JP5824209B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP5824209B2 JP5824209B2 JP2010274915A JP2010274915A JP5824209B2 JP 5824209 B2 JP5824209 B2 JP 5824209B2 JP 2010274915 A JP2010274915 A JP 2010274915A JP 2010274915 A JP2010274915 A JP 2010274915A JP 5824209 B2 JP5824209 B2 JP 5824209B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- unit
- recording medium
- time
- image forming
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Landscapes
- Fixing For Electrophotography (AREA)
- Exposure Or Original Feeding In Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
Description
記録媒体を給紙する給紙手段と、
記録媒体を検知する検知手段と、
画像の書き出し開始を示す信号を出力する信号出力手段と、
外部機器から受信した画像形成ジョブデータを展開して第1画像データを求め、前記第1画像データが余白を示す情報であるか否かに基づき記録媒体の搬送方向の先端側の余白部を除いた第2画像データを生成する画像データ生成手段と、
前記画像の書き出し開始を示す信号が入力されると、前記第2画像データを出力する画像データ出力手段と、
前記画像データ出力手段が出力した前記第2画像データに対応した画像を形成する画像形成手段と、
前記記録媒体の搬送方向の先端側から前記第2画像データの開始位置の手前までの搬送方向の長さを前記余白部の搬送方向の長さとして算出する算出手段と、
前記画像形成手段を起動してから前記画像形成手段が安定した状態に移行するまでの移行時間から、前記算出手段により算出された前記余白部の搬送方向の長さに対応した第1搬送時間と、前記給紙手段が給紙を開始したタイミングから前記検知手段が記録媒体を検知したタイミングまでの第2搬送時間とを減算することで初期時間を決定する決定手段と、
前記画像形成手段を起動したタイミングから前記初期時間が経過したタイミングで前記給紙手段による給紙を開始させる制御手段と
を備えることを特徴とする画像形成装置を提供する。
図1、図2を用いて実施例1における画像形成装置について説明する。図1において、画像形成装置100は、外部機器の一例であるホストコンピュータ101から画像を形成するためのジョブデータを受信して記録媒体に画像を形成する。画像形成装置100は、印刷装置、プリンター、複写機、複合機、ファクシミリのいずれであってもよい。また、記録媒体は、記録材、用紙、シート、転写材、転写紙と呼ばれることもある。ジョブデータは、画像データや印刷命令を含んでいる。ホストコンピュータ101は、パーソナルコンピュータ、携帯情報端末(PDA)、デジタルカメラなどのいずれであってもよい。
図3に示したフローチャートを用いて、プリントコントローラ120がホストコンピュータ101から印刷指示を受けた際に実行する画像形成処理について説明する。CPU102が実行するプログラムは不図示のROMに格納されているものとする。
ここで、nは余白に相当するライン数であり、wは1ライン当たりの幅である。このように、CPU102は、画像形成ジョブデータから余白部の搬送方向における長さ(d4)を判別する判別手段として機能する。
図5を用いて、画像形成エンジン130が記録媒体に画像を形成する際に不図示のROMに格納されたプログラムにしたがってCPU106が実行する画像形成処理について説明する。ここで、図5に示した画像形成処理は、プリントコントローラ120から印刷指示コマンドを受信した際にCPU106によって開始される。
S506にて実行される給紙制御の流れを、図6、図7を用いて詳細に説明する。S601で、CPU106は、スキャナモータ117を起動してからその回転数が目標回転数に到達して安定するまでの時間T0をRAM104またはROMから取得する。RAM104やROMは、移行時間(T0)を記憶した記憶手段として機能する。この時間T0は、工場出荷時に実験により取得されてもよいし、シミュレーションによって算出されてもよい。あるいは、画像を形成していないタイミングで、CPU106は、スキャナモータ117を起動してから、回転数センサ121により計測した回転数が目標回転数に到達して安定するまでの時間T0を、内部タイマーを用いて測定してもよい。あるいは、CPU106が、スキャナモータ117を起動してから任意のタイミングで回転数センサ121により回転数Rxを計測するとともに、スキャナモータ117の起動から計測したタイミングまでの時間Txを計測する。さらに、CPU106は、目標回転数Rt、回転数Rxおよび時間Txを関数に代入することで、スキャナ起動時間T0を算出してもよい。この関数の一例は以下のとおりである。
T0 = (Tx/Rx)×Rt
このように、スキャナ起動時間T0は、露光手段を起動してから露光手段が安定した状態に移行するまでの移行時間である。
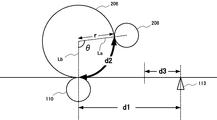
さらに、TOPセンサ113を通過してから感光ドラム206上に現像ローラ208がトナー画像を描き始めるまでに記録媒体が搬送方向に進む距離をd3とする。CPU106は、次式により距離d3を算出する。距離d1と、距離d2は、RAM104またはROMにあらかじめ格納されているものとする。また、距離d3自体をRAM104またはROMにあらかじめ格納しておいてもよい。
CPU106は、RAM104またはROMから読み出した距離d3と、ビデオインターフェイス制御回路119より取得した余白データ量とから時間TBを取得する。たとえば、CPU106は、以下の式を用いて時間TBを算出する。
= (d1−d2+d4)/v
ここで、vは記録媒体の搬送速度[mm/sec]であり、d4は余白データ量[mm]である。余白データ量d4を加算するのは余白に応じて給紙のタイミングを前倒しするためである。つまり、転写位置を記録媒体上の余白部が通過している際には、まだ、スキャナモータ117が安定していないおそれがあるが、余白部が転写位置を通過したタイミングではスキャナモータ117が安定している。これにより、ファーストプリントアウトタイムを短縮しつつ、画像の形成位置の精度も維持できる。このように、CPU106は、距離(d1)から距離(d2)を減算して得られた差の距離(d3)に対して、余白部の搬送方向における長さ(d4)を加算して和を算出する手段として機能する。ここで、距離(d1)は搬送路における検知手段が記録媒体を検知する検知位置から像担持体と転写手段とが形成するニップ部の中心までの距離である。距離(d2)は、像担持体の周面上の距離であって像担持体に現像手段が現像剤を付与する現像位置からニップ部の中心までの距離である。さらに、CPU106は、和を、記録媒体の搬送速度(v)で除算することで、第1搬送時間(TB)を算出する手段として機能する。また、CPU106は、余白部の搬送方向における長さと、搬送路における記録媒体の搬送速度(v)とから第1搬送時間(TB)を算出する手段として機能する。
このように、CPU106は、移行時間(T0)から第1搬送時間(TB)と第2搬送時間(TA)とを減算することで初期時間(TS)を決定する決定手段として機能する。ここで、移行時間(T0)は、画像形成手段を起動してから画像形成手段が安定した状態に移行するまでの移行時間である。第1搬送時間(TB)は、搬送方向で記録媒体の先頭に形成される余白部の搬送方向における長さに対応した搬送時間である。第2搬送時間(TA)は、給紙手段が給紙を開始したタイミングから検知手段が記録媒体を検知したタイミングまでの第2搬送時間である。また、CPU106は、初期時間(TS)を決定する際に、記憶手段から第2搬送時間(TA)および移行時間(T0)を読み出して使用する決定手段として機能する。
S507にて実行される画像形成処理の流れを、図9を用いて説明する。S901で、CPU106は、TOPセンサ113が記録媒体の先端を検知したかどうか判定する。TOPセンサ113が記録媒体の先端を検知すると、S902に進む。
実施例1は、スキャナモータ117が目標回転数で安定したタイミングに合わせて、実画像を書き出すように記録媒体を給紙搬送する発明である。しかし、スキャナモータ117や定着器の性能に依存して、スキャナモータ117の起動時間よりも定着器の起動時間の方が遅い場合がある。その場合、定着器の起動時間がFPOTを制限することになる。そこで、実施例3では、定着器の温度が目標温度に到達したタイミングに合わせて、定着器で記録媒体に実画像を定着するよう搬送制御をすることでFPOTの短縮をする。なお、実施例2において、実施例1と共通する事項については、説明の簡潔化を図るために省略することとする。つまり、図5のS506にて実行される給紙制御の部分だけが実施例1と実施例2とでは異なるにすぎないため、この部分を中心に説明する。
実施例2にかかる給紙制御の流れを、図10、図11を用いて詳細に説明する。図10のS1001で、CPU106は、定着器のヒータを起動して定着ローラ212を暖め始めてから、定着ローラ212の温度が目標温度に到達するまでの時間Tfを求める。なお、CPU102は、サーミスタ112を用いて、画像形成が指示されたときの定着手段の温度(Cx)を測定する。よって、サーミスタ112は測定手段として機能する。時間Tfは、ヒータによる加熱を開始したときの定着ローラ212の初期温度Cxに応じて異なる。そこで、CPU106は、ヒータを起動してから任意の第1のタイミングで定着ローラ212の途中温度C1と、さらに別の第2のタイミングで定着ローラ212の途中温度C2を計測する。つまり、CPU102は、定着手段が起動した後で、測定手段は、第1のタイミングにおける定着手段の第1温度(C1)を測定するとともに、第2のタイミングにおける定着手段の第2温度(C2)を測定する。また、CPU106は、途中温度C1を計測したタイミングから途中温度C2を計測したタイミングまでの経過時間T1を内部タイマーまたはカウンタにより計測する。さらに、CPU106は、経過時間T1と、途中温度C1,C2とから、定着ローラ212の温度が初期温度Cxから目標温度Ctに到達するまでの時間(定着起動時間Tf)を求める。
β=T1/(C2−C1)
ここで、定着起動時間Tfは、定着手段を起動してから定着手段が安定した状態に移行するまでの移行時間である。また、βは、温度上昇係数である。CPU102は、第2温度(C2)と第1温度(C1)との差分によって、第1のタイミングから第2のタイミングまでの経過時間(T1)を除算することで、温度上昇係数(β)を算出する手段として機能する。このように、CPU102は、定着手段に予め設定されている目標温度(Ct)と測定手段により測定された温度(Cx)との差に対して、予め求められた温度上昇係数(β)を乗算することで、移行時間(Tf)を算出する手段として機能する。
ここで、vは記録媒体の搬送速度[mm/sec]であり、d4は余白データ量[mm]である。このように、CPU106は、搬送路における検知手段が記録媒体を検知する検知位置から定着手段のニップ部までの距離(d5)に対して、余白部の搬送方向における長さ(d4)を加算して和を算出する手段として機能する。さらに、CPU102は、和を記録媒体の搬送速度(v)で除算することで、第1搬送時間(TC)を算出する手段としても機能する。ここで、余白データ量d4を加算するのは余白に応じて給紙のタイミングを前倒しするためである。定着ローラと加圧ローラとが形成するニップ部(定着位置)を記録媒体上の余白部が通過している際には、まだ、定着ローラ212の温度が目標温度に到達していないおそれがある。しかし、余白部が定着位置を通過したタイミングでは定着ローラ212の温度が目標温度に到達している。余白データ量d4を加算するのは余白に応じて給紙のタイミングを前倒しすることにより、ファーストプリントアウトタイムを短縮しつつ、画像の形成位置の精度も維持できる。
S1005で、CPU106は、定着器を起動したタイミングからの経過時間が時間TSを超えたかどうかを判定する。経過時間は、内部タイマーやカウンタにより計測可能である。経過時間が時間TSを超えると、S1006に進む。S1006で、CPU106は、給紙ローラ203を駆動するようDCブラシレスモータ114と上述したクラッチとを制御する。
Claims (9)
- 記録媒体を給紙する給紙手段と、
記録媒体を検知する検知手段と、
画像の書き出し開始を示す信号を出力する信号出力手段と、
外部機器から受信した画像形成ジョブデータを展開して第1画像データを求め、前記第1画像データが余白を示す情報であるか否かに基づき記録媒体の搬送方向の先端側の余白部を除いた第2画像データを生成する画像データ生成手段と、
前記画像の書き出し開始を示す信号が入力されると、前記第2画像データを出力する画像データ出力手段と、
前記画像データ出力手段が出力した前記第2画像データに対応した画像を形成する画像形成手段と、
前記記録媒体の搬送方向の先端側から前記第2画像データの開始位置の手前までの搬送方向の長さを前記余白部の搬送方向の長さとして算出する算出手段と、
前記画像形成手段を起動してから前記画像形成手段が安定した状態に移行するまでの移行時間から、前記算出手段により算出された前記余白部の搬送方向の長さに対応した第1搬送時間と、前記給紙手段が給紙を開始したタイミングから前記検知手段が記録媒体を検知したタイミングまでの第2搬送時間とを減算することで初期時間を決定する決定手段と、
前記画像形成手段を起動したタイミングから前記初期時間が経過したタイミングで前記給紙手段による給紙を開始させる制御手段と
を備えることを特徴とする画像形成装置。 - 前記画像形成手段は、
像担持体と、
前記像担持体に潜像を形成する露光手段と、
前記潜像を現像して現像剤像を形成する現像手段と、
前記現像剤像を記録媒体に転写する転写手段と、
前記現像剤像を加熱して記録媒体に定着させる定着手段と
を備え、
前記移行時間は、前記露光手段を起動してから前記露光手段が安定した状態に移行するまでの移行時間であり、
前記信号出力手段は、前記検知手段が記録媒体を検知したタイミングから前記第1搬送時間が経過したタイミングに画像の書き出し開始を示す信号を出力することを特徴とする請求項1に記載の画像形成装置。 - 前記決定手段は、前記記録媒体の搬送路における前記検知手段が記録媒体を検知する検知位置から前記像担持体と前記転写手段とが形成するニップ部の中心までの距離から、前記像担持体の周面上の距離であって前記像担持体に前記現像手段が現像剤を付与する現像位置から前記ニップ部の中心までの距離を減算して得られた差の距離に対して、前記余白部の搬送方向における長さを加算して出力値を算出し、前記出力値を、記録媒体の搬送速度で除算することで、前記第1搬送時間を算出することを特徴とする請求項2に記載の画像形成装置。
- 前記第2搬送時間および前記移行時間を記憶した記憶手段をさらに備え、
前記決定手段は、前記初期時間を決定する際に、前記記憶手段から前記第2搬送時間および前記移行時間を読み出して使用することを特徴とする請求項1ないし3のいずれか1項に記載の画像形成装置。 - 前記画像形成装置は、さらに、
前記余白部の搬送方向における長さと、前記記録媒体の搬送路における記録媒体の搬送速度とから前記第1搬送時間を算出する手段をさらに備えることを特徴とする請求項1に記載の画像形成装置。 - 前記画像形成手段は、
像担持体と、
前記像担持体に潜像を形成する露光手段と、
前記潜像を現像して現像剤像を形成する現像手段と、
前記現像剤像を記録媒体に転写する転写手段と、
前記現像剤像を加熱して記録媒体に定着させる定着手段と
を備え、
前記移行時間は、前記定着手段を起動してから前記定着手段が安定した状態に移行するまでの移行時間であることを特徴とする請求項1に記載の画像形成装置。 - 前記決定手段は、前記記録媒体の搬送路における前記検知手段が記録媒体を検知する検知位置から前記定着手段のニップ部までの距離に対して、前記余白部の搬送方向における長さを加算して出力値を算出し、前記出力値を、前記記録媒体の搬送速度で除算することで、前記第1搬送時間を算出することを特徴とする請求項6に記載の画像形成装置。
- 画像形成が指示されたときの前記定着手段の温度を測定する測定手段をさらに備え、
前記決定手段は、前記定着手段に予め設定されている目標温度と前記測定手段により測定された温度との差に対して、予め求められた温度上昇係数を乗算することで、前記移行時間を算出することを特徴とする請求項6または7に記載の画像形成装置。 - 前記定着手段が起動した後で、前記測定手段は、第1のタイミングにおける前記定着手段の第1温度を測定するとともに、第2のタイミングにおける前記定着手段の第2温度を測定し、
前記決定手段は、前記第2温度と前記第1温度との差分によって、前記第1のタイミングから前記第2のタイミングまでの経過時間を除算することで、前記温度上昇係数を算出することを特徴とする請求項8に記載の画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010274915A JP5824209B2 (ja) | 2010-12-09 | 2010-12-09 | 画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010274915A JP5824209B2 (ja) | 2010-12-09 | 2010-12-09 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012123268A JP2012123268A (ja) | 2012-06-28 |
| JP2012123268A5 JP2012123268A5 (ja) | 2014-01-30 |
| JP5824209B2 true JP5824209B2 (ja) | 2015-11-25 |
Family
ID=46504754
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010274915A Expired - Fee Related JP5824209B2 (ja) | 2010-12-09 | 2010-12-09 | 画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5824209B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6253314B2 (ja) * | 2013-09-02 | 2017-12-27 | キヤノン株式会社 | 画像形成装置 |
| JP6260251B2 (ja) * | 2013-12-16 | 2018-01-17 | ブラザー工業株式会社 | 画像形成装置 |
| CN104880920B (zh) | 2014-02-27 | 2018-08-17 | 京瓷办公信息系统株式会社 | 图像形成装置与图像形成方法 |
| JP7022371B2 (ja) * | 2017-12-18 | 2022-02-18 | ブラザー工業株式会社 | 画像形成装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0396977A (ja) * | 1989-09-08 | 1991-04-22 | Canon Inc | 画像記録装置 |
| JPH0664219A (ja) * | 1992-08-17 | 1994-03-08 | Ricoh Co Ltd | 画像形成装置 |
| JPH06266178A (ja) * | 1993-03-11 | 1994-09-22 | Canon Inc | 画像形成装置 |
| JPH0736353A (ja) * | 1993-07-21 | 1995-02-07 | Canon Inc | 画像形成装置 |
| JP3195473B2 (ja) * | 1993-08-31 | 2001-08-06 | 京セラミタ株式会社 | 画像形成装置 |
| JP3463237B2 (ja) * | 1999-01-26 | 2003-11-05 | 村田機械株式会社 | 記録装置 |
| JP2000227746A (ja) * | 1999-02-05 | 2000-08-15 | Toshiba Tec Corp | 電子写真装置 |
| JP4250371B2 (ja) * | 2002-03-27 | 2009-04-08 | キヤノン株式会社 | 画像形成装置 |
| JP2008089647A (ja) * | 2006-09-29 | 2008-04-17 | Oki Data Corp | 印刷装置 |
| JP2009175251A (ja) * | 2008-01-22 | 2009-08-06 | Murata Mach Ltd | 画像形成装置、および画像形成装置の制御方法 |
| JP5151658B2 (ja) * | 2008-04-28 | 2013-02-27 | コニカミノルタビジネステクノロジーズ株式会社 | 画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラム |
| JP2010175937A (ja) * | 2009-01-30 | 2010-08-12 | Canon Inc | 画像形成装置 |
| JP5506360B2 (ja) * | 2009-10-06 | 2014-05-28 | キヤノン株式会社 | 画像形成装置 |
-
2010
- 2010-12-09 JP JP2010274915A patent/JP5824209B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012123268A (ja) | 2012-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8311431B2 (en) | Image forming apparatus comprising a control section configured to carry out a control process including setting a power saving mode | |
| JP2010002702A (ja) | 画像形成装置および画像形成方法 | |
| CN107065472B (zh) | 成像设备 | |
| EP3660594B1 (en) | Image forming apparatus and method of controlling image forming apparatus | |
| JP5824209B2 (ja) | 画像形成装置 | |
| JP2006251363A (ja) | 画像形成装置 | |
| CN111781811A (zh) | 加热控制方法及装置、图像形成设备、存储介质 | |
| JP2014113752A (ja) | 画像形成装置、画像形成装置の制御方法、及びプログラム | |
| US9477184B2 (en) | Image forming apparatus controlling temperature of fixing portion in image formation mode and in standby modes | |
| US9904224B2 (en) | Image forming apparatus, and method and computer-readable medium for the same | |
| JP2006011120A (ja) | 画像形成装置、及び画像形成方法 | |
| JP5611295B2 (ja) | 画像形成装置 | |
| JP2011027989A (ja) | 画像形成装置 | |
| JP2007057563A (ja) | 画像形成装置 | |
| JP2010102210A (ja) | 画像形成装置 | |
| JP2017090708A (ja) | 画像形成装置及びその制御方法 | |
| JP2017067918A (ja) | 画像形成装置、画像形成装置の制御方法およびコンピュータプログラム | |
| JP5083769B2 (ja) | 画像形成装置 | |
| JP5355174B2 (ja) | 画像形成装置 | |
| JP4920369B2 (ja) | 画像形成装置 | |
| JP5031490B2 (ja) | 画像形成装置 | |
| US20240103396A1 (en) | Image forming apparatus | |
| JP5013920B2 (ja) | 現像剤供給装置,画像形成装置 | |
| JP2018081221A (ja) | 画像形成装置 | |
| JP2010002605A (ja) | 定着装置および画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131205 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150508 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150701 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150911 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151009 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5824209 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |