JP6005630B2 - 連続フロー内視鏡システム - Google Patents
連続フロー内視鏡システム Download PDFInfo
- Publication number
- JP6005630B2 JP6005630B2 JP2013512219A JP2013512219A JP6005630B2 JP 6005630 B2 JP6005630 B2 JP 6005630B2 JP 2013512219 A JP2013512219 A JP 2013512219A JP 2013512219 A JP2013512219 A JP 2013512219A JP 6005630 B2 JP6005630 B2 JP 6005630B2
- Authority
- JP
- Japan
- Prior art keywords
- instrument
- sheath
- outer sheath
- bore
- internal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000012530 fluid Substances 0.000 claims description 69
- 238000003780 insertion Methods 0.000 claims description 23
- 230000037431 insertion Effects 0.000 claims description 23
- 238000005524 ceramic coating Methods 0.000 claims description 5
- 235000001674 Agaricus brunnescens Nutrition 0.000 claims 3
- 238000000576 coating method Methods 0.000 description 15
- 239000011248 coating agent Substances 0.000 description 13
- 230000006378 damage Effects 0.000 description 10
- 230000008878 coupling Effects 0.000 description 7
- 238000010168 coupling process Methods 0.000 description 7
- 238000005859 coupling reaction Methods 0.000 description 7
- 239000003989 dielectric material Substances 0.000 description 7
- 239000000919 ceramic Substances 0.000 description 6
- 230000006872 improvement Effects 0.000 description 6
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 5
- 239000000758 substrate Substances 0.000 description 5
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 4
- 238000003384 imaging method Methods 0.000 description 4
- 230000002262 irrigation Effects 0.000 description 4
- 238000003973 irrigation Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 239000011780 sodium chloride Substances 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 239000012212 insulator Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 239000000843 powder Substances 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- 210000003484 anatomy Anatomy 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 238000001816 cooling Methods 0.000 description 2
- 108010036922 cytoplasmic linker protein 115 Proteins 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 238000002955 isolation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 229920000642 polymer Polymers 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 210000002105 tongue Anatomy 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 239000004593 Epoxy Substances 0.000 description 1
- 229920002449 FKM Polymers 0.000 description 1
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 1
- 229920012192 Radel® R-5100 Polymers 0.000 description 1
- 239000004809 Teflon Substances 0.000 description 1
- 229920006362 Teflon® Polymers 0.000 description 1
- 229920006172 Tetrafluoroethylene propylene Polymers 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000011230 binding agent Substances 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 229910010293 ceramic material Inorganic materials 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 229910052731 fluorine Inorganic materials 0.000 description 1
- 239000011737 fluorine Substances 0.000 description 1
- 229920002313 fluoropolymer Polymers 0.000 description 1
- 239000004811 fluoropolymer Substances 0.000 description 1
- 239000004446 fluoropolymer coating Substances 0.000 description 1
- -1 for example Substances 0.000 description 1
- 239000003365 glass fiber Substances 0.000 description 1
- 229920006247 high-performance elastomer Polymers 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
Images







































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00112—Connection or coupling means
- A61B1/00119—Tubes or pipes in or with an endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00112—Connection or coupling means
- A61B1/00121—Connectors, fasteners and adapters, e.g. on the endoscope handle
- A61B1/00128—Connectors, fasteners and adapters, e.g. on the endoscope handle mechanical, e.g. for tubes or pipes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/015—Control of fluid supply or evacuation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1482—Probes or electrodes therefor having a long rigid shaft for accessing the inner body transcutaneously in minimal invasive surgery, e.g. laparoscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/149—Probes or electrodes therefor bow shaped or with rotatable body at cantilever end, e.g. for resectoscopes, or coagulating rollers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00011—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids
- A61B2018/00029—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids open
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00184—Moving parts
- A61B2018/00196—Moving parts reciprocating lengthwise
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/1206—Generators therefor
- A61B2018/1213—Generators therefor creating an arc
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2218/00—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2218/001—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body having means for irrigation and/or aspiration of substances to and/or from the surgical site
- A61B2218/002—Irrigation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2218/00—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2218/001—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body having means for irrigation and/or aspiration of substances to and/or from the surgical site
- A61B2218/007—Aspiration
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Description
本願は、その内容が、全ての目的のために、あたかも完全に本明細書中に挙げられるように、全体として本明細書中で参考として援用される、2010年5月28日に出願された米国仮特許出願第61/349,805号の利益およびそれに対する優先権を主張する。
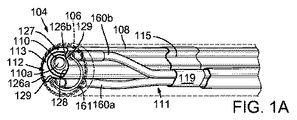
図1に示されるように、たとえば内視鏡等の器具100は、体の内腔を通してかつ/または切開部を通して(不図示)、患者の体内への挿入のために構成される中空の外側シース102を有することがある。中空の内側シース108は、外側シース102の内部に位置決めすることができ、1つまたは複数の内部器具を摺動自在に受け容れることができる。いくつかの例では、外側シース102の末端部分104、内側シース108の末端部分、または両方は、たとえばセラミック(図1Aおよび図1B)等の誘電材料106で被覆できる。先行技術のケースでのように、他の実施形態では、誘電体先端を、外側シース102の末端部分、内側シース108の末端部分、または両方の中に実装できる。
内視鏡100は、たとえば体の内腔の中への挿入のために構成される外側シース102を有することがある。外側シース102の近位端105は、以下により完全に説明されるように、作業要素130に回転自在に結合できる。
本明細書に開示されるいくつかの内側シース108は、外側シース102の中に摺動自在に受け容れられ、回転自在に結合できる。係る内側シース108は、中空本体108a(図35)を画定することができ、中空本体の中に少なくとも1つの内部器具(たとえば、テレスコープ110および/または電極111)を受け容れ、内部器具が、(図1に示される)引っ込められた近位位置と完全に伸張した遠位位置(不図示)との間で長手方向に前後に移動できるようにする。示されている内視鏡100では、内側シース108はテレスコープ110を摺動自在に収容し、流体(たとえば生理食塩水等のたとえば作動流体)を輸送するように構成される、遮られていない流域126a,126bを画定する。別の言い方をすれば、内側シース108は、内部器具110を受け容れ、器具によって十分に遮られていない少なくとも1つの流域126a,126bを離れ、作動流体の十分な流量が内部器具を迂回できるように構成される内部断面輪郭を有する。
上記のように、内視鏡100内に摺動自在に受け容れられ、標的部位を見るか、治療するか、かつ/またはそれ以外の場合操作するように構成される装置は、本明細書では内部器具と呼ばれている。係る内部器具は、細長いテレスコープ110として構成できる。図2に示されるように、テレスコープ110は、テレスコープの遠位端に位置決めされる対物レンズまたは他の集光構成要素110aを有することがある。光(もしくは画像信号を伝搬する電気信号または他の信号)は、テレスコープ110の遠位端からその近位端に、かつ/またはユーザが見ることができる画像(不図示)を生成するように構成される画像プロセッサに伝達できる。
上記のように、内側シース108の内部に位置決めされた内部器具110は、内側シースのボアの断面積の一部を遮り、それによって流体管112(図1A、図2A)として機能するために利用できる内側シースの利用可能な断面積を縮小する。きのこ形状の輪郭(図1A、図2A)を有する内側シース108は、作動流体が、内部器具110,111によって引き起こされる障害を迂回できるようにする対向するローブ126a,126bを提供する。内側シース108の遠位端の開口部は、標的部位に流入開口部113を提供し、作動流体の噴出114が、内側シースから排出されることを可能にできる。
作業要素130および関連する構成要素について、図4から図21を参照して、以下で説明する。作業要素130は、少なくともガイドレール132a,132b、アクチュエータブロック134、回転可能な要素150、シースアダプタ140、およびハンドル部分180を含む。先に簡略に説明されるように、作業要素130のいくつかの構成要素は、外側シース102を1つまたは複数の他の内視鏡構成要素に回転自在にかつ/または摺動自在に結合できる。本明細書に開示される革新的な作業要素は、たとえば4mmの外径を有するテレスコープ等の相対的に大きい内部器具を使用できる能力を保持しながら、外側シースの最も外側の直径を縮小する能力を含む、いくつかの優位点を提供する。
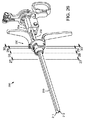
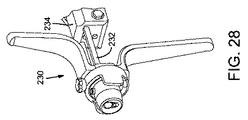
図25から図33は、開示されている作業要素の1つまたは複数の革新的な態様を組み込む器具200のための代替シース構成を示す。図4から図21に示される作業要素130と同様に、内部器具(不図示)は、互いに平行な作業要素230から遠位に伸張できる。
本明細書に開示される原理を組み込むと、通常は視界から遮られている領域を見るか、治療するか、またはそれ以外の場合操作するために構成される各種の器具を設計および構築することである。多くの係る器具は、以前に達成可能であったよりも、より小さいサイズとなり、それによって患者の損傷および先行技術の器具の他の関連する不利な点を軽減できる。例としてであって、制限としてではなく、開示されている器具は、腹腔鏡、ホロスコープ、気管支鏡、結腸鏡、ガストロスコープ、十二指腸鏡、S状結腸鏡、プッシュ小腸鏡、コレドコスコープ、膀胱鏡、子宮鏡、喉頭鏡、鼻喉頭鏡、胸腔鏡、尿管鏡、関節鏡、カンデラ、ニューロスコープ、オトスコープ、副鼻腔鏡を含む、内視鏡に使用できる。
102 外側シース
104 末端部分
105 近位端
106 誘電材料
107 挿入リミッタ
108 内側シース
108a 中空本体
108b 近位端
108c 遠位端
108d 中心領域
110 テレスコープ(内部器具)
110a 集光構成要素
111 電極(内部器具)
112 流体管
113 流体供給開口部
114 噴流
115 クリップ
116 外面
117 タング
118 内面
120 隙間
122 流体管(経路)
123 開口部
124 長手方向中心軸
126a,126b 遮られていない流域
127 凹状上部境界
128 凹状下部境界
129 凸状領域
130 作業要素
132,132a,132b ガイドレール
134 アクチュエータブロック
135 器具ボア
136 ガイドレールボア
140 シースアダプタ
140a 凹部領域
150 回転可能な要素(シースアダプタ)
151 グロメット
152 遠位端
153 本体
153a 肩部
153c ピン
153d 末端部分
153e ボア
154 リング
154a 内面
154b 遠位面
154c 外部螺条
155 ばね
155a 近位面
155b 内面
156 円錐体
156a,156b ボア
157 凹部
157a 経路
158 作動流体入口ボア
159 横断方向ボア
159a,159b ボア
160a,160b ワイヤ部分
161 陽極先端(電流を流すことができる要素)
164 近位端
165 単一接合管
166 接触領域
167 復帰接点
168 電力接点
169 電源線
170 絶縁体
172 第1の器具ボア
174 凹部
176 第2の器具ボア
177 近位面
178a,178b 凹部領域
179a,179b ボア
180 ハンドル部分
Claims (6)
- 長手方向軸線を画定し、患者の体内への挿入のために構成される中空の外側シースと、
第1の内部器具を摺動自在に受け容れるように構成される中空の内側シースであって、前記外側シースの内部で受け容れ可能な前記内側シースと、
少なくとも前記第1の内部器具および第2の内部器具を回転自在に支持し、少なくとも前記第1の内部器具および前記第2の内部器具が、前記外側シースの前記長手方向軸線に実質的に同一の広がりを持つ共通の回転軸の周りで回転可能であるように構成される作業要素と、
を備える内視鏡であって、
前記作業要素が、前記回転軸の長手方向に伸張する少なくとも1つのガイドレールと、前記ガイドレールに摺動自在に取り付け可能でかつ、前記少なくとも1つのガイドレールに沿った摺動に伴い前記外側シースから長手方向に前記内部器具のうちの少なくとも1つを動かすことができるよう前記第1の内部器具および前記第2の内部器具のうちの少なくとも1つに対して固定可能なアクチュエータブロックと、を備え、
前記内側シースが、前記作業要素から遠位に伸張し、前記第2の内部器具が、前記内側シースと前記外側シースとの間に位置決め可能であり、さらに、前記第2の内部器具が、前記内側シースを摺動係合するように構成されるクリップによって前記内側シースに移動できるように固定可能であり、かつ、前記内側シースは電極アセンブリの一部を配置可能とする凹凸状領域を有するきのこ形状の断面を有し、前記クリップが、前記内側シースとの摺動係合で位置決めされた、前記きのこ形状に対応する輪郭を有し、さらに、前記第2の内部器具が、前記内側シースと前記外側シースとの間で位置決め可能である電極アセンブリを備え、かつ、前記外側シースが、セラミックコーティングを備える末端部分を画定し、かつ、出口開口部によって画定される平面が、前記外側シースの前記長手方向軸線に平行ではない、内視鏡。 - 前記ガイドレールは、前記第1の内部器具に対して側面方向に位置する少なくとも2つのガイドレールからなり、さらに、前記作業要素が、前記第1の内部器具および前記第2の内部器具をそれぞれ封止状に受け容れる第1のボアおよび第2のボアを構成するグロメットをさらに備え、かつ、前記第1のボアが、前記第1の内部器具を圧迫するように構成される第1のリップ、および前記第2のボアが、前記第2の内部器具を圧迫するように構成される第2のリップを画定し、前記第1のリップが、前記第1のボアの外周から内向きに放射状に延在し、前記第2のリップが、前記第2のボアの外周から内向きに放射状に延在する、請求項1に記載の内視鏡。
- 中空の外側シースと、
前記外側シースの内部で、第1の内部器具を摺動自在に受け容れるように構成された中空の内側シースと、
前記外側シースと前記内側シースとの間に配置可能な第2の内部器具と、
前記第1および第2の内部器具に対して取り付け可能で、前記第1および第2の内部器具を長手方向に進退可能とするガイドレールを有するとともに前記外側シースに対して前記長手方向および回転方向に動作させるためのアクチュエータブロックを備えた作業要素と、
を備えた内視鏡であって、
前記第2の内部器具は遠位端に作業部分を有する電極アセンブリを備え、
前記内側シースは、前記電極アセンブリの一部を配置可能とする凹凸状領域を有するきのこ形状の断面を有し、
前記電極アセンブリを前記アクチュエータブロックの動作に伴い前記内側シースに沿って進退するよう、前記きのこ形状に対応する輪郭を備え、内側シースに対して内部器具を摺動可能に係合するクリップと、
前記外側シースの末端には、セラミックコーティングを有すると共に前記外側シースの軸方向に平行ではない出口開口部と、
を備えた内視鏡。 - 前記外側シースと前記アクチュエータブロックとの間には、互いに回動可能に連結されたアダプタと本体部を有する回転可能な領域が設けられ、
前記アダプタには、作動流体入口ボアが設けられるとともに、アダプタと本体部とを連結する部分には、前記作動流体入口ボアおよび前記内側シースの中空部に流体結合する、連結部分に沿って円周状に画定された凹部と、
を備えた請求項3に記載の内視鏡。 - 前記回転可能な領域と前記アクチュエータブロックとの間には、前記第1の内部器具と前記第2の内部器具とをそれぞれ封止状に受け容れるように第1のボアおよび第2のボアを構成するグロメットを、
備えた請求項4に記載の内視鏡。 - 前記第1のボアが、前記第1の内部器具を圧迫するように構成される第1のリップ、および前記第2のボアが、前記第2の内部器具を圧迫するように構成される第2のリップを画定し、前記第1のリップが、前記第1のボアの外周から内向きに放射状に延在し、前記第2のリップが、前記第2のボアの外周から内向きに放射状に延在する、
請求項5に記載の内視鏡。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US34980510P | 2010-05-28 | 2010-05-28 | |
| US61/349,805 | 2010-05-28 | ||
| PCT/US2011/037978 WO2011150111A1 (en) | 2010-05-28 | 2011-05-25 | Continuous flow endoscope system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013528073A JP2013528073A (ja) | 2013-07-08 |
| JP6005630B2 true JP6005630B2 (ja) | 2016-10-12 |
Family
ID=44511461
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013512219A Expired - Fee Related JP6005630B2 (ja) | 2010-05-28 | 2011-05-25 | 連続フロー内視鏡システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9474438B2 (ja) |
| EP (1) | EP2575650A1 (ja) |
| JP (1) | JP6005630B2 (ja) |
| CN (1) | CN102905635B (ja) |
| WO (1) | WO2011150111A1 (ja) |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2174602B1 (en) * | 2008-10-07 | 2012-09-19 | Neurendo B.V. | A minimal invasive neurosurgery assembly |
| JP6005630B2 (ja) | 2010-05-28 | 2016-10-12 | ジャイラス・エーシーエムアイ・インコーポレーテッド | 連続フロー内視鏡システム |
| US20120321259A1 (en) * | 2011-06-14 | 2012-12-20 | Luke Lu | Light-transmittable composite tube |
| US11291351B2 (en) * | 2011-08-19 | 2022-04-05 | Harold I. Daily | Hysteroscopes with curved tips |
| US8974441B2 (en) | 2012-01-18 | 2015-03-10 | Boston Scientific Scimed, Inc. | Adjustable device handle and related methods of use |
| US20130204083A1 (en) * | 2012-02-03 | 2013-08-08 | Arthrex, Inc. | Sheathless arthroscope and system |
| EP3016574B1 (en) * | 2013-09-26 | 2021-03-24 | Gyrus ACMI, Inc. (d.b.a.Olympus Surgical Technologies America) | Endoscope sheath arm |
| CN103479321A (zh) * | 2013-09-28 | 2014-01-01 | 韦锡波 | 动物用多功能电子内窥镜 |
| US20170303953A1 (en) * | 2014-09-12 | 2017-10-26 | Massachusetts Institute Of Technology | Surgical Instruments with Selectively Rotating Handles |
| US11272973B2 (en) * | 2015-01-28 | 2022-03-15 | Apyx Medical Corporation | Cold plasma electrosurgical apparatus with bent tip applicator |
| US10869716B2 (en) * | 2015-08-28 | 2020-12-22 | Covidien Lp | Powered bipolar resectoscope |
| CN105231980A (zh) * | 2015-09-10 | 2016-01-13 | 中南大学湘雅二医院 | 一种阴囊内腔诊断与电切手术一体镜 |
| US20170100190A1 (en) * | 2015-10-12 | 2017-04-13 | Mysore Wifiltronics PVT LTD | High performance material for electro-surgical vaporization electrodes |
| CN105250023B (zh) * | 2015-11-20 | 2018-11-20 | 珠海市司迈科技有限公司 | 一种具有新型密封结构的电切镜 |
| DE102016204047A1 (de) * | 2016-03-11 | 2017-09-14 | Olympus Winter & Ibe Gmbh | Resektoskop und Elektrodenanordnung dafür |
| CN105919548B (zh) * | 2016-05-20 | 2018-09-21 | 广州德米医用设备有限公司 | 一种带双通道的直肠诊疗镜 |
| US11864735B2 (en) * | 2016-05-26 | 2024-01-09 | Covidien Lp | Continuous flow endoscope |
| USD820444S1 (en) * | 2016-08-12 | 2018-06-12 | Karl Storz Gmbh & Co. Kg | Resectoscope shaft for cold enucleation |
| US10758301B2 (en) * | 2016-11-09 | 2020-09-01 | Boston Surgical and Endoscopic, LLC | Highly maneuverable disposable resectoscope |
| CN110139592B (zh) * | 2016-11-09 | 2022-02-01 | 俐娜医疗国际运营公司 | 在子宫镜检查中使用的装置 |
| GB201701012D0 (en) * | 2017-01-20 | 2017-03-08 | Ev Offshore Ltd | Downhole inspection assembly camera viewport |
| DE102017113069A1 (de) * | 2017-06-14 | 2018-12-20 | Olympus Winter & Ibe Gmbh | Transporteur eines Resektoskopes und Elektrodeninstrument |
| DE102017115377A1 (de) * | 2017-07-10 | 2019-01-10 | Karl Storz Se & Co. Kg | Arbeitselement eines Resektoskops sowie Resektoskop |
| FR3075031B1 (fr) * | 2017-12-18 | 2020-01-17 | Imv Technologies | Appareil d'aide a la penetration vaginale prevu pour recevoir un outil de travail |
| CN108042163A (zh) * | 2018-01-11 | 2018-05-18 | 上海市肺科医院 | 一种单孔胸腔镜手术的辅助器具 |
| US11529039B2 (en) * | 2018-05-08 | 2022-12-20 | Xenocor, Inc. | Non-conductive borescopes and related imaging techniques |
| AU2019275262B2 (en) * | 2018-05-21 | 2025-01-02 | Medivators Inc. | Cleaning adapter with and without safety tag |
| DE102018114448A1 (de) * | 2018-06-15 | 2019-12-19 | Olympus Winter & Ibe Gmbh | Resektoskop mit längsverschiebbar gelagertem Spülrohr |
| US20200107702A1 (en) * | 2018-10-04 | 2020-04-09 | PraesidioDyne, LLC | Dip Molded Disposable Endoscopic Sheaths |
| DE102018129904A1 (de) * | 2018-11-27 | 2020-05-28 | Olympus Winter & Ibe Gmbh | Resektoskop mit Elektrodeninstrument im Außenschaft |
| CN113453605B (zh) * | 2018-12-27 | 2024-07-16 | 奥林巴斯株式会社 | 电极单元及内窥镜系统 |
| CN110169817A (zh) * | 2019-05-31 | 2019-08-27 | 江苏美安医药股份有限公司 | 一种能够在内窥镜配合下进行可视手术的射频导管 |
| CN110123442B (zh) * | 2019-05-31 | 2024-06-11 | 珠海市司迈科技有限公司 | 一种电切镜操作手柄与电极的配合结构及配合方法 |
| EP4000542A4 (en) * | 2019-07-18 | 2023-04-12 | Gryshchuk, Bogdan Yaroslavovych | PROCEDURE FOR HIGH FREQUENCY RESECTION OF THE MENISCUS AND ARTHROSCOPIC INSTRUMENT FOR PERFORMING THE PROCEDURE (VARIATIONS) |
| EP3772318A1 (en) | 2019-08-06 | 2021-02-10 | Delmont Imaging SAS | Hysteroscope |
| DE102020118265A1 (de) | 2020-07-10 | 2022-01-13 | Karl Storz Se & Co. Kg | Medizinisches Instrument und elektrochirurgisches System |
| PL132217U1 (pl) * | 2020-07-17 | 2024-12-16 | Gryshchuk Bogdan Yaroslavovych | Artroskopowe narzędzie do resekcji łąkotki prądem o częstotliwości radiowej (Warianty) |
| CN112656359B (zh) * | 2020-12-17 | 2022-02-08 | 上海宇度医学科技股份有限公司 | 通道密封阀、通道密封机构及全能宫腔镜 |
| DE102021132426A1 (de) * | 2021-12-09 | 2023-06-15 | Karl Storz Se & Co. Kg | Verbindungsvorrichtung für chirurgische Instrumente sowie chirurgisches Instrument und Verfahren |
| CN114560686B (zh) * | 2022-03-24 | 2023-01-17 | 东莞市西陶精密陶瓷有限公司 | 一种陶瓷方孔管及其制备方法和应用 |
| US11648048B1 (en) * | 2022-04-21 | 2023-05-16 | American Endoscopic Innovations, LLC | Resectoscope systems and methods |
| DE102023107417A1 (de) | 2023-03-23 | 2024-09-26 | Olympus Winter & Ibe Gmbh | Resektoskop |
| CN116350157A (zh) * | 2023-04-23 | 2023-06-30 | 上海宇度医学科技股份有限公司 | 一种内窥镜 |
| CN116807580A (zh) * | 2023-04-26 | 2023-09-29 | 上海宇度医学科技股份有限公司 | 一种集成切割装置的内窥镜 |
Family Cites Families (74)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2487502A (en) * | 1945-09-26 | 1949-11-08 | American Cystoscope Makers Inc | Instrument for electrosurgical resection |
| US3186924A (en) * | 1961-10-12 | 1965-06-01 | American Mach & Foundry | Flash evaporator |
| US3834842A (en) | 1971-12-06 | 1974-09-10 | Hydraulic Prod Inc | Hydraulic power translating device |
| US3835842A (en) | 1972-07-03 | 1974-09-17 | J Iglesias | Endoscope with continuous irrigation |
| US3850175A (en) | 1972-07-03 | 1974-11-26 | J Lglesias | Resectoscope with continuous irrigation |
| GB1452292A (en) * | 1973-09-20 | 1976-10-13 | Iglesias J J | Urological endoscopic instrument solid state thermal overload indicator |
| US4132227A (en) * | 1974-08-08 | 1979-01-02 | Winter & Ibe | Urological endoscope particularly resectoscope |
| US4066330A (en) | 1976-06-14 | 1978-01-03 | Karl Storz Endoscopy-America, Inc. | Coupler for joining optical devices |
| US4149538A (en) * | 1977-08-15 | 1979-04-17 | American Hospital Supply Corporation | Resectoscope electrode assembly with non-conductive bearing tube and method of making the same |
| JPS56113501A (en) | 1980-02-15 | 1981-09-07 | Dainippon Printing Co Ltd | Method of sterilizing germless chamber in germless filling machine |
| JPS5881029A (ja) * | 1981-11-06 | 1983-05-16 | オリンパス光学工業株式会社 | レゼクトスコ−プ |
| JPS61159953A (ja) * | 1985-01-08 | 1986-07-19 | オリンパス光学工業株式会社 | 前立腺切除装置 |
| DE3603758A1 (de) | 1985-02-09 | 1986-08-14 | Olympus Optical Co., Ltd., Tokio/Tokyo | Resektoskopgeraet |
| JPS61185239A (ja) * | 1985-02-09 | 1986-08-18 | オリンパス光学工業株式会社 | レゼクトスコ−プ装置 |
| JPS62144630A (ja) * | 1985-12-20 | 1987-06-27 | オリンパス光学工業株式会社 | 硬性内視鏡用シ−ス |
| JPS63135158A (ja) * | 1986-11-27 | 1988-06-07 | オリンパス光学工業株式会社 | 回転レゼクトスコ−プ |
| DE3714170A1 (de) | 1987-04-28 | 1988-11-10 | Storz Karl Gmbh & Co | In einen endoskop-schaft einsetzbares instrument |
| US4867138A (en) * | 1987-05-13 | 1989-09-19 | Olympus Optical Co., Ltd. | Rigid electronic endoscope |
| US4769018A (en) | 1987-07-15 | 1988-09-06 | Storz Instrument Company | Cannula assembly |
| US4919129A (en) * | 1987-11-30 | 1990-04-24 | Celebration Medical Products, Inc. | Extendable electrocautery surgery apparatus and method |
| US4920961A (en) * | 1988-06-02 | 1990-05-01 | Circon Corporation | System for disconnetably mounting an endoscope sheath with an endoscope tool |
| JP2604031B2 (ja) * | 1989-02-28 | 1997-04-23 | オリンパス光学工業株式会社 | レゼクトスコープ装置 |
| US5112330A (en) * | 1988-09-16 | 1992-05-12 | Olympus Optical Co., Ltd. | Resectoscope apparatus |
| US4959058A (en) | 1989-03-17 | 1990-09-25 | Michelson Gary K | Cannula having side opening |
| DE3921233A1 (de) | 1989-06-28 | 1991-02-14 | Storz Karl Gmbh & Co | Endoskop mit einer am distalen ende angeordneten videoeinrichtung |
| JPH03295550A (ja) * | 1990-04-12 | 1991-12-26 | Olympus Optical Co Ltd | レゼクトスコープ装置 |
| KR920010383B1 (ko) | 1990-10-23 | 1992-11-27 | 삼성전자 주식회사 | 방송신호 직접 수신회로 |
| DE4101472C2 (de) * | 1991-01-19 | 1995-07-13 | Winter & Ibe Olympus | Endoskop zur transurethralen Resektion |
| US5662647A (en) | 1991-07-22 | 1997-09-02 | Transamerican Technologies International | Electrode assembly for electrosurgical instrument |
| US5976129A (en) | 1991-10-18 | 1999-11-02 | Desai; Ashvin H. | Endoscopic surgical instrument |
| US5322503A (en) | 1991-10-18 | 1994-06-21 | Desai Ashvin H | Endoscopic surgical instrument |
| US5662680A (en) | 1991-10-18 | 1997-09-02 | Desai; Ashvin H. | Endoscopic surgical instrument |
| US5197964A (en) | 1991-11-12 | 1993-03-30 | Everest Medical Corporation | Bipolar instrument utilizing one stationary electrode and one movable electrode |
| US5197963A (en) * | 1991-12-02 | 1993-03-30 | Everest Medical Corporation | Electrosurgical instrument with extendable sheath for irrigation and aspiration |
| JP3216656B2 (ja) * | 1992-01-24 | 2001-10-09 | オリンパス光学工業株式会社 | 内視鏡挿入補助具 |
| US5320091A (en) * | 1992-04-27 | 1994-06-14 | Circon Corporation | Continuous flow hysteroscope |
| US5392765A (en) * | 1993-02-11 | 1995-02-28 | Circon Corporation | Continuous flow cystoscope |
| GB2283068B (en) * | 1993-10-22 | 1997-09-10 | Taylor Kerr | Pipe coupling |
| DE9318282U1 (de) * | 1993-11-30 | 1994-01-20 | Richard Wolf Gmbh, 75438 Knittlingen | Endoskopisches Instrument |
| US5458598A (en) | 1993-12-02 | 1995-10-17 | Cabot Technology Corporation | Cutting and coagulating forceps |
| US5486155A (en) * | 1994-07-15 | 1996-01-23 | Circon Corporation | Rotatable endoscope sheath |
| US5505710A (en) * | 1994-08-22 | 1996-04-09 | C. R. Bard, Inc. | Telescoping probe |
| US5569244A (en) * | 1995-04-20 | 1996-10-29 | Symbiosis Corporation | Loop electrodes for electrocautery probes for use with a resectoscope |
| DE19520277C1 (de) * | 1995-06-02 | 1996-11-21 | Winter & Ibe Olympus | Endoskopisches Instrument |
| JP3655691B2 (ja) * | 1996-03-28 | 2005-06-02 | オリンパス株式会社 | レゼクトスコープ |
| US5807240A (en) * | 1996-09-24 | 1998-09-15 | Circon Corporation | Continuous flow endoscope with enlarged outflow channel |
| US5857962A (en) * | 1997-03-13 | 1999-01-12 | Circon Corporation | Resectoscope with curved electrode channel and resiliently deflectable electrode section |
| US5934682A (en) * | 1997-05-19 | 1999-08-10 | Fel-Pro Incorporated | Head gasket with preflattened wire rings and method of making and using same |
| US6579224B1 (en) | 1999-10-11 | 2003-06-17 | Uromedica, Inc. | Apparatus and method for inserting an adjustable implantable genitourinary device |
| JP3429685B2 (ja) * | 1997-10-06 | 2003-07-22 | オリンパス光学工業株式会社 | 内視鏡案内管 |
| AU2206399A (en) | 1997-12-22 | 1999-07-12 | Micrus Corporation | Variable stiffness fiber optic shaft |
| DE19802145C1 (de) | 1998-01-22 | 1999-09-30 | Storz Karl Gmbh & Co | Medizinisches Schiebeschaftinstrument |
| US5972002A (en) | 1998-06-02 | 1999-10-26 | Cabot Technology Corporation | Apparatus and method for surgical ligation |
| US6641530B2 (en) | 1998-12-14 | 2003-11-04 | Fuji Photo Optical Co., Ltd. | Endoscope with objective lens drive mechanism |
| US6471684B2 (en) | 1999-04-30 | 2002-10-29 | Appied Medical Resources Corporation | Ureteral access sheath |
| US6358200B1 (en) * | 1999-09-01 | 2002-03-19 | Circon Corporation | Continuous flow resectoscope with single tube sheath assembly and rotatable connection |
| AU7381900A (en) | 1999-09-24 | 2001-04-30 | Omnisonics Medical Technologies, Inc. | Variable stiffness medical device |
| DE10004264C2 (de) | 2000-02-01 | 2002-06-13 | Storz Karl Gmbh & Co Kg | Vorrichtung zur intrakorporalen, minimal-invasiven Behandlung eines Patienten |
| JP3297033B2 (ja) | 2000-02-02 | 2002-07-02 | オリンパス光学工業株式会社 | 内視鏡 |
| DE10042097C1 (de) * | 2000-08-26 | 2001-12-20 | Winter & Ibe Olympus | Urologisches Resektoskop |
| DE10056618B4 (de) | 2000-11-15 | 2015-10-01 | Olympus Winter & Ibe Gmbh | Doppelschaftendoskop zur Dauerspülung |
| US20030220542A1 (en) * | 2000-12-15 | 2003-11-27 | Amir Belson | Obstetrical imaging system and integrated fetal vacuum extraction system |
| US6712759B2 (en) | 2002-01-07 | 2004-03-30 | Acmi Corporation | Outflow system for an endoscope |
| EP1338236B1 (en) * | 2002-02-25 | 2005-08-17 | Olympus Corporation | Endoscope apparatus with cooling means |
| DE10310614B4 (de) * | 2002-03-25 | 2007-10-11 | Richard Wolf Gmbh | Resektoskop |
| DE10242608A1 (de) * | 2002-09-12 | 2004-04-01 | Olympus Winter & Ibe Gmbh | Resektoskop mit abkuppelbarem Außenschaft |
| DE10248836A1 (de) * | 2002-10-19 | 2004-05-06 | Olympus Winter & Ibe Gmbh | Resektoskop mit positionierter Optik |
| DE10248839A1 (de) * | 2002-10-19 | 2004-05-06 | Olympus Winter & Ibe Gmbh | Urologisches Resektoskop mit drehgesichertem Instrumententräger |
| US8235968B2 (en) | 2004-04-13 | 2012-08-07 | Gyrus Acmi, Inc. | Atraumatic ureteral access sheath |
| DE202004014828U1 (de) * | 2004-09-21 | 2004-12-02 | Richard Wolf Gmbh | Endoskopisches Instrument |
| JP2008093019A (ja) | 2006-10-06 | 2008-04-24 | Olympus Medical Systems Corp | レゼクトスコープ |
| EP2269516B1 (en) * | 2009-06-29 | 2013-01-02 | National Cancer Center | Surgical apparatus for transanal endoscopic microsurgery |
| US8465421B2 (en) | 2009-12-14 | 2013-06-18 | C2Cure Inc. | Endoscope with an improved working channel |
| JP6005630B2 (ja) | 2010-05-28 | 2016-10-12 | ジャイラス・エーシーエムアイ・インコーポレーテッド | 連続フロー内視鏡システム |
-
2011
- 2011-05-25 JP JP2013512219A patent/JP6005630B2/ja not_active Expired - Fee Related
- 2011-05-25 WO PCT/US2011/037978 patent/WO2011150111A1/en active Application Filing
- 2011-05-25 CN CN201180025395.5A patent/CN102905635B/zh not_active Expired - Fee Related
- 2011-05-25 US US13/115,855 patent/US9474438B2/en not_active Expired - Fee Related
- 2011-05-25 EP EP11725254.4A patent/EP2575650A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| EP2575650A1 (en) | 2013-04-10 |
| WO2011150111A1 (en) | 2011-12-01 |
| US20110295066A1 (en) | 2011-12-01 |
| CN102905635B (zh) | 2015-09-09 |
| CN102905635A (zh) | 2013-01-30 |
| US9474438B2 (en) | 2016-10-25 |
| JP2013528073A (ja) | 2013-07-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6005630B2 (ja) | 連続フロー内視鏡システム | |
| EP2830478B1 (en) | Integrated endoscope irrigation | |
| US10182707B2 (en) | Fluid channeling component of a multi-camera endoscope | |
| US9713415B2 (en) | Multi camera endoscope having a side service channel | |
| US11882997B2 (en) | Integrated endoscope irrigation | |
| US9814374B2 (en) | Flexible electronic circuit board for a multi-camera endoscope | |
| JP6568648B2 (ja) | 医療デバイス及び方法 | |
| US20130150674A1 (en) | Thoracic scope port sponge cleaner | |
| US11172955B2 (en) | Endoscopy system and related methods | |
| US20190174998A1 (en) | Endoscope with secondary working channel | |
| US12042129B2 (en) | Stopcock for an endoscope | |
| US11234579B2 (en) | Resectoscope and electrode assembly therefor | |
| CN211674160U (zh) | 一种3d胃肠镜 | |
| US20200367736A1 (en) | Endoscope with secondary working channel | |
| US20190231417A1 (en) | Flow sheath, retractor tool, and electrode of a resectoscope | |
| JP2022509229A (ja) | 外側シャフトに電極器具を有するレゼクトスコープ | |
| JP6874001B2 (ja) | 医療装置および使用方法 | |
| US20210298583A1 (en) | Endoscope with secondary working channel | |
| CN117838298A (zh) | 经尿道汽化吸引镜 | |
| Levine | Hysteroscopic instruments | |
| IT201900019840A1 (it) | Dispositivo biomedicale per la frantumazione dei calcoli renali | |
| IT201900003842U1 (it) | Dispositivo biomedicale per la frantumazione dei calcoli renali |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140417 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150309 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160907 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6005630 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |