JP5773635B2 - 接合装置 - Google Patents
接合装置 Download PDFInfo
- Publication number
- JP5773635B2 JP5773635B2 JP2010280409A JP2010280409A JP5773635B2 JP 5773635 B2 JP5773635 B2 JP 5773635B2 JP 2010280409 A JP2010280409 A JP 2010280409A JP 2010280409 A JP2010280409 A JP 2010280409A JP 5773635 B2 JP5773635 B2 JP 5773635B2
- Authority
- JP
- Japan
- Prior art keywords
- detection sensor
- bonded
- substrate
- detection
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005304 joining Methods 0.000 title claims description 19
- 238000001514 detection method Methods 0.000 claims description 154
- 238000001179 sorption measurement Methods 0.000 claims description 20
- 230000004913 activation Effects 0.000 claims description 18
- 230000003213 activating effect Effects 0.000 claims description 7
- 238000006073 displacement reaction Methods 0.000 claims description 7
- 230000033001 locomotion Effects 0.000 claims description 6
- 230000005389 magnetism Effects 0.000 claims description 6
- 239000000758 substrate Substances 0.000 description 192
- 150000002500 ions Chemical class 0.000 description 47
- 239000002245 particle Substances 0.000 description 22
- 239000012535 impurity Substances 0.000 description 11
- 238000000034 method Methods 0.000 description 10
- 238000012546 transfer Methods 0.000 description 10
- 230000004308 accommodation Effects 0.000 description 8
- 239000000463 material Substances 0.000 description 5
- 239000007789 gas Substances 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 239000011347 resin Substances 0.000 description 4
- 229920005989 resin Polymers 0.000 description 4
- 229910000838 Al alloy Inorganic materials 0.000 description 3
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 3
- 239000011737 fluorine Substances 0.000 description 3
- 229910052731 fluorine Inorganic materials 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 229910001172 neodymium magnet Inorganic materials 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- -1 Argon ions Chemical class 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- XKRFYHLGVUSROY-UHFFFAOYSA-N argon Substances [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 229910000938 samarium–cobalt magnet Inorganic materials 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
Images








Landscapes
- Pressure Welding/Diffusion-Bonding (AREA)
Description
接合チャンバ内に検知センサを設けると、イオンガンの照射により基板の表面から除去され、真空雰囲気中に浮遊した不純物等が検知センサに堆積し、検知センサの検知性能を維持することができなくなる。
具体的には、接合チャンバ内に光電式の検知センサを搭載する場合には、不純物等が付着して発光面と受光面を覆ってしまうとセンサとしての機能が失われてしまう。また、不純物等の発光面と受光面への付着を避けるために、接合チャンバの外部に光電式の検知センサを設置して、接合チャンバの窓を介して検知することも考えられるが、不純物等が窓にスパッタされ、基板の吸着状態を正確に検知することができなかった。
また、接合チャンバ内に機械的に動作する検知センサを搭載する場合には、不純物が検知センサに堆積して機械的な動作が妨げられ、やはりセンサとしての機能が失われてしまう。
この接合装置は、第1被接合体が吸着される吸着面を備える接合体保持部と、接合体保持部に対する第1被接合体の吸着の有無を検知する検知センサと、第1被接合体の第1接合面と第2被接合体の第2接合面を活性化するための活性化成分を出力する活性化部と、検知センサの検知結果に基づいて、活性化部からの活性化成分の出力を制御する制御部と、を備える。
この検知センサは、第1の位置と第2の位置との間を変位する可動部と、可動部の変位を検知する検知部と、を備える。第1の位置は、接合体保持部に第1被接合体が吸着されていない場合に対応し、吸着面より可動部の一部が突出する。また、第2の位置は、接合体保持部に吸着されている第1被接合体に接触することにより移動される位置に対応する。
本発明に係る接合体保持部は、第1の位置と第2の位置との間を変位する際に、可動部のその一部が進退する検知窓を備える。この検知窓は、接合体保持部により吸着される第1被接合体により覆われる領域に形成される。
このように、第1被接合体が接合体保持部に吸着されると、検知窓が第1被接合体に覆われる。したがって、第1接合面と第2接合面の表面を活性化することに起因する不純物が検知窓を通って検知センサに堆積するなどの影響を受けることがない。したがって、接合装置の接合チャンバ内にて検知センサを使用したとしても、被接合体が接合体保持部へ吸着されていることをユーザの手を借りることなく長期に亘って確認することが可能となり、接合装置の信頼性を向上することができる。
また、制御部は、検知センサが接合体保持部への第1被接合体の吸着を検知していないときは、活性化部をインターロックして、活性化成分を出力できない状態とする。これにより、接合体保持部に第1被接合体が吸着されていない状態で活性化が誤って行われることを未然に防ぐことができる。
なお、以上では第1被接合体についてのみ言及しているが、第2被接合体が吸着される接合体保持部をさらに備える場合には、この接合体保持部について同様の検知窓を設けるとともに、同様の検知センサを設けることができる。つまり、本発明の特徴部分は、第1被接合体及び第2被接合体の一方又は双方に適用されることを包含する。
<第1実施形態>
図1に示されているように、常温接合装置1は、接合チャンバ2とロードロックチャンバ3とを備えている。接合チャンバ2とロードロックチャンバ3は、内部を環境から密閉する容器であり、一般的には、ステンレス鋼、アルミニウム合金などにより形成されている。常温接合装置1は、さらに、ゲートバルブ5を備えている。ゲートバルブ5は、接合チャンバ2とロードロックチャンバ3との間に介設され、接合チャンバ2の内部とロードロックチャンバ3の内部とを接続するゲートを閉鎖し、または、開放する。
イオンガン32は、照射方向36に向けて加速された荷電粒子(活性化成分)を放出する。その荷電粒子としては、アルゴンイオンが例示される。ただし、イオンガン32は、被接合体である基板(以下、単に基板と言うことがある)の表面を活性化することのできる他の表面活性化部に置換することができる。その表面活性化部としては、プラズマガン、高速原子ビーム源などが例示される。
電子銃33は、イオンガン32により荷電粒子が照射される対象に向けて加速された電子を放出する。
ロードセル42は、接合チャンバ2に対して鉛直方向に移動可能に支持されている。
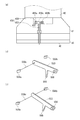
角度調整機構43は、図2(b)に示すように、基板保持部44と接合される球フランジ43bと、かしめにより球フランジ43bに固定される固定フランジ43cと、球フランジ43bに密着する球座面を有し、ロードセル42に接合される球座43aとを備える。基板保持部44は、この角度調整機構43を介して、任意の向きへの角変位ができるようにロードセル42に支持されている。
基板保持部44の下端には、切り欠き部45aを有する静電チャック(誘電層)45が設けられている。静電チャック45と静電チャック45に吸着される基板との間に電圧が印加され、鉛直方向の上向きに作用する静電力によって静電チャック45の吸着面46に基板を吸着して保持する(図5も参照)。
基板保持部44の側面であって切り欠き部45aの近傍には、基板が静電チャック45へ吸着しているか否かを検知する検知センサ50が設けられている。検知センサ50は、図示しない配線によりイオンガン32の動作を制御する制御部4に接続されている。制御部4は、検知センサ50が基板(上側基板)の静電チャック45への吸着を検知しているときは、イオンガン32のインターロックを解除し、荷電粒子の照射を開始できる状態とし、検知センサ50が基板の静電チャック45への吸着を検知していないときは、イオンガン32をインターロックして、荷電粒子を照射できない状態とする。なお、検知センサ50と制御部4とで、基板検知部を構成する。
圧接機構41は、ユーザの操作により、基板保持部44を接合チャンバ2に対して鉛直方向に移動させる。
図3および図4に示すように、検知センサ50は、静電チャック45の吸着面46に基板が吸着しているか否かを検知するセンサ本体51と、センサ本体51を内部に収容する収容ケース52と、からなる。なお、図3は、検知センサ50から収容ケース52の正面部を取り除いた状態を示している。
また、可動部53には、その長手方向の中間の位置から垂直方向に突出し、静電チャック45に吸着された上側基板SAと接触する接触部55が設けられている。接触部55は、フッ素系樹脂や高分子材料など低摩擦係数の部材により被覆されており、接触部55との接触による上側基板SAの損傷や位置ずれを防止することができる。
可動部53は、接触部55が静電チャック45に吸着された上側基板SAに接触すると、回転軸56を支点にして、永久磁石57が埋め込まれた一端側が上方に変位する(図3(b)、図4(b))。
ホールIC素子59は、センサ本体51の接触部55に吸着された上側基板SAが接触することで変位したときの永久磁石57の位置に対応するように設けられている。検知部71および支持部72は、ともに非磁性体材料からなる。検知部71は支持部72にネジ止めされ、支持部72は、収容ケース52の内側に固定される。
ホール素子は樹脂でモールドされているが、一辺が数mm以下の小さいサイズのものを使用できるため、高真空下の接合チャンバ2の内部で用いても放出ガスは微量である。
図3および図5(a)に示すように、検知センサ50は、接合チャンバ2内の基板保持部44の側面に、静電チャック45の切り欠き部45aに部分的にオーバーラップするように取り付けられる。検知センサ50は、静電チャック45に上側基板SAが吸着されていない状態では、接触部55が静電チャック45の吸着面46より下方に位置し(図3(a)、第1の位置)、静電チャック45に上側基板SAが吸着している状態では、接触部55が吸着面46の同一面内に位置するように(図3(b)、第2の位置)、設置される。可動部53は、第1の位置と第2の位置との間を揺動運動する。そして、接触部55は、第1の位置と第2の位置を変位する際に、検出窓Wを進退する。
検知センサ50は、水平方向についてみると、図1、図2に示されているように、基板保持部44及び静電チャック45を挟んで、イオンガン32と反対の位置に配置されている。つまり、検知センサ50は、イオンガン32に対して基板保持部44及び静電チャック45の影に隠れており、照射される荷電粒子の影響を受けにくい位置に配置されている。
図3(a)、図4(a)に示すように、上側基板SAが静電チャック45に吸着されていないとき、可動部53は支持部72により水平に支持され、接触部55は第1の位置に位置する。この位置では、永久磁石57とホールIC素子59は互いに最も離れた位置にあり、ホールIC素子59が検知する永久磁石57の磁気は最も弱い。このとき、イオンガン32は、制御部4によりインターロックされており、荷電粒子を照射できない。
図3(b)に示すように、上側基板SAが静電チャック45に吸着されると、接触部55が上側基板SAに接触して吸着面46と同一面内(第2の位置)に押し込まれる。このとき、永久磁石57とホールIC素子59が互いに最も接近して、ホールIC素子59の出力信号電圧にも変化が生じる。このホールIC素子59の出力信号電圧は、制御部4の信号処理回路においてしきい値である基準信号電圧と比較され、上側基板SAが静電チャック45に吸着されていると判定される。この判定結果に基づき、制御部4はイオンガン32のインターロックを解除するので、イオンガン32は荷電粒子の照射をすることができるスタンバイ状態となる。
静電チャック45に吸着された上側基板SAが吸着面46から外れると、可動部53が自重により変位し、接触部55は検出窓Wを通って第1の位置に戻る。そうすると、制御部4は、イオンガン32を再びインターロックし、照射のスタンバイ状態を強制的に終了する。
ユーザは、まず、ゲートバルブ5を閉鎖して、真空ポンプ31を用いて接合チャンバ2の内部に真空雰囲気を生成し、ロードロックチャンバ3の内部に大気圧雰囲気を生成する。ユーザは、ロードロックチャンバ3の蓋を開けて、上側カートリッジ11を上側カートリッジ台6に配置し、下側カートリッジ12を下側カートリッジ台7に配置する。ユーザは、上側カートリッジ11の所定の位置に上側基板SAを載せる。ユーザは、下側カートリッジ12の所定の位置に下側基板SB(第2被接合体に対応)を載せる。ユーザは、次いで、ロードロックチャンバ3の蓋を閉めて、ロードロックチャンバ3の内部に真空雰囲気を生成する。
このような検知センサ50を接合チャンバ2内で使用することにより、上側基板SAが静電チャック45に吸着したか否かをリアルタイムに検知することが可能となるので、従来のような目視による接合状態の確認は不要となり、常温接合装置1の信頼性を向上することができる。
さらに、上側基板SAが静電チャック45に吸着されていない状態では、イオンガン32がインターロックされるため荷電粒子が誤って照射されることがない。そして、イオンガン32の照射中に上側基板SAが外れたとしても、検知センサ50がその状態を直ちに検出し、イオンガン32をインターロックして照射を強制的に終了する。したがって、静電チャック45や吸着面46がイオンガン32の照射に直接曝されることがないので、静電チャック45の損傷や吸着面46の劣化が防止される。
また、検知センサ50は、バネ等を用いることなく、可動部53の自重による変位によってセンシングを行うという簡易な構成であるため、製作コストを抑えることができる。
さらに、検知センサ50は、基板保持部44の側面に外付けされるため、メンテナンスも容易に行うことができる。
なお、図3に示されるように、検知センサ50は、その図中の下面と吸着されている上側基板SAの図中の上面との間に隙間があるように配置されている。これは、検知センサ50に上側基板SAが接触するのを回避するためである。しかし、検知センサ50は、上述したように、イオンガン32に対して基板保持部44及び静電チャック45の影に隠れており、この隙間から荷電粒子が浸入するおそれはきわめて小さい。
図6に示すように、第2実施形態の常温接合装置1は、検知センサ50の構成および設置位置を変更した外は、第1実施形態と同様に構成されている。したがって、図6において、図3と同符号は図3と同じ構成部分を示している。
図6(a)に示すように、上側基板SAが静電チャック45に吸着されていないとき、可動部153のストッパ部158は拡経部Peの底部Pebに保持され、接触部155は吸着面46から突出している(第3の位置)。このとき、永久磁石157とホールIC素子159は互いに最も離れた位置にあり、ホールIC素子159が検知する永久磁石157の磁気は最も弱い。接触部155が第3の位置にあるとき、イオンガン32は制御部4によりインターロックされており、荷電粒子を照射することができない。
図6(b)に示すように、上側基板SAが静電チャック45に吸着されると、接触部155が上側基板SAに接触して吸着面46と同一面内に押し込まれ、可動部153が上昇する(第4の位置)。このとき、上側基板SAが吸着面46に開口した収容路Pを覆う。さらに、このとき、永久磁石157とホールIC素子159が互いに最も接近してホールIC素子159が永久磁石157から受ける磁気量が変化し、第1実施形態と同様に、制御部4は、イオンガン32のインターロックを解除し、荷電粒子の照射を行えるようにスタンバイする。
イオンガン32の照射による基板の接合面の活性化中に、上側基板SAが静電チャック45から外れると、可動部153は自重により下降し、接触部155が第3の位置に戻る。そうすると、制御部4は、イオンガン32を再びインターロックして、荷電粒子の照射を強制的に終了する。
さらに、第2実施形態の検出センサ150は、接触部155が吸着面46の中心近傍から突出するように設けられるため、基板の径が小さくなっても吸着状態を検知することができる。したがって、このような検出センサ150を用いれば、径の異なる基板を連続して処理することが可能となり、より自由度が高く効率的な接合基板の生産を実現することができる。
また、検出センサ150の可動部153は、鉛直垂直方向へ移動するものであるため、吸着する上側基板SAと接触しても上側基板SAに水平方向成分の力が加わらないので、上側基板SAに位置ずれをおこされることがなく、接合作業前の位置決めが容易である。
図8(a)に示すように、第3実施形態は、検知センサ150の構成を部分的に変更した外は、第2実施形態と同様に構成されている。したがって、図8(a)において、図6と同符号は図6と同じ構成部分を示している。
図8(a)に示すとおり、第3実施形態の検知センサ250は、一端部に永久磁石257を備え、他端部が検知室Rの底部Bにボルト256にて固定される弾性板251を備える。可動部253は、第1円柱部252の先端に永久磁石が設けられていないことを除いて、第2実施形態と同様に構成されている。
上側基板SAが静電チャック45に吸着すると、可動部253の図示しない接触部が基板に接触し可動部253が上昇する。そうすると、第1円柱部252の上端が弾性板251を押し上げるので、弾性板251は上向きに撓み、永久磁石257が検知室Rに設けられたホールIC素子259に近接する。
上側基板SAがもし静電チャック45から外れると、可動部253(第1円柱部252)が自重にてより下降して弾性板251も元の位置に弾性復帰し、永久磁石257とホールIC素子259との距離に変化が生じる。この永久磁石257とホールIC素子259の距離の変化により、第2実施形態と同様に、ホールIC素子259が磁気量の変化を出力電圧の変化に変換し、制御部4の信号回路処理にて上側基板SAの静電チャック45への吸着有無が判定される。そして、第2実施形態と同様に、この判定結果に基づき、イオンガン32に対してインターロックおよびインターロック解除が制御部4により指示される。
図8(b)に示すように、第4実施形態は、検知センサ150の構成を変更した外は、第2実施形態と同様に構成されている。したがって、図8(b)において、図6と同符号は図6と同じ構成部分を示している。
第4実施形態の検知センサ350は、検知室Rの底部Bに設けられた弾性板351の変位を歪ゲージ357が検知することで、上側基板SAの静電チャック45への吸着状態を検知するものである。可動部353は、第1円柱部352の先端に永久磁石が設けられていないことを除いて、第2実施形態の可動部153と同様に構成されている。
可動部353の図示しない接触部が上側基板SAに接触し、可動部353が上昇すると、第1円柱部352の上端が、検知室Rの底部Bにボルト356にて一端が固定され、歪ゲージ357を備えた弾性板351を押し上げて、弾性板351が上方に撓む。この撓みを歪ゲージ357が検知し、この検知信号は制御部4に送られる。そうすると、制御部4は、イオンガン32のインターロックを解除し、荷電粒子の照射をスタンバイする。上側基板SAが静電チャック45から外れると、可動部353(第1円柱部352)が自重にて下降して弾性板351も元の位置に弾性復帰し、歪ゲージ357からの信号送信は停止される。そうすると、制御部4は、イオンガン32をインターロックする。
図9(a)に示すように、第5実施形態は、検知センサ50を光電式の検知センサ450とした外は、第2実施形態と同様に構成されている。したがって、図9(a)において、図6と同符号は図6と同じ構成部分を示している。
検知センサ450は、発光部459aと受光部459bとからなる光電式検知部459を検知室Rに備えている。発光部459aは、受光部459bに向けて検知光459cを発光している。受光部459bが検知光459cを受光しているとき、光電式検知部459からの信号により、制御部4は、イオンガン32をインターロックする。
検知センサ450は、可動部453を備えている。可動部453は、第1円柱部452に永久磁石を備えていないことを除いて、第2実施形態の可動部153と同じ構成である。
上側基板SAが静電チャック45に吸着して可動部453が上昇すると、第1円柱部452の先端が検知光459cを遮蔽し、受光部459bが検知光459cを受光できなくなる。そうすると、制御部4は、上側基板SAが静電チャック45に吸着していると判定し、イオンガン32のインターロックを解除する。
このように、上側基板SAが吸着されると外部から遮蔽される検知室Rに光電式検知部459を設けることにより、発光部459aの発光面や受光部459bの受光面がイオンガン32による荷電粒子の照射に起因するデポジションの影響を受けることがない。したがって、検知センサ450の検知性能を長期に渡り維持することが可能となる。
なお、光電式のセンサは、鉛垂直方向に昇降する可動部453以外にも、図9(b)(c)に示すように、回転軸556を支点として変位する揺動型の可動部553を適用にすることもできる。図9(b)に示すように、上側基板SAが静電チャック45に吸着していない状態では、可動部553は発光部559aから受光部559bに向けて発せられる検知光559cを遮蔽している。上側基板SAが静電チャック45に吸着して可動部553の接触部555が上側基板SAに接触すると、可動部553が回転軸556を支点に変位し、検知光559cが受光部559bにより受光され、上側基板SAの静電チャック45への吸着を検知する。
以上では常温接合装置について説明したが、本発明はこれに限定されず、プラズマ照射により接合面を活性化した後に接合を行う方法・装置など、他の接合方法であって、被接合体が吸着されながら保持される部位を備える接合装置に広く適用することができる。
また、以上では、第1被接合体(上側基板SA)と第2被接合体(下側基板SB)とが鉛直方向に対向して配置された状態で接合面が活性化され、かつ接合される形態を説明したが、本発明はこれに限定されない。要は、第1被接合体(又は第2被接合体)が吸着された状態にありながら、吸着が不十分なために第1被接合体が鉛直方向に落下し、あるいは吸着面からずれ落ちる可能性がある状態で活性化処理される接合装置に広く適用できる。例えば、第1被接合体(第1接合面)及び第2被接合体(第2接合面)がともに水平方向に沿っているが軸同士が偏心して配置されている場合、あるいは、第1被接合体及び第2被接合体がともに鉛直方向に沿って配列されている場合、も本発明に包含される。
Claims (7)
- 第1被接合体の第1接合面と第2被接合体の第2接合面を予め活性化した後に、前記第1接合面と前記第2接合面とを付き合わせて前記第1被接合体と前記第2被接合体を接合する接合装置であって、
前記第1被接合体が吸着される吸着面を備える接合体保持部と、
前記接合体保持部に対する前記第1被接合体の吸着の有無を検知する検知センサと、
前記第1被接合体の前記第1接合面と前記第2被接合体の前記第2接合面を活性化するための活性化成分を出力する活性化部と、
前記検知センサの検知結果に基づいて、前記活性化部からの前記活性化成分の出力を制御する制御部と、を備え、
前記検知センサは、
前記吸着面よりその一部が突出し、前記接合体保持部に前記第1被接合体が吸着されていない第1の位置と、前記接合体保持部に吸着されている前記第1被接合体に接触することにより移動される第2の位置と、の間を変位する可動部と、
前記可動部の変位を検知する検知部と、
を備え、
前記接合体保持部は、
前記第1の位置と前記第2の位置との間を変位する際に、前記可動部の前記その一部が進退する検知窓、を備え、
前記検知窓は、前記接合体保持部により吸着される前記第1被接合体により覆われる領域に形成されるとともに、
前記制御部は、前記検知センサが前記接合体保持部への前記第1被接合体の吸着を検知していないときは、前記活性化部をインターロックして、前記活性化成分を出力できない状態とする、
ことを特徴とする接合装置。 - 前記検知センサは、
前記接合体保持部に近接して配置され、前記検知センサを収容するケースを備え、
前記検知窓は前記ケースに設けられる、
請求項1に記載の接合装置。 - 前記接合体保持部は、前記検知センサを収容する収容部を備え、
前記検知窓は、前記吸着面に開口する、
請求項1に記載の接合装置。 - 前記検知センサの前記可動部は、揺動運動することにより、前記第1の位置と前記第2の位置との間を変位する、
請求項1〜3のいずれか一項に記載の接合装置。 - 前記検知センサの前記可動部は、鉛直方向に往復直線運動することにより、前記第1の位置と前記第2の位置との間を変位する、
請求項1〜3のいずれか一項に記載の接合装置。 - 前記検知センサは、前記第1の位置と前記第2の位置との間で検知される磁気の変化により前記第1被接合体の吸着の有無を検知する、
請求項1〜5のいずれか一項に記載の接合装置。 - 前記検知センサは、前記第1の位置と前記第2の位置との間で検知される光の変化により前記第1被接合体の吸着の有無を検知する、
請求項1〜5のいずれか一項に記載の接合装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010280409A JP5773635B2 (ja) | 2010-12-16 | 2010-12-16 | 接合装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010280409A JP5773635B2 (ja) | 2010-12-16 | 2010-12-16 | 接合装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012125817A JP2012125817A (ja) | 2012-07-05 |
| JP5773635B2 true JP5773635B2 (ja) | 2015-09-02 |
Family
ID=46643475
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010280409A Active JP5773635B2 (ja) | 2010-12-16 | 2010-12-16 | 接合装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5773635B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102071972B1 (ko) * | 2018-08-07 | 2020-01-31 | 주식회사 제이투시스 | 공작물 지지장치 |
| US12125687B2 (en) | 2021-07-02 | 2024-10-22 | Samsung Electronics Co., Ltd. | System of semiconductor process and control method thereof |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0197335A (ja) * | 1987-10-08 | 1989-04-14 | Omron Tateisi Electron Co | マイクロスイッチ |
| JPH03109783U (ja) * | 1990-02-26 | 1991-11-11 | ||
| JP2003141975A (ja) * | 2001-10-31 | 2003-05-16 | Omron Corp | 故障予知機能付スイッチ |
| JP2005246575A (ja) * | 2004-03-05 | 2005-09-15 | Metrol Ltd | 真空吸着パッド |
| JP2006005240A (ja) * | 2004-06-18 | 2006-01-05 | Nikon Corp | 基板搬送装置、基板搬送方法および露光装置 |
| JP2006092777A (ja) * | 2004-09-21 | 2006-04-06 | Niles Co Ltd | 無接点スイッチ |
| JP2006332519A (ja) * | 2005-05-30 | 2006-12-07 | Nikon Corp | 静電チャック装置および露光装置 |
| JP3970304B1 (ja) * | 2006-03-27 | 2007-09-05 | 三菱重工業株式会社 | 常温接合装置 |
| US20090255980A1 (en) * | 2008-04-15 | 2009-10-15 | Lockheed Martin Corporation | Control systems for friction stir welding of titanium alloys and other high temperature materials |
| JP4786693B2 (ja) * | 2008-09-30 | 2011-10-05 | 三菱重工業株式会社 | ウェハ接合装置およびウェハ接合方法 |
-
2010
- 2010-12-16 JP JP2010280409A patent/JP5773635B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102071972B1 (ko) * | 2018-08-07 | 2020-01-31 | 주식회사 제이투시스 | 공작물 지지장치 |
| US12125687B2 (en) | 2021-07-02 | 2024-10-22 | Samsung Electronics Co., Ltd. | System of semiconductor process and control method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012125817A (ja) | 2012-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8424703B2 (en) | Substrate container sealing via movable magnets | |
| JP3970304B1 (ja) | 常温接合装置 | |
| JP5773635B2 (ja) | 接合装置 | |
| EP2140186A2 (en) | Plate rotating device, exhaust path opening degree changing device, exhausted device, transfer device, beam device, and gate valve | |
| CN109923688A (zh) | 基板处理设备以及使用基板处理设备的方法 | |
| JP5250086B2 (ja) | ロボットハンド | |
| JP2017220561A (ja) | ノズルユニット、およびノズルユニットを備える雰囲気置換装置、ならびに雰囲気置換方法 | |
| TWI660812B (zh) | 吸附緩衝裝置 | |
| US10197166B2 (en) | Vacuum gate valve | |
| JP5822462B2 (ja) | 接合装置 | |
| EP2850631A1 (en) | Magnetic switch actuators | |
| CN111885947B (zh) | 用于存放实验室检样的具有磁性封闭装置的实验室机柜设备 | |
| KR101252974B1 (ko) | 상온 접합 장치 | |
| JP5142030B2 (ja) | 多軸モータ | |
| CN215116536U (zh) | 一种显示屏检测装置 | |
| TW201900284A (zh) | 噴嘴單元、及具備噴嘴單元的環境氣體置換裝置、與環境氣體置換方法 | |
| JP2010274359A (ja) | 倣い機構 | |
| JP2020164943A (ja) | 真空装置、運搬装置、アラインメント方法 | |
| WO2015005013A1 (ja) | アクチュエータ装置及び車両用開閉体制御装置 | |
| JP6941086B2 (ja) | 電磁アクチュエータ、およびそれを備えた電磁弁 | |
| JP2015224751A (ja) | 真空用ゲートバルブ | |
| JP4841270B2 (ja) | 弁装置および流路制御システム | |
| US11820002B2 (en) | Flange device using voice coil motor and contact control method thereof | |
| JP2819735B2 (ja) | 電磁ブレーキ付ダイレクトドライブモータ | |
| CN221854760U (zh) | 一种用于基材pp膜真空双面镀膜设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141015 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141105 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150603 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150630 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5773635 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |