JP6025346B2 - 検出装置、露光装置及びデバイスを製造する方法 - Google Patents
検出装置、露光装置及びデバイスを製造する方法 Download PDFInfo
- Publication number
- JP6025346B2 JP6025346B2 JP2012048611A JP2012048611A JP6025346B2 JP 6025346 B2 JP6025346 B2 JP 6025346B2 JP 2012048611 A JP2012048611 A JP 2012048611A JP 2012048611 A JP2012048611 A JP 2012048611A JP 6025346 B2 JP6025346 B2 JP 6025346B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- detector
- wafer
- mark
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7073—Alignment marks and their environment
- G03F9/7084—Position of mark on substrate, i.e. position in (x, y, z) of mark, e.g. buried or resist covered mark, mark on rearside, at the substrate edge, in the circuit area, latent image mark, marks in plural levels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/06—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness for measuring thickness ; e.g. of sheet material
- G01B11/0608—Height gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/41—Refractivity; Phase-affecting properties, e.g. optical path length
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70483—Information management; Active and passive control; Testing; Wafer monitoring, e.g. pattern monitoring
- G03F7/70605—Workpiece metrology
- G03F7/70616—Monitoring the printed patterns
- G03F7/70641—Focus
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
- G03F9/7023—Aligning or positioning in direction perpendicular to substrate surface
- G03F9/7026—Focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7049—Technique, e.g. interferometric
- G03F9/7053—Non-optical, e.g. mechanical, capacitive, using an electron beam, acoustic or thermal waves
- G03F9/7057—Gas flow, e.g. for focusing, leveling or gap setting
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
Description
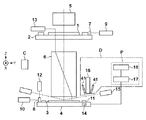
図3を用いて、被測定物の厚みと屈折率を用いて、基板(被測定物)3の裏面側のアライメントマーク(マーク)19を高速かつ高精度に計測する事が可能な露光装置について説明する。露光装置は、図1に示されるウエハアライメント検出器(第1検出器)16とウエハ3の表面位置を検出してウエハアライメント検出器16のベストフォーカス位置を検出する支援を行うフォーカス検出器(第2検出器)41とを含む検出装置を備えている。フォーカス検出器(第2検出器)41を以下「AF検出器」と呼ぶ。露光装置は、レチクルステージ2とウエハステージ(基板ステージ)4と照明光学系5と投影光学系6と制御部Cとをさらに備えている。レチクルステージ2は、レチクル(マスク)1を支持する。ウエハステージ4は、ウエハ(基板)3を支持する。照明光学系5は、レチクル1を露光光で照明する。投影光学系6は、露光光で照明されたレチクル1のパターン像をウエハステージ4に支持されたウエハ3に投影する。制御部Cは、露光装置全体の動作を統括制御する。
実施例1では、ウエハ3の表面位置を検出するフォーカス検出器41、67を用いて、ウエハ3の裏面に設けられたマーク19に対するウエハアライメント検出器16のフォーカス位置を迅速に取得した。実施例2では、ウエハアライメント検出器16として、第1検出モードと第2検出モードとの2つの検出モードに切り替え可能なものを使用する。また、実施例2では、実施例1で用いたウエハ3の表面位置を検出するフォーカス検出器41、67を用いない。ウエハアライメント検出器16は、第1検出モードで、マーク19との間隔を第1ピッチで変更しながら第1検出精度でマーク19を検出し、第2検出モードで、マーク19との間隔を第2ピッチで変更しながら第2検出精度でマーク19を検出する。そのとき、第2ピッチは第1ピッチより小さく、第2検出精度は第1検出精度より高い精度とする。すなわち、第1検出モードは、検出精度は低いが一度に広い領域を検出できるワイドピッチの検出モードである。一方、第2検出モードは、検出領域は狭いが検出精度が高いファインピッチの検出モードである。
実施例1では、ウエハ3の裏面側のマーク19を検出するためのウエハアライメント検出器16及びAF検出器41がともにウエハ3の表面側に配置されていた。しかし、ウエハ3の裏面側にウエハアライメント検出器16又はAF検出器41を配置することが可能な場合には、ウエハアライメント検出器16とAF検出器41をウエハ3の表面側と裏面側とに分離して配置することもできる。図19はウエハアライメント検出器16とAF検出器41との配置例を示した図である。(A)は、ウエハアライメント検出器16及びAF検出器41をともにウエハ3の表面側に配置した実施例1の配置例を示す。配置例(B)は、ウエハ3の裏面側のマーク19を検出する為に、赤外光を光源とするウエハアライメント検出器16をウエハ3の表面側に配置し、可視光を光源とするAF検出器41をウエハ3の裏面側に配置した配置例を示す。(C)は、ウエハ3の裏面側のマーク19を検出する為に、可視光を光源とするウエハアライメント検出器16をウエハ3の裏面側に配置し、赤外光を光源とするAF検出器41をウエハ3の表面側に配置した配置例を示す。
次に、デバイス(半導体デバイス、液晶表示デバイス等)の製造方法について説明する。半導体デバイスは、ウエハに集積回路を作る前工程と、前工程で作られたウエハ上の集積回路チップを製品として完成させる後工程を経ることにより製造される。前工程は、前述の露光装置を使用して感光剤が塗布されたウエハを露光する工程と、ウエハを現像する工程を含む。後工程は、アッセンブリ工程(ダイシング、ボンディング)と、パッケージング工程(封入)を含む。液晶表示デバイスは、透明電極を形成する工程を経ることにより製造される。透明電極を形成する工程は、透明導電膜が蒸着されたガラス基板に感光剤を塗布する工程と、前述の露光装置を使用して感光剤が塗布されたガラス基板を露光する工程と、ガラス基板を現像する工程を含む。本実施形態のデバイス製造方法によれば、従来よりも高品位のデバイスを製造することができる。以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。
Claims (12)
- 基板に設けられたマークを検出する検出装置であって、
前記基板の表面側から前記基板の表面側に設けられたマークと前記基板の裏面側に設けられたマークとを照明し、該照明された前記基板の表面側に設けられたマークの像と前記基板の裏面側に設けられたマークの像とを検出する第1検出器と、
前記基板の表面位置を検出する第2検出器と、
前記第2検出器により検出された表面位置から前記裏面側に設けられたマークに前記第1検出器のフォーカスを合わせるためのオフセット量を示す情報を取得する処理部と、
を備え、
前記オフセット量は、前記基板の厚さを前記基板の屈折率で割った値であり、
前記オフセット量に基づいて前記第1検出器の光軸の方向における前記第1検出器と前記基板との相対位置を調整することにより、前記裏面側に設けられたマークに前記第1検出器のフォーカスを合わせることを特徴とする検出装置。 - 前記基板の厚さの情報と前記基板の屈折率の情報とを入力する入力部を有し、
前記処理部は、入力された前記基板の厚さの情報と前記基板の屈折率の情報とを取得し、前記基板の厚さを前記基板の屈折率で割ることにより前記オフセット量を求める、ことを特徴とする請求項1に記載の検出装置。 - 前記第1検出器は、赤外光で前記裏面側に設けられたマークを照明することを特徴とする請求項1又は請求項2に記載の検出装置。
- 前記第2検出器は、前記基板の表面に斜入射させ、前記基板の表面で反射された光を検出することによって前記基板の表面位置を検出することを特徴とする請求項1乃至請求項3のいずれか1項に記載の検出装置。
- 前記第2検出器は、気体を前記基板の表面に向けて噴射し、前記基板の表面から跳ね返る気体の圧力を検出することによって前記基板の表面位置を検出することを特徴とする請求項1乃至請求項3のいずれか1項に記載の検出装置。
- 前記第2検出器は、前記基板の表面に電圧を印加したときに生じる電荷量を検出することによって前記基板の表面位置を検出することを特徴とする請求項1乃至請求項3のいずれか1項に記載の検出装置。
- 前記第2検出器は、前記裏面側に設けられたマークの像を検出することなく、前記基板の表面位置を検出することを特徴とする請求項1乃至請求項6のいずれか1項に記載の検出装置。
- 前記第2検出器は、前記基板の表面に光を投影する投影部と、前記表面で反射された反射光を受光する受光部と、を有し、
前記第2検出器は、前記受光部で受光された前記反射光の位置に基づいて前記基板の表面の位置を検出する、ことを特徴とする請求項4又は請求項7に記載の検出装置。 - 前記第2検出器により検出された前記基板の表面位置に基づいて、前記基板の表面に前記第1検出器のフォーカスが合うように前記第1検出器の光軸の方向における前記第1検出器と前記基板との相対位置を調整した後、前記基板の裏面に前記第1検出器のフォーカスが合うように、前記オフセット量だけ前記第1検出器の光軸の方向における前記第1検出器と前記基板との相対位置を調整する、ことを特徴とする請求項1乃至請求項8のいずれか1項に記載の検出装置。
- 基板を露光する露光装置であって、
前記基板に設けられたマーク又は前記基板に塗布されたレジストに設けられたマークを検出する請求項1乃至請求項9のいずれか1項に記載の検出装置と、
前記基板を保持する基板ステージと、
前記処理部により求められた前記情報に基づいて前記基板ステージを制御する制御部と、
を備えることを特徴とする露光装置。 - 前記処理部は、
前記第2検出器により検出された、ロットの1枚目の基板の表面位置から当該基板の裏面側に設けられたマークに前記第1検出器のフォーカスを合わせるためのオフセット量を示す情報を取得し、
前記情報と前記第2検出器により検出された前記ロットの2枚目以降の基板の表面位置とに基づいて、前記2枚目以降の基板の裏面側に設けられたマークに前記第1検出器のフォーカスを合わせるためのオフセット量を示す情報を取得する、
ことを特徴とする請求項10に記載の露光装置。 - デバイスを製造する方法であって、
請求項10又は請求項11に記載の露光装置を用いて基板を露光する工程と、
前記工程で露光された基板を現像する工程と、
を含むことを特徴とする方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012048611A JP6025346B2 (ja) | 2012-03-05 | 2012-03-05 | 検出装置、露光装置及びデバイスを製造する方法 |
| US13/762,476 US9523927B2 (en) | 2012-03-05 | 2013-02-08 | Exposure apparatus with detection apparatus for detection of upper and lower surface marks, and device manufacturing method |
| KR1020130018971A KR20130101458A (ko) | 2012-03-05 | 2013-02-22 | 검출 장치, 노광 장치, 및 디바이스 제조 방법 |
| CN201310062460.2A CN103309169B (zh) | 2012-03-05 | 2013-02-28 | 检测装置、曝光装置和制造器件的方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012048611A JP6025346B2 (ja) | 2012-03-05 | 2012-03-05 | 検出装置、露光装置及びデバイスを製造する方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013187206A JP2013187206A (ja) | 2013-09-19 |
| JP2013187206A5 JP2013187206A5 (ja) | 2015-04-23 |
| JP6025346B2 true JP6025346B2 (ja) | 2016-11-16 |
Family
ID=49043023
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012048611A Active JP6025346B2 (ja) | 2012-03-05 | 2012-03-05 | 検出装置、露光装置及びデバイスを製造する方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9523927B2 (ja) |
| JP (1) | JP6025346B2 (ja) |
| KR (1) | KR20130101458A (ja) |
| CN (1) | CN103309169B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11067908B2 (en) | 2019-02-14 | 2021-07-20 | Canon Kabushiki Kaisha | Measurement apparatus, exposure apparatus, and method of manufacturing article |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6150490B2 (ja) * | 2012-10-19 | 2017-06-21 | キヤノン株式会社 | 検出装置、露光装置、それを用いたデバイスの製造方法 |
| CN104950584B (zh) * | 2014-03-25 | 2018-01-30 | 上海微电子装备(集团)股份有限公司 | 成像对准系统 |
| DE102015209404B4 (de) * | 2015-05-22 | 2018-05-03 | Sirona Dental Systems Gmbh | Verfahren und Kamera zur dreidimensionalen Vermessung eines dentalen Objekts |
| JP6552312B2 (ja) * | 2015-07-16 | 2019-07-31 | キヤノン株式会社 | 露光装置、露光方法、およびデバイス製造方法 |
| JP6682263B2 (ja) * | 2015-12-25 | 2020-04-15 | キヤノン株式会社 | 検出装置、露光装置および物品の製造方法 |
| JP6812661B2 (ja) * | 2016-05-13 | 2021-01-13 | Toto株式会社 | 水栓装置 |
| JP6207671B1 (ja) * | 2016-06-01 | 2017-10-04 | キヤノン株式会社 | パターン形成装置、基板配置方法及び物品の製造方法 |
| JP6541733B2 (ja) * | 2017-09-06 | 2019-07-10 | キヤノン株式会社 | 基板配置方法 |
| KR102120551B1 (ko) * | 2018-09-14 | 2020-06-09 | (주)오로스 테크놀로지 | 오버레이 측정장치 |
| CN109188869B (zh) * | 2018-09-29 | 2020-08-28 | 宁波市效实中学 | 一种在不透明基底上制备微结构的方法 |
| JP2020122930A (ja) * | 2019-01-31 | 2020-08-13 | キヤノン株式会社 | 計測装置、露光装置及び物品の製造方法 |
| JP7278828B2 (ja) * | 2019-03-26 | 2023-05-22 | キヤノン株式会社 | 成形方法、成形装置、インプリント方法、および物品の製造方法 |
| DE102019206316A1 (de) * | 2019-05-03 | 2020-11-05 | Robert Bosch Gmbh | Optisches System, insbesondere LiDAR-System, und Fahrzeug |
| KR102273278B1 (ko) * | 2019-09-10 | 2021-07-07 | (주)오로스 테크놀로지 | 오버레이 측정장치 |
| JP7356667B2 (ja) | 2019-10-25 | 2023-10-05 | 国立大学法人秋田大学 | 位置合わせ装置 |
| US11784077B2 (en) | 2019-12-18 | 2023-10-10 | Micron Technology, Inc. | Wafer overlay marks, overlay measurement systems, and related methods |
| JP7446131B2 (ja) | 2020-03-12 | 2024-03-08 | キヤノン株式会社 | 検出装置、露光装置および物品製造方法 |
| KR102461662B1 (ko) * | 2020-07-02 | 2022-11-02 | (주)오로스 테크놀로지 | 오버레이 측정장치 |
| CN112908898B (zh) * | 2021-01-27 | 2022-09-02 | 长鑫存储技术有限公司 | 控片量测方法及量测装置 |
| TWI804401B (zh) * | 2022-07-28 | 2023-06-01 | 國立成功大學 | 光學量測系統 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5628245B2 (ja) * | 1975-03-19 | 1981-06-30 | ||
| JPS6165433A (ja) * | 1984-09-07 | 1986-04-04 | Canon Inc | 対物レンズの物体位置検出装置 |
| JPS61219045A (ja) * | 1985-03-25 | 1986-09-29 | Canon Inc | 距離算出装置および自動焦点合わせ装置 |
| US5114223A (en) | 1985-07-15 | 1992-05-19 | Canon Kabushiki Kaisha | Exposure method and apparatus |
| JPS6216526A (ja) | 1985-07-15 | 1987-01-24 | Canon Inc | 投影露光装置及びそれを用いたデバイス製造方法 |
| JPH06165433A (ja) | 1992-11-20 | 1994-06-10 | Toshiba Corp | モータ |
| JP2000294499A (ja) | 1999-04-09 | 2000-10-20 | Mitsubishi Electric Corp | 重ね合わせ精度向上方法および重ね合わせずれ量測定装置 |
| US6768539B2 (en) * | 2001-01-15 | 2004-07-27 | Asml Netherlands B.V. | Lithographic apparatus |
| JP3542346B2 (ja) * | 2001-12-18 | 2004-07-14 | 帝眞貿易株式会社 | 薄膜の膜厚測定方法及びその測定装置 |
| TW594431B (en) | 2002-03-01 | 2004-06-21 | Asml Netherlands Bv | Calibration methods, calibration substrates, lithographic apparatus and device manufacturing methods |
| JP2005005444A (ja) * | 2003-06-11 | 2005-01-06 | Nikon Corp | アライメント装置、露光装置、アライメント方法、露光方法及び位置情報検出方法 |
| JP2006242722A (ja) * | 2005-03-02 | 2006-09-14 | Nikon Corp | 位置計測方法、この位置計測方法を実施する位置計測装置、この位置計測方法を使用するデバイス製造方法、及びこの位置計測装置を装備する露光装置 |
| JP2007242707A (ja) * | 2006-03-06 | 2007-09-20 | Nikon Corp | 計測装置、パターン形成装置及びリソグラフィ装置 |
| JP5018004B2 (ja) | 2006-10-11 | 2012-09-05 | 株式会社ニコン | 顕微鏡、マーク検出方法、ウェハ接合装置、および、積層3次元半導体装置の製造方法 |
| JP5013921B2 (ja) | 2007-03-29 | 2012-08-29 | キヤノン株式会社 | 収差計測方法、露光装置及びデバイス製造方法 |
| JP4939304B2 (ja) * | 2007-05-24 | 2012-05-23 | 東レエンジニアリング株式会社 | 透明膜の膜厚測定方法およびその装置 |
| NL1036179A1 (nl) | 2007-11-20 | 2009-05-25 | Asml Netherlands Bv | Lithographic apparatus and method. |
| JP5406624B2 (ja) | 2009-08-10 | 2014-02-05 | キヤノン株式会社 | 検出装置、露光装置及びデバイスの製造方法 |
| JP5490462B2 (ja) * | 2009-08-17 | 2014-05-14 | 横河電機株式会社 | 膜厚測定装置 |
| CN102253603B (zh) | 2010-05-21 | 2013-05-22 | 上海微电子装备有限公司 | 一种用于光刻设备的对准探测装置 |
| JP5162006B2 (ja) | 2011-06-01 | 2013-03-13 | キヤノン株式会社 | 検出装置、露光装置、および、デバイスの製造方法 |
-
2012
- 2012-03-05 JP JP2012048611A patent/JP6025346B2/ja active Active
-
2013
- 2013-02-08 US US13/762,476 patent/US9523927B2/en active Active
- 2013-02-22 KR KR1020130018971A patent/KR20130101458A/ko active Search and Examination
- 2013-02-28 CN CN201310062460.2A patent/CN103309169B/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11067908B2 (en) | 2019-02-14 | 2021-07-20 | Canon Kabushiki Kaisha | Measurement apparatus, exposure apparatus, and method of manufacturing article |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103309169B (zh) | 2016-03-02 |
| CN103309169A (zh) | 2013-09-18 |
| JP2013187206A (ja) | 2013-09-19 |
| KR20130101458A (ko) | 2013-09-13 |
| US9523927B2 (en) | 2016-12-20 |
| US20130230798A1 (en) | 2013-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6025346B2 (ja) | 検出装置、露光装置及びデバイスを製造する方法 | |
| JP6150490B2 (ja) | 検出装置、露光装置、それを用いたデバイスの製造方法 | |
| JP5743958B2 (ja) | 計測方法、露光方法および装置 | |
| JP4944690B2 (ja) | 位置検出装置の調整方法、位置検出装置、露光装置及びデバイス製造方法 | |
| US20090225327A1 (en) | Position measurement apparatus, position measurement method, and exposure apparatus | |
| JP6366261B2 (ja) | リソグラフィ装置及び物品の製造方法 | |
| JP2002170754A (ja) | 露光装置、光学特性検出方法及び露光方法 | |
| KR101599577B1 (ko) | 노광 장치, 노광 장치의 제어 방법 및 디바이스 제조 방법 | |
| TWI358529B (en) | Shape measuring apparatus, shape measuring method, | |
| JP6226525B2 (ja) | 露光装置、露光方法、それらを用いたデバイスの製造方法 | |
| JP7418112B2 (ja) | パターン形成装置、及び物品の製造方法 | |
| JP7446131B2 (ja) | 検出装置、露光装置および物品製造方法 | |
| TWI813492B (zh) | 感測器裝置及用於微影量測之方法 | |
| JP6061912B2 (ja) | 計測方法、露光方法および装置 | |
| JP2002043211A (ja) | アライメント装置及び露光装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150304 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150304 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160205 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160405 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160912 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161011 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6025346 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |