JP5376707B2 - レーザアニール装置 - Google Patents
レーザアニール装置 Download PDFInfo
- Publication number
- JP5376707B2 JP5376707B2 JP2008013766A JP2008013766A JP5376707B2 JP 5376707 B2 JP5376707 B2 JP 5376707B2 JP 2008013766 A JP2008013766 A JP 2008013766A JP 2008013766 A JP2008013766 A JP 2008013766A JP 5376707 B2 JP5376707 B2 JP 5376707B2
- Authority
- JP
- Japan
- Prior art keywords
- mirror
- laser
- angle
- deviation
- respect
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/08—Devices involving relative movement between laser beam and workpiece
- B23K26/083—Devices involving movement of the workpiece in at least one axial direction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/04—Automatically aligning, aiming or focusing the laser beam, e.g. using the back-scattered light
- B23K26/042—Automatically aligning the laser beam
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/06—Shaping the laser beam, e.g. by masks or multi-focusing
- B23K26/073—Shaping the laser spot
- B23K26/0738—Shaping the laser spot into a linear shape
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- Mechanical Engineering (AREA)
- Recrystallisation Techniques (AREA)
Description
また、上記特許文献2のドリフト補正装置41では、光共振器の少なくとも一方の反射鏡の配向を変えるが、このような操作では光共振器内のビームの伝搬特性が変化し、例えばレーザ出力に大きな影響を与えるため、実現性に乏しい。
また、上記特許文献2の手段と異なり、ビーム整形光学系を通過する前のレーザビームについて位置ずれと角度ずれを検出するので、基板照射用のビームホモジナイザとは別系統のビーム整形器を備える必要がなく、比較的簡単な機器構成で位置ずれと角度ずれを検出することができる。
また、上記特許文献2の手段と異なり、レーザ発振器と被照射物の間の光路上に配置された偏向ミラーを動作させてドリフトを補正するので、光共振器内のビーム伝搬特性に影響を与えることがない。
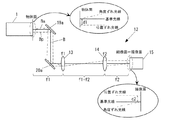
図1において、レーザアニール装置10は、レーザ発振器1と、導入ミラー8と、ビーム整形光学系5と、落射ミラー9と、基板ステージ6とを備える。
レーザ媒質2としては、固体レーザ媒質、ガスレーザ媒質、レーザダイオードが例示される。固体レーザ媒質としては、YAG、YLF、YVO4等が例示される。ガスレーザ媒質としては、エキシマ、CO2等が例示される。
光共振器3は、レーザ媒質2の両側に配置された一対の反射鏡3a,3bからなる。後側の反射鏡3aは全反射ミラーであり、出射側の反射鏡3bはハーフミラーである。
上記構成のレーザ発振器1により、一対の反射鏡3a,3bの間で光が増幅されレーザビームBが発振される。レーザビームBは、連続発振ビーム、パルス発振ビームのいずれでもよい。
このような線状ビームLBを整形するビーム整形光学系5としては、従来周知の構成を採用することができる。ビーム整形光学系5は、例えば、ビームエキスパンダ、シリンドリカルレンズ、シリンドリカルレンズアレイ等で構成することができる。
基板ステージ6は、基板7を載せる上面を有し、線状ビームLBの短軸方向と一致する図中の矢印X方向に移動可能に構成されている。したがって、基板7を基板ステージ6上に載せて、X方向に移動させることにより、所望の領域に線状ビームLBを走査することができる。
角度ずれ検出器16は、ビーム整形光学系5を通過する前のレーザビームBについて、線状ビームLBの短軸方向に対応する方向に関しての基準角度からの角度ずれを検出する。
ミラー制御手段(21,22)は、位置ずれ検出器12及び角度ずれ検出器16で検出した検出データに基づいて、被照射面での線状ビームLBの短軸方向の基準照射位置からの位置ずれをなくすように、偏向ミラー8bの向きを制御する。
偏向ミラー8bは、線状ビームLBの長軸方向と一致する軸心aまわりに揺動自在に支持されている。ミラー駆動装置21は、この偏向ミラー8bに作用してその配向角度を変化させる。ミラー駆動装置21は、例えばACサーボモータで構成することができる。
上記の構成により、レーザビームBの位置ずれ及び角度ずれをリアルタイムで検出し、偏向ミラー8bの配向角度を自動制御するので、被照射面でのドリフト補正をリアルタイムで実行することができる。
LB 線状ビーム
1 レーザ発振器
2 レーザ媒質
3 光共振器
3a,3b 反射鏡
5 ビーム整形光学系
6 基板ステージ
7 基板(被照射物)
8 導入ミラー
8a,8b 偏向ミラー
9 落射ミラー
10 レーザアニール装置
12 位置ずれ検出器
13 第1レンズ
14 第2レンズ
15 第1撮像装置
16 角度ずれ検出器
17 第3レンズ
18 第2撮像装置
19a,19b ビームスプリッタ
20a,20b 偏向ミラー
21 ミラー駆動装置
22 ミラー角度制御装置
Claims (2)
- レーザ発振器から発振されたレーザビームをビーム整形光学系により線状の断面形状をもつビームに整形し、この線状ビームを被照射物に照射して前記被照射物をアニール処理するレーザアニール装置において、
前記ビーム整形光学系を通過する前のレーザビームについて、前記線状ビームの短軸方向に対応する方向に関しての基準位置からの位置ずれを検出する位置ずれ検出器と、
前記ビーム整形光学系を通過する前のレーザビームについて、前記線状ビームの短軸方向に対応する方向に関しての基準角度からの角度ずれを検出する角度ずれ検出器と、
前記レーザ発振器と前記被照射物の間の光路上に配置され前記レーザビームを偏向させる偏向ミラーと、
前記位置ずれ検出器及び前記角度ずれ検出器で検出した検出データに基づいて、被照射面での前記線状ビームの短軸方向の基準照射位置からの位置ずれをなくすように、前記偏向ミラーの向きを制御するミラー制御手段と、
を備えるレーザアニール装置であって、
前記ミラー制御手段は、前記偏向ミラーを揺動させるミラー駆動装置と、該ミラー駆動装置の動作を制御するミラー角度制御装置とを備え、
該ミラー角度制御装置は、前記レーザビームの位置ずれに対する被照射面での基準照射位置からの位置ずれを示す位置用補正テーブル、前記レーザビームの角度ずれに対する被照射面での基準照射位置からの位置ずれを示す角度用補正テーブル及び前記偏向ミラーの配向角度に対する被照射面でのビーム移動量を示すミラー用補正テーブルを記憶しており、前記位置用補正テーブル、前記角度用補正テーブル及び前記ミラー用補正テーブルを用いて、被照射面での線状ビームの短軸方向の位置ずれをなくすための前記偏向ミラーの配向角度を算出することを特徴とするレーザアニール装置。 - 前記偏向ミラーは、前記ビーム整形光学系よりも上流側の光路上に配置されている請求項1に記載のレーザアニール装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008013766A JP5376707B2 (ja) | 2008-01-24 | 2008-01-24 | レーザアニール装置 |
| US12/355,871 US8106341B2 (en) | 2008-01-24 | 2009-01-19 | Laser annealing apparatus and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008013766A JP5376707B2 (ja) | 2008-01-24 | 2008-01-24 | レーザアニール装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009176934A JP2009176934A (ja) | 2009-08-06 |
| JP2009176934A5 JP2009176934A5 (ja) | 2011-02-24 |
| JP5376707B2 true JP5376707B2 (ja) | 2013-12-25 |
Family
ID=41012444
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008013766A Expired - Fee Related JP5376707B2 (ja) | 2008-01-24 | 2008-01-24 | レーザアニール装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8106341B2 (ja) |
| JP (1) | JP5376707B2 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE46672E1 (en) | 2006-07-13 | 2018-01-16 | Velodyne Lidar, Inc. | High definition LiDAR system |
| CN102513701B (zh) | 2008-01-07 | 2015-08-19 | 株式会社Ihi | 激光退火方法以及装置 |
| US8115137B2 (en) * | 2008-06-12 | 2012-02-14 | Ihi Corporation | Laser annealing method and laser annealing apparatus |
| JP5316124B2 (ja) * | 2009-03-13 | 2013-10-16 | 日産自動車株式会社 | レーザー溶接装置 |
| US20120097833A1 (en) * | 2010-10-22 | 2012-04-26 | Industrial Technology Research Institute | Laser scanning device |
| US8669507B2 (en) * | 2010-10-22 | 2014-03-11 | Industrial Technology Research Institute | Laser scanning device |
| US10627490B2 (en) | 2016-01-31 | 2020-04-21 | Velodyne Lidar, Inc. | Multiple pulse, LIDAR based 3-D imaging |
| WO2017164989A1 (en) | 2016-03-19 | 2017-09-28 | Velodyne Lidar, Inc. | Integrated illumination and detection for lidar based 3-d imaging |
| US10804407B2 (en) | 2016-05-12 | 2020-10-13 | Semiconductor Energy Laboratory Co., Ltd. | Laser processing apparatus and stack processing apparatus |
| WO2017210418A1 (en) | 2016-06-01 | 2017-12-07 | Velodyne Lidar, Inc. | Multiple pixel scanning lidar |
| KR102603393B1 (ko) * | 2016-12-06 | 2023-11-17 | 삼성디스플레이 주식회사 | 레이저 가공 장치 |
| JP6496340B2 (ja) * | 2017-03-17 | 2019-04-03 | ファナック株式会社 | スキャナ制御装置、ロボット制御装置及びリモートレーザ溶接ロボットシステム |
| CA3057988A1 (en) | 2017-03-31 | 2018-10-04 | Velodyne Lidar, Inc. | Integrated lidar illumination power control |
| EP3612798A4 (en) | 2017-05-08 | 2021-01-13 | Velodyne Lidar, Inc. | LIDAR DATA ACQUISITION AND ORDER |
| US11294041B2 (en) * | 2017-12-08 | 2022-04-05 | Velodyne Lidar Usa, Inc. | Systems and methods for improving detection of a return signal in a light ranging and detection system |
| US11971507B2 (en) | 2018-08-24 | 2024-04-30 | Velodyne Lidar Usa, Inc. | Systems and methods for mitigating optical crosstalk in a light ranging and detection system |
| US10712434B2 (en) | 2018-09-18 | 2020-07-14 | Velodyne Lidar, Inc. | Multi-channel LIDAR illumination driver |
| US11082010B2 (en) | 2018-11-06 | 2021-08-03 | Velodyne Lidar Usa, Inc. | Systems and methods for TIA base current detection and compensation |
| US11885958B2 (en) | 2019-01-07 | 2024-01-30 | Velodyne Lidar Usa, Inc. | Systems and methods for a dual axis resonant scanning mirror |
| US12061263B2 (en) | 2019-01-07 | 2024-08-13 | Velodyne Lidar Usa, Inc. | Systems and methods for a configurable sensor system |
| US10613203B1 (en) | 2019-07-01 | 2020-04-07 | Velodyne Lidar, Inc. | Interference mitigation for light detection and ranging |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4504147A (en) * | 1981-07-28 | 1985-03-12 | Huang Cheng Chung | Angular alignment sensor |
| JPH0373914A (ja) * | 1989-08-16 | 1991-03-28 | Toshiba Corp | 光軸調整装置 |
| JP3248109B2 (ja) * | 1990-11-02 | 2002-01-21 | ソニー株式会社 | ステップアンドリピート式のレーザ結晶化方法及びレーザ光照射方法 |
| JPH11162868A (ja) * | 1997-12-02 | 1999-06-18 | Toshiba Corp | レ−ザ照射装置 |
| JPH11251220A (ja) * | 1998-03-02 | 1999-09-17 | Nikon Corp | 露光装置及び露光方法 |
| JP2000042777A (ja) | 1998-07-29 | 2000-02-15 | Sumitomo Heavy Ind Ltd | レーザビームのドリフト補正装置及びこれを用いたレーザ加工装置、並びに加工用レーザビームのドリフト補正方法 |
| JP4180718B2 (ja) * | 1999-01-29 | 2008-11-12 | 株式会社トプコン | 回転レーザ装置 |
| JP2001102323A (ja) * | 1999-09-30 | 2001-04-13 | Matsushita Electric Ind Co Ltd | レーザアニール装置および薄膜トランジスタの製造方法 |
| JP2002158186A (ja) | 2000-11-21 | 2002-05-31 | Toshiba Corp | レーザアニール方法およびその装置 |
| JP2003045820A (ja) | 2001-07-30 | 2003-02-14 | Semiconductor Energy Lab Co Ltd | レーザ照射装置およびレーザ照射方法、並びに半導体装置の作製方法 |
| JP3947065B2 (ja) | 2002-08-30 | 2007-07-18 | 住友重機械工業株式会社 | 均一化レーザビーム照射装置 |
| JP4567984B2 (ja) * | 2004-01-30 | 2010-10-27 | 株式会社 日立ディスプレイズ | 平面表示装置の製造装置 |
| JP2005217209A (ja) | 2004-01-30 | 2005-08-11 | Hitachi Ltd | レーザアニール方法およびレーザアニール装置 |
| JP2006287183A (ja) | 2005-03-10 | 2006-10-19 | Ishikawajima Harima Heavy Ind Co Ltd | レーザアニール装置のレーザ照射装置 |
| JP2007110064A (ja) | 2005-09-14 | 2007-04-26 | Ishikawajima Harima Heavy Ind Co Ltd | レーザアニール方法及び装置 |
| JP2007214527A (ja) | 2006-01-13 | 2007-08-23 | Ihi Corp | レーザアニール方法およびレーザアニール装置 |
| KR100828367B1 (ko) * | 2006-08-28 | 2008-05-08 | 삼성전자주식회사 | 레이저 디스플레이장치 |
-
2008
- 2008-01-24 JP JP2008013766A patent/JP5376707B2/ja not_active Expired - Fee Related
-
2009
- 2009-01-19 US US12/355,871 patent/US8106341B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009176934A (ja) | 2009-08-06 |
| US20090218475A1 (en) | 2009-09-03 |
| US8106341B2 (en) | 2012-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5376707B2 (ja) | レーザアニール装置 | |
| WO2009150733A1 (ja) | レーザアニール方法及びレーザアニール装置 | |
| KR100711155B1 (ko) | 평면 표시 장치의 제조 장치 | |
| JP5248602B2 (ja) | 走査窓内で横に分散されたレーザパルスを用いて半導体構造を加工するためのシステム及び方法 | |
| JP6353683B2 (ja) | レーザ加工装置及びレーザ加工方法 | |
| JP5254761B2 (ja) | レーザ加工装置 | |
| KR101242094B1 (ko) | 레이저 어닐링 방법 및 장치 | |
| US7991037B2 (en) | Multi-beam laser apparatus | |
| US7333255B2 (en) | Laser processing device | |
| TW201134593A (en) | Link processing with high speed beam deflection | |
| KR20130138686A (ko) | 극단의 체류시간을 갖는 레이저 어닐링 시스템 및 방법 | |
| JPWO2008053915A1 (ja) | スキャナ光学システム、レーザ加工装置、及び、スキャナ光学装置 | |
| US20190193197A1 (en) | Laser machining apparatus and laser machining method | |
| JP5120685B2 (ja) | レーザアニール方法及びレーザアニール装置 | |
| KR100755817B1 (ko) | 액정 표시 장치의 결함 화소를 보정하는 방법 및 장치 | |
| KR20130077415A (ko) | 레이저 어닐링 장치 및 레이저 어닐링 방법 | |
| JP7308439B2 (ja) | レーザ加工装置および光学調整方法 | |
| JP2003347236A (ja) | レーザ照射装置 | |
| JP7262081B2 (ja) | レーザ加工装置および光学調整方法 | |
| KR20130048005A (ko) | 2빔 가공이 가능한 레이저 가공 장치 및 방법 | |
| KR20200028601A (ko) | 레이저 시스템 및 레이저 경로 유지방법 | |
| JP5021277B2 (ja) | レーザ加工装置 | |
| JP2011044502A (ja) | 光照射装置及びアニール装置 | |
| KR20170039815A (ko) | 레이저 결정화 장치 | |
| US12040186B2 (en) | Laser irradiation apparatus and laser irradiation method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130923 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5376707 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |