JP6335486B2 - 車両 - Google Patents
車両 Download PDFInfo
- Publication number
- JP6335486B2 JP6335486B2 JP2013239429A JP2013239429A JP6335486B2 JP 6335486 B2 JP6335486 B2 JP 6335486B2 JP 2013239429 A JP2013239429 A JP 2013239429A JP 2013239429 A JP2013239429 A JP 2013239429A JP 6335486 B2 JP6335486 B2 JP 6335486B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- rack
- rack bar
- vehicle
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L1/00—Supplying electric power to auxiliary equipment of vehicles
- B60L1/003—Supplying electric power to auxiliary equipment of vehicles to auxiliary motors, e.g. for pumps, compressors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2054—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed by controlling transmissions or clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D3/00—Steering gears
- B62D3/02—Steering gears mechanical
- B62D3/12—Steering gears mechanical of rack-and-pinion type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/08—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in a single plane transverse to the longitudinal centre line of the vehicle
- B62D7/09—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in a single plane transverse to the longitudinal centre line of the vehicle characterised by means varying the ratio between the steering angles of the steered wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
- B62D7/15—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels
- B62D7/1509—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels with different steering modes, e.g. crab-steering, or steering specially adapted for reversing of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
- B62D7/15—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels
- B62D7/159—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels characterised by computing methods or stabilisation processes or systems, e.g. responding to yaw rate, lateral wind, load, road condition
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/44—Wheel Hub motors, i.e. integrated in the wheel hub
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/24—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/84—Rear wheel steering; All wheel steerings
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Description
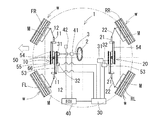
図2(a)(b)に示す直進状態の車輪位置で、前輪のステアリング装置10のラックケース50によって保持された第一ラックバー53と第二ラックバー54を一体移動可能な状態、つまり図9の第一ピニオンギア62と第二ピニオンギア65を互いに結合又は分離が可能な連結機構63が結合した状態とする。すると、車両のフレームに取り付けられたラックケース50内の対のラックバー53、54は、左右の同方向に同距離だけ同時に移動する。
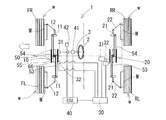
小回りモードを図4に示す。図3に示す前輪のステアリング装置10の動作に加え、後輪のステアリング装置20のラックケース内50の第一ラックバー53と第二ラックバー54を同方向に同距離移動可能な状態、つまり図9の連結機構63が結合した状態とする。前輪と同じく、車両のフレームに取り付けられたラックケース50内の対のラックバー53、54は、左右方向に同方向に同距離だけ同時に移動する。
その場回転モードを図5に示す。固定機構67によってラックケース50に対して同期ギアボックス66をその直進時に設定される位置で固定するとともに、連結機構63(図9参照)を分離することで、ラックケース50内の第一ラックバー53と第二ラックバー54は別々に動作可能となる。このとき、モード切替用アクチュエータ32からピニオンギア62の入力によって、第一ラックバー53と第二ラックバー54に介在して設けた第一同期ギア55の作用により、両ラックバー53、54は互いに相反する方向に同距離だけ同時に移動し、左右車輪wは逆方向に同時に転舵する。このように、固定機構67によってラックケース50に対して同期ギアボックス66を固定することによって、タイヤの接地面の傾斜や摩擦状態の違い等があっても、対のラックバー53、54を、固定された同期ギアボックス66を基準として、左右反対方向に同距離だけ同時に移動することができる。このため、左右車輪wを速やかに目標とする車輪角度とすることができ、舵角制御を安定的に行うことができる。
横方向移動モードを図6に示す。その場回転モードと同様に、固定機構67によってラックケース50に対して同期ギアボックス66をその直進時の位置で固定するとともに、連結機構63(図9参照)を分離することで、ラックケース50内の第一第一ラックバー53と第二ラックバー54は別々に動作可能となる。このとき、モード切替用アクチュエータ32からピニオンギア62の入力によって、第一ラックバー53と第二ラックバー54に介在して設けた第一同期ギア55の作用により、両ラックバー53、54は互いに相反する方向に同距離だけ同時に移動し、左右車輪wは逆方向に同時に転舵する。このように、固定機構67によってラックケース50に対して同期ギアボックス66を固定することによって、タイヤの接地面の傾斜や摩擦状態の違い等があっても、対のラックバー53、54を左右反対方向に同距離だけ同時に移動することができる。このため、左右車輪wを速やかに目標とする車輪角度とすることができ、舵角制御を安定的に行うことができる。
その他の走行モードとして、例えば、電子制御ユニット(ECU)40が、車両1が高速走行中であることを認識した時は、ECU40の出力に基づき、アクチュエータドライバ30が、後輪のモード切替用アクチュエータ32に指令して、後輪の左右輪w(RL、RR)を、平行状態よりも前方側がわずかに閉じた状態(トーイン状態)に設定する。これにより、安定した高速走行が可能となる。
なお、前述の各走行モードの切り替え時についても、適宜、このモード切替手段42を使用する。車室内にあるモード切替手段42を操作することで、通常走行モード、その場回転モード、横方向移動モード、小回りモード等を選択することができる。スイッチ操作等で切り替えが可能とすれば、より安全な操作が可能である。
10、20 ステアリング装置
12、22 タイロッド
31 転舵用アクチュエータ
53、54 ラックバー
55 (第一)同期ギア
60 ラックバー動作手段
62 第一ピニオンギア
63 連結機構
65 第二ピニオンギア
w 車輪
Claims (3)
- 転舵力発生手段と、
前側又は後側の少なくとも一方の左右車輪(w)を左右に転舵するステアリング装置(10、20)と、
を備え、前記ステアリング装置(10、20)が、
前記左右車輪(w)に接続され、この左右車輪(w)を転舵するタイロッド(12、22)と、
前記タイロッド(12、22)にそれぞれ接続された対のラックバー(53、54)と、
前記対のラックバー(53、54)を、同一方向又は逆方向に同距離移動させるラックバー動作手段(60)と、
を備え、前記転舵力発生手段の転舵力によって、前記対のラックバー(53、54)の両方を同時に移動するようにし、
前記ラックバー動作手段(60)が、
前記対のラックバー(53、54)にそれぞれ噛み合い、一方のラックバー(53)のラックの歯の並列方向に対する一方向への動きを他方のラックバー(54)の他方向への動きに変換する同期ギア(55)と、
前記一方のラックバー(53)に噛合する第一ピニオンギア(62)と、
前記他方のラックバー(54)に噛合する第二ピニオンギア(65)と、
前記第一ピニオンギア(62)と前記第二ピニオンギア(65)との間を結合又は分離する連結機構(63)と、
を備えた車両。 - 前記転舵力発生手段による転舵力が、運転者によるステアリング(2)の回転操作に伴って生じる回転力、又は、ステアリング(2)の回転操作に伴って作動する転舵用アクチュエータ(31)による回転力のいずれかである請求項1に記載の車両。
- 前側及び後側の車輪(w)の両方に同一の前記ステアリング装置(10、20)を設けた請求項1または2に記載の車両。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013239429A JP6335486B2 (ja) | 2013-11-20 | 2013-11-20 | 車両 |
| CN201480057231.4A CN105636855B (zh) | 2013-11-20 | 2014-11-18 | 车辆 |
| EP14864312.5A EP3072781B1 (en) | 2013-11-20 | 2014-11-18 | Vehicle |
| PCT/JP2014/080482 WO2015076253A1 (ja) | 2013-11-20 | 2014-11-18 | 車両 |
| US15/034,987 US9758190B2 (en) | 2013-11-20 | 2014-11-18 | Vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013239429A JP6335486B2 (ja) | 2013-11-20 | 2013-11-20 | 車両 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015098288A JP2015098288A (ja) | 2015-05-28 |
| JP2015098288A5 JP2015098288A5 (ja) | 2016-12-15 |
| JP6335486B2 true JP6335486B2 (ja) | 2018-05-30 |
Family
ID=53179515
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013239429A Expired - Fee Related JP6335486B2 (ja) | 2013-11-20 | 2013-11-20 | 車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9758190B2 (ja) |
| EP (1) | EP3072781B1 (ja) |
| JP (1) | JP6335486B2 (ja) |
| CN (1) | CN105636855B (ja) |
| WO (1) | WO2015076253A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6351944B2 (ja) * | 2013-09-26 | 2018-07-04 | Ntn株式会社 | ステアリング装置 |
| JP6297306B2 (ja) * | 2013-11-14 | 2018-03-20 | Ntn株式会社 | 車両 |
| JP2017001475A (ja) * | 2015-06-08 | 2017-01-05 | 井関農機株式会社 | 作業車 |
| CN106541795A (zh) * | 2016-09-26 | 2017-03-29 | 清华大学 | 旋翼气动式精确转向陆空移动机器人装置 |
| CN107140017B (zh) * | 2017-04-12 | 2019-03-05 | 西华大学 | 四轮转向四轮驱动的果园管理动力平台 |
| DE102017209733A1 (de) * | 2017-06-09 | 2018-12-13 | Robert Bosch Gmbh | Steer-by-Wire Lenksystem für ein Kraftfahrzeug |
| KR102008693B1 (ko) * | 2018-02-22 | 2019-08-08 | 주식회사 만도 | 로터리 센서 구조체 및 이를 포함하는 후륜 조향 장치 |
| JP7044664B2 (ja) * | 2018-08-24 | 2022-03-30 | ヤンマーパワーテクノロジー株式会社 | 自動走行システム |
| DE102018127731B3 (de) * | 2018-11-07 | 2020-04-23 | Schaeffler Technologies AG & Co. KG | Kraftfahrzeug und Verfahren zum Lenken eines Kraftfahrzeugs |
| JP7206884B2 (ja) * | 2018-12-17 | 2023-01-18 | トヨタ自動車株式会社 | 特殊転舵装置を備えた車両 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3279813A (en) * | 1964-11-16 | 1966-10-18 | C & M Ind Associates Inc | Selective four-wheel steering mechanism |
| FI77191C (fi) * | 1984-04-06 | 1989-02-10 | Lokari Tuote Oy | Styrmekanism foer fordon. |
| JPS62172608A (ja) | 1986-01-27 | 1987-07-29 | 日立電線株式会社 | 交互反転撚り線条体付きケ−ブルの反転撚り装置 |
| JPH0623443Y2 (ja) * | 1986-04-23 | 1994-06-22 | 日本車輌製造株式会社 | 大物運搬車の車輪懸架装置 |
| JPS63301185A (ja) * | 1987-05-30 | 1988-12-08 | Mazda Motor Corp | 車両の後輪操舵装置 |
| JPS63173766A (ja) * | 1987-09-21 | 1988-07-18 | Honda Motor Co Ltd | 車両の操舵方法 |
| JPH01172071A (ja) * | 1987-12-26 | 1989-07-06 | Honda Motor Co Ltd | 車両の前後輪操舵装置 |
| US5097917A (en) | 1987-12-26 | 1992-03-24 | Honda Giken Kogyo Kabushiki Kaisha | Steering system of vehicle |
| JPH03112724A (ja) * | 1989-09-25 | 1991-05-14 | Aisin Aw Co Ltd | 車両用モータの配線および配管装置 |
| JPH0471963A (ja) * | 1990-07-09 | 1992-03-06 | Aisin Seiki Co Ltd | 操舵装置 |
| US5082077A (en) * | 1990-10-09 | 1992-01-21 | Ford Motor Company | Offset steering gear assembly |
| JP2600374Y2 (ja) | 1992-09-04 | 1999-10-12 | 富士重工業株式会社 | 4輪操舵車両の後輪操舵装置 |
| CN100436227C (zh) * | 2003-10-02 | 2008-11-26 | 日产自动车株式会社 | 车辆转向装置 |
| JP4635754B2 (ja) | 2005-07-12 | 2011-02-23 | 日産自動車株式会社 | ステアリング装置 |
| JP2007210374A (ja) * | 2006-02-08 | 2007-08-23 | Fujitsu Ten Ltd | 車両の操舵制御装置及び操舵装置 |
| JP5157305B2 (ja) | 2006-09-22 | 2013-03-06 | 日産自動車株式会社 | 車輪位置可変車両 |
| JP4816589B2 (ja) * | 2007-08-09 | 2011-11-16 | トヨタ自動車株式会社 | 車両のステアリング装置 |
| US8126612B2 (en) * | 2008-10-27 | 2012-02-28 | Concordia University | Steering system and method for independent steering of wheels |
| JP5453689B2 (ja) * | 2010-03-30 | 2014-03-26 | 東芝三菱電機産業システム株式会社 | 位置決め装置 |
| JP2012017093A (ja) | 2010-06-09 | 2012-01-26 | Ntn Corp | 電気自動車 |
| WO2013054357A2 (en) | 2011-08-25 | 2013-04-18 | Indian Institute Of Technology, Bombay | Mechanism for omni-directional steering using mechanical logic gate synchronizers |
| US8851226B2 (en) * | 2012-03-30 | 2014-10-07 | Bombardier Transportation Gmbh | Mechanical boolean steering |
| CN104245478A (zh) * | 2012-04-25 | 2014-12-24 | 株式会社捷太格特 | 电动助力转向装置 |
-
2013
- 2013-11-20 JP JP2013239429A patent/JP6335486B2/ja not_active Expired - Fee Related
-
2014
- 2014-11-18 US US15/034,987 patent/US9758190B2/en active Active
- 2014-11-18 EP EP14864312.5A patent/EP3072781B1/en not_active Not-in-force
- 2014-11-18 CN CN201480057231.4A patent/CN105636855B/zh not_active Expired - Fee Related
- 2014-11-18 WO PCT/JP2014/080482 patent/WO2015076253A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| US9758190B2 (en) | 2017-09-12 |
| CN105636855A (zh) | 2016-06-01 |
| JP2015098288A (ja) | 2015-05-28 |
| EP3072781A1 (en) | 2016-09-28 |
| US20160288828A1 (en) | 2016-10-06 |
| EP3072781A4 (en) | 2016-11-09 |
| CN105636855B (zh) | 2018-09-04 |
| WO2015076253A1 (ja) | 2015-05-28 |
| EP3072781B1 (en) | 2018-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6351944B2 (ja) | ステアリング装置 | |
| JP6335486B2 (ja) | 車両 | |
| JP6382545B2 (ja) | ステアリング装置及びそれを備えた車両 | |
| JP6297306B2 (ja) | 車両 | |
| JP6452944B2 (ja) | ステアリング装置 | |
| WO2014171389A1 (ja) | ステアリング装置、そのステアリング装置を用いた車両、及び、4輪転舵機構を備えた車両 | |
| JP6246010B2 (ja) | 車両及び走行モードの切り替え方法 | |
| WO2015050190A1 (ja) | ステアリング装置 | |
| JP6437189B2 (ja) | ステアリング装置及びステアリング装置システム | |
| WO2016121677A1 (ja) | ステアリング装置及びそれを備えた車両 | |
| JP6382544B2 (ja) | 走行モードの切り替え制御方法及び車両 | |
| WO2016117585A1 (ja) | ステアリング装置 | |
| JP2014210484A (ja) | 4輪転舵機構を備えた車両 | |
| JP2016124475A (ja) | ステアリング装置 | |
| JP2016132316A (ja) | ステアリング装置及び車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161027 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180403 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180501 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6335486 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |