この発明で対象とするハイブリッド車両は、エンジンとモータとを有する動力伝達装置を備えており、特にその動力伝達装置は、エンジンの回転数やトルクを制御するモータと、駆動力を発生するモータとの少なくとも二つのモータを有している。そのエンジンとしては、ガソリンエンジンやディーゼルエンジン、あるいはガスエンジンなどが挙げられる。また、モータは、発電機能があるモータ(すなわちモータ・ジェネレータ)であることが好ましいが、エンジンの制御に作用するモータをモータ・ジェネレータによって構成し、他のモータは発電機能を備えていないモータであってもよい。
さらに、この発明で対象とするハイブリッド車両は、エンジンから出力された動力で走行する走行モードと、モータのみから出力された動力で走行する走行モードとを選択できるように構成されている。エンジンから出力された動力で走行する走行モードは、その動力の一部を駆動輪に伝達し、かつその動力の他の一部でモータ・ジェネレータを駆動して発電し、その電力で他のモータを駆動して走行するモードや、エンジンで発電機を駆動して発電し、その電力でモータを駆動して走行するモードなどを設定するように構成されていてよい。また、モータのみから出力された動力で走行するモードは、いずれか一つのモータで走行するモードや、二つのモータ(もしくはモータ・ジェネレータ)を共に駆動して走行するモードなどを設定するように構成されていてよい。
上述したようにエンジンから出力された動力で走行する走行モードと、モータのみから出力された動力で走行する走行モードとを設定することができる動力伝達装置の一例を、図2に模式的に示している。図2に示す動力伝達装置は、エンジン(ENG)1と二つのモータ・ジェネレータ2,3とが動力源として機能するように構成されている。具体的には、エンジン1が出力した動力を、この発明における第1モータに相当する第1モータ・ジェネレータ(MG1)2側と、この発明における出力軸に相当するドライブシャフト4側とに分割し、かつ第1モータ・ジェネレータ2で発生した電力を、この発明における第2モータに相当する第2モータ・ジェネレータ(MG2)3に供給して第2モータ・ジェネレータ3の駆動力をドライブシャフト4に加えるように構成された、いわゆるツーモータ式のハイブリッド駆動装置である。
ここに示す動力伝達装置で用いられている動力分割機構5は、三つの回転要素を有する差動機構によって構成されており、より具体的には遊星歯車機構によって構成されている。図2に示す例ではシングルピニオン型の遊星歯車機構が用いられており、その遊星歯車機構はエンジン1と同一の軸線上に配置され、その遊星歯車機構におけるサンギヤ6に第1モータ・ジェネレータ2が連結されている。なお、第1モータ・ジェネレータ2は、動力分割機構5に隣接して、エンジン1とは反対側に配置され、そのロータ2Rがサンギヤ6に連結されている。このサンギヤ6に対して同心円上にリングギヤ7が配置され、これらサンギヤ6とリングギヤ7とに噛み合っているピニオンギヤ8がキャリヤ9によって自転および公転できるように保持され、そのキャリヤ9がエンジン1と動力分割機構5との間に設けられた変速部10の出力要素に連結されている。そして、リングギヤ7にドライブギヤ11が連結されている。このドライブギヤ11は、変速部10と動力分割機構5との間に配置されている。なお、上記サンギヤ6がこの発明における第2回転要素に相当し、キャリヤ9がこの発明における第1回転要素に相当し、リングギヤ7がこの発明における第3回転要素に相当する。
図2に示す変速部10は、直結段と増速段(オーバードライブ(O/D)段)とに切り替えられるように構成されている。この変速部10は、三つの回転要素を有する差動機構によって構成されたシングルピニオン型の遊星歯車機構を備えている。具体的には、ピニオンギヤ12を自転および公転可能に保持するキャリヤ13にエンジン1の出力軸14が連結され、またリングギヤ15が動力分割機構5におけるキャリヤ8と一体に回転するように連結されている。そして、サンギヤ16とキャリヤ13との間にこれらを連結し、またその連結を解除するクラッチC0が設けられている。また、リングギヤ15と同心円上に配置されたサンギヤ16を固定し、またその固定を解除するブレーキB0が設けられている。これらのクラッチC0およびブレーキB0は、例えば油圧によって係合する摩擦係合機構によって構成することができる。なお、クラッチC0およびブレーキB0がこの発明における第1係合装置または第2係合装置に相当する。
一方、上記の動力分割機構5や第1モータ・ジェネレータ2などの回転中心軸線と平行にカウンタシャフト17が配置されており、上記のドライブギヤ11に噛み合っているカウンタドリブンギヤ18がこのカウンタシャフト17と一体に回転するように取り付けられている。このカウンタドリブンギヤ18はドライブギヤ11より小径のギヤであり、したがって動力分割機構5からカウンタシャフト17に向けてトルクを伝達する場合に減速作用(トルクの増幅作用)が生じる。
さらに、上記の動力分割機構5からドライブシャフト4に伝達されるトルクに、第2モータ・ジェネレータ3のトルクを負荷するように構成されている。すなわち、上記のカウンタシャフト17と平行に第2モータ・ジェネレータ3が配置されており、そのロータ3Rに連結されたリダクションギヤ19が上記のカウンタドリブンギヤ12に噛み合っている。そのリダクションギヤ19はカウンタドリブンギヤ18より小径であり、したがって第2モータ・ジェネレータ3のトルクを増幅してカウンタドリブンギヤ18もしくはカウンタシャフト17に伝達するように構成されている。
カウンタシャフト17には、更に、カウンタドライブギヤ20が一体に回転するように設けられており、このカウンタドライブギヤ20が終減速機であるデファレンシャルギヤ21におけるリングギヤ22に噛み合っている。図2では作図の都合上、デファレンシャル21の位置を図2での右側にずらして記載してある。
なお、図2に示す各モータ・ジェネレータ2,3は、図示しないインバータなどのコントローラを介して蓄電池などの蓄電装置に接続されている。そして、これらのモータ・ジェネレータ2,3はモータとして機能し、また発電機として機能するように電流が制御される。また、エンジン1は、そのスロットル開度や点火時期が制御され、さらには自動停止ならびに再始動の制御が行われる。
上述したように構成された動力伝達装置を有する車両は、エンジン1の動力で走行するエンジン走行モードと、二つのモータ・ジェネレータ2,3をモータとして機能させて、すなわち力行制御して走行するツインモータ走行モードと、いずれか一つのモータ・ジェネレータ(具体的には、第2モータ・ジェネレータ3)の動力で走行するシングルモータ走行モードとを選択することができるように構成されている。具体的には、クラッチC0およびブレーキB0を制御し、かつ各モータ・ジェネレータ2,3の出力トルクを制御することにより各走行モードを選択するように構成されている。なお、エンジン走行モードがこの発明における第1走行モードに相当し、ツインモータ走行モードがこの発明における第2走行モードに相当し、シングルモータ走行モードがこの発明における第3走行モードに相当する。
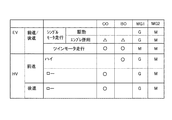
ここで、各走行モードにおけるクラッチC0とブレーキB0との係合および解放の状態と、各モータ・ジェネレータ2,3の動作の状態とを、図3に示す作動表を参照して説明する。図3で「EV」はエンジン1を停止させて走行するモードを示している。図3に示すようにシングルモータ走行モードによって駆動力を出力している場合あるいは制動力を作用させている場合には、クラッチC0とブレーキB0とが解放される。すなわち、変速部10がニュートラル状態にされて、エンジン1と動力分割機構5とのトルクの伝達が遮断される。その状態で、駆動力を駆動輪に伝達して走行する場合には、第2モータ・ジェネレータ3は力行制御され、制動力を作用させる場合には、第2モータ・ジェネレータ3が回生制御される。なお、図3には回生制御を「G」と示し、力行制御を「M」と示している。このようにクラッチC0とブレーキB0とを解放して、第2モータ・ジェネレータ3を力行制御することによりシングルモータ走行モードが設定される。
そのようにシングルモータ走行モードが設定されているときにおける変速部10の各回転要素および動力分割機構5の各回転要素の動作状態を図4に示している。図4に示す共線図は、左側が変速部10における各回転要素の動作状態を示し、右側が動力分割機構5における各回転要素の動作状態を示している。上述したようにクラッチC0とブレーキB0とが解放されていることにより変速部10がニュートラル状態となっている。また、変速部10の出力要素として機能するリングギヤ15が動力分割機構5におけるキャリヤ9に連結されているので、動力分割機構5から伝達された動力によって回転させられる。そして、エンジン1の慣性力(質量)やフリクショントルクが、サンギヤ16に連結された部材の慣性力(質量)よりも大きいので、エンジン1が停止してサンギヤ16が空転する。
上記のように変速部10がニュートラル状態にされたときに駆動力を出力して走行する場合には、第2モータ・ジェネレータ3が力行制御されて、その第2モータ・ジェネレータ3から出力された動力によって走行する。この場合、第1モータ・ジェネレータ2は空転させていてもよく、所定の回転数に維持されるように回生制御され、あるいは第1モータ・ジェネレータ2が回転しないように電流を流して回転を止めるように制御(d軸ロック制御)していてもよい。なお、図4に示す例では、第1モータ・ジェネレータ2の回転が止められている。一方、制動力を作用させる場合には、第2モータ・ジェネレータ3を回生制御させる。そのように第2モータ・ジェネレータ3を回生制御して制動力を作用させる場合には、変速部10をニュートラル状態としてエンジン1と動力分割装置5とのトルクの伝達を遮断することにより、エンジン1のポンピングロスなどによる制動力が作用して回生することができるトルクが低下することを抑制もしくは防止することができる。その結果、シングルモータ走行モード時における回生効率を向上させることができる。さらに、第1モータ・ジェネレータ2の回転を止めることにより、第1モータ・ジェネレータ2の連れ回りによる動力損失を低減することができるので、回生効率を向上させることができる。なお、後進走行時には、第2モータ・ジェネレータ3の回転方向および出力トルクの方向が反転させられる。
また、蓄電装置には充電量の上限があるので、その蓄電装置の充電量(State of Charge:SOC)が所定値以上のときには、シングルモータ走行モードで制動しているときであっても、過充電になることを防止するために、クラッチC0とブレーキB0とのいずれか一方が係合させられる。すなわち、エンジン1と動力分割機構5とがトルクを伝達することができるように連結されて、エンジンブレーキを作用させるように構成されている。なお、クラッチC0を係合させると変速部10は直結段になり、ブレーキB0を係合させたときよりも変速比が大きいので、要求される制動力が大きい場合には、クラッチC0が係合させられ、要求される制動力が小さい場合には、ブレーキB0が係合させられる。
各モータ・ジェネレータ2,3が動力を出力して走行するツインモータ走行モードは、二つのモータ・ジェネレータ2,3から動力を出力することができるので、主にシングルモータ走行モードよりも要求される駆動力が大きいときに設定される。ツインモータ走行モードは、第1モータ・ジェネレータ2と第2モータ・ジェネレータ3とが力行制御される。そして、第1モータ・ジェネレータ2から出力された動力を駆動力として伝達するために、動力分割機構5におけるキャリヤ9の回転が止められる。具体的には、キャリヤ9に連結された変速部10の回転を止めるために、クラッチC0とブレーキB0とが係合させられる。このようにクラッチC0とブレーキB0とを係合させてキャリヤ9の回転が止められると、図5に示す共線図のように、第1モータ・ジェネレータ2から出力されたトルクと反対方向のトルクがリングギヤ7に伝達される。また、動力分割機構5におけるギヤ比に応じて減速して第1モータ・ジェネレータ2から出力されたトルクがリングギヤ7から出力される。なお、後進走行時には、それぞれのモータ・ジェネレータ2,3の回転方向およびトルクの出力方向を反転させればよい。また、制動時には、それぞれのモータ・ジェネレータ2,3のトルクの出力方向を反転させることにより、各モータ・ジェネレータ2,3によって回生することができる。
さらに、図2に示す動力伝達装置を有する車両では、主にエンジン1から出力された動力によって走行するエンジン走行モードを設定することができる。具体的には、要求駆動力に応じてクラッチC0またはブレーキB0を係合することにより、エンジン1と動力分割機構5とを連結することにより、エンジン1から出力された動力を駆動輪に伝達することができる。このようにエンジン1から出力された動力を駆動輪に伝達する過程で、第1モータ・ジェネレータ2から反力を動力分割機構5に作用させる。そのときに、第1モータ・ジェネレータ2が出力しているトルクの方向と、第1モータ・ジェネレータ2の回転方向が反対のときには、第1モータ・ジェネレータ2に伝達された動力によって発電される。すなわち、動力分割機構5にエンジン1から伝達された動力の一部を電力に変換する。そのように第1モータ・ジェネレータ2によって回生されて発電された電力、あるいは蓄電装置に充電された電力を第2モータ・ジェネレータ3に供給してカウンタドリブンギヤ12に伝達する。すなわち、第1モータ・ジェネレータ2を回生制御することにより、動力分割機構5におけるサンギヤ6を反力要素として機能させてエンジン1から出力された動力を伝達するとともに、第2モータ・ジェネレータ3によってトルクを加算するように制御される。したがってこの場合の制御は、ハイブリッド駆動制御と言い得る。なお、図3には、エンジン走行モードを「HV」と示している。
また、第1モータ・ジェネレータ2は、通電される電流値やその周波数に応じて回転数を任意に制御することができる。そのため、第1モータ・ジェネレータ2の回転数を制御して、エンジン回転数を任意に制御することができる。具体的には、アクセル開度や車速などに応じてエンジン1の出力を定め、そのエンジン1の出力とエンジン1の燃費が良好になる最適燃費線とからエンジン1の運転点を定める。そして、第1モータ・ジェネレータ2の回転数を制御することで、エンジン回転数を燃費が良好となる最適燃費線上に制御することができる。すなわち、動力分割機構5は、電力によって制御可能な無段変速部として機能することができる。
一方、車速が比較的高車速になったときに、エンジン回転数を上記のように制御すると、第1モータ・ジェネレータ2が力行制御される場合がある。そのため、第1モータ・ジェネレータ2が力行制御されることを抑制もしくは防止するために、比較的高車速になったときに、変速部10の変速比を増速段に変更するように構成されている。すなわち、低速あるいは中速走行時には、クラッチC0を係合して変速部10を直結段に設定し、高速走行時には、ブレーキB0を係合して増速段に設定するように構成されている。図6には、変速部10を増速段に設定したときにおける変速部10の各回転要素および動力分割機構5の各回転要素の動作状態を示している。なお、エンジン走行モードによって後進走行する場合には、変速部10が直結段となるようにクラッチC0が係合させられる。また、制動時には、要求される制動力に応じてクラッチC0とブレーキB0とのいずれか一方が係合させられて、エンジンブレーキを作用させる。
つぎに、上記クラッチC0、ブレーキB0、各モータ・ジェネレータ、エンジン1を制御するための電子制御装置について説明する。図7にその電子制御装置のブロック図を示している。図7に示す電子制御装置は、走行のための全体的な制御を行うハイブリッド制御装置(HV−ECU)23と、各モータ・ジェネレータ2,3を制御するためのモータ・ジェネレータ制御装置(MG−ECU)24と、エンジン1を制御するためのエンジン制御装置(エンジン−ECU)25とが設けられている。これらの各制御装置23,24,25は、マイクロコンピュータを主体にして構成され、入力されたデータおよび予め記憶させられているデータを使用して演算を行い、その演算結果を制御指令信号として出力するように構成されている。その入力データの例を挙げると、ハイブリッド制御装置23には、車速、アクセル開度、第1モータ・ジェネレータ2の回転数、第2モータ・ジェネレータ3の回転数、前記リングギヤ7の回転数(出力軸回転数)、蓄電装置の充電容量(SOC)、図示しないマニュアルモードスイッチの出力信号、図示しないスポーツモードスイッチの出力信号、図示しないエンジンブレーキポジション(シフトレバー位置)の出力信号などがハイブリッド駆動装置23に入力されている。また、ハイブリッド駆動装置23から出力される指令信号の例を挙げると、第1モータ・ジェネレータ2のトルク指令値、第2モータ・ジェネレータ3のトルク指令値、エンジン1のトルク指令値、ならびにクラッチC0の制御油圧値(PC0)、ブレーキB0の制御油圧値(PB0)などがハイブリッド駆動装置23から出力されている。
なお、マニュアルモードとは、運転者が任意に変速比を設定することができるモードであって、図示しないスイッチを運転者が操作することにより設定される。また、スポーツモードとは、加速性やステアリング特性などを変更して走行性能をスポーティーにするモードであって、図示しないスイッチを運転者が操作することによりが設定される。さらに、エンジンブレーキポジションとは、下り坂路などを走行しているときにエンジンブレーキを作用させるときに設定されるものであり、具体的には、シフトレバーの位置に応じた信号によって定められる。
上記の第1モータ・ジェネレータ2のトルク指令値および第2モータ・ジェネレータ3のトルク指令値は、モータ・ジェネレータ制御装置24に制御データとして入力されており、モータ・ジェネレータ制御装置24はこれらのトルク指令値に基づいて演算を行って第1モータ・ジェネレータ2や第2モータ・ジェネレータ3の電流指令信号を出力するように構成されている。また、エンジントルク指令信号はエンジン制御装置25に制御データとして入力されており、エンジン制御装置25はそのエンジントルク指令信号に基づいて演算を行って電子スロットルバルブ(図示せず)に対してスロットル開度信号を出力し、また点火時期を制御する点火信号を出力するように構成されている。さらに、クラッチC0の制御油圧値(PC0)、ブレーキB0の制御油圧値(PB0)は、図示しない制御バルブなどに入力されるように構成されている。
上述したエンジン1および第1モータ・ジェネレータ2ならびに第2モータ・ジェネレータ3の動力性能もしくは駆動特性は互いに異なっている。例えばエンジン1は低トルクかつ低回転数の領域から高トルクかつ高回転数の領域までの広い運転領域で運転でき、またエネルギ効率はトルクおよび回転数がある程度高い領域で良好になる。これに対してエンジン1の回転数やエンジン1を停止させる際のクランク角度などの制御および駆動力の出力を行う第1モータ・ジェネレータ2は、低回転数で大きいトルクを出力する特性を備え、前記ドライブシャフト4にトルクを出力する第2モータ・ジェネレータ3は、第1モータ・ジェネレータ2よりも高回転数で運転でき、かつ最大トルクが第1モータ・ジェネレータ2よりも小さい特性を備えている。そこで、この発明で対象とする動力伝達装置は、駆動力源を構成している上記のエンジン1や各モータ・ジェネレータ2,3を有効に利用して、エネルギ効率あるいは燃費が良好になるように制御される。すなわち、上記エンジン走行モードと、ツインモータ走行モードと、シングルモータ走行モードとを任意に変更して走行させるように制御される。
具体的には、アクセル開度がある程度以上に大きい場合、あるいは車速がある程度以上の高車速の場合には、エンジン走行モードが実行される。すなわち、アクセル開度や車速などに応じて、クラッチC0とブレーキB0とのいずれか一方を係合させて、エンジン1と動力伝達機構5とのトルクの伝達を可能にする。これに対して、アクセル開度が小さいことにより要求駆動力Fが小さい場合には、エンジン1が停止されるとともに、クラッチC0とブレーキB0とが解放されて、シングルモータ走行モードが実行される。また、要求駆動力Fが、第2モータ・ジェネレータ3のみから出力することができる駆動力よりも大きく、かつ各モータ・ジェネレータ2,3からトルクを出力することができる駆動力以下の場合には、エンジン1が停止させられるとともに、クラッチC0とブレーキB0とが係合させられて、ツインモータ走行モードが実行される。なお、シングルモータ走行モードもしくはツインモータ走行モードは、蓄電装置に充電量が十分にあること、第2モータ・ジェネレータ3がトルクを出力できる状態になっていること、エンジン1を停止してもよい状態になっていることなどの条件が成立している場合に実行される。
そして、車両が走行している場合、登降坂路などの道路状況や交通量あるいは規制速度の変化などの走行環境に応じてアクセル操作が行われ、また車速が変化するから、それに伴って走行モードが切り替えられる。例えば、シングルモータ走行モード時にアクセル開度が増大させられた場合には、ツインモータ走行モードあるいはエンジン走行モードに切り替えられ、エンジン走行モード時にアクセル開度が減じられた場合には、ツインモータ走行モードあるいはシングルモータ走行モードに切り替えられる。これらの走行モードの切り替えのための制御は、前述した電子制御装置によって実行される。
この発明に係る制御装置は、走行モードを切り替えるときに係合させられる係合装置の入力側回転部材の回転数と出力側回転部材の回転数との差を予めなくすことにより、走行モードの切り替えを行うときの制御応答性を向上させるように構成されている。その一例としては、エンジン1と駆動輪とのトルクの伝達を遮断して第2モータ・ジェネレータ3から動力を出力して走行しているシングルモータ走行モードから、エンジン1と駆動輪とのトルクの伝達を可能にして走行するエンジン走行モードに切り替えるときの制御応答性を向上させるように構成されている。
図1は、その制御例を説明するためのフローチャートである。なお、図1に示すルーチンは、走行時に短時間毎に繰り返し実行されている。図1に示す制御例では、まず、モータ走行中か否かが判断される(ステップS1)。具体的には、シングルモータ走行モードが設定されて走行しているか否かが判断される。このステップS1は、ハイブリッド制御装置から出力される信号に基づいて判断することができ、具体的には、エンジン制御装置にエンジントルク指令値が出力されるか否かによって判断することができる。モータ走行中でなく、ステップS1で判断された場合にはリターンする。
それとは反対に、モータ走行中でありステップS1で肯定的に判断された場合には、マニュアルモードスイッチがONされているか否かを判断する(ステップS2)。このステップS2は、エンジンブレーキを作用させるなどエンジン1と動力分割機構5とのトルクの伝達を可能にさせる可能性が高いか否かを判断するためである。マニュアルモードスイッチがONされている場合には、運転者によってダウンシフトする操作が行われてその変速比に応じた制動力を作用させるためにエンジン1と動力分割機構5とのトルクの伝達を可能にさせることとなる。そのため、マニュアルモータスイッチがONされている場合には、エンジン1と動力分割機構5とのトルクの伝達を可能にさせる可能性が高く、ステップS2で肯定的に判断される。なお、このステップS2の判断では、スポーツモードスイッチがONされているか否か、あるいはエンジンブレーキポジションが設定されているか否かによって判断することができる。要はモータ走行中から要求駆動力が増大してエンジン走行モードに切り替えられる可能性があるか否かを判断することができればよく、したがって、アクセル操作の変化率に応じて判断してもよい。
マニュアルモードスイッチがONされていることにより、ステップS2で肯定的に判断された場合には、第1モータ・ジェネレータ2の回転数が制御される(ステップS3)。このステップS3における制御は、動力分割機構5におけるキャリヤ9の回転数を予め定めた所定の回転数に制御するものであって、具体的には、キャリヤ9の回転数がほぼ「0」になるように制御される。このステップS3は、変速部10の各回転要素同士の回転数の差を低下させるためのステップである。具体的には、クラッチC0やブレーキB0の入力側回転部材(例えばキャリヤ13またはサンギヤ16)の回転数と出力側回転部材(例えばサンギヤ16)の回転数との差がほぼ「0」になるように制御する。なお、シングルモータ走行モード時には、クラッチC0およびブレーキB0が解放されて変速部10がニュートラル状態になっているので、第1モータ・ジェネレータ2の出力トルクは、駆動力として作用することがない。
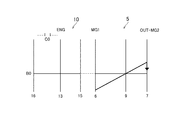
図8は、第2モータ・ジェネレータ3を回生制御して制動力を作用させているときに、第1モータ・ジェネレータ2の回転数を制御してキャリヤ9の回転数を「0」に制御した状態を示す共線図である。図8に示すように第1モータ・ジェネレータ2の回転数を制御してキャリヤ9の回転数が「0」になると、そのキャリヤ9に連結された変速部10におけるリングギヤ15の回転数が「0」になる。また、エンジン1が停止させられているので、エンジン1と連結されたキャリヤ13の回転数も「0」になる。その結果、クラッチC0とブレーキB0とが解放されている場合であっても、変速部10の各回転要素は、全て「0」になり、回転要素同士の回転数差、言い換えると、クラッチC0やブレーキB0の入力側回転部材の回転数と出力側回転部材の回転数とに差がなくなる。
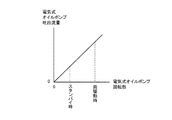
上記のようにステップS3で第1モータ・ジェネレータ2の回転数が制御されて、キャリヤ9の回転数がほぼ「0」になると、ついで、変速部10のスタンバイ制御が実行される(ステップS4)。具体的には、クラッチC0やブレーキB0の油圧をバッククリアランスが詰まるまで増大させる。言い換えると、クラッチC0やブレーキB0が係合してトルクを伝達する直前の油圧になるように、クラッチC0やブレーキB0の油圧が制御される。なお、このスタンバイ制御は、クラッチC0やブレーキB0に要求される油圧が、図9に示すようにそれらを係合させてトルクを伝達するときに要求される油圧よりも低いので、スタンバイ制御時における油圧の消費量を低下させることができる。すなわち、電動オイルポンプによって油圧を発生させている場合には、電動オイルポンプの回転数を低下させることができ、その結果、消費電力量を低下させることができる。そして、スタンバイ制御を実行した後は、リターンする。
一方、マニュアルモードスイッチがOFFされていることにより、ステップS2で否定的に判断された場合には、エンジン1を始動させる可能性が高いか否かを判断する(ステップS5)。具体的には、蓄電装置の充電容量が低下した場合などにエンジン1を始動させる可能性が高いと判断される。エンジン1を始動させる可能性が高いときには、上記のようにエンジン1と動力分割機構5とのトルクの伝達を可能にさせる可能性が高くなる。そのため、エンジン1を始動させる可能性が高く、ステップS5で肯定的に判断された場合には、第1モータ・ジェネレータ2の回転数を制御した後に(ステップS3)、変速部10のスタンバイ制御を実行してリターンする。
それとは反対に、エンジン1を始動させる可能性が低く、ステップS6で否定的に判断された場合は、第1モータ・ジェネレータ2の回転数を任意に設定して(ステップS6)、リターンする。なお、シングルモータ走行モードで走行しているとき、より具体的には、第2モータ・ジェネレータ3の動力のみによって駆動力を出力しているときには、第1モータ・ジェネレータ2の連れ回りによる動力損失を低減するために、第1モータ・ジェネレータ2の回転数は「0」にすることが好ましい。
上述したようにモータ走行時であってエンジン1と動力分割機構5とのトルクの伝達を可能にする可能性が高い場合に、クラッチC0とブレーキB0とをスタンバイ制御することにより、モータ走行からエンジン走行させるときにクラッチC0やブレーキB0の油圧を単に増大させて係合させればよく、あるいはそのように係合させた後に第1モータ・ジェネレータ2によってエンジン1をクランキングさせればよい。そのため、クラッチC0やブレーキB0を同期させる分の時間を短くすることができ、その結果、走行モードを切り替えるときの制御応答性を向上させることができる。
なお、上述した例では、シングルモータ走行モードからエンジン走行モードに切り替える可能性が高いときにスタンバイ制御を実行させる例を説明したが、シングルモータ走行モードからツインモータ走行モードに切り替える可能性が高い場合であっても同様の制御を実行することにより走行モードを切り替える制御の応答性を向上させることができる。具体的には、ツインモータ走行モードでは、クラッチC0とブレーキB0とを係合させることによって、第1モータ・ジェネレータ2の出力トルクを駆動力として伝達させるように構成されている。したがって、シングルモータ走行モードからツインモータ走行モードに切り替える場合には、クラッチC0とブレーキB0とを係合させることによって、ツインモータ走行モードに切り替えられる。そのため、シングルモータ走行モードからツインモータ走行モードに切り替える可能性が高いときに、クラッチC0およびブレーキB0の入力側回転部材の回転数と出力側回転部材の回転数との差をなくすように第1モータ・ジェネレータ2を制御することにより、走行モードを切り替えるときにおける制御応答性を向上させることができる。
また、上述した例では、エンジン1と動力分割機構5との間にクラッチC0とブレーキB0とのいずれか一方を係合させることによりエンジン1と動力分割機構5との動力の伝達を可能にする変速部10を備えた例を挙げて説明したが、エンジン1と動力分割機構5との間にクラッチを設け、あるいはそのクラッチに加えて出力軸14の回転を止めるブレーキを設けた動力伝達装置であってもよい。
さらに、動力分割機構や変速部は、ダブルピニオン型の遊星歯車機構によって構成されていてもよい。そして、クラッチやブレーキは、油圧によって制御されるものに限らず、電磁力などによって係合および解放が制御されるように構成されたものであってもよく、また、噛み合いクラッチなど摩擦力以外の力によってトルクを伝達するように構成されたものであってもよい。