JP6140958B2 - 歯車機構、減速機及びロボットアーム - Google Patents
歯車機構、減速機及びロボットアーム Download PDFInfo
- Publication number
- JP6140958B2 JP6140958B2 JP2012210920A JP2012210920A JP6140958B2 JP 6140958 B2 JP6140958 B2 JP 6140958B2 JP 2012210920 A JP2012210920 A JP 2012210920A JP 2012210920 A JP2012210920 A JP 2012210920A JP 6140958 B2 JP6140958 B2 JP 6140958B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- tooth
- tooth tip
- teeth
- meshing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/102—Gears specially adapted therefor, e.g. reduction gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/02—Toothed gearings for conveying rotary motion without gears having orbital motion
- F16H1/04—Toothed gearings for conveying rotary motion without gears having orbital motion involving only two intermeshing members
- F16H1/12—Toothed gearings for conveying rotary motion without gears having orbital motion involving only two intermeshing members with non-parallel axes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
- F16H1/321—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear the orbital gear being nutating
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/19—Drive system for arm
- Y10S901/25—Gearing
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19642—Directly cooperating gears
- Y10T74/1966—Intersecting axes
Description
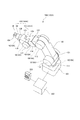
以下、本発明の第1実施形態に係るロボット装置500について、図1から図6を参照しながら説明する。まず、第1実施形態に係るロボット装置500の概略構成について、図1を参照しながら説明する。図1は、本発明の第1実施形態に係るロボット装置の概略構成を示す斜視図である。
次に、本発明の第2実施形態に係るロボット装置500Aについて、図1を援用すると共に、図7から図11を参照しながら説明する。第2実施形態に係るロボット装置500Aは、減速機が第1実施形態と相違する。そのため、第2実施形態においては、第1実施形態と相違する点、即ち、減速機を中心に説明し、第1実施形態と同様の構成については、同じ符号を付してその説明を省略する。
4、4A 第2歯車
10、10A 減速機
36 歯
36a 歯先部
36b 凹状部
46 歯
46a 歯先部
46b 凹状部
101、101A ロボットアーム
500、500A ロボット装置
n 歯数差
Claims (7)
- 所定高さよりも先端側に形成される歯先部と、前記所定高さよりも歯元側で歯先部同士の間に形成される凹状部と、を複数有する歯面が円環状に形成された第1歯車と、
前記所定高さよりも先端側に形成される歯先部と、前記所定高さよりも歯元側で前記歯先部同士の間に形成される凹状部と、を前記第1歯車よりも多い数有する歯面が円環状に形成された第2歯車と、を備え、
前記第1歯車と前記第2歯車とは、前記歯先部の1つと前記凹状部の1つとが最も深く噛合う最噛合い位置、前記最噛合い位置の反対側であって歯先部同士がすれ違うすれ違い位置、前記すれ違い位置の両側で歯先部同士が接触する第1噛合い領域、前記第1噛合い領域よりも最噛合い位置側で互いの歯先部と凹状部とが接触する第2噛合い領域、を形成し得るように、前記第1歯車の歯面と前記第2歯車の歯面とが所定角度傾斜した状態で配置され、
前記第1歯車及び前記第2歯車のそれぞれの歯先部は、前記第1噛合い領域で歯先部同士が1点で接触する形状に形成され、
前記第1歯車の回転軸をZp、前記第2歯車の回転軸をZq、ZpとZqとの交点を原点O、Zp及びZqを含む面と直交する共通の軸をX、ZpとXとに直交する軸をYp、ZqとXとに直交する軸をYqとして、XYpZp座標系と、XYqZq座標系と、を設定したとき、
前記第1歯車及び前記第2歯車の半径をR、ZqのZpに対する傾斜角度をη、前記第1歯車の歯数をZ、前記第2歯車の歯数をZ+nとすると、
前記第1歯車及び前記第2歯車の前記歯先部の形状は、
yp=Rtan(η/2)cos(xpZ),yq=−Rtan(η/2)cos(xq(Z+n))
に基づいて形成された、
ことを特徴とする歯車機構。 - 前記第1歯車の凹状部は、前記第2歯車の歯先部が前記第1歯車の歯先部の周りを動く軌跡の外接線として求めた曲線で形成され、
前記第2歯車の凹状部は、前記第1歯車の歯先部が前記第2歯車の歯先部の周りを動く軌跡の外接線として求めた曲線で形成された、
ことを特徴とする請求項1に記載の歯車機構。 - 前記第1歯車及び前記第2歯車の前記歯先部の形状は、前記すれ違い位置で先端同士が接触する、
ことを特徴とする請求項2に記載の歯車機構。 - 前記第1歯車及び前記第2歯車の前記歯先部の形状は、前記すれ違い位置で先端同士が非接触となる形状に切削された、
ことを特徴とする請求項2に記載の歯車機構。 - 前記第1歯車と前記第2歯車との歯数差nは、1又は2である、
ことを特徴とする請求項2から4のいずれか1項に記載の歯車機構。 - 請求項1から5のいずれか1項に記載の歯車機構を1組以上備え、入力された回転を減速して出力する、
ことを特徴とする減速機。 - 駆動モータと、前記駆動モータに接続された請求項6に記載の減速機と、を有するアクチュエータが、少なくとも1つの関節に取り付けられた多関節のロボットアーム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012210920A JP6140958B2 (ja) | 2012-09-25 | 2012-09-25 | 歯車機構、減速機及びロボットアーム |
| CN201380054882.3A CN104755801B (zh) | 2012-09-25 | 2013-09-20 | 齿轮机构、减速器和机械手臂 |
| EP13777345.3A EP2901041A1 (en) | 2012-09-25 | 2013-09-20 | Gear mechanism, speed reducer, and robot arm |
| US14/422,881 US9427866B2 (en) | 2012-09-25 | 2013-09-20 | Gear mechanism, speed reducer, and robot arm |
| PCT/JP2013/076446 WO2014051131A1 (en) | 2012-09-25 | 2013-09-20 | Gear mechanism, speed reducer, and robot arm |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012210920A JP6140958B2 (ja) | 2012-09-25 | 2012-09-25 | 歯車機構、減速機及びロボットアーム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014066280A JP2014066280A (ja) | 2014-04-17 |
| JP2014066280A5 JP2014066280A5 (ja) | 2015-11-12 |
| JP6140958B2 true JP6140958B2 (ja) | 2017-06-07 |
Family
ID=49382556
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012210920A Active JP6140958B2 (ja) | 2012-09-25 | 2012-09-25 | 歯車機構、減速機及びロボットアーム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9427866B2 (ja) |
| EP (1) | EP2901041A1 (ja) |
| JP (1) | JP6140958B2 (ja) |
| CN (1) | CN104755801B (ja) |
| WO (1) | WO2014051131A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2018306966B2 (en) * | 2017-07-27 | 2021-07-22 | Fujitsu General Limited | Rotary compressor |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6429517B2 (ja) * | 2014-07-10 | 2018-11-28 | キヤノン株式会社 | 歯車機構、変速機及び多関節ロボットアーム |
| JP6507605B2 (ja) * | 2014-12-04 | 2019-05-08 | 三菱重工業株式会社 | 差動歯車変速機構 |
| DE112016000998T5 (de) * | 2015-03-02 | 2017-11-16 | Thk Co., Ltd. | Drehzahlverringerungs- oder Drehzahlerhöhungsvorrichtung |
| JP6611454B2 (ja) * | 2015-04-09 | 2019-11-27 | キヤノン株式会社 | 揺動歯車機構、変速機、アクチュエータ及びロボットアーム |
| US9768664B2 (en) | 2015-05-21 | 2017-09-19 | The Boeing Company | Balanced eccentric gear design and method |
| US10203022B2 (en) * | 2015-11-04 | 2019-02-12 | The Boeing Company | Elliptically interfacing wobble motion gearing system and method |
| US10024391B2 (en) | 2016-01-06 | 2018-07-17 | The Boeing Company | Elliptically interfacing gearbox |
| US10574109B2 (en) | 2016-04-28 | 2020-02-25 | The Boeing Company | Permanent magnet biased virtual elliptical motor |
| US10215244B2 (en) | 2017-03-02 | 2019-02-26 | The Boeing Company | Elliptically interfacing gear assisted braking system |
| US10520063B2 (en) | 2017-04-21 | 2019-12-31 | The Boeing Company | Mechanical virtual elliptical drive |
| US10267383B2 (en) * | 2017-05-03 | 2019-04-23 | The Boeing Company | Self-aligning virtual elliptical drive |
| WO2020034373A1 (zh) * | 2018-08-17 | 2020-02-20 | 北京智能大艾机器人科技有限公司 | 一种端面齿摆线针轮副和章动减速装置 |
| US10968969B2 (en) | 2019-03-18 | 2021-04-06 | The Boeing Company | Nutational braking systems and methods |
| US11459098B2 (en) | 2019-11-27 | 2022-10-04 | The Boeing Company | Variable speed transmission and related methods |
| CN112836319B (zh) * | 2021-03-11 | 2022-07-22 | 西南交通大学 | 一种考虑非均匀分布齿根裂纹故障的仿真方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4512664Y1 (ja) | 1966-08-29 | 1970-06-02 | ||
| IS988B6 (is) * | 1975-04-15 | 1978-03-08 | Balcke-Dürr AG. | Tannhjólakerfi |
| JPS5254854A (en) * | 1975-10-30 | 1977-05-04 | Hasetsuku Enjiniaringu Kk | Multiengaged wn gear |
| JPS54120347A (en) | 1978-03-09 | 1979-09-18 | Buichi Nakamura | Skewed intermeshing differential face gearing mechanism |
| KR100189281B1 (ko) * | 1994-12-27 | 1999-06-01 | 미따라이 하지메 | 감속기 |
| CA2696888C (en) * | 2009-05-22 | 2012-06-26 | National University Corporation Fukushima University | Modified crown reduction gear |
| CN101793309A (zh) * | 2010-03-26 | 2010-08-04 | 傅元才 | 一种少齿差行星齿轮减速器及大扭矩动力扳手 |
| WO2011155071A1 (ja) | 2010-06-11 | 2011-12-15 | 国立大学法人福島大学 | 多自由度マニピュレータ |
| WO2011154981A1 (en) * | 2010-06-11 | 2011-12-15 | Orbitech Engineering S.R.L. | Kinematism with orbital movement with fixed orientation |
| CN101915286B (zh) * | 2010-08-30 | 2012-02-01 | 重庆大学 | 约束式少齿差减速器 |
| CA2863193C (en) * | 2012-11-13 | 2017-04-25 | National University Corporation Fukushima University | Crown gear deceleration mechanism |
-
2012
- 2012-09-25 JP JP2012210920A patent/JP6140958B2/ja active Active
-
2013
- 2013-09-20 WO PCT/JP2013/076446 patent/WO2014051131A1/en active Application Filing
- 2013-09-20 US US14/422,881 patent/US9427866B2/en active Active
- 2013-09-20 EP EP13777345.3A patent/EP2901041A1/en not_active Withdrawn
- 2013-09-20 CN CN201380054882.3A patent/CN104755801B/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2018306966B2 (en) * | 2017-07-27 | 2021-07-22 | Fujitsu General Limited | Rotary compressor |
| US11225971B2 (en) | 2017-07-27 | 2022-01-18 | Fujitsu General Limited | Rotary compressor |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104755801A (zh) | 2015-07-01 |
| EP2901041A1 (en) | 2015-08-05 |
| WO2014051131A1 (en) | 2014-04-03 |
| US20150224642A1 (en) | 2015-08-13 |
| US9427866B2 (en) | 2016-08-30 |
| CN104755801B (zh) | 2017-06-20 |
| JP2014066280A (ja) | 2014-04-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6140958B2 (ja) | 歯車機構、減速機及びロボットアーム | |
| TWI418452B (zh) | 機械手臂之腕關節結構 | |
| JP6305076B2 (ja) | 歯車機構、変速機及び多関節ロボットアーム | |
| JP4970250B2 (ja) | 産業用ロボットの手首関節に用いられる旋回部構造 | |
| JP4696912B2 (ja) | 産業用ロボット | |
| JP6297622B2 (ja) | リンク作動装置 | |
| JP2015209931A (ja) | 波動歯車装置及びロボットアーム | |
| WO2013069533A1 (ja) | リンク作動装置 | |
| JP7089852B2 (ja) | リンク作動装置 | |
| JP6807078B2 (ja) | ロボットの減速伝達装置 | |
| JP4388566B2 (ja) | 立体カム機構 | |
| JP2013121652A (ja) | パラレルリンク機構、等速自在継手、およびリンク作動装置 | |
| JP6429517B2 (ja) | 歯車機構、変速機及び多関節ロボットアーム | |
| CN107035820B (zh) | 一种多自由度节圆内啮合环型移动传动装置 | |
| JP2005127475A (ja) | リンク作動装置 | |
| JP2015224786A (ja) | パラレルリンク機構およびリンク作動装置 | |
| JP2015161382A (ja) | 歯車機構、変速機及び多関節ロボットアーム | |
| WO2011155070A1 (ja) | パラレルマニピュレータ | |
| JPH11287303A (ja) | パラレルリンク機構 | |
| JP7332337B2 (ja) | パラレルリンクロボット | |
| JP2023176206A (ja) | 歯車装置、及びロボット | |
| JP2019056444A (ja) | 変速機 | |
| JP4756360B2 (ja) | 球体輪駆動機構 | |
| JP2016128708A (ja) | 揺動型減速機及びロボットアーム | |
| JP2016200192A (ja) | 揺動歯車機構、変速機、アクチュエータ及びロボットアーム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150924 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160913 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170404 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170502 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6140958 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |