| CN113060116A (zh) | 一种电动汽车驱动防滑控制方法 | |
| JP6209144B2 (ja) | 車両用制御システム | |
| CN112848915A (zh) | 驱动扭矩控制器、控制方法、汽车以及计算机存储介质 | |
| JP4325538B2 (ja) | 車両のモータトラクション制御装置 | |
| JP2006136177A (ja) | 車両のモータトラクション制御装置 | |
| JP2003327104A (ja) | 制動制御装置 | |
| CN114670648B (zh) | 电动汽车能量回收方法及电子设备 | |
| CN117261620B (zh) | 再生扭矩控制方法以及设备 | |
| JP7438619B2 (ja) | 回生制御装置 | |
| JP2016084110A (ja) | 車両の制御装置 | |
| CN114683862A (zh) | 电动汽车的制动能量回收协调方法及装置 | |
| JP2004001625A (ja) | 制動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170703 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180510 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180529 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190214 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6483684 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |