JP6242573B2 - 車路認識方法及びシステム - Google Patents
車路認識方法及びシステム Download PDFInfo
- Publication number
- JP6242573B2 JP6242573B2 JP2012270596A JP2012270596A JP6242573B2 JP 6242573 B2 JP6242573 B2 JP 6242573B2 JP 2012270596 A JP2012270596 A JP 2012270596A JP 2012270596 A JP2012270596 A JP 2012270596A JP 6242573 B2 JP6242573 B2 JP 6242573B2
- Authority
- JP
- Japan
- Prior art keywords
- road
- lane
- width
- vehicle
- calculating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 34
- 230000000694 effects Effects 0.000 claims description 3
- 238000000926 separation method Methods 0.000 description 6
- 230000002159 abnormal effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/60—Doppler effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/10—Path keeping
- B60Y2300/12—Lane keeping
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/52—Discriminating between fixed and moving objects or between objects moving at different speeds
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9329—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles cooperating with reflectors or transponders
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description
好ましくは、前記車両が位置している車路を計算する段階は、前記計算された走行道路の全体幅と前記走行車路の幅Lane_Wに基づいて前記走行道路の全体車路数Total_Laneを計算する段階を含むことができる。
(Current_Lane−0.5)×Lane_W=Distance_L×sin(Angle_L)
また、前記課題を解決するための本発明の他の実施例による車路認識方法は、走行方向道路の中央分離帯の位置を検出する対象検出器(objectdetector)と、前方の路面映像を撮影する映像撮影機とを利用して、車両が位置した車路を認識する方法であって、前記対象検出器によって前記中央分離帯の位置を得る段階;前記映像撮影機によって前記前方の路面映像を得る段階;前記路面映像から走行車路の幅Lane_Wを計算する段階;及び前記計算された走行車路の幅Lane_Wと前記中央分離帯の位置に基づいて前記車両が位置している車路Current_Laneを計算する段階;を含むことができる。
前記ガードレールとは異なるものでも、道路の最右側を警戒するための施設物であって、前記レーダービームを反射できる施設物であれば、本発明の技術的な思想が適用可能である。
前記角度Angle_L、Angle_R及び距離Distance_L、Distance_R、そして道路の全体幅Widthを求めるプロセスは当業者に自明であるので、本明細書でこれに対する詳細な説明は省略する。
(Current_Lane−0.5)×Lane_W=Distance_L×sin(Angle_L)
前記全体車路数Tatal_Laneを求める時、割った商の整数値が全体車路数であり、小数点以下は車路に含まれない路肩の幅でありうる。
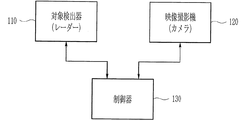
110 対象検出器(レーダー)
120 映像撮影機(カメラ)
130 制御器
Claims (7)
- 走行方向の道路の左側及び右側にある固定物の位置を検出する対象検出器(object detector)と、前方の路面映像を撮影する映像撮影機とを利用して、車両が位置した車路を認識する方法であって、
前記対象検出器によって前記固定物の位置を得る段階;
前記映像撮影機によって前記前方の路面映像を得る段階;
前記左側及び右側にある前記固定物の位置に基づいて走行道路の全体幅Widthを計算する段階;
前記路面映像から走行車路の幅Lane_Wを計算する段階;及び
前記計算された走行車路の幅Lane_Wと前記走行道路の全体幅Widthに基づいて前記車両が位置している車路Current_Laneを計算する段階;
を含み、
前記対象検出器はドップラー効果を利用するレーダーであって、
前記固定物の位置を得る段階は、
前記車両から一定距離の前方に位置した左側及び右側の固定物から反射して受信された各レーダービームと前記車両の進行方向との間に形成する左側偏向角度Angle_L及び右側偏向角度Angle_Rを検出する段階を含み、
前記走行道路の全体幅を計算する段階は、
前記反射して受信されたレーダービームから前記左側固定物及び右側固定物と前記レーダーとの間の距離Distance_L、Distance_Rを計算する段階と、
前記計算された左側固定物及び右側固定物と前記レーダーとの間の距離と、前記左側偏向角度及び右側偏向角度と、を利用して前記走行道路の全体幅Widthを得る段階と、を含み、
前記車両が位置している車路Current_Laneを計算する段階は、
前記左側偏向角度Angle_L及び右側偏向角度Angle_R、前記走行道路の全体幅Width、前記左側固定物及び右側固定物と前記レーダーとの間の距離Distance_L、Distance_R、及び前記走行車路の幅Lane_Wを利用して前記車路Current_Laneを計算することを特徴とする、車路認識方法。 - 前記左側固定物は中央分離帯であり、前記右側固定物はガードレールであって、
前記レーダービームが受信されなければ、走行車路の認識を終了する段階をさらに含むことを特徴とする、請求項1に記載の車路認識方法。 - 前記走行道路の全体幅を計算する段階は、
下記公式によって計算することを特徴とする、請求項1に記載の車路認識方法。
Width=(Distance_L×sin(Angle_L))+(Distance_R×sin(Angle_R)) - 前記車両が位置している車路を計算する段階は、
前記計算された走行道路の全体幅と前記走行車路の幅Lane_Wに基づいて前記走行道路の全体車路数Total_Laneを計算する段階を含むことを特徴とする、請求項3に記載の車路認識方法。 - 前記走行道路の全体車路数Total_Laneを計算する段階は、
前記走行道路の全体幅Widthを前記走行車路の幅Lane_Wで割って、割った商の整数値を前記全体車路数Total_Laneとすることを特徴とする、請求項4に記載の車路認識方法。 - 前記車両が位置している車路Current_Laneを計算する段階は、下記公式;
(Current_Lane−0.5)×Lane_W=Distance_L×sinAngle_L
によって計算することを特徴とする、請求項3に記載の車路認識方法。 - 車両に備えて、道路の左側及び右側に設けられた固定物の位置を検出する対象検出器;
車両に備えて、前記道路の路面映像を撮影する映像撮影機;及び
前記対象検出器及び前記映像撮影機の信号から前記車両が位置している車路を認識する制御器を含み、
前記制御器は、設定されたプログラムによって動作する一つ以上のマイクロプロセッサーであって、前記設定されたプログラムは、請求項1乃至6のいずれか一項の方法を行うための一連の命令を含むことを特徴とする、車路認識システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2012-0119992 | 2012-10-26 | ||
| KR1020120119992A KR101405193B1 (ko) | 2012-10-26 | 2012-10-26 | 차로 인식 방법 및 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014086071A JP2014086071A (ja) | 2014-05-12 |
| JP6242573B2 true JP6242573B2 (ja) | 2017-12-06 |
Family
ID=50479752
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012270596A Active JP6242573B2 (ja) | 2012-10-26 | 2012-12-11 | 車路認識方法及びシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9470788B2 (ja) |
| JP (1) | JP6242573B2 (ja) |
| KR (1) | KR101405193B1 (ja) |
| CN (1) | CN103786729B (ja) |
| DE (1) | DE102012224498A1 (ja) |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101927155B1 (ko) * | 2012-10-19 | 2018-12-10 | 현대자동차 주식회사 | 도로 갓길의 공간 인지 방법 및 시스템 |
| DE102013021326A1 (de) * | 2013-12-17 | 2015-06-18 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Detektieren einer auf einem Boden aufgebrachten Markierung, Fahrerassistenzeinrichtung und Kraftfahrzeug |
| JP6357050B2 (ja) * | 2014-08-19 | 2018-07-11 | 日野自動車株式会社 | 運転支援システム |
| CN104163136A (zh) * | 2014-08-26 | 2014-11-26 | 无锡市恒通智能交通设施有限公司 | 行车智能辅助方法 |
| DE102014223259B4 (de) * | 2014-11-14 | 2021-10-14 | Conti Temic Microelectronic Gmbh | Verfahren zum Schätzen des Fahrstreifenverlaufs einer Fahrbahn |
| US9721471B2 (en) | 2014-12-16 | 2017-08-01 | Here Global B.V. | Learning lanes from radar data |
| US10262213B2 (en) | 2014-12-16 | 2019-04-16 | Here Global B.V. | Learning lanes from vehicle probes |
| JP6404722B2 (ja) * | 2015-01-21 | 2018-10-17 | 株式会社デンソー | 車両の走行制御装置 |
| DE102015001386A1 (de) * | 2015-02-04 | 2016-08-04 | Audi Ag | Verfahren zur Ermittlung einer Querpositionsinformantion eines Kraftfahrzeugs auf einer Fahrbahn und Kraftfahrzeug |
| KR101706455B1 (ko) * | 2015-04-15 | 2017-02-27 | 한양대학교 산학협력단 | 도로표지판 검출 기반 주행 차로 추정 방법 및 장치 |
| DE102015007592A1 (de) | 2015-06-16 | 2016-12-22 | Audi Ag | Trajektoriebasierte Fahrwerksregelung |
| US10503983B2 (en) * | 2015-08-19 | 2019-12-10 | Mitsubishi Electric Corporation | Lane recognition apparatus and lane recognition method |
| CN105136153B (zh) * | 2015-09-11 | 2018-06-26 | 江苏大学 | 一种车道线精确位置采集装置以及采集方法 |
| DE102015012362A1 (de) * | 2015-09-19 | 2017-03-23 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Verfahren zur Unterstützung eines Fahreres eines Kraftfahrzeuggespanns, Computerprogrammprodukt, Spurhalteassistent |
| KR101953128B1 (ko) * | 2015-10-22 | 2019-05-31 | 현대자동차주식회사 | 차량 및 차량의 제어 방법 |
| US9878711B2 (en) * | 2015-12-14 | 2018-01-30 | Honda Motor Co., Ltd. | Method and system for lane detection and validation |
| KR101836810B1 (ko) * | 2015-12-29 | 2018-03-09 | 아주대학교산학협력단 | 차로 판단 장치 |
| CN105843221B (zh) * | 2016-03-09 | 2019-04-12 | 法法汽车(中国)有限公司 | 车道保持方法及雷达、车道保持系统 |
| US10248871B2 (en) * | 2016-03-24 | 2019-04-02 | Qualcomm Incorporated | Autonomous lane detection |
| JP6654087B2 (ja) * | 2016-04-11 | 2020-02-26 | 株式会社デンソーウェーブ | 物体検知装置及び物体検知プログラム |
| US10048688B2 (en) | 2016-06-24 | 2018-08-14 | Qualcomm Incorporated | Dynamic lane definition |
| KR102078771B1 (ko) * | 2016-07-12 | 2020-02-19 | 현대자동차주식회사 | 차량, 및 그 제어방법 |
| CN107784864A (zh) * | 2016-08-26 | 2018-03-09 | 奥迪股份公司 | 车辆辅助驾驶方法及系统 |
| EP3324330A1 (en) * | 2016-11-16 | 2018-05-23 | Continental Automotive GmbH | Method for determining a course of lanes, driver assistance system, and vehicle |
| US10989791B2 (en) | 2016-12-05 | 2021-04-27 | Trackman A/S | Device, system, and method for tracking an object using radar data and imager data |
| KR102295577B1 (ko) * | 2017-02-08 | 2021-08-30 | 현대자동차주식회사 | Ecu, 상기 ecu를 포함하는 무인 자율 주행 차량, 및 이의 주행 차로 판단 방법 |
| US10453351B2 (en) * | 2017-07-17 | 2019-10-22 | Aurora Flight Sciences Corporation | System and method for detecting obstacles in aerial systems |
| KR102408743B1 (ko) * | 2017-07-27 | 2022-06-14 | 주식회사 에이치엘클레무브 | 자동차의 도로 진입 가능 여부를 판단하는 방법 및 시스템 |
| US10239451B1 (en) * | 2017-09-05 | 2019-03-26 | GM Global Technology Operations LLC | Systems and methods for providing relative lane assignment of objects at distances from the vehicle |
| KR102421855B1 (ko) | 2017-09-28 | 2022-07-18 | 삼성전자주식회사 | 주행 차로를 식별하는 방법 및 장치 |
| JP6663406B2 (ja) * | 2017-10-05 | 2020-03-11 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| CN109858307A (zh) * | 2017-11-30 | 2019-06-07 | 高德软件有限公司 | 一种车道线识别方法和装置 |
| KR102464607B1 (ko) * | 2017-12-27 | 2022-11-08 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| CN108345019A (zh) * | 2018-04-20 | 2018-07-31 | 长安大学 | 一种车辆所在车道的定位装置及方法 |
| KR102448164B1 (ko) * | 2018-07-20 | 2022-09-28 | 현대모비스 주식회사 | 차량용 레이더 제어 장치 및 방법 |
| CN109445428A (zh) * | 2018-10-08 | 2019-03-08 | 北京海纳川汽车部件股份有限公司 | 自动驾驶车辆的变道方法、装置及具有其的自动驾驶车辆 |
| CN109435940B (zh) * | 2018-11-15 | 2020-11-03 | 北京经纬恒润科技有限公司 | 一种公路车道的识别方法、装置及系统 |
| CN109348414B (zh) * | 2018-11-30 | 2021-03-12 | 中国联合网络通信集团有限公司 | 定位车辆所在车道的方法及设备 |
| CN109657641B (zh) * | 2018-12-29 | 2021-02-02 | 北京经纬恒润科技股份有限公司 | 一种车辆主辅路判断方法及装置 |
| KR20200090527A (ko) * | 2019-01-21 | 2020-07-29 | 현대자동차주식회사 | 차선 인식 장치 및 그 방법 |
| CN110221324B (zh) * | 2019-05-28 | 2021-04-27 | 上海车轮互联网服务有限公司 | 用于定位的数据处理方法及装置 |
| CN110422168B (zh) * | 2019-08-08 | 2020-06-16 | 智邮开源通信研究院(北京)有限公司 | 车道识别系统、方法及自动驾驶汽车 |
| WO2021097844A1 (zh) * | 2019-11-22 | 2021-05-27 | 驭势(上海)汽车科技有限公司 | 基于多传感器数据融合的护栏估计方法和车载设备 |
| US11603094B2 (en) | 2020-02-20 | 2023-03-14 | Toyota Motor North America, Inc. | Poor driving countermeasures |
| US11527154B2 (en) | 2020-02-20 | 2022-12-13 | Toyota Motor North America, Inc. | Wrong way driving prevention |
| CN115702450A (zh) * | 2020-06-23 | 2023-02-14 | 株式会社电装 | 本车位置推断装置、行驶位置推断方法 |
| CN111899513A (zh) * | 2020-08-11 | 2020-11-06 | 东风汽车集团有限公司 | 一种基于车辆周围物体感知的行驶车道判断方法 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05342500A (ja) * | 1992-06-11 | 1993-12-24 | Nissan Motor Co Ltd | 車間距離検出装置 |
| US5633642A (en) * | 1993-11-23 | 1997-05-27 | Siemens Aktiengesellschaft | Radar method and device for carrying out the method |
| JPH1031799A (ja) * | 1996-07-15 | 1998-02-03 | Toyota Motor Corp | 自動走行制御装置 |
| JP3843502B2 (ja) * | 1996-09-30 | 2006-11-08 | マツダ株式会社 | 車両用動体認識装置 |
| JPH10325869A (ja) * | 1997-05-26 | 1998-12-08 | Honda Motor Co Ltd | 車両用レーダ装置及びこれを用いた自動走行制御システム |
| JP3575352B2 (ja) * | 1999-10-25 | 2004-10-13 | 株式会社デンソー | 車両用位置標定装置及び記録媒体 |
| JP2002225657A (ja) * | 2001-02-06 | 2002-08-14 | Oki Electric Ind Co Ltd | 車両の走行レーン検出システム |
| GB0111979D0 (en) * | 2001-05-17 | 2001-07-04 | Lucas Industries Ltd | Sensing apparatus for vehicles |
| GB0115433D0 (en) * | 2001-06-23 | 2001-08-15 | Lucas Industries Ltd | An object location system for a road vehicle |
| JP4100269B2 (ja) * | 2003-06-17 | 2008-06-11 | 日産自動車株式会社 | 車両用道路形状認識装置 |
| KR100559870B1 (ko) * | 2003-11-04 | 2006-03-13 | 현대자동차주식회사 | 차량의 주행차로 변경방법 |
| JP4811201B2 (ja) * | 2005-12-06 | 2011-11-09 | 日産自動車株式会社 | 走路境界線検出装置、および走路境界線検出方法 |
| JP4793094B2 (ja) * | 2006-05-17 | 2011-10-12 | 株式会社デンソー | 走行環境認識装置 |
| DE102006027326A1 (de) * | 2006-06-13 | 2007-12-20 | Robert Bosch Gmbh | Spurwechselassistent für Kraftfahrzeuge |
| EP2168079B1 (en) * | 2007-01-23 | 2015-01-14 | Valeo Schalter und Sensoren GmbH | Method and system for universal lane boundary detection |
| JP2008273251A (ja) * | 2007-04-25 | 2008-11-13 | Toyota Motor Corp | 車両の警報装置 |
| DE102009009211A1 (de) * | 2008-02-20 | 2009-09-10 | Continental Teves Ag & Co. Ohg | Verfahren und Assistenzsystem zum Erfassen von Objekten im Umfeld eines Fahrzeugs |
| JP2009252198A (ja) * | 2008-04-11 | 2009-10-29 | Suzuki Motor Corp | 走行環境推測装置、方法及びプログラム並びに車線逸脱警報装置及び操舵アシスト装置 |
| WO2010099789A1 (de) * | 2009-03-04 | 2010-09-10 | Continental Teves Ag & Co. Ohg | Verfahren zur automatischen erkennung eines fahrmanövers eines kraftfahrzeugs und ein dieses verfahren umfassendes fahrerassistenzsystem |
| JP5007840B2 (ja) * | 2009-05-22 | 2012-08-22 | トヨタ自動車株式会社 | 運転支援装置 |
| JP4927908B2 (ja) | 2009-05-29 | 2012-05-09 | クラリオン株式会社 | 車線位置検知システム |
| JP2011048641A (ja) * | 2009-08-27 | 2011-03-10 | Toyota Motor Corp | 物体検出装置及び運転支援装置 |
| DE102010033729B4 (de) * | 2010-08-07 | 2014-05-08 | Audi Ag | Verfahren und Vorrichtung zum Bestimmen der Position eines Fahrzeugs auf einer Fahrbahn sowie Kraftwagen mit einer solchen Vorrichtung |
| JP2012089005A (ja) | 2010-10-21 | 2012-05-10 | Honda Elesys Co Ltd | 画像処理装置、及び画像処理方法 |
| KR20120044495A (ko) * | 2010-10-28 | 2012-05-08 | 주식회사 만도 | 차량의 차선인식시스템 |
| KR20120046543A (ko) | 2010-11-02 | 2012-05-10 | 현대자동차주식회사 | 차선인식 경로안내 시스템 |
-
2012
- 2012-10-26 KR KR1020120119992A patent/KR101405193B1/ko active IP Right Grant
- 2012-12-11 JP JP2012270596A patent/JP6242573B2/ja active Active
- 2012-12-21 US US13/724,248 patent/US9470788B2/en active Active
- 2012-12-28 DE DE102012224498.0A patent/DE102012224498A1/de active Pending
- 2012-12-28 CN CN201210599194.2A patent/CN103786729B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR101405193B1 (ko) | 2014-06-27 |
| CN103786729B (zh) | 2018-03-23 |
| US20140118182A1 (en) | 2014-05-01 |
| DE102012224498A1 (de) | 2014-04-30 |
| CN103786729A (zh) | 2014-05-14 |
| KR20140053723A (ko) | 2014-05-08 |
| US9470788B2 (en) | 2016-10-18 |
| JP2014086071A (ja) | 2014-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6242573B2 (ja) | 車路認識方法及びシステム | |
| EP3358302B1 (en) | Travel control method and travel control device | |
| JP6451844B2 (ja) | 車両位置判定装置及び車両位置判定方法 | |
| RU2678599C1 (ru) | Устройство прокладки маршрута и навигации по маршруту и способ прокладки маршрута и навигации по маршруту | |
| CN102081861B (zh) | 车载装置及认知支援系统 | |
| US10239539B2 (en) | Vehicle travel control method and vehicle travel control device | |
| US10710583B2 (en) | Vehicle control apparatus | |
| US20120277990A1 (en) | Method and apparatus for determining a plausible lane for guiding a vehicle and an automobile | |
| CN102396002A (zh) | 目标探测装置 | |
| JP2007178271A (ja) | 自位置認識システム | |
| KR102386317B1 (ko) | 차량 및 그 충돌 회피 방법 | |
| WO2018131062A1 (ja) | 走行路認識装置及び走行路認識方法 | |
| JP7255345B2 (ja) | 走行車線認識装置、走行車線認識方法およびプログラム | |
| JPWO2020025991A1 (ja) | 走行軌跡補正方法、走行制御方法、及び走行軌跡補正装置 | |
| JP2019168432A (ja) | 自車位置推定装置 | |
| WO2018030159A1 (ja) | 認識装置、及び、認識方法 | |
| JP3440956B2 (ja) | 車両用走行路検出装置 | |
| WO2017013692A1 (ja) | 走行車線判定装置及び走行車線判定方法 | |
| KR102630991B1 (ko) | 차량의 위치 결정 방법, 위치 결정 장치 및 주행 제어 시스템 | |
| US20190095724A1 (en) | Surroundings monitoring device, surroundings monitoring method, and storage medium | |
| JP6627135B2 (ja) | 車両位置判定装置 | |
| JP2019070895A (ja) | 走路認識装置 | |
| JPH03220410A (ja) | 車両用位置標定装置 | |
| JP7167891B2 (ja) | 画像処理装置 | |
| US20230031485A1 (en) | Device and method for generating lane information |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20140811 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140929 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150730 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160531 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160831 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20161121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170515 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171010 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171108 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6242573 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |