JP5811604B2 - 表示装置 - Google Patents
表示装置 Download PDFInfo
- Publication number
- JP5811604B2 JP5811604B2 JP2011128066A JP2011128066A JP5811604B2 JP 5811604 B2 JP5811604 B2 JP 5811604B2 JP 2011128066 A JP2011128066 A JP 2011128066A JP 2011128066 A JP2011128066 A JP 2011128066A JP 5811604 B2 JP5811604 B2 JP 5811604B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- unit
- state
- region
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000003287 optical effect Effects 0.000 claims description 87
- 238000001514 detection method Methods 0.000 claims description 39
- 238000004364 calculation method Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 13
- 238000013500 data storage Methods 0.000 description 12
- 125000006850 spacer group Chemical group 0.000 description 12
- 239000000758 substrate Substances 0.000 description 12
- 230000007423 decrease Effects 0.000 description 7
- 239000003086 colorant Substances 0.000 description 6
- 229910052710 silicon Inorganic materials 0.000 description 6
- 239000010703 silicon Substances 0.000 description 6
- 230000007704 transition Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 4
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 229910004298 SiO 2 Inorganic materials 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 239000003921 oil Substances 0.000 description 2
- 238000001579 optical reflectometry Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 229910000828 alnico Inorganic materials 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910001172 neodymium magnet Inorganic materials 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 229910000938 samarium–cobalt magnet Inorganic materials 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/101—Scanning systems with both horizontal and vertical deflecting means, e.g. raster or XY scanners
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/105—Scanning systems with one or more pivoting mirrors or galvano-mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0118—Head-up displays characterised by optical features comprising devices for improving the contrast of the display / brillance control visibility
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Instrument Panels (AREA)
- Transforming Electric Information Into Light Information (AREA)
Description
しかし、このような表示装置では、常に、光スキャナーの走査範囲(例えば、特許文献1では、鏡面部の回動の振幅)が一定であるため、画像を表示可能な領域である描画可能領域の形状および大きさが一定である。
特に、HUDのような表示装置においては、随時表示する画像(例えば速度計を示す画像)とは異なる領域に適時必要な画像(例えば危険を知らせる画像)を表示するが、その適時必要な画像が表示される領域は、画像を表示しない期間が比較的長い。そのため、エネルギー効率が極めて低くなり、消費電力の増大を招いてしまう。
本発明の表示装置は、光を出射する光出射部と、
前記光出射部から出射した光を反射させる少なくとも1つの光反射部が回動中心軸まわりに回動可能に設けられ、かつ、画像が表示される表示面上にて、前記光反射部で反射した光を第1の方向に走査するとともに前記第1の方向に直交する第2の方向に前記第1の方向に走査する速度よりも遅い速度で走査する光走査部と、前記光反射部の回動の振幅を変更する振幅変更部と、を含み、
前記振幅変更部が前記光反射部の回動の振幅を変更することにより、前記表示面の第1の領域に光を走査する第1の状態と、前記表示面の前記第1の領域と前記第1の領域と異なる第2の領域とに光を走査する第2の状態とを切り換え、
前記光出射部は、前記第2の状態において、前記光出射部から前記第2の領域に出射される単位面積当たりの光量が前記光出射部から前記第1の領域に出射される単位面積当たりの光量よりも多くなるように、前記光出射部から出射される単位時間当たりの光量を調整することを特徴とする。
このような表示装置によれば、必要時のみ、描画可能領域を大きくし、それ以外のときには、描画可能領域が必要最低限となるように光反射部の回動の振幅を抑えることができる。そのため、光反射部の回動の振幅が一定である場合に比し、消費電力を抑えることができる。
これにより、第2の状態において、第2の領域に表示される画像を、第1の領域に表示される画像よりも目立たせることができる。
前記第1の領域に表示される画像と、前記第2の領域に表示される画像とは、互いに異なる種類であることが好ましい。
これにより、第2の状態において、第2の領域に表示される画像を、第1の領域に表示される画像よりも目立たせることができる。
前記第2の領域に表示される画像は、前記移動体の外部の状況に関する情報を示す画像を含むことが好ましい。
これにより、第1の状態および第2の状態において、表示装置を備える移動体の移動状態に関する情報を提供可能としつつ、第2の状態において、移動体の外部の状況に関する情報を報知することができる。
前記振幅変更部は、前記状況検知部の検知結果に基づいて、前記第1の状態と前記第2の状態とを切り換えることが好ましい。
これにより、移動体の外部の状況を検知し得るとともに、その検知結果を報知することができる。
これにより、描画可能領域の第1の方向での長さを変更することができる。
本発明の表示装置では、前記振幅変更部は、前記第2の方向に光を走査する前記光反射部の回動の振幅を変更することが好ましい。
これにより、描画可能領域の第2の方向での長さを変更することができる。
前記振幅変更部は、前記駆動部に供給する前記電流または前記電圧の大きさおよび周波数を調整することにより、前記光反射部の回動の振幅を変更することが好ましい。
これにより、比較的簡単かつ確実に、光反射部の回動の振幅を変更することができる。
本発明の表示装置では、前記光出射部は、レーザー光を出射することが好ましい。
これにより、平行光とするためのレンズ等の光学系を簡略化または小型化することができるため、光出射部の小型化、ひいては、画像形成装置の小型化を図ることができる。
<第1実施形態>
図1は、本発明の第1実施形態に係る表示装置(ヘッドアップディスプレイ)を備える表示システム(ヘッドアップディスプレイシステム)を示す概略図、図2は、図1に示す表示システムの概略を説明するための図、図3は、図1に示す表示システムに備えられた表示装置の概略構成を示す模式図、図4は、図3に示す表示装置の光走査部に備えられた光スキャナーの部分断面斜視図、図5は、図4に示す光スキャナーの動作を説明する断面図、図6は、図3に示す表示装置の制御系(作動制御装置、光走査部および光源ユニット)を示すブロック図、図7は、図3に示す表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)、図8は、図7に示す描画可能領域を説明する図、図9は、図3に示す表示装置の光スキャナー(垂直走査用の光スキャナー)の可動板の振れ角の変遷を示すグラフ、図10は、図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第1の状態)を示すグラフ、図11は、図3に示す表示装置の光スキャナー(水平走査用の光スキャナー)の可動板の振れ角の変遷(第2の状態)を示すグラフである。なお、以下では、説明の便宜上、図5中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言う。
本実施形態では、移動体Mは、車両である。その移動体Mの操縦者は、ウインドシールド9に対して前方に位置する仮想面9Aに虚像として画像(図2に示す画像g)を視認することができる。
このような表示装置1では、作動制御装置5が情報供給部7からの情報に基づいてプロジェクター2の作動を制御し、ウインドシールド9の表示面91上に画像を表示する。
(プロジェクター)
まず、プロジェクター2について説明する。
プロジェクター2は、表示面91に形成される描画領域911に、光を走査することにより画像を表示するように構成されている。
具体的には、図1に示すように、プロジェクター2は、光を出射する光源ユニット(光出射部)3と、表示面91に対して光源ユニット3から出射した光を走査する光走査部4とを有している。
図3に示すように、光源ユニット3は、各色のレーザー光源31r、31g、31bと、各色のレーザー光源31r、31g、31bに対応して設けられたコリメーターレンズ32r、32g、32bおよびダイクロイックミラー33r、33g、33bとを備えている。
ダイクロイックミラー33r、33g、33bは、それぞれ、赤色レーザー光RR、緑色レーザー光GG、青色レーザー光BBを反射する特性を有し、各色のレーザー光RR、GG、BBを結合して1つのレーザー光(光)LLを出射する。
次に、光走査部4について説明する。
光走査部4は、光源ユニット3から出射したレーザー光LLを表示面91に対し、水平方向(第1の方向)に走査(水平走査:主走査)すると共に、水平方向の走査速度(第1の速度)よりも遅い走査速度(第2の速度)で垂直方向(第1の方向に直交する第2の方向)に走査(垂直走査:副走査)することで2次元的に走査するものである。
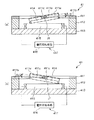
図4に示すように、光スキャナー41は、いわゆる1自由度振動系(1次元走査)のものであり、基体411と、基体411の下面に対向するよう設けられた対向基板413と、基体411と対向基板413との間に設けられたスペーサー部材412とを有している。
支持部411bは、可動板411aの平面視にて、可動板411aの外周を囲むように設けられている。すなわち、支持部411bは、枠状をなしていて、その内側に可動板411aが位置している。
連結部411c、411dは、それぞれ、長手形状をなしている。また、連結部411c、411dは、それぞれ、弾性変形可能である。このような1対の連結部411c、411dは、互いに同軸的に設けられており、この軸(以下「回動中心軸J1」と言う)まわりに、可動板411aが支持部411bに対して回動する。
なお、スペーサー部材412と基体411との接合方法としては、特に限定されず、例えば、接着剤等の別部材を介して接合してもよいし、スペーサー部材412の構成材料などによっては直接接合や陽極接合などを用いてもよい。
永久磁石414は、板棒状をなしていて、可動板411aの下面に沿って設けられている。このような永久磁石414は、可動板411aの平面視にて、回動中心軸J1に対して直交する方向に磁化(着磁)されている。すなわち、永久磁石414は、両極(S極、N極)を結んだ線分が、回動中心軸J1に対して直交するよう設けられている。
コイル415は、可動板411aの平面視にて、永久磁石414の外周を囲むように設けられている。
また、光スキャナー41は、コイル415に電圧を印加する電圧印加手段416を有している。電圧印加手段416は、印加する電圧の電圧値や周波数等の各条件を調整(変更)し得るように構成されている。電圧印加手段416、コイル415および永久磁石414により、可動板411aを回動させる駆動手段(駆動部)417が構成される。
例えば、電圧印加手段416からコイル415に交番電圧を印加すると、それに応じて電流が流れ、可動板411aの厚さ方向(図4中上下方向)の磁界が発生し、かつ、その磁界の向きが周期的に切り換わる。すなわち、コイル415の上側付近がS極、下側付近がN極となる状態Aと、コイル415の上側付近がN極、下側付近がS極となる状態Bとが交互に切り換わる。その際、電圧印加手段416は、後述する作動制御装置5により駆動制御される。
状態Aでは、図5(a)に示すように、永久磁石414の右側の部分が、コイル415への通電により発生する磁界との反発力により上側へ変位するとともに、永久磁石414の左側の部分が、前記磁界との吸引力により下側へ変位する。これにより、可動板411aが反時計回りに回動して傾斜する。
このような状態Aと状態Bとを交互に繰り返すことにより、連結部411c、411dを捩り変形させながら、可動板411aが回動中心軸J1まわりに回動(振動)する。
なお、このような光スキャナー41の構成としては、可動板411aを回動させることができれば、特に限定されず、例えば、2自由度振動系を有するものであってもよく、また、光スキャナー41の駆動方式は、コイル415と永久磁石414とを用いた電磁駆動に代えて、例えば、圧電素子を用いた圧電駆動や、静電引力を用いた静電駆動等であってもよい。
なお、光源ユニット3から出射した光が、先に、光スキャナー42の光反射部421eで反射し、次に、光スキャナー41の光反射部411eで反射するようになっていてもよい。すなわち、先に、垂直走査がなされ、次に、水平走査がなされるように構成されていてもよい。
図4に示すように、角度検出手段43は、光スキャナー41の連結部411c上に設けられた圧電素子431と、圧電素子431から発生する起電力を検出する起電力検出部432と、起電力検出部432の検出結果に基づいて可動板411aの角度を求める(挙動を検知する)角度検知部433とを有している。
また、前記可動板411aの角度の検出は、リアルタイムで(連続的に)行ってもよく、また、間欠的に行ってもよい。また、角度検出手段43としては、可動板411aの角度を検出することができれば、本実施形態のような圧電素子を用いたものに限定されず、例えば、光学センサーを用いてもよい。
次に、作動制御装置5について説明する。
図6に示すように、作動制御装置5は、画像を描画する際に用いられる映像データ(画像データ)を記憶する映像データ記憶部(映像データ記憶手段)51と、映像データ演算部52と、描画タイミング生成部53と、光源変調部(光変調部)54と、振れ角演算部(振幅演算部)55と、角度指示部56とを有している。
このような作動制御装置5は、光反射部411eの回動の振幅(振れ角)を変更することにより、描画が可能な領域である描画可能領域912の水平方向での長さを変更する。
すなわち、作動制御装置5が光反射部411eの回動の振幅を変更することにより、図7(a)に示すように、表示面91の第1の領域912aに光を走査する第1の状態と、図7(b)に示すように、表示面91の第1の領域912aと第1の領域912aと異なって隣接している第2の領域912b、912cとに光を走査する第2の状態とを切り換える。
これにより、必要時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部411eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
作動制御装置5によるプロジェクター2の制御においては、まず、プロジェクター2に映像データが入力される。入力された映像データは映像データ記憶部51に一時的に記憶され、その映像データ記憶部51から読み出された映像データを用いて画像の描画が行われる。この場合、映像データのすべてが映像データ記憶部51に記憶された後に、画像の描画を開始してもよく、また、映像データの一部が映像データ記憶部51に記憶された後に、画像の描画を開始し、その画像の描画と並行して続きの映像データを映像データ記憶部51に記憶するようにしてもよい。
描画タイミング生成部53では、描画タイミング情報および描画ライン情報がそれぞれ生成される。描画タイミング情報は、映像データ演算部52に送出され、描画ライン情報は、振れ角演算部55および角度指示部56に送出される。
映像データ演算部52は、描画タイミング生成部53から入力された描画タイミング情報に基づいて、映像データ記憶部51から描画する画素に対応する映像データを読み出し、各種の補正演算等を行った後、各色の輝度データを光源変調部54に送出する。
なお、本実施形態では、各描画ラインLにおいて、描画開始点から描画終了点まで、可動板421aの角速度を一定とし、レーザー光LLの垂直方向の走査速度を一定とするが、可動板421aの角速度を徐々に変化させ、レーザー光LLの垂直方向の走査速度を徐々に変化さてもよい。
振れ角演算部55では、描画タイミング生成部53から入力された次に描画を行う描画ラインLの垂直方向の位置の情報、および、その描画ラインLの長さ情報に基づいて、次に描画を行う描画ラインLにおける可動板411aの目標振れ角(振れ角の目標値)を求める。
そして、角度検出手段43から入力された可動板411aの振れ角の情報と、前記可動板411aの目標振れ角とに基づいて、可動板411aの振れ角が目標振れ角となるように、光スキャナー41の駆動手段417に駆動データを送出する。
また、作動制御装置5は、情報供給部7からの情報に基づいて、プロジェクター2の作動を制御する。例えば、情報供給部7からの情報に基づき、プロジェクター2が表示する映像を変更したり、光反射部411eの振れ角(回動の振幅)を変更したりすることができる。
情報供給部7は、図3に示すように、外部センサー71と、ナビゲーション装置72とを有する。
外部センサー71は、例えば、CCDイメージセンサー、CMOSイメージセンサー等のイメージセンサーや、赤外センサーや超音波センサー等である。このような外部センサー71は移動体Mに取り付けられ、例えば、移動体Mの周囲の状況として、移動体Mの移動方向前方側の標識(道路交通標識)や、人、自転車、他の自動車等の移動体の存在の有無を検知する機能を有する。また、外部センサー71は、検知した移動体の位置、進行方向、進行速度や、検知した標識の内容を判別する機能を有していても良い。ここで、外部センサー71は、移動体Mの周囲の状況を検知する状況検知センサー(状況検知部)を構成する。
ナビゲーション装置72は、GPSを利用して目的地までの経路を操縦者に案内する機能を有する。
これにより、必要時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部411eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
ここで、光走査部4は、垂直方向に1回走査する間に、水平方向に複数回走査することにより、1つのフレームの画像を表示面91に形成し、これを繰り返すことにより複数のフレームの画像を表示面91に順次形成する。
このような描画ラインLの長さは、可動板411aの回動中心軸J1を中心とする振れ角(以下、単に「可動板411aの振れ角」とも言う)を変更することにより、変更することができる。
具体的には、作動制御装置5は、第1の状態では、光反射部411eの振れ角θ1を角度θ11とし、第2の状態では、光反射部411eの振れ角θ1を角度θ11よりも大きい角度θ12とする。
水平走査は前述したように各フレーム内において複数回行われるが、このような第1の状態における水平走査では、図10に示すように、可動板411aの振れ角θ1は一定(角度θ11)となっている。なお、ここで、「可動板411aの振れ角θ1」とは、図5にて時計回り(一方の方向)へ最大角度(θ1/2)まで回動したときの可動板411aと、可動板411aが図5にて反時計回り(他方の方向)へ最大角度(θ1/2)まで回動したときの可動板411aとのなす角度(最大振れ角)を言う(図11において同じ)。
また、垂直走査は前述したように各フレーム内において1回行われるが、第1の状態および第2の状態において、可動板421aの振れ角θ2(最大振れ角)は一定(角度θ21)である。より具体的には、図9に示すように、可動板421aの角度θ2は、1フレーム内において、画像の表示を行う表示期間では最小振れ角から徐々に増大し、最大振れ角に到達した後、急激に減少する。そして、以降の各フレームにおいては、同様に、前記動作を繰り返す。なお、図9では、各フレーム内における可動板421aが一方の方向へ最大角度(最小振れ角)まで回動したと他方の方向へ最大角度(最大振れ角)まで回動したときとの間の可動板421aの回動角の変遷を示している。また、可動板421aの振れ角θ2が、前述したように急激に減少する期間を「垂直帰線期間」と言う。この垂直帰線期間は、隣接する2つのフレーム間近傍に設定される。
第1の状態では、図7(a)に示すように、第1の領域912aに画像g1が表示される。
また、前述したような第1の状態と第2の状態との切り換えは、前述した情報供給部7(具体的には外部センサー71やナビゲーション装置72)からの情報に応じて行われる。すなわち、作動制御装置5は、外部センサー71の検知結果やナビゲーション装置72からの案内情報に基づいて、第1の状態と第2の状態とを切り換える。このように、外部センサー71の検知結果に基づいて第1の状態と第2の状態とを切り換えることにより、移動体Mの周囲の状況を検知し得るとともに、その検知結果を報知することができる。
以上説明したような第1実施形態に係る表示装置1によれば、移動体Mの外部の情報等を表示する必要がある時のみ、描画可能領域912を大きくし、それ以外のときには、描画可能領域912が必要最低限となるように光反射部411eの回動の振幅を抑えることができる。そのため、光反射部411eの回動の振幅が一定である場合に比し、消費電力を抑えることができる。
次に、本発明の表示装置の第2実施形態について説明する。
図12は、本発明の第2実施形態に係る表示装置の動作を説明するための図(描画可能領域、描画領域および画像を説明する図)、図13は、図12に示す描画可能領域を説明する図である。
第2実施形態の表示装置は、描画可能領域の水平方向での長さを変更せずに描画可能領域の垂直方向での長さを変更する以外は、第1実施形態とほぼ同様である。なお、図12、13にて、前述した実施形態と同様の構成には、同一符号を付してある。
すなわち、光反射部421eの回動の振幅を変更することにより、図13(a)に示すように、表示面91の第1の領域912aに光を走査する第1の状態と、図13(b)に示すように、表示面91の第1の領域912aと第1の領域912aに隣接する第2の領域912d、912eとに光を走査する第2の状態とを切り換える。
ここで、第2の状態での描画可能領域912は、第1の領域912aと、第1の領域912aに対して垂直方向での一方側(図13(b)中の上側)に隣接する第2の領域912dと、第1の領域912aに対して垂直方向での他方側(図13(b)中の下側)に隣接する第2の領域912eとで構成される。
第2の状態では、図12(b)に示すように、第1の領域912aに画像g1が表示されるとともに、第2の領域912dに画像g2が表示される。本実施形態では、第2の状態においても、第2の領域912eには画像を表示しない。なお、第2の状態において第2の領域912eに画像を表示してもよい。また、第2の状態において、第2の領域912dには、画像g2および画像g3(図7(b)参照)を選択的に表示してもよい。
このように、画像g2を画像g1の上側に表示することにより、第2の状態において、画像g2を画像g1よりも目立たせることができる。
以上説明したような第2実施形態に係る表示装置によっても、前述した第1実施形態と同様の効果を発揮することができる。
次に、本発明の表示装置の第3実施形態について説明する。
図14は、本発明の第3実施形態に係る表示装置に備えられたプロジェクターの光スキャナーを示す模式的平面、図15は、図14中のB−B線断面図である。なお、以下では、説明の便宜上、図14中の紙面手前側を「上」、紙面奥側を「下」、右側を「右」、左側を「左」と言い、図15中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言う。
第3実施形態の表示装置は、プロジェクターが備える光スキャナーの構成が異なる以外は、第1実施形態とほぼ同様である。
本実施形態に係る光走査部は、いわゆる2自由度振動系(2次元走査)の1つの光スキャナー45を有している。
第1の振動系46aは、枠状の支持部46cの内側に設けられた枠状の駆動部461aと、駆動部461aを支持部46cに両持ち支持する1対の第1の連結部462a、463aとで構成されている。
駆動部461aは、図14の平面視にて、円環状をなしている。なお、駆動部461aの形状は、枠状をなしていれば特に限定されず、例えば、図14の平面視にて、四角環状をなしていてもよい。このような駆動部461aの下面には、永久磁石491が接合されている。
可動板461bは、図14の平面視にて、円形状をなしている。なお、可動板461bの形状は、駆動部461aの内側に形成することができれば特に限定されず、例えば、図14の平面視にて、楕円形状をなしていてもよいし、四角形状をなしていてもよい。このような可動板461bの上面には、光反射性を有する光反射部464bが形成されている。
第2の連結部462bには、可動板461bの角度(回動中心軸J4まわりの回動角)(挙動)を検出するための圧電素子465bが設けられている。
図15に示すように、以上のような基体46は、スペーサー部材48を介して対向基板47と接合している。対向基板47の上面には、永久磁石491に作用する磁界を発生させるコイル492が設けられている。
コイル492は、電圧印加手段493と電気的に接続されていて、電圧印加手段493によりコイル492に電圧が印加されると、コイル492から回動中心軸J3および回動中心軸J4のそれぞれの軸に直交する軸方向の磁界が発生する。
すると、第1の電圧に基づいて、永久磁石491のS極側をコイル492に引き付けようとするとともに、N極側をコイル492から離間させようとする磁界と、永久磁石491のS極側をコイル492から離間させようとするとともに、N極側をコイル492に引き付けようとする磁界とが交互に切り換わる。これにより、第1の連結部462a、463aを捩れ変形させつつ、駆動部461aが可動板461bとともに、第1の電圧の周波数で回動中心軸J3まわりに回動する。
以上、本発明の表示装置を、図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。また、本発明は、前記各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせたものであってもよい。
また、必要に応じて、垂直方向および水平方向の少なくとも一方の方向における可動板の振れ角を調整するか、あるいは、光出射部の変調を調整して、いわゆる台形補正を行うことも可能である。
また、前述した実施形態では、表示装置が1つのプロジェクターを備える場合を説明したが、これに限定されず、表示装置が備えるプロジェクターの数は、2つ以上であってもよい。この場合、複数のプロジェクターを同期させて作動させることができる。
また、前記実施形態では、3つのダイクロイックミラーを用いて、赤色レーザー光、緑色レーザー光、青色レーザー光を結合して1つのレーザー光(光)を出射しているが、ダイクロイックプリズム等を用いて結合しても良い。
また、前述した実施形態では、移動体が車両(自動車)である場合を例に説明したが、本発明では、これに限らず、移動体は、例えば、列車、飛行体、船等であってもよい。飛行体としては、例えば、旅客機、戦闘機等の飛行機、ヘリコプター、飛行船等が挙げられる。
Claims (9)
- 光を出射する光出射部と、
前記光出射部から出射した光を反射させる少なくとも1つの光反射部が回動中心軸まわりに回動可能に設けられ、かつ、画像が表示される表示面上にて、前記光反射部で反射した光を第1の方向に走査するとともに前記第1の方向に直交する第2の方向に前記第1の方向に走査する速度よりも遅い速度で走査する光走査部と、前記光反射部の回動の振幅を変更する振幅変更部と、を含み、
前記振幅変更部が前記光反射部の回動の振幅を変更することにより、前記表示面の第1の領域に光を走査する第1の状態と、前記表示面の前記第1の領域と前記第1の領域と異なる第2の領域とに光を走査する第2の状態とを切り換え、
前記光出射部は、前記第2の状態において、前記光出射部から前記第2の領域に出射される単位面積当たりの光量が前記光出射部から前記第1の領域に出射される単位面積当たりの光量よりも多くなるように、前記光出射部から出射される単位時間当たりの光量を調整することを特徴とする表示装置。 - 前記光出射部は、前記第2の状態における前記光出射部から前記第1の領域に出射される単位面積当たりの光量が、前記第1の状態における前記光出射部から前記第1の領域に出射される単位面積当たりの光量よりも少なくなるように、前記光出射部から出射される単位時間当たりの光量を調整する請求項1に記載の表示装置。
- 前記第1の状態で前記第1の領域に表示される画像と、前記第2の状態で前記第1の領域に表示される画像とは、互いに同じ種類であり、
前記第1の領域に表示される画像と、前記第2の領域に表示される画像とは、互いに異なる種類である請求項1または2に記載の表示装置。 - 前記第1の領域に表示される画像は、前記表示装置を備える移動体の移動状態に関する情報を示す画像を含み、
前記第2の領域に表示される画像は、前記移動体の外部の状況に関する情報を示す画像を含む請求項3に記載の表示装置。 - 前記移動体の外部の状況を検知する状況検知部を有し、
前記振幅変更部は、前記状況検知部の検知結果に基づいて、前記第1の状態と前記第2の状態とを切り換える請求項4に記載の表示装置。 - 前記振幅変更部は、前記第1の方向に光を走査する前記光反射部の回動の振幅を変更する請求項1ないし5のいずれかに記載の表示装置。
- 前記振幅変更部は、前記第2の方向に光を走査する前記光反射部の回動の振幅を変更する請求項1ないし6のいずれかに記載の表示装置。
- 前記光走査部は、周期的に変化する電流または電圧の供給により前記光反射部を回動させる駆動部を備え、
前記振幅変更部は、前記駆動部に供給する前記電流または前記電圧の大きさおよび周波数を調整することにより、前記光反射部の回動の振幅を変更する請求項1ないし7のいずれかに記載の表示装置。 - 前記光出射部は、レーザー光を出射する請求項1ないし8のいずれかに記載の表示装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011128066A JP5811604B2 (ja) | 2011-06-08 | 2011-06-08 | 表示装置 |
| US13/487,468 US20120313909A1 (en) | 2011-06-08 | 2012-06-04 | Display apparatus |
| CN201210185160.9A CN102819108B (zh) | 2011-06-08 | 2012-06-06 | 显示装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011128066A JP5811604B2 (ja) | 2011-06-08 | 2011-06-08 | 表示装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012255858A JP2012255858A (ja) | 2012-12-27 |
| JP2012255858A5 JP2012255858A5 (ja) | 2014-07-24 |
| JP5811604B2 true JP5811604B2 (ja) | 2015-11-11 |
Family
ID=47292788
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011128066A Expired - Fee Related JP5811604B2 (ja) | 2011-06-08 | 2011-06-08 | 表示装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20120313909A1 (ja) |
| JP (1) | JP5811604B2 (ja) |
| CN (1) | CN102819108B (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5812633B2 (ja) * | 2011-03-14 | 2015-11-17 | 三菱重工業株式会社 | 航空機の制御システム、航空機、航空機の制御プログラム、及び航空機の制御方法 |
| JP5953987B2 (ja) * | 2012-06-29 | 2016-07-20 | 株式会社Jvcケンウッド | 画像表示装置 |
| DE102013216903A1 (de) * | 2013-08-26 | 2015-02-26 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bestimmen einer Straßenqualität |
| JP6285145B2 (ja) * | 2013-10-29 | 2018-02-28 | 浜松ホトニクス株式会社 | 表示装置 |
| DE102013225566A1 (de) * | 2013-12-11 | 2015-06-11 | Robert Bosch Gmbh | Mobiler Mikroprojektor |
| TWI578085B (zh) * | 2014-12-24 | 2017-04-11 | 財團法人工業技術研究院 | 投影裝置 |
| CN105093533A (zh) * | 2015-08-20 | 2015-11-25 | 余剑锋 | 一种虚拟现实头盔装置 |
| US11119315B2 (en) * | 2015-10-15 | 2021-09-14 | Maxell, Ltd. | Information display apparatus |
| JP6627436B2 (ja) * | 2015-11-10 | 2020-01-08 | 船井電機株式会社 | プロジェクタおよびヘッドアップディスプレイ装置 |
| JP6676953B2 (ja) * | 2015-12-17 | 2020-04-08 | 株式会社Jvcケンウッド | 画像表示装置、画像表示方法及びプログラム |
| WO2017110941A1 (ja) * | 2015-12-22 | 2017-06-29 | 京セラ株式会社 | 車両用ヘッドアップディスプレイ装置 |
| JP2019199195A (ja) * | 2018-05-17 | 2019-11-21 | 矢崎総業株式会社 | ヘッドアップディスプレイ装置 |
| CN110531551A (zh) * | 2018-05-25 | 2019-12-03 | 深圳疆程技术有限公司 | 一种液晶显示装置及抬头显示系统 |
| JP6927159B2 (ja) * | 2018-06-01 | 2021-08-25 | 株式会社Jvcケンウッド | ヘッドアップディスプレイ装置 |
| JP7195078B2 (ja) * | 2018-07-20 | 2022-12-23 | スタンレー電気株式会社 | 光照射装置 |
| JP7281657B2 (ja) * | 2019-03-28 | 2023-05-26 | パナソニックIpマネジメント株式会社 | 映像表示システム、映像表示方法、プログラムおよび移動体 |
| JP7190655B2 (ja) * | 2019-03-28 | 2022-12-16 | パナソニックIpマネジメント株式会社 | 映像表示システム、映像表示方法、プログラムおよび移動体 |
| DE112020001579T5 (de) * | 2019-03-28 | 2021-12-23 | Panasonic intellectual property Management co., Ltd | Videoanzeigesystem, videoanzeigeverfahren, programm und beweglicher körper |
| US11281005B2 (en) * | 2019-08-08 | 2022-03-22 | Sharp Kabushiki Kaisha | Compact head-mounted display system with orthogonal panels |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006133643A (ja) * | 2004-11-09 | 2006-05-25 | Seiko Epson Corp | 光走査装置、光走査方法及び画像表示装置 |
| US7932819B2 (en) * | 2005-08-30 | 2011-04-26 | Honda Motor Co., Ltd. | Vehicular instrument device and vehicle with vehicular instrument device |
| JP5076427B2 (ja) * | 2006-09-29 | 2012-11-21 | ブラザー工業株式会社 | 画像表示装置および画像サイズ変更方法 |
| JP2008145455A (ja) * | 2006-12-05 | 2008-06-26 | Canon Inc | 走査型画像表示装置 |
| US8373690B2 (en) * | 2008-10-17 | 2013-02-12 | Panasonic Corporation | Scanning image display apparatus |
| JP2010100106A (ja) * | 2008-10-21 | 2010-05-06 | Toyota Motor Corp | 車両用表示装置 |
| JP2010139688A (ja) * | 2008-12-11 | 2010-06-24 | Panasonic Corp | 画像投影装置 |
| JP2010271663A (ja) * | 2009-05-25 | 2010-12-02 | Hoya Corp | 静電駆動型光スキャナ |
| US8188846B2 (en) * | 2009-06-17 | 2012-05-29 | General Electric Company | System and method for displaying information to vehicle operator |
| JP2011095614A (ja) * | 2009-10-30 | 2011-05-12 | Aisin Aw Co Ltd | 表示制御装置、ナビゲーション装置及び表示制御方法 |
| JP5454325B2 (ja) * | 2009-11-18 | 2014-03-26 | セイコーエプソン株式会社 | 画像形成装置 |
| JP2011237707A (ja) * | 2010-05-13 | 2011-11-24 | Seiko Epson Corp | 画像形成装置 |
-
2011
- 2011-06-08 JP JP2011128066A patent/JP5811604B2/ja not_active Expired - Fee Related
-
2012
- 2012-06-04 US US13/487,468 patent/US20120313909A1/en not_active Abandoned
- 2012-06-06 CN CN201210185160.9A patent/CN102819108B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102819108B (zh) | 2016-06-15 |
| CN102819108A (zh) | 2012-12-12 |
| US20120313909A1 (en) | 2012-12-13 |
| JP2012255858A (ja) | 2012-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5811604B2 (ja) | 表示装置 | |
| JP5811605B2 (ja) | 表示装置 | |
| JP5454325B2 (ja) | 画像形成装置 | |
| US8641195B2 (en) | Image forming apparatus for projecting an image to guide an individual | |
| JP5447115B2 (ja) | 画像形成装置 | |
| JP5447114B2 (ja) | 画像形成装置 | |
| JP2011237707A (ja) | 画像形成装置 | |
| JP5494225B2 (ja) | 画像形成装置 | |
| JP2011123465A (ja) | 光走査型プロジェクター | |
| JP2011102847A (ja) | 画像形成装置 | |
| JP2010230730A (ja) | 画像形成装置 | |
| JP2010217647A (ja) | 画像形成装置 | |
| JP5402589B2 (ja) | 光走査装置 | |
| JP2010217646A (ja) | 画像形成装置 | |
| JP2010230731A (ja) | 画像形成装置 | |
| JP2011107566A (ja) | 画像形成装置 | |
| JP2011102845A (ja) | 画像形成装置 | |
| JP2011107237A (ja) | 画像形成装置 | |
| JP2011221217A (ja) | 画像形成装置 | |
| JP2011107238A (ja) | 画像形成装置 | |
| JP2011170140A (ja) | 画像形成装置 | |
| JP5402588B2 (ja) | 光走査装置 | |
| JP2018054781A (ja) | 光スキャナー、画像表示装置、ヘッドマウントディスプレイおよびヘッドアップディスプレイ | |
| JP2011107284A (ja) | 画像形成装置 | |
| JP2011107347A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140606 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140606 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150317 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150825 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150907 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5811604 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |