JP5716634B2 - ハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- JP5716634B2 JP5716634B2 JP2011236198A JP2011236198A JP5716634B2 JP 5716634 B2 JP5716634 B2 JP 5716634B2 JP 2011236198 A JP2011236198 A JP 2011236198A JP 2011236198 A JP2011236198 A JP 2011236198A JP 5716634 B2 JP5716634 B2 JP 5716634B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- parking
- electric motor
- engine
- hybrid vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
上記の目的を達成するために講じられた本発明の概要は、動力伝達経路における異音(歯打ち音等)の発生を防止するための押し当てトルクの作用方向として、内燃機関が冷間状態にある場合には、内燃機関の運転状態が切り換わったとしても押し当てトルクの作用方向を変更しないようにし、一時的に異音が発生してしまうといった状況を招かないようにしている。
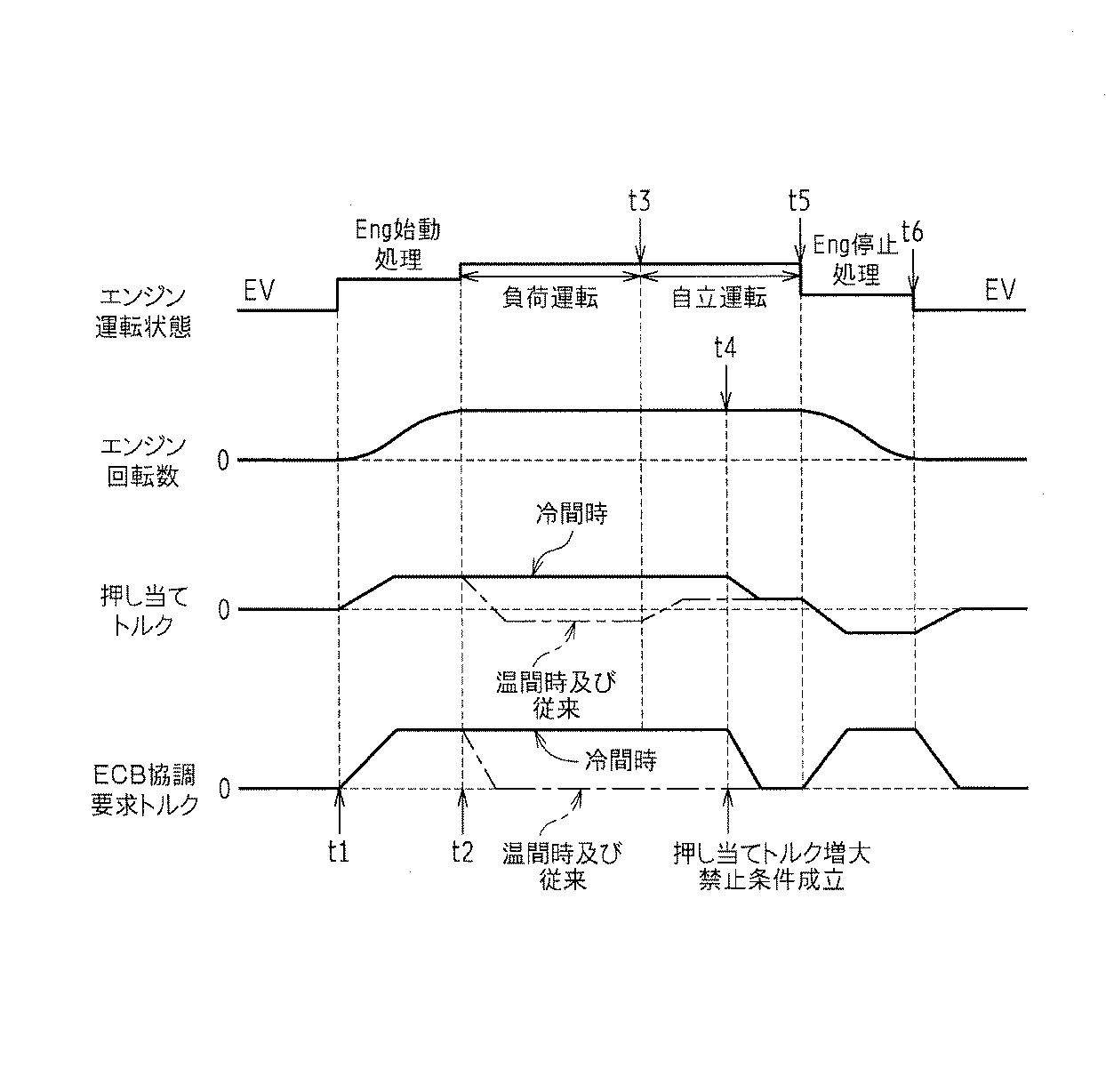
具体的に、本発明は、走行用駆動力源として内燃機関及び電動機を備え、シフト操作装置の操作状態が駐車ポジションにあり、車両が停車している状態で上記内燃機関が駆動している場合に、上記電動機からのトルクを動力伝達系に与えることによって、この動力伝達系での異音の発生を低減または防止する異音低減制御を実行するハイブリッド車両の制御装置を前提とする。このハイブリッド車両の制御装置に対し、上記内燃機関の温間時には、この内燃機関の運転状態が負荷運転状態と自立運転状態との間で切り換わったことに伴い、上記異音低減制御において上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を切り換える一方、上記内燃機関の冷間時には、この内燃機関の運転状態が上記負荷運転状態と上記自立運転状態との間で切り換わっても上記異音低減制御において上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を一方向に維持する構成としている。
また、負荷運転として具体的には、蓄電装置(バッテリ)の残容量(SOC)が所定量未満に達したことで充電要求が生じた場合における内燃機関の運転状態が挙げられる。また、自立運転として具体的には、車室内の暖房要求に応じ、内燃機関を熱源として用いる必要がある場合における内燃機関の運転状態が挙げられる。
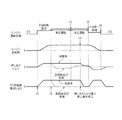
次に、本実施形態の特徴とする動作として、ハイブリッド車両1の停車中にシフト操作装置60がPポジションへ操作された場合に行われる押し当てトルク制御について具体的に説明する。
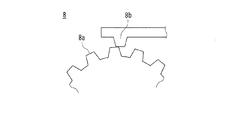
次に、上述した押し当てトルク増大禁止条件の一つである路面勾配の判定手法について説明する。これは、図5に示すように、仮にパーキングロックポール8bがパーキングギヤ8aに噛み合っていない状況において、降坂路で、車両が前進する側の回転方向への押し当てトルクを増大させたことによってパーキングロックポール8bがパーキングギヤ8aに噛み合うことができなくなるといった状況を回避するための判定動作である。つまり、パーキングギヤ8aが回転して、パーキングロックポール8bがパーキングギヤ8aの溝に対向する位置に達した時点でのパーキングギヤ8aの回転速度が所定速度以上になっている場合には、パーキングロックポール8bがパーキングギヤ8aの溝に嵌り込むことができなくなる可能性がある。そして、上記押し当てトルク増大制御を実行したことでこのような状況が発生すると推測される場合には押し当てトルク増大制御を禁止し、パーキングロックポール8bがパーキングギヤ8aの溝に嵌り込むことを可能にするために路面勾配を判定するようにしている。以下、図6を参照しながら具体的に説明する。
次に、シフト操作装置60がPポジションから非Pポジションへ操作されたことでトルクの増大禁止条件が成立した場合の具体的な動作について説明する。
以上説明した実施形態では、FF(フロントエンジン・フロントドライブ)方式のハイブリッド車両の制御に本発明を適用した例を示したが、本発明はこれに限られることなく、FR(フロントエンジン・リアドライブ)方式のハイブリッド車両や、4輪駆動方式のハイブリッド車両の制御にも適用できる。
2 エンジン(内燃機関)
2a クランクシャフト(内燃機関の出力軸)
3 動力分割機構
3a サンギヤ
3b リングギヤ
3d キャリア
8 パーキングロック機構
8a パーキングギヤ
8b パーキングロックポール
10 ハイブリッドECU
14 パーキングECU
20 モータECU
30 ブレーキECU
31 ブレーキアクチュエータ
34a,34b 油圧ブレーキ
55 水温センサ
6a,6b 前輪(駆動輪)
60 シフト操作装置
61 シフトレバー
62 Pスイッチ
MG1 第1モータジェネレータ(第1の電動機)
MG2 第2モータジェネレータ(第2の電動機)
Claims (9)
- 走行用駆動力源として内燃機関及び電動機を備え、シフト操作装置の操作状態が駐車ポジションにあり、車両が停車している状態で上記内燃機関が駆動している場合に、上記電動機からのトルクを動力伝達系に与えることによって、この動力伝達系での異音の発生を低減または防止する異音低減制御を実行するハイブリッド車両の制御装置において、
上記内燃機関の温間時には、この内燃機関の運転状態が負荷運転状態と自立運転状態との間で切り換わったことに伴い、上記異音低減制御において上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を切り換える一方、上記内燃機関の冷間時には、この内燃機関の運転状態が上記負荷運転状態と上記自立運転状態との間で切り換わっても上記異音低減制御において上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を一方向に維持する構成とされていることを特徴とするハイブリッド車両の制御装置。 - 請求項1記載のハイブリッド車両の制御装置において、
上記異音低減制御において、上記内燃機関の冷間時における上記電動機から上記動力伝達系に与えられる上記トルクは、上記内燃機関の温間時における上記電動機から上記動力伝達系に与えられる上記トルクよりも大きく設定されていることを特徴とするハイブリッド車両の制御装置。 - 請求項1または2記載のハイブリッド車両の制御装置において、
上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を一方向に維持する制御は、所定の条件が成立した場合に解除または禁止される構成となっていることを特徴とするハイブリッド車両の制御装置。 - 請求項3記載のハイブリッド車両の制御装置において、
上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を一方向に維持する制御の解除条件は、上記シフト操作装置がパーキング状態から非パーキング状態に操作された場合に成立することを特徴とするハイブリッド車両の制御装置。 - 請求項4記載のハイブリッド車両の制御装置において、
上記シフト操作装置が上記パーキング状態から上記非パーキング状態に操作された場合、上記電動機から上記動力伝達系に与えられる上記トルクが所定値に低下するまでは、単位時間当たりのトルク減少量を大きく設定する一方、上記トルクが上記所定値に低下した後、単位時間当たりのトルク減少量を小さく設定することを特徴とするハイブリッド車両の制御装置。 - 請求項3記載のハイブリッド車両の制御装置において、
上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を一方向に維持する制御の禁止条件は、上記車両が停車している路面の勾配が所定勾配を超えている場合に成立することを特徴とするハイブリッド車両の制御装置。 - 請求項6記載のハイブリッド車両の制御装置において、
パーキングギヤに対してパーキングロックポールを噛み合わせることにより駆動輪を停止させるパーキングロック機構を備えており、
上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を一方向に維持する制御の禁止条件は、上記パーキングギヤに対して上記パーキングロックポールが噛み合っていない状態から噛み合い可能な位置まで上記パーキングギヤが回転した際における上記パーキングギヤの回転速度が上記パーキングロックポールの噛み合いが不能な所定速度以上になる車速となる路面勾配を超えている場合に成立することを特徴とするハイブリッド車両の制御装置。 - 請求項1〜7のうち何れか一つに記載のハイブリッド車両の制御装置において、
上記走行用駆動力源からの駆動力を受ける駆動輪には、この駆動輪の回転を阻止する制動力を発生するブレーキ装置が設けられており、
上記電動機から上記動力伝達系に与えられる上記トルクの作用方向を一方向に維持する制御の実行時において、上記電動機から上記動力伝達系に与えられる上記トルクの大きさが変化しても、上記ブレーキ装置による上記駆動輪への制動力は一定に維持される構成となっていることを特徴とするハイブリッド車両の制御装置。 - 請求項1〜8のうち何れか一つに記載のハイブリッド車両の制御装置において、
上記内燃機関の出力軸が連結されるプラネタリキャリアと、第1の電動機が連結されるサンギヤと、第2の電動機が連結されるリングギヤとを備えた遊星歯車機構により構成される動力分割機構を備えており、上記異音低減制御では、上記第2の電動機からのトルクにより上記動力伝達系での異音の発生を低減または防止する構成となっていることを特徴とするハイブリッド車両の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011236198A JP5716634B2 (ja) | 2011-10-27 | 2011-10-27 | ハイブリッド車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011236198A JP5716634B2 (ja) | 2011-10-27 | 2011-10-27 | ハイブリッド車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013091471A JP2013091471A (ja) | 2013-05-16 |
| JP5716634B2 true JP5716634B2 (ja) | 2015-05-13 |
Family
ID=48614937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011236198A Active JP5716634B2 (ja) | 2011-10-27 | 2011-10-27 | ハイブリッド車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5716634B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6146373B2 (ja) * | 2014-06-06 | 2017-06-14 | トヨタ自動車株式会社 | ハイブリッド車両用駆動装置の制御装置 |
| CN107735761B (zh) | 2015-07-17 | 2022-03-04 | 克朗设备公司 | 用于工业车辆的具有图形用户界面的处理设备 |
| CA3039802A1 (en) | 2016-11-22 | 2018-05-31 | Crown Equipment Corporation | User interface device for industrial vehicle |
| JP7459686B2 (ja) * | 2020-06-30 | 2024-04-02 | 株式会社デンソー | 車両の制御装置、プログラム |
| JP7743792B2 (ja) * | 2022-01-11 | 2025-09-25 | トヨタ自動車株式会社 | 車両制御システム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4079005B2 (ja) * | 2003-02-20 | 2008-04-23 | トヨタ自動車株式会社 | 電動機の制御装置 |
| JP4222349B2 (ja) * | 2005-08-25 | 2009-02-12 | トヨタ自動車株式会社 | ハイブリッド車およびその制御方法 |
| JP4345791B2 (ja) * | 2006-09-14 | 2009-10-14 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP2008126809A (ja) * | 2006-11-20 | 2008-06-05 | Toyota Motor Corp | 動力出力装置およびこれを搭載する車両並びに内燃機関の制御方法 |
| JP2009030637A (ja) * | 2007-07-24 | 2009-02-12 | Toyota Motor Corp | パーキング機構の制御装置 |
| JP5120187B2 (ja) * | 2008-10-01 | 2013-01-16 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP2010247605A (ja) * | 2009-04-14 | 2010-11-04 | Toyota Motor Corp | 車両駆動制御システム |
| JP2010254127A (ja) * | 2009-04-24 | 2010-11-11 | Toyota Motor Corp | ハイブリッド車両 |
| US9260110B2 (en) * | 2010-03-01 | 2016-02-16 | Toyota Jidosha Kabushiki Kaisha | Control device of vehicle power transmission device |
-
2011
- 2011-10-27 JP JP2011236198A patent/JP5716634B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013091471A (ja) | 2013-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5610091B2 (ja) | 変速指示装置 | |
| JP5786962B2 (ja) | プラグインハイブリッド車両 | |
| JP5854052B2 (ja) | 車両の制御装置 | |
| CN103171449B (zh) | 插电式混合动力车辆 | |
| CN101636303B (zh) | 混合动力汽车及其控制方法 | |
| CN101663187B (zh) | 车辆及其控制方法 | |
| CN105377654B (zh) | 混合动力车辆的控制装置 | |
| CN100484793C (zh) | 驻车止动爪啮合控制 | |
| CN101342905A (zh) | 用于混合动力车辆的控制装置 | |
| CN102653238A (zh) | 车辆控制装置以及车辆控制方法 | |
| JP6428672B2 (ja) | 車両用駆動装置の制御装置 | |
| JP5825115B2 (ja) | プラグインハイブリッド車両 | |
| US9216726B2 (en) | Vehicle and control method for vehicle | |
| JP2013141858A (ja) | ハイブリッド車両の制御装置 | |
| JP5716634B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5282708B2 (ja) | ハイブリッド車両およびその制御方法 | |
| JP5757256B2 (ja) | 変速指示装置 | |
| JP6048154B2 (ja) | ハイブリッド車両の動力伝達装置及びハイブリッドシステム | |
| JP5895353B2 (ja) | ハイブリッド車 | |
| JP4039427B2 (ja) | 自動車及びその制御方法 | |
| JP6561978B2 (ja) | ハイブリッド車両およびその制御方法 | |
| JP2013103593A (ja) | ハイブリッド車両の制御装置 | |
| JP2012239282A (ja) | 車両およびその制御方法 | |
| JP5541151B2 (ja) | ハイブリッド自動車 | |
| JP2013132945A (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150217 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150302 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5716634 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |