JP5741310B2 - 車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム - Google Patents
車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム Download PDFInfo
- Publication number
- JP5741310B2 JP5741310B2 JP2011175083A JP2011175083A JP5741310B2 JP 5741310 B2 JP5741310 B2 JP 5741310B2 JP 2011175083 A JP2011175083 A JP 2011175083A JP 2011175083 A JP2011175083 A JP 2011175083A JP 5741310 B2 JP5741310 B2 JP 5741310B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- sensor
- train
- unit
- length
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/07—Controlling traffic signals
- G08G1/08—Controlling traffic signals according to detected number or speed of vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/66—Radar-tracking systems; Analogous systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/91—Radar or analogous systems specially adapted for specific applications for traffic control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0116—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from roadside infrastructure, e.g. beacons
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0145—Measuring and analyzing of parameters relative to traffic conditions for specific applications for active traffic flow control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Signal Processing (AREA)
- Electromagnetism (AREA)
- Traffic Control Systems (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Radar Systems Or Details Thereof (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
例えば、特許文献1に開示された技術では、プローブ車両から取得したプローブ情報を用いて、プローブ車両が車両感知器の感知領域を通過した時刻及び信号待ち行列の末尾に到達した時刻及び到達位置が特定される。そしてその技術では、プローブ車両が車両感知器の感知領域を通過した時刻及び信号待ち行列の末尾に到達した時刻及び到達位置を用いて、任意の時刻にその感知領域を通過した車両が信号待ち行列の末尾となったときの位置が算出される。
また、特許文献2には、車両の進行方向と同じ方向にレンズを向けるようにカメラを設置し、車両の後方位置から道路の映像を撮影して車両待機行列の長さを測定する技術が開示されている。
さらに、特許文献3には、ブレーキ操作がされると、その時の車両の平均減速度を求めた後、制動距離を求め、その制動距離から車両が停止する到達位置を求める技術が開示されている。
また、特許文献2に開示された技術では、車両を後方から撮影するカメラが用いられる。しかし、このようなカメラを設置するために、カメラを取り付けるための支柱を道路の側に新たに設置しなければならないおそれがあった。
さらに、特許文献3に開示された技術は、車両に搭載される装置に適用される。そのため、この技術が適用された装置は、その装置が搭載された車両の停止位置を予測できるものの、他の車両が停止しているか否かを知ることはできないので、車列長を求めることはできない。
上記の一般的な記述及び下記の詳細な記述の何れも、例示的かつ説明的なものであり、請求項のように、本発明を限定するものではないことを理解されたい。
この車列長測定装置は、例えば、交差点の近傍において、その交差点に接近してくる車両の前面に対向するように設置されたセンサからのセンサ信号に基づいて、交差点などで一時的に停車している車両の列の長さを測定する。そしてこの車列長測定装置は、センサの検知範囲内を走行中の車両のうち、停車している車両の列よりも後方で先頭を走行中の車両の挙動に基づいてその車両の停止位置を推定し、推定した停止位置に基づいて車両の列の長さを測定する。
なお、センサ2の送信アンテナ及び受信アンテナは、特定の方向へ向けてレーダ波を放射し、その特定方向からの反射波を受信する指向性を持つアンテナであってもよい。この場合には、センサ2は、送信アンテナ及び受信アンテナを一定の周期(例えば、100msec周期)で水平方向の所定の角度範囲内を走査させる送信アンテナ及び受信アンテナの駆動機構をさらに有してもよい。この場合、センサ2は、所定の走査角度間隔及び距離間隔で設定された複数の位置のそれぞれについて、センサ2からその位置までの距離と、反射波の信号強度と、その位置にある物体の速度とを含むセンサ信号を出力する。
センサ2は、道路上を走行中または停止中の車両を検知するために、車両よりも上方に設置され、斜め下方へ向けてレーダ波を放射するようにセンサ2の送信アンテナの向きが調整され、その結果、センサ2の検知範囲200は、交差点の手前から道路上に沿って所定の距離離れたところまでを含む。この場合、車両211の後方の領域201では、レーダ波が車両211によって遮られるため、センサ2は、その領域201内に位置する車両212を検知できない。すなわち、領域201においてオクルージョンが発生している。そして車両211が大きいほど、センサ2が車両を検知できない領域も広くなり、場合によっては、領域201の長さは約40mにもなる。そして停止中の車両の列の最後尾が領域201内に位置すると、センサ2は、車両の列の最後尾に位置する車両を検知できない。
しかし、領域201よりもさらに後方の領域202にはレーダ波が届くので、センサ2は、領域202内に位置する車両213を検知できる。そして車両213が停止中の車両の列の最後尾に達すると、車両213も停車する。そのため、車両213の挙動は、車両の列の最後尾の位置を特定するために利用できる。
そこで、車列長測定装置1は、センサ2の検知範囲内で、最も前方を走行する車両を検知し、その車両の挙動に基づいて車列長を求める。
例えば、車両検知部21は、センサ信号に含まれる複数の位置のそれぞれについて、反射波の信号強度と検知すべき物体が存在しないときの信号強度に相当する閾値とを比較する。そして車両検知部21は、その信号強度が閾値よりも大きい位置に車両が存在すると判定する。そして車両検知部21は、車両が検知された位置に対応する速度を検知された車両の速度とする。
なお、最新の青信号期間内に検知された車両が1台もなければ、記憶部13は、その最新の青信号期間よりも前の青信号期間について求められた基準加速度Astdを保持する。また、基準加速度算出部22は、複数の青信号期間の何れかについて検知された車両についてそれぞれ加速度を求め、各車両の加速度の平均値、中央値あるいは最頻値を基準加速度Astdとしてもよい。
また、センサ2が設置された交差点よりも先の交差点を起点とする車列のために、車両が減速する可能性がある。このような場合、基準加速度算出部22は、基準加速度Astdをより適切に決定するためには、先の交差点から離れた車両の追跡情報のみを用いることが好ましい。そこで基準加速度算出部22は、センサ2の検知範囲の中心よりも遠方において検知されている車両の追跡情報のみを用いて基準加速度Astdを求めてもよい。
そして減速判定部23は、注目車両の加速度を求める度に、その注目車両の加速度を減速判定閾値Athと比較する。注目車両の加速度が減速判定閾値Athよりも低ければ、減速判定部23は、注目車両は停止するために減速していると判定する。
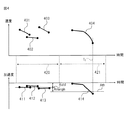
図4において横軸は時間を表す。また上側のグラフの縦軸は、検知された車両の速度を表し、下側のグラフの縦軸は、検知された車両の加速度を表す。なお、車両が減速している場合、その車両の加速度は負の値となる。
上側のグラフにおける線401〜403は、それぞれ、青信号期間420において検知された個々の車両の速度の時間変化を表す。また下側のグラフにおける線411〜413は、それぞれ、線401〜403に対応する車両の加速度の時間変化を表す。基準加速度算出部22は、線411〜413に示された加速度の統計値、例えば、それらの加速度の平均値を基準加速度Astdとし、基準加速度Astdに負のマージン値Amarginを加えた値を減速判定閾値Athに設定する。
一方、上側のグラフにおける線404は、赤信号期間421において検知された注目車両の速度の時間変化を表す。また下側のグラフにおける線414は、注目車両の加速度の時間変化を表す。線414に示されるように、時刻t1において、注目車両の加速度は、減速判定閾値Athよりも低くなる。そこで、この例では、減速判定部23は、時刻t1において注目車両が停止するために減速していると判定する。
減速判定部23は、注目車両が停止するために減速していると判定すると、その旨を停止位置推定部24に通知する。

また停止位置推定部24は、注目する車両が、注目車両よりも前に位置する車両によってセンサ2により検知できなくなった場合、その検知不能となった直前の時刻において求められた推定停止位置Lxを、最終的な推定停止位置とする。これにより、停止位置推定部24は、オクルージョンが生じていても、注目する車両の停止位置を推定できる。
なお、減速判定部23により注目車両は減速したと判定される前に、例えば、注目車両がオクルージョンが発生している領域に入ることで注目車両が検知されなくなった場合、車列長推定部25は、車列長を、一つ前の車両について求めた車列長としてもよい。あるいは、車列長推定部25は、後述する車列長調整部26と同様の処理を行って、車列長を推定してもよい。
車列長調整部26は、調整後の車列長L'を次式に従って求める。
制御部15の車両検知部21は、センサ信号から車両を検知する(ステップS101)。そして車両検知部21は、最新のセンサ信号に基づいて検知された車両の位置と、過去のセンサ信号に基づいて検知された車両の位置などを用いて、車両ごとの追跡情報を更新する。
制御部15は、信号機インターフェース部12を介して信号機から取得したタイミング情報に基づいて、青信号期間が終了したか否か判定する(ステップS102)。
青信号期間の終了直後である場合(ステップS102−Yes)、制御部15の基準加速度算出部22は、検知された各車両の追跡情報に基づいて、青信号期間中における各車両の速度変化から基準加速度Astdを求める(ステップS103)。さらに基準加速度算出部22は、基準加速度Astdに基づいて減速判定閾値Athを決定する。そして基準加速度算出部22は、基準加速度Astd及び減速判定閾値Athを記憶部13に記憶する。
一方、注目車両の加速度Aintが減速判定閾値Athより低ければ(ステップS107−Yes)、減速判定部23は、注目車両は停止するために減速していると判定する。この場合、制御部15の停止位置推定部24は、注目車両の追跡情報に基づいて停止位置を推定する(ステップS108)。そして車列長推定部25は、注目車両の推定された停止位置から車間距離を減じることで車列長を推定する(ステップS109)。
ステップS109またはS110の後、制御部15は、車列長測定処理を終了する。
制御部の車両検知部は、センサから受け取った画像に写った車両を検出することにより、道路上の車両を検知する。そのために、車両検知部は、例えば、センサから受け取った画像と、記憶部に予め記憶されている、道路上を走行する車両が存在しない場合にその道路を撮影した背景画像との間で背景差分処理を実行する。そして車両検知部は、背景差分処理によって得られた差分画像上で所定の閾値以上の画素値の絶対値を持つ画素の集合を、車両が写っている領域として検出する。あるいは、車両検知部は、車両を表す少なくとも一つのテンプレートと画像との間でテンプレートマッチングを行って正規化相互相関値を求め、その正規化相互相関値が予め定められた値以上となった画像上の領域に、車両が写っていると判定する。
そして、画像上の位置と道路上の位置は、一対一に対応するので、車両検知部は、車両が検知された画像上の領域の重心位置に基づいて、センサからその検知された車両までの距離を求めることができる。
センサとしてレーダ検知器が用いられる場合、注目する車両の一部が他の車両に隠れると、その隠れた部分の大きさに応じて反射波の信号強度が低下するので、車両検知部は、注目する車両を検知し難くなる。一方、センサとして画像センサが用いられる場合、注目する車両の一部が他の車両に隠れている場合でも、車両検知部は、画像上でその注目する車両の隠されていない部分を検出することで、その車両を検知できる。そのため、センサとして画像センサを利用することにより、車列長測定装置は、オクルージョンが生じる領域を小さくできる。
例えば、車列長を測定しようとする交差点近傍の道路が平坦であり、かつ、その交差点に設置された信号機以外に、車両を停止させる要因となるものが存在しない場合には、その交差点を通過する車両は一定の速度を保つと推定される。したがって、この場合には、制御部が、一定以上減速している車両は停止すると推定されるので、減速判定閾値Athも、基準加速度に依存せずに決定できる。
また、車列長測定装置は、注目車両の加速度を求める度に、その加速度を減速判定閾値と比較することなく、注目車両の停止位置を推定し、その推定停止位置に応じて車列長を推定してもよい。この場合には、推定された注目車両の停止位置が、想定される車列の先頭の位置、例えば、停止線の位置よりも前方となる場合、車列長推定部は、車列は無いと判定する。一方、推定された注目車両の停止位置が想定される車列の先頭の位置よりも後方であれば、車列長推定部は、上記の実施形態と同様に車列長を推定すればよい。
さらに、上記の実施形態またはその変形例による車列長測定装置は、交差点に限らず、渋滞などによって車列が形成されるところ、例えば、高速道路の渋滞の頻発ポイントに設置されてもよい。
路側器30は、例えば、交差点の近傍に設置される。そして路側器30は、車両に搭載された車載通信機と無線通信可能となっている。
路側器30は、例えば、その交差点に接続される道路上に停車中の車両の列の長さを検知する。そして路側器30は、その停車中の車両の列よりも後方を走行中の車両の停止位置を推定し、その推定停止位置と車両の列の長さとを比較することで、走行中の車両が停車中の最後尾の車両に衝突する危険性があるか否かを判定する。そして路側器30は、衝突の危険性があると判定した場合、その走行中の車両に搭載された車載通信機へ、警告信号を送信する。
そのために、路側器30は、センサインターフェース部31と、信号機インターフェース部32と、記憶部33と、制御部34と、通信制御部35と、変調部36と、アンテナ37とを有する。
そしてセンサインターフェース部31は、交差点の近傍に設けられたレーダ装置またはカメラといったセンサからセンサ信号を受信し、制御部34はそのセンサ信号に基づいて注目車両を決定し、注目車両の停止位置を推定することで車列長を求める。
また制御部34は、一つ前の注目車両に基づいて求めた車列長よりも、現在の注目車両に基づいて求めた車列長の方が短い場合には、その注目車両が車列の最後尾に衝突する可能性があると判定する。そしてこの場合、制御部34は、衝突する可能性があることを示す警告情報を生成する。
このように、路側器30は、停車中の車両の列に衝突する可能性の有る車両に対して、警告を発することができる。
2 センサ
11 センサインターフェース部
12 信号機インターフェース部
13 記憶部
14 出力部
15 制御部
21 車両検知部
22 基準加速度算出部
23 減速判定部
24 停止位置推定部
25 車列長推定部
26 車列長調整部
30 路側器
31 センサインターフェース部
32 信号機インターフェース部
33 記憶部
34 制御部
35 通信制御部
36 変調部
37 アンテナ
Claims (7)
- 所定の検知範囲内の車両の前面に対向して設置されたセンサから取得したセンサ信号に基づいて車両を検知し、該検知された車両の位置及び速度を求める車両検知部と、
前記検知された車両のうち、前記センサに接近中でかつ最も近くを走行中の第1の車両の位置及び速度の変化から、当該第1の車両の停止位置を推定する停止位置推定部と、
前記推定された停止位置よりも車間距離の推定値だけ前記センサに近い位置を停車中の車両の列の最後尾と推定することで、該停車中の車両の列の長さを求める車列長推定部と、
を有する車列長測定装置。 - 前記第1の車両の位置及び速度の変化から、当該第1の車両の加速度を求め、当該加速度が減速判定閾値よりも低い場合に当該第1の車両が減速していると判定する減速判定部をさらに有し、
前記車列長推定部は、前記第1の車両が減速していると判定された場合に前記第1の車両の推定された停止位置に基づいて停車中の車両の列の長さを求める、請求項1に記載の車列長測定装置。 - 前記所定の検知範囲内に含まれる道路上の車両の通行を規制する信号機から、当該信号機の信号が切り替わるタイミングを示すタイミング情報を取得する信号機インターフェース部をさらに有し、
前記停止位置推定部は、前記タイミング情報に基づいて、前記信号機が前記道路上を前記センサへ向かって接近する方向の移動を規制する移動規制期間を特定し、当該期間内に限り、前記第1の車両の停止位置を推定する、請求項2に記載の車列長測定装置。 - 前記信号機が前記道路上を前記センサへ向かって接近する方向の移動を許可する移動許可期間内において前記車両検知部によって検知された車両の加速度に応じて前記減速判定閾値を決定する基準加速度算出部をさらに有する、請求項3に記載の車列長測定装置。
- 前記第1の車両が停止または検知されなくなってから所定の期間が経過するまでに、前記車両検知部が前記第1の車両よりも後方を走行する第2の車両を検知しない場合、前記第1の車両の推定された停止位置に基づいて求められた停車中の車両の列の長さを、車間距離の推定値と1台の車両の長さの推定値との合計だけ延長する車列長調整部をさらに有する、請求項1〜4の何れか一項に記載の車列長測定装置。
- 所定の検知範囲内の車両の前面に対向して設置されたセンサから取得したセンサ信号に基づいて車両を検知し、該検知された車両の位置及び速度を求め、
前記検知された車両のうち、前記センサに接近中でかつ最も近くを走行中の第1の車両の位置及び速度の変化から、当該第1の車両の停止位置を推定し、
前記推定された停止位置よりも車間距離の推定値だけ前記センサに近い位置を停車中の車両の列の最後尾と推定することで、該停車中の車両の列の長さを求める、
ことを含む車列長測定方法。 - 所定の検知範囲内の車両の前面に対向して設置されたセンサから取得したセンサ信号に基づいて車両を検知し、該検知された車両の位置及び速度を求め、
前記検知された車両のうち、前記センサに接近中でかつ最も近くを走行中の第1の車両の位置及び速度の変化から、当該第1の車両の停止位置を推定し、
前記推定された停止位置よりも車間距離の推定値だけ前記センサに近い位置を停車中の車両の列の最後尾と推定することで、該停車中の車両の列の長さを求める、
ことをコンピュータに実行させる車列長測定用コンピュータプログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011175083A JP5741310B2 (ja) | 2011-08-10 | 2011-08-10 | 車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム |
| EP12178089.4A EP2557551B1 (en) | 2011-08-10 | 2012-07-26 | Apparatus for measuring vehicle queue length, method for measuring vehicle queue length, and computer-readable recording medium storing computer program for measuring vehicle queue length |
| US13/561,740 US9361801B2 (en) | 2011-08-10 | 2012-07-30 | Apparatus for measuring vehicle queue length, method for measuring vehicle queue length, and computer-readable recording medium storing computer program for measuring vehicle queue length |
| KR1020120087303A KR101498765B1 (ko) | 2011-08-10 | 2012-08-09 | 차열 길이 측정 장치, 차열 길이 측정 방법 및 차열 길이 측정용 컴퓨터 프로그램을 기록한 컴퓨터 판독가능한 기록 매체 |
| KR1020150019353A KR101542032B1 (ko) | 2011-08-10 | 2015-02-09 | 차열 길이 측정 장치, 차열 길이 측정 방법 및 차열 길이 측정용 컴퓨터 프로그램을 기록한 컴퓨터 판독가능한 기록 매체 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011175083A JP5741310B2 (ja) | 2011-08-10 | 2011-08-10 | 車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013036932A JP2013036932A (ja) | 2013-02-21 |
| JP5741310B2 true JP5741310B2 (ja) | 2015-07-01 |
Family
ID=46924223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011175083A Expired - Fee Related JP5741310B2 (ja) | 2011-08-10 | 2011-08-10 | 車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9361801B2 (ja) |
| EP (1) | EP2557551B1 (ja) |
| JP (1) | JP5741310B2 (ja) |
| KR (2) | KR101498765B1 (ja) |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011125185A1 (ja) * | 2010-04-07 | 2011-10-13 | トヨタ自動車株式会社 | 車両走行支援装置 |
| WO2012144255A1 (ja) * | 2011-04-21 | 2012-10-26 | 三菱電機株式会社 | 走行支援装置 |
| US9209985B1 (en) * | 2013-01-31 | 2015-12-08 | Maritime Telecommunications Network Inc. | Association of diverse application logic across multiple distinct devices with priority bandwidth channel |
| JP6120166B2 (ja) * | 2013-06-04 | 2017-04-26 | パナソニックIpマネジメント株式会社 | 車両停止判定結果提供方法、車両停止判定装置、および車両停止判定システム |
| JP5683663B1 (ja) * | 2013-09-27 | 2015-03-11 | パナソニックIpマネジメント株式会社 | 滞留時間測定装置、滞留時間測定システムおよび滞留時間測定方法 |
| EP3114574A4 (en) * | 2014-03-03 | 2018-03-07 | Inrix, Inc. | Traffic obstruction detection |
| CN103985251B (zh) * | 2014-04-21 | 2016-03-02 | 东南大学 | 一种车辆排队长度测算的方法及系统 |
| US9759812B2 (en) * | 2014-10-02 | 2017-09-12 | Trimble Inc. | System and methods for intersection positioning |
| US10366604B1 (en) * | 2014-12-12 | 2019-07-30 | Robert Joseph Bermudez | Taxi information system |
| GB2555029A (en) * | 2015-05-19 | 2018-04-18 | Wal Mart Stores Inc | Measurement system and method |
| US11087291B2 (en) * | 2015-11-24 | 2021-08-10 | Honda Motor Co., Ltd.. | Action planning and execution support device |
| EP3236446B1 (en) * | 2016-04-22 | 2022-04-13 | Volvo Car Corporation | Arrangement and method for providing adaptation to queue length for traffic light assist-applications |
| KR101677593B1 (ko) * | 2016-07-14 | 2016-11-18 | 국방과학연구소 | 저감속 회수장치를 위한 감가속도 이력 계측장치 |
| CN106097730B (zh) * | 2016-08-10 | 2018-08-21 | 青岛海信网络科技股份有限公司 | 一种路段车辆排队长度的估计方法、装置及系统 |
| US10181263B2 (en) | 2016-11-29 | 2019-01-15 | Here Global B.V. | Method, apparatus and computer program product for estimation of road traffic condition using traffic signal data |
| CN106781542B (zh) * | 2016-12-30 | 2020-01-31 | 迈锐数据(北京)有限公司 | 一种车辆排队长度检测系统、方法和装置 |
| CN106920403B (zh) * | 2017-03-12 | 2019-10-29 | 浙江大学 | 一种基于阵列雷达的单点自适应控制方法 |
| CN107464427B (zh) * | 2017-07-17 | 2019-09-10 | 东南大学 | 一种排队车辆长度检测系统和方法 |
| US10825344B2 (en) * | 2018-02-01 | 2020-11-03 | GM Global Technology Operations LLC | System and method for forming a fleet and positioning vehicles in the fleet |
| JP7201340B2 (ja) * | 2018-05-24 | 2023-01-10 | 株式会社Nttドコモ | 車群決定装置及び車群決定システム |
| CN108806282B (zh) * | 2018-06-01 | 2020-09-04 | 浙江大学 | 基于样本行程时间信息的车道组最大排队长度估计方法 |
| CN109035814B (zh) * | 2018-07-02 | 2021-04-09 | 福建榕基软件股份有限公司 | 一种红绿灯间隔时间自动调整方法和系统 |
| CN109064098B (zh) * | 2018-08-09 | 2021-11-23 | 圆通速递有限公司 | 一种车辆动态调度方法和系统 |
| CN110689738A (zh) * | 2019-09-24 | 2020-01-14 | 北京地平线机器人技术研发有限公司 | 交通信号灯的控制方法和装置、存储介质、电子设备 |
| CN110751826B (zh) * | 2019-10-30 | 2021-07-06 | 浙江大华技术股份有限公司 | 车辆排队确定方法以及相关装置 |
| CN112802325B (zh) * | 2019-11-13 | 2023-06-27 | 阿波罗智联(北京)科技有限公司 | 车辆排队长度检测方法及装置 |
| CN111145566B (zh) * | 2019-12-19 | 2022-04-01 | 南京理工大学 | 一种智能交通灯系统及控制方法 |
| CN111882858B (zh) * | 2020-06-01 | 2022-05-20 | 重庆大学 | 一种基于多源数据的高速公路异常事件排队长度预测方法 |
| CN111696367B (zh) * | 2020-06-11 | 2022-06-07 | 西安电子科技大学 | 多地磁传感器测速系统及其测速方法 |
| CN112085950B (zh) * | 2020-08-17 | 2021-10-29 | 西安电子科技大学 | 交通状态判别指标的估计方法、系统、存储介质及应用 |
| JP7157780B2 (ja) * | 2020-08-27 | 2022-10-20 | 本田技研工業株式会社 | 自動運転車用情報提示装置 |
| EP4256545A1 (en) * | 2020-12-04 | 2023-10-11 | Viavi Solutions Inc. | Distributed acoustic sensing of traffic |
| CN112712694B (zh) * | 2020-12-24 | 2023-05-05 | 重庆中信科信息技术有限公司 | 一种基于时空分析的偶发性拥堵识别分析方法 |
| CN112904838B (zh) * | 2021-01-06 | 2021-11-26 | 北京科技大学 | 二维平面智能车辆队列控制方法 |
| CN112859062B (zh) * | 2021-01-19 | 2023-11-24 | 巍泰技术(武汉)有限公司 | 一种基于雷达的车辆排队长度检测方法及系统 |
| US11935404B2 (en) * | 2021-03-24 | 2024-03-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | Integrated congested mitigation for freeway non-recurring queue avoidance |
| CN115223353A (zh) * | 2021-04-21 | 2022-10-21 | 北京航迹科技有限公司 | 车队中车辆的定位方法及装置 |
| CN113129595B (zh) * | 2021-04-23 | 2022-06-10 | 山东金宇信息科技集团有限公司 | 一种用于道路交叉口的交通信号控制方法、设备及介质 |
| DE102021005661A1 (de) | 2021-11-16 | 2022-02-03 | Daimler Ag | Fahrzeug-Radar zur Erkennung vorausfahrender Kolonnen |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11110685A (ja) * | 1997-10-08 | 1999-04-23 | Mitsubishi Electric Corp | 交通管制支援システム |
| DE19953008A1 (de) * | 1999-10-27 | 2001-05-03 | Johann F Hipp | Vorrichtung zur Steuerung des Verkehrsflusses an einer Kreuzung, insbesondere zur Ampelsteuerung |
| JP2002150480A (ja) * | 2000-11-15 | 2002-05-24 | Yazaki Corp | 交通信号機制御システム |
| JP2002183887A (ja) * | 2000-12-12 | 2002-06-28 | Nissan Motor Co Ltd | 車両発進報知装置 |
| KR100459476B1 (ko) * | 2002-04-04 | 2004-12-03 | 엘지산전 주식회사 | 차량의 대기 길이 측정 장치 및 방법 |
| US7860639B2 (en) * | 2003-02-27 | 2010-12-28 | Shaoping Yang | Road traffic control method and traffic facilities |
| US7821422B2 (en) * | 2003-08-18 | 2010-10-26 | Light Vision Systems, Inc. | Traffic light signal system using radar-based target detection and tracking |
| US7663505B2 (en) * | 2003-12-24 | 2010-02-16 | Publicover Mark W | Traffic management device and system |
| JP2007011557A (ja) * | 2005-06-29 | 2007-01-18 | Nissan Motor Co Ltd | 渋滞検出システム、車載情報端末、および情報センター、および渋滞検出方法 |
| JP4720457B2 (ja) | 2005-11-22 | 2011-07-13 | アイシン・エィ・ダブリュ株式会社 | 車両の運転支援方法及び運転支援装置 |
| CN103413231B (zh) * | 2006-03-16 | 2017-10-27 | 比凯特有限责任公司 | 在移动物体上显示高度相关广告而获得收益的系统和方法 |
| JP4743523B2 (ja) * | 2006-03-22 | 2011-08-10 | 住友電気工業株式会社 | 交差点における車両挙動の予測システム |
| JP5003546B2 (ja) * | 2007-06-07 | 2012-08-15 | 住友電気工業株式会社 | 交通信号制御システム、交通信号制御装置及び方法、並びに、交通指標算出装置 |
| US20090088916A1 (en) * | 2007-09-28 | 2009-04-02 | Honeywell International Inc. | Method and system for automatic path planning and obstacle/collision avoidance of autonomous vehicles |
| GB0802205D0 (en) * | 2008-02-06 | 2008-03-12 | Hatton Traffic Man Ltd | Traffic control system |
| EP2187369A3 (en) * | 2008-06-04 | 2012-03-28 | Roads and Traffic Authority of New South Wales | Traffic signals control system |
| WO2009150528A2 (en) * | 2008-06-13 | 2009-12-17 | Tmt Services And Supplies (Pty) Limited | Traffic control system and method |
| JP5256923B2 (ja) | 2008-08-11 | 2013-08-07 | 住友電気工業株式会社 | 信号待ち行列情報生成装置、コンピュータプログラム及び信号待ち行列情報生成方法 |
| US8279086B2 (en) * | 2008-09-26 | 2012-10-02 | Regents Of The University Of Minnesota | Traffic flow monitoring for intersections with signal controls |
| WO2010042973A1 (en) * | 2008-10-15 | 2010-04-22 | National Ict Australia Limited | Tracking the number of vehicles in a queue |
| JP5343637B2 (ja) * | 2009-03-09 | 2013-11-13 | オムロン株式会社 | 信号制御装置 |
| JP5439004B2 (ja) * | 2009-03-30 | 2014-03-12 | 株式会社サイデン | 渋滞検知装置及びプログラム |
| CN103026395A (zh) * | 2010-11-15 | 2013-04-03 | 图像传感系统有限公司 | 混合交通传感器系统和相关的方法 |
-
2011
- 2011-08-10 JP JP2011175083A patent/JP5741310B2/ja not_active Expired - Fee Related
-
2012
- 2012-07-26 EP EP12178089.4A patent/EP2557551B1/en not_active Not-in-force
- 2012-07-30 US US13/561,740 patent/US9361801B2/en not_active Expired - Fee Related
- 2012-08-09 KR KR1020120087303A patent/KR101498765B1/ko not_active IP Right Cessation
-
2015
- 2015-02-09 KR KR1020150019353A patent/KR101542032B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| KR101498765B1 (ko) | 2015-03-04 |
| US20130041573A1 (en) | 2013-02-14 |
| EP2557551A1 (en) | 2013-02-13 |
| US9361801B2 (en) | 2016-06-07 |
| KR20130018161A (ko) | 2013-02-20 |
| JP2013036932A (ja) | 2013-02-21 |
| KR20150023612A (ko) | 2015-03-05 |
| KR101542032B1 (ko) | 2015-08-04 |
| EP2557551B1 (en) | 2017-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5741310B2 (ja) | 車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム | |
| CN107993487B (zh) | 避让紧急车辆的方法及装置 | |
| JP5267517B2 (ja) | 車両位置推定装置、および車両位置推定プログラム | |
| CN105984448A (zh) | 自主紧急制动系统及其控制方法 | |
| JP5482670B2 (ja) | 物体検出装置 | |
| KR101319550B1 (ko) | 차량속도 표시장치 | |
| US20220343757A1 (en) | Information processing apparatus, information processing system, and information processing method | |
| JP2019207654A (ja) | 検知装置及び検知システム | |
| JP2008299758A (ja) | 車両運転支援システム、運転支援装置、車両及び車両運転支援方法 | |
| WO2018216066A1 (ja) | 車載装置、走行支援方法および走行支援プログラム | |
| KR101979928B1 (ko) | 전방 차량 거리 추정 시스템 및 방법 | |
| KR101489886B1 (ko) | 스마트 시그널을 이용한 열차 제어 시스템 | |
| KR101316306B1 (ko) | 차량의 스마트 크루즈 컨트롤 시스템 및 그 제어방법 | |
| JP2004295620A (ja) | 車両衝突可能性検出装置 | |
| CN115497282B (zh) | 信息处理装置、信息处理方法、以及存储介质 | |
| US20200369266A1 (en) | Signal processing apparatus, signal processing method, and program | |
| TWI541151B (zh) | 車輛碰撞偵測系統與方法 | |
| KR101891920B1 (ko) | 보행자 인식 시스템, 자동 순항 제어장치 및 그 방법 | |
| JP5783163B2 (ja) | 物標検出装置 | |
| KR20100068807A (ko) | 차량 충돌 방지 장치 및 방법 | |
| EP0860804A2 (en) | System for the detection and the signalling of objects on the roadway | |
| JP2011258056A (ja) | 車両制御装置および車両制御システム | |
| US20220020272A1 (en) | Information processing apparatus, information processing method, and program | |
| JP2012027605A (ja) | 他車認識システム | |
| JP5463723B2 (ja) | 車両用の情報提供装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140404 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150312 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150331 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150413 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5741310 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |