JP6289973B2 - パラレルリンク機構およびリンク作動装置 - Google Patents
パラレルリンク機構およびリンク作動装置Info
- Publication number
- JP6289973B2 JP6289973B2 JP2014072281A JP2014072281A JP6289973B2 JP 6289973 B2 JP6289973 B2 JP 6289973B2 JP 2014072281 A JP2014072281 A JP 2014072281A JP 2014072281 A JP2014072281 A JP 2014072281A JP 6289973 B2 JP6289973 B2 JP 6289973B2
- Authority
- JP
- Japan
- Prior art keywords
- link
- end side
- shaft support
- hub
- rotary shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 title claims description 104
- 239000002184 metal Substances 0.000 claims description 5
- 238000005452 bending Methods 0.000 description 38
- 125000006850 spacer group Chemical group 0.000 description 14
- 238000000034 method Methods 0.000 description 6
- 230000002093 peripheral effect Effects 0.000 description 5
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000005553 drilling Methods 0.000 description 2
- 239000012636 effector Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 206010034719 Personality change Diseases 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000036316 preload Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/003—Programme-controlled manipulators having parallel kinematics
- B25J9/0045—Programme-controlled manipulators having parallel kinematics with kinematics chains having a rotary joint at the base
- B25J9/0048—Programme-controlled manipulators having parallel kinematics with kinematics chains having a rotary joint at the base with kinematics chains of the type rotary-rotary-rotary
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/08—Programme-controlled manipulators characterised by modular constructions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H21/00—Gearings comprising primarily only links or levers, with or without slides
- F16H21/46—Gearings comprising primarily only links or levers, with or without slides with movements in three dimensions
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- General Engineering & Computer Science (AREA)
- Transmission Devices (AREA)
- Manipulator (AREA)
Description
この発明の他の目的は、2自由度の角度を制御することが可能で、かつ広範な作動範囲の動作を精度良く行うことができ、低コストで製作できるリンク作動装置を提供することである。
単純な形状である厚さが一定の板状の部材を用いることで、安価で量産性に優れた回転軸支持部材となる。特に、回転軸支持部材を金属板とすると、加工が容易である。
位置決めピンを用いることで、組立てが容易となり、作業者による組立て精度のばらつきが少なくなる。また、湾曲部材と回転軸支持部材の位置関係の精度が向上するため、パラレルリンク機構のスムーズな動作を実現できる。
2つ以上の回転軸支持部材で回転軸の両端を支持することで、回転対偶部のモーメント荷重に対する剛性が高くなり、パラレルリンク機構全体の剛性が向上する。2つ以上の回転軸支持部材が同一形状であると、部品の共通化を図れ、安価で量産性が良くなる。
この構成であると、パラレルリンク機構の仕様を変更しても部品を共通化することができる。例えば、パラレルリンク機構のサイズを変更する場合、湾曲部材の形状のみを変更して、回転軸支持部材や回転軸は共通のものを使用することができる。また、端部リンク部材と中央リンク部材の回転対偶部、および端部リンク部材とリンクハブの回転対偶部に用いる軸受のサイズを変更する場合、回転軸支持部材や回転軸の形状を変更し、湾曲部材は共通のもの使用することができる。
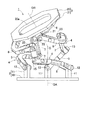
3組以上のリンク機構のうちの2組以上のリンク機構に姿勢変更用アクチュエータを設ければ、基端側のリンクハブに対する前記先端側のリンクハブの姿勢を確定することができる。これにより、2自由度の角度を制御することが可能なリンク作動装置を低コストで実現できる。
この構成によると、パラレルリンク機構に直接、姿勢変更用アクチュエータを設置できるため、駆動機構部が簡素な構造となり、安価なリンク作動装置を実現できる。
この構成によると、減速機構を備えたロータリアクチュエータを用いることで許容負荷を向上できる。また、慣性モーメント比を低減できるため、高速動作を実現できる。
この発明における第2の発明のパラレルリンク機構は、基端側のリンクハブに対し先端側のリンクハブを、3組以上のリンク機構を介して姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記基端側のリンクハブおよび先端側のリンクハブに一端が回転可能に連結された基端側および先端側の端部リンク部材と、これら基端側および先端側の端部リンク部材の他端に両端がそれぞれ回転可能に連結された中央リンク部材とを備え、前記端部リンク部材は、任意の角度に湾曲した湾曲部材と、この湾曲部材の一端または両端に固定され、前記中央リンク部材または前記リンクハブに直接または軸受を介して回転可能に連結される回転軸を支持する回転軸支持部材とを有し、前記端部リンク部材は2つ以上の前記回転軸支持部材を有し、これら2つ以上の回転軸支持部材により前記回転軸の両端を支持するため、高速、高精度で、広範な作動範囲の動作を行うことができ、組立てや仕様変更が容易であり、安価で高剛性である。
図1、図2はこのパラレルリンク機構の互いに異なる状態を示す正面図、図3は同パラレルリンク機構の一部を省略した正面図である。このパラレルリンク機構1は、基端側のリンクハブ2に対し先端側のリンクハブ3を3組のリンク機構4を介して姿勢変更可能に連結したものである。図3では、1組のリンク機構4のみが示されている。リンク機構4の数は、4組以上であっても良い。
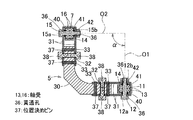
図6に示すように、端部リンク部材5は、1つの湾曲部材30と、この湾曲部材30の両端の外径側の側面と内径側の側面にそれぞれ固定された計4つの回転軸支持部材31とで構成される。4つの回転軸支持部材31は同一形状である。
回転軸支持部材31の素材として、単純な形状である厚さが一定の板状の部材を用いることで、安価で量産性に優れた回転軸支持部材31となる。特に、素材を金属板とすると、輪郭形状や各孔34,35,36の加工が容易である。
このように位置決めピン37を用いることで、組立てが容易となり、作業者による組立て精度のばらつきが少なくなる。また、湾曲部材30と回転軸支持部材31の位置関係の精度が向上するため、パラレルリンク機構1のスムーズな動作を実現できる。
このように、外径側と内径側の2つの回転軸支持部材31で回転軸12(15)の両端を支持することで、回転対偶部のモーメント荷重に対する剛性が高くなり、パラレルリンク機構1全体の剛性が向上する。
まず、外径側の回転軸支持部材31を、湾曲部材30に対して位置決めピン37で位置決めして、ボルト38で固定する。次に、この固定された外径側の回転軸支持部材31の貫通孔36に回転軸12を外径側から挿通し、回転軸12に対して内径側からスペーサ40、回転軸連結部材11に設置された軸受13の内輪、スペーサ41を順に嵌めた後、回転軸12を内径側の回転軸支持部材31の貫通孔36に挿通する。次に、内径側の回転軸支持部材31を、湾曲部材30に対して位置決めピン37で位置決めして、ボルト38で固定する。最後に、回転軸12の雄ねじ部12bにナット42を螺着させ、このナット42を所定のトルクで締め付けて固定する。
図8の端部リンク部材5は、外径側の回転軸支持部材31は位置決めピン37により位置決めするが、内径側の回転軸支持部材31は位置決めピン37による位置決めは行わない構成である。外径側および内径側の回転軸支持部材31のいずれか一方を位置決めすれば、通常に要求される組立て精度を得ることができる。この構成であると、図6の構成と比較して組立て性が向上する。
図9の例とは逆に、湾曲部材30の両端における外径側に回転軸支持部30aを設け、内径側の側面に回転軸支持部材31を固定した構成としても良い。
2…基端側のリンクハブ
3…先端側のリンクハブ
4…リンク機構
5…基端側の端部リンク部材
6…先端側の端部リンク部材
7…中央リンク部材
12,15,22,25…回転軸
13,16…軸受
30…湾曲部材
31…回転軸支持部材
36…貫通孔
37…位置決めピン
50…リンク作動装置
51…姿勢変更用アクチュエータ
51a…出力軸
52…減速機構
52a…出力軸
54…フランジ面
Claims (9)
- 基端側のリンクハブに対し先端側のリンクハブを、3組以上のリンク機構を介して姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記基端側のリンクハブおよび先端側のリンクハブに一端が回転可能に連結された基端側および先端側の端部リンク部材と、これら基端側および先端側の端部リンク部材の他端に両端がそれぞれ回転可能に連結された中央リンク部材とを備え、
前記端部リンク部材は、任意の角度に湾曲した湾曲部材と、この湾曲部材の一端または両端に固定され、前記中央リンク部材または前記リンクハブに直接または軸受を介して回転可能に連結される回転軸を支持する回転軸支持部材とを有し、
前記回転軸支持部材は、前記湾曲部材に対して位置決めピンにより位置決めした状態で固定したことを特徴とするパラレルリンク機構。 - 基端側のリンクハブに対し先端側のリンクハブを、3組以上のリンク機構を介して姿勢を変更可能に連結し、前記各リンク機構は、それぞれ前記基端側のリンクハブおよび先端側のリンクハブに一端が回転可能に連結された基端側および先端側の端部リンク部材と、これら基端側および先端側の端部リンク部材の他端に両端がそれぞれ回転可能に連結された中央リンク部材とを備え、
前記端部リンク部材は、任意の角度に湾曲した湾曲部材と、この湾曲部材の一端または両端に固定され、前記中央リンク部材または前記リンクハブに直接または軸受を介して回転可能に連結される回転軸を支持する回転軸支持部材とを有し、前記端部リンク部材は2つ以上の前記回転軸支持部材を有し、これら2つ以上の回転軸支持部材により前記回転軸の両端を支持するパラレルリンク機構。 - 請求項2に記載のリンク作動装置において、前記2つ以上の回転軸支持部材は、互いに同一の形状であるパラレルリンク機構。
- 請求項2または請求項3に記載のパラレルリンク機構において、前記端部リンク部材は、両端にそれぞれ2つ以上の前記回転軸支持部材を有し、一方端の2つ以上の回転軸支持部材により、前記中央リンク部材に対して回転可能に連結される前記回転軸の両端を支持し、かつ他方端の2つ以上の回転軸支持部材により、前記リンクハブに対して回転可能に連結される前記回転軸の両端を支持するパラレルリンク機構。
- 請求項1ないし請求項4のいずれか1項に記載のパラレルリンク機構において、前記回転軸支持部材は、厚さが一定の板状の部材に、前記回転軸、またはこの回転軸および前記軸受が挿通される貫通孔を設けたものであるパラレルリンク機構。
- 請求項5に記載のパラレルリンク機構において、前記厚さが一定の板状の部材は金属板であるパラレルリンク機構。
- 請求項1ないし請求項6のいずれか1項に記載のパラレルリンク機構において、前記3組以上のリンク機構のうちの2組以上のリンク機構に、前記基端側のリンクハブに対する前記先端側のリンクハブの姿勢を任意に変更する姿勢変更用アクチュエータを設けたリンク作動装置。
- 請求項7に記載のリンク作動装置において、前記姿勢変更用アクチュエータは、出力軸にこの出力軸の中心線と直交するフランジ面を有するロータリアクチュエータであり、前記基端側の端部リンク部材は、前記基端側のリンクハブに回転自在に連結される回転軸を支持する前記回転軸支持部材を有し、前記姿勢変更用アクチュエータの前記フランジ面に前記回転軸支持部材を結合したリンク作動装置。
- 請求項7に記載のリンク作動装置において、前記姿勢変更用アクチュエータは減速機構を備えたロータリアクチュエータであり、前記減速機構の出力軸はこの出力軸の中心線と直交するフランジ面を有し、前記基端側の端部リンク部材は、前記基端側のリンクハブに回転自在に連結される回転軸を支持する前記回転軸支持部材を有し、前記姿勢変更用アクチュエータの前記フランジ面に前記回転軸支持部材を結合したリンク作動装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014072281A JP6289973B2 (ja) | 2014-03-31 | 2014-03-31 | パラレルリンク機構およびリンク作動装置 |
| EP15773915.2A EP3128206B1 (en) | 2014-03-31 | 2015-03-23 | Parallel link mechanism and link actuation device |
| MX2016012803A MX2016012803A (es) | 2014-03-31 | 2015-03-23 | Mecanismo de enlace paralelo y dispositivo de enlace de accionamiento. |
| CN201580017039.7A CN106133395B (zh) | 2014-03-31 | 2015-03-23 | 平行连杆机构和连杆操动装置 |
| PCT/JP2015/058731 WO2015151898A1 (ja) | 2014-03-31 | 2015-03-23 | パラレルリンク機構およびリンク作動装置 |
| US15/280,408 US10406677B2 (en) | 2014-03-31 | 2016-09-29 | Parallel link mechanism and link actuation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014072281A JP6289973B2 (ja) | 2014-03-31 | 2014-03-31 | パラレルリンク機構およびリンク作動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015194207A JP2015194207A (ja) | 2015-11-05 |
| JP6289973B2 true JP6289973B2 (ja) | 2018-03-07 |
Family
ID=54240226
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014072281A Active JP6289973B2 (ja) | 2014-03-31 | 2014-03-31 | パラレルリンク機構およびリンク作動装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10406677B2 (ja) |
| EP (1) | EP3128206B1 (ja) |
| JP (1) | JP6289973B2 (ja) |
| CN (1) | CN106133395B (ja) |
| MX (1) | MX2016012803A (ja) |
| WO (1) | WO2015151898A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022092064A1 (ja) | 2020-10-28 | 2022-05-05 | Ntn株式会社 | 球面リンク機構、球面リンク作動装置、リンク作動装置及び原点位置決め方法 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10955084B2 (en) * | 2013-12-06 | 2021-03-23 | Huber Diffraktionstechnik Gmbh & Co. Kg | Redundant parallel positioning table device |
| US11458579B2 (en) | 2013-12-06 | 2022-10-04 | Huber Diffraktionstechnik Gmbh & Co. Kg | Redundant parallel positioning table device |
| JP6453066B2 (ja) * | 2014-12-05 | 2019-01-16 | Ntn株式会社 | リンク作動装置の制御方法 |
| CN105538290B (zh) * | 2015-12-14 | 2017-11-07 | 北京工业大学 | 一种具有一个移动自由度的对称耦合机构 |
| CN105397800B (zh) * | 2015-12-23 | 2017-04-05 | 北京工业大学 | 非对称两自由度移动多环耦合机构 |
| JP6262193B2 (ja) * | 2015-12-24 | 2018-01-17 | Ntn株式会社 | リンク作動装置 |
| CN105598954B (zh) * | 2016-03-24 | 2017-09-22 | 褚宏鹏 | 大工作空间两转动并联机构 |
| JP6719956B2 (ja) * | 2016-04-20 | 2020-07-08 | Ntn株式会社 | 双腕型作動装置 |
| WO2017213034A1 (ja) * | 2016-06-08 | 2017-12-14 | Ntn株式会社 | リンク作動装置 |
| JP7089852B2 (ja) * | 2017-05-15 | 2022-06-23 | Ntn株式会社 | リンク作動装置 |
| JP6297622B2 (ja) * | 2016-06-08 | 2018-03-20 | Ntn株式会社 | リンク作動装置 |
| CN106393063B (zh) * | 2016-09-20 | 2019-02-19 | 北京工业大学 | 单自由度移动十二面体可展对称耦合机构 |
| CN106346493B (zh) * | 2016-11-09 | 2018-10-09 | 北京工业大学 | 一种菱形十二面体的空间可展耦合机构 |
| CN106313016B (zh) * | 2016-11-09 | 2018-10-09 | 北京工业大学 | 一种对称三自由度移动耦合机构 |
| JP6498738B1 (ja) * | 2017-09-26 | 2019-04-10 | Ntn株式会社 | リンク作動装置 |
| JP6534751B1 (ja) * | 2018-01-09 | 2019-06-26 | Ntn株式会社 | パラレルリンク機構およびリンク作動装置 |
| CN108644333B (zh) * | 2018-06-08 | 2023-10-27 | 燕山大学 | 一种球面连杆运动装置 |
| CN112888878B (zh) * | 2018-10-10 | 2024-07-26 | 国立大学法人九州工业大学 | 平行连杆机构和连杆致动装置 |
| CN113597523B (zh) | 2019-03-22 | 2024-03-15 | Ntn株式会社 | 平行连杆机构和连杆致动装置 |
| CN109955281A (zh) * | 2019-04-26 | 2019-07-02 | 哈尔滨工业大学(深圳) | 基于绳索驱动的二自由度大转角柔性机器人关节、机器人 |
| TWI757959B (zh) * | 2020-03-27 | 2022-03-11 | 國立成功大學 | 並聯式三軸線性機器人 |
| JP2023047743A (ja) * | 2021-09-27 | 2023-04-06 | Ntn株式会社 | パラレルリンク機構およびリンク作動装置 |
| CN114102665B (zh) * | 2021-12-15 | 2022-06-21 | 北京工业大学 | 基于折纸结构的模块化多铰链可伸缩刚柔耦合空间机械臂 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5656905A (en) * | 1995-04-03 | 1997-08-12 | Tsai; Lung-Wen | Multi-degree-of-freedom mechanisms for machine tools and the like |
| US5979264A (en) * | 1997-03-13 | 1999-11-09 | Ross-Hime Designs, Incorporated | Robotic manipulator |
| US5893296A (en) * | 1997-03-13 | 1999-04-13 | Ross-Hime Designs, Incorporated | Multiple rotatable links robotic manipulator |
| JP2000094245A (ja) | 1998-09-17 | 2000-04-04 | Fanuc Ltd | パラレルリンク機構を具備する作業装置 |
| JP4551527B2 (ja) * | 2000-03-16 | 2010-09-29 | 山下ゴム株式会社 | 金属製部材の結合方法 |
| US6418811B1 (en) * | 2000-05-26 | 2002-07-16 | Ross-Hime Designs, Inc. | Robotic manipulator |
| CN1190297C (zh) * | 2002-12-24 | 2005-02-23 | 北京交通大学 | 一种具有三移动和一转动的四自由度并联机器人机构 |
| CN1878640A (zh) * | 2003-12-03 | 2006-12-13 | Ntn株式会社 | 联动装置 |
| US7971505B2 (en) * | 2004-03-11 | 2011-07-05 | Ntn Corporation | Link actuating device |
| US7478576B2 (en) * | 2005-03-22 | 2009-01-20 | Ross-Hime Designs, Inc. | Robotic manipulator |
| JP4877533B2 (ja) * | 2006-11-15 | 2012-02-15 | 村田機械株式会社 | パラレルメカニズム |
| DE102007004166A1 (de) * | 2007-01-29 | 2008-08-14 | Robert Bosch Gmbh | Vorrichtung zum Bewegen und Positionieren eines Gegenstandes im Raum |
| JP5675258B2 (ja) * | 2010-10-14 | 2015-02-25 | Ntn株式会社 | リンク作動装置 |
| EP2674265A4 (en) * | 2011-02-07 | 2014-08-06 | Jx Nippon Oil & Energy Corp | BODY OF SHAPED PIPE |
| JP2013068280A (ja) * | 2011-09-22 | 2013-04-18 | Ntn Corp | リンク作動装置 |
| CN103857942B (zh) * | 2011-09-29 | 2016-12-14 | Ntn株式会社 | 连杆动作装置 |
| JP5951224B2 (ja) * | 2011-11-02 | 2016-07-13 | Ntn株式会社 | リンク作動装置の原点位置初期設定方法およびリンク作動装置 |
| CN103906947B (zh) * | 2011-11-04 | 2016-11-02 | Ntn株式会社 | 平行连杆机构、等速万向节和连杆动作装置 |
| JP6104701B2 (ja) * | 2013-05-16 | 2017-03-29 | Ntn株式会社 | リンク作動装置 |
| EP2835226A1 (en) * | 2013-08-09 | 2015-02-11 | Yamaha Hatsudoki Kabushiki Kaisha | Wiring structure for robot arm |
| JP6324033B2 (ja) * | 2013-11-22 | 2018-05-16 | Ntn株式会社 | リンク作動装置 |
| WO2016057967A2 (en) * | 2014-10-09 | 2016-04-14 | Harris Dynamics | Articulating torsional coupling |
-
2014
- 2014-03-31 JP JP2014072281A patent/JP6289973B2/ja active Active
-
2015
- 2015-03-23 WO PCT/JP2015/058731 patent/WO2015151898A1/ja active Application Filing
- 2015-03-23 EP EP15773915.2A patent/EP3128206B1/en active Active
- 2015-03-23 MX MX2016012803A patent/MX2016012803A/es active IP Right Grant
- 2015-03-23 CN CN201580017039.7A patent/CN106133395B/zh active Active
-
2016
- 2016-09-29 US US15/280,408 patent/US10406677B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022092064A1 (ja) | 2020-10-28 | 2022-05-05 | Ntn株式会社 | 球面リンク機構、球面リンク作動装置、リンク作動装置及び原点位置決め方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106133395B (zh) | 2018-09-28 |
| EP3128206B1 (en) | 2019-05-08 |
| EP3128206A4 (en) | 2018-02-28 |
| US20170014994A1 (en) | 2017-01-19 |
| US10406677B2 (en) | 2019-09-10 |
| WO2015151898A1 (ja) | 2015-10-08 |
| JP2015194207A (ja) | 2015-11-05 |
| CN106133395A (zh) | 2016-11-16 |
| EP3128206A1 (en) | 2017-02-08 |
| MX2016012803A (es) | 2016-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6289973B2 (ja) | パラレルリンク機構およびリンク作動装置 | |
| JP7022008B2 (ja) | リンク作動装置 | |
| JP5951224B2 (ja) | リンク作動装置の原点位置初期設定方法およびリンク作動装置 | |
| WO2017110739A1 (ja) | リンク作動装置 | |
| WO2020196164A1 (ja) | パラレルリンク機構およびリンク作動装置 | |
| WO2017213034A1 (ja) | リンク作動装置 | |
| JP2014224564A (ja) | リンク作動装置 | |
| JP6128797B2 (ja) | パラレルリンク機構、等速自在継手、およびリンク作動装置 | |
| JP2018194056A (ja) | リンク作動装置 | |
| JP6029969B2 (ja) | リンク作動装置 | |
| JP6396078B2 (ja) | パラレルリンク機構およびリンク作動装置 | |
| JP6352054B2 (ja) | パラレルリンク機構およびリンク作動装置 | |
| US11298814B2 (en) | Link actuating device having a proximal-end-side link hub, a distal-end-side link hub, and three or more link mechanisms | |
| JP6133162B2 (ja) | リンク作動装置 | |
| JP6007024B2 (ja) | 回転伝達装置 | |
| JP2011230241A (ja) | パラレルリンクロボット | |
| JP2016153159A (ja) | パラレルリンク機構を用いた作業装置 | |
| WO2016080472A1 (ja) | パラレルリンク機構を用いた作業装置 | |
| JP2020060253A (ja) | パラレルリンク機構およびリンク作動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170808 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171002 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180123 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6289973 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |