JP5300431B2 - 被検査基板のアライメント装置 - Google Patents
被検査基板のアライメント装置 Download PDFInfo
- Publication number
- JP5300431B2 JP5300431B2 JP2008293669A JP2008293669A JP5300431B2 JP 5300431 B2 JP5300431 B2 JP 5300431B2 JP 2008293669 A JP2008293669 A JP 2008293669A JP 2008293669 A JP2008293669 A JP 2008293669A JP 5300431 B2 JP5300431 B2 JP 5300431B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- substrate
- inspected
- stage
- alignment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 title claims abstract description 145
- 238000007689 inspection Methods 0.000 claims abstract description 50
- 239000000523 sample Substances 0.000 claims description 24
- 238000010586 diagram Methods 0.000 description 8
- 238000000034 method Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2855—Environmental, reliability or burn-in testing
- G01R31/286—External aspects, e.g. related to chambers, contacting devices or handlers
- G01R31/2865—Holding devices, e.g. chucks; Handlers or transport devices
- G01R31/2867—Handlers or transport devices, e.g. loaders, carriers, trays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2886—Features relating to contacting the IC under test, e.g. probe heads; chucks
- G01R31/2887—Features relating to contacting the IC under test, e.g. probe heads; chucks involving moving the probe head or the IC under test; docking stations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2893—Handling, conveying or loading, e.g. belts, boats, vacuum fingers
-
- G—PHYSICS
- G02—OPTICS
- G02F—OPTICAL DEVICES OR ARRANGEMENTS FOR THE CONTROL OF LIGHT BY MODIFICATION OF THE OPTICAL PROPERTIES OF THE MEDIA OF THE ELEMENTS INVOLVED THEREIN; NON-LINEAR OPTICS; FREQUENCY-CHANGING OF LIGHT; OPTICAL LOGIC ELEMENTS; OPTICAL ANALOGUE/DIGITAL CONVERTERS
- G02F1/00—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics
- G02F1/01—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour
- G02F1/13—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour based on liquid crystals, e.g. single liquid crystal display cells
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- General Engineering & Computer Science (AREA)
- Nonlinear Science (AREA)
- Manufacturing & Machinery (AREA)
- Environmental & Geological Engineering (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Crystallography & Structural Chemistry (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Optics & Photonics (AREA)
- Tests Of Electronic Circuits (AREA)
- Testing Of Short-Circuits, Discontinuities, Leakage, Or Incorrect Line Connections (AREA)
- Automatic Assembly (AREA)
- Testing Electric Properties And Detecting Electric Faults (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
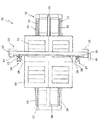
アライメント機構11は図1,3,4に示すように主に、Xθ軸ワークステージ12と、YZ軸コンタクトステージ13とから構成されている。
次に、本発明の第2実施形態について図15を基に説明する。
前記第1実施形態では、当該Y軸直動機構によってY軸方向に移動可能に支持されるZ軸ステージ部を、第1Z軸ステージ部27と第2Z軸ステージ部28との2つ設けたが、3つ以上設けても良い。被検査基板Pが大型になると、その縁部も正確な寸法に維持されるとは限らないため、複数箇所で被検査基板Pの縁部を検出して、座標上でその各位置を確認する。このとき、互いにずれている場合は、それが誤差の範囲ないか否かを判断する。そして、誤差の範囲内であれば無視し、誤差の範囲を超えていれば、各点の平均値に基づいて座標を特定する。
Claims (3)
- X軸方向に延ばして構成され被検査基板をX軸方向へ移動可能に且つθ軸方向に回転可能に支持するXθ軸ワークステージと、
当該Xθ軸ワークステージと別部材として構成されてこのXθ軸ワークステージの上方にY軸方向に掛け渡して設けられX軸プリアライメントセンサ及びY軸プリアライメントセンサをY軸方向及びZ軸方向へ移動可能に支持するYZ軸コンタクトステージと、
前記Xθ軸ワークステージ及びYZ軸コンタクトステージを制御する制御部とを備え、
前記Xθ軸ワークステージが、X軸方向に延びる骨組みである架台と、前記被検査基板を支持するワークテーブルと、当該ワークテーブルの下側面に設けられてワークテーブルを回転させるθ軸回転機構と、前記架台に支持されて前記θ軸回転機構を支持し当該θ軸回転機構を介して前記ワークテーブルをX軸方向に移動させるX軸直動機構とを備え、
前記YZ軸コンタクトステージが、前記Xθ軸ワークステージの上方にY軸方向に掛け渡して設けられた支持アーム部と、当該支持アーム部に取り付けられて前記Xθ軸ワークステージの上方に位置するY軸直動機構と、当該Y軸直動機構によってY軸方向に移動可能に支持された複数のコンタクトステージ板と、当該複数のコンタクトステージ板のうちの一方の端部側のコンタクトステージ板に設けられて前記被検査基板のX軸方向の位置を検出する第1のX軸プリアライメントセンサと、他方の端部側のコンタクトステージ板に設けられて前記被検査基板のX軸方向の位置を検出する第2のX軸プリアライメントセンサ及びY軸方向の位置を検出するY軸プリアライメントセンサと、前記各コンタクトステージ板に設けられ前記被検査基板上の電極と接触する探針を有するプローブブロックをZ軸方向に移動可能に支持するZ軸直動機構とを備え、
前記制御部が、前記YZ軸コンタクトステージ側の前記Y軸プリアライメントセンサ及び少なくとも2つの前記X軸プリアライメントセンサで検出した前記被検査基板の位置情報を基に、前記Xθ軸ワークステージの前記θ軸回転機構及びX軸直動機構を制御して前記ワークテーブルをX軸方向に移動させると共に適宜回転させて当該被検査基板のプリアライメントを行う機能を備えたことを特徴とする被検査基板のアライメント機構。 - 請求項1に記載の被検査基板のアライメント機構において、
複数のコンタクトステージ板のうちの両方の端部側のコンタクトステージ板にのみ前記X軸プリアライメントセンサ又は前記X軸プリアライメントセンサ及びY軸プリアライメントセンサを備えると共に、前記両方の端部側のコンタクトステージ板の各Z軸直動機構に、被検査基板の位置決め用マークを検索するために広い視野で被検査基板を撮影する検索用カメラと、被検査基板の正確な位置決めをするために狭い視野で被検査基板を撮影するアライメントカメラとをそれぞれ備え、
前記複数のコンタクトステージ板のうちの中間のコンタクトステージ板には前記プローブブロックのみを備えたことを特徴とする被検査基板のアライメント機構。 - 請求項1または2に記載の被検査基板のアライメント機構において、
前記Y軸プリアライメントセンサ及びX軸プリアライメントセンサが、検査光を発する発光素子と、当該発光素子から発せられて前記被検査基板の表面で反射した検査光を受光する受光素子とを備え、
前記被検査基板の表面に垂直な方向から見た、前記発光素子から前記受光素子への前記検査光の経路が前記被検査基板の縁部に平行になるように、前記発光素子と受光素子を配設したことを特徴とする被検査基板のアライメント機構。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008293669A JP5300431B2 (ja) | 2008-11-17 | 2008-11-17 | 被検査基板のアライメント装置 |
| KR1020090090814A KR101013110B1 (ko) | 2008-11-17 | 2009-09-25 | 피검사기판의 얼라인먼트 장치 |
| TW098133718A TWI396246B (zh) | 2008-11-17 | 2009-10-05 | 被檢查基板的對準裝置 |
| CN2009102094036A CN101739923B (zh) | 2008-11-17 | 2009-10-27 | 被检查基板的对准装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008293669A JP5300431B2 (ja) | 2008-11-17 | 2008-11-17 | 被検査基板のアライメント装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010121969A JP2010121969A (ja) | 2010-06-03 |
| JP2010121969A5 JP2010121969A5 (ja) | 2011-08-11 |
| JP5300431B2 true JP5300431B2 (ja) | 2013-09-25 |
Family
ID=42279817
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008293669A Active JP5300431B2 (ja) | 2008-11-17 | 2008-11-17 | 被検査基板のアライメント装置 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP5300431B2 (ja) |
| KR (1) | KR101013110B1 (ja) |
| CN (1) | CN101739923B (ja) |
| TW (1) | TWI396246B (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI416144B (zh) * | 2011-05-06 | 2013-11-21 | Fu Lai Yao | The method and device for detecting the touch point of the substrate line with the probe |
| KR101155961B1 (ko) * | 2011-11-17 | 2012-06-18 | 에스엔티코리아 주식회사 | 컨베이어가 1축을 대체한 2축 구동 검사장치 |
| JP6184301B2 (ja) * | 2013-11-14 | 2017-08-23 | 株式会社日本マイクロニクス | 検査装置 |
| KR101616564B1 (ko) * | 2014-09-24 | 2016-04-29 | 주식회사 디이엔티 | 프로브 이동장치 |
| CN104459439B (zh) * | 2014-12-08 | 2019-02-19 | 昆山精讯电子技术有限公司 | 触摸屏的自动检测设备 |
| CN106370656B (zh) * | 2015-07-23 | 2019-03-05 | 旭东机械工业股份有限公司 | 自动化显微取像设备及取像方法 |
| TWI817781B (zh) * | 2015-12-28 | 2023-10-01 | 美商色拉頓系統公司 | 系統與觀察及測試受測試器件(DUTs)陣列之複數個探針模組之定位方法 |
| US10324112B2 (en) * | 2016-08-11 | 2019-06-18 | Intel Corporation | Package testing system and method with contact alignment |
| CN106249449B (zh) * | 2016-08-29 | 2019-07-23 | 武汉华星光电技术有限公司 | 防夹碎基板对位装置 |
| CN108242410B (zh) * | 2018-01-04 | 2020-05-19 | 苏州德睿联自动化科技有限公司 | 电池串检测校正装置及方法 |
| KR102457415B1 (ko) * | 2018-02-26 | 2022-10-24 | 야마하 파인 테크 가부시키가이샤 | 위치 결정 장치 및 위치 결정 방법 |
| JP6956030B2 (ja) * | 2018-02-28 | 2021-10-27 | 東京エレクトロン株式会社 | 検査システム |
| US11468590B2 (en) * | 2018-04-24 | 2022-10-11 | Cyberoptics Corporation | Wireless substrate-like teaching sensor for semiconductor processing |
| IT201800010440A1 (it) * | 2018-11-20 | 2020-05-20 | Nuova Sima Spa | Dispositivo di raddrizzamento per raddrizzare un articolo lastriforme rispetto ad una direzione di movimentazione |
| CN110320686B (zh) * | 2019-07-15 | 2023-07-25 | 中导光电设备股份有限公司 | Uled屏幕基板检测/测量设备的预对位装置及其使用方法 |
| CN111999919B (zh) * | 2020-08-31 | 2023-05-05 | 晟光科技股份有限公司 | 一种lcd显示屏定位检测机构 |
| CN112720384B (zh) * | 2020-12-21 | 2022-08-26 | 苏州科韵激光科技有限公司 | 显示面板对准装置和显示面板对准方法 |
| KR102591202B1 (ko) * | 2021-03-26 | 2023-10-19 | (주)지엠더블유 | 자동 위치설정 기능을 구비한 무선기기 검사장치 |
| CN114536480B (zh) * | 2022-03-02 | 2023-05-23 | 重庆天荣日盛家居科技有限公司 | 多工位木质家居板材切割设备 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0817194B2 (ja) * | 1987-09-29 | 1996-02-21 | 東京エレクトロン株式会社 | 液晶表示体プローブ装置及び液晶表示体の位置合わせ方法 |
| KR100222614B1 (ko) * | 1997-08-20 | 1999-10-01 | 윤종용 | 액정 표시판의 위치 결정 장치 |
| JPH11304884A (ja) * | 1998-04-24 | 1999-11-05 | Micronics Japan Co Ltd | 大型回路板用プローバ |
| JP2001050858A (ja) * | 1999-08-04 | 2001-02-23 | Micronics Japan Co Ltd | 表示用パネル基板の検査装置 |
| US20020042664A1 (en) * | 2000-05-31 | 2002-04-11 | Nikon Corporation | Evaluation method, position detection method, exposure method and device manufacturing method, and exposure apparatus |
| KR100488535B1 (ko) * | 2002-07-20 | 2005-05-11 | 엘지.필립스 엘시디 주식회사 | 액정토출장치 및 토출방법 |
| KR100960472B1 (ko) * | 2003-12-16 | 2010-05-28 | 엘지디스플레이 주식회사 | 액정 표시패널의 제조장치 및 그 제조방법 |
| US8982320B2 (en) * | 2004-08-19 | 2015-03-17 | Nikon Corporation | Alignment information display method and its program, alignment method, exposure method, device production process, display system, display device, and program and measurement/inspection system |
| JP4395429B2 (ja) * | 2004-10-20 | 2010-01-06 | 日本発條株式会社 | コンタクトユニットおよびコンタクトユニットを用いた検査システム |
| JP2006245174A (ja) * | 2005-03-02 | 2006-09-14 | Dainippon Printing Co Ltd | 位置決めステージ、パターン形成装置、検査装置、位置補正方法、基板支持部 |
| JP2006240015A (ja) * | 2005-03-02 | 2006-09-14 | Dainippon Printing Co Ltd | パターン形成装置、アライメント装置、基板処理装置、パターン形成方法、基板処理方法 |
| JP5061904B2 (ja) * | 2005-10-28 | 2012-10-31 | 株式会社ニコン | デバイス製造処理装置間の接続装置及び接続方法、プログラム、デバイス製造処理システム、露光装置及び露光方法、並びに測定検査装置及び測定検査方法 |
| JP4808135B2 (ja) | 2006-11-09 | 2011-11-02 | 株式会社日本マイクロニクス | プローブ位置合わせ方法及び可動式プローブユニット機構並びに検査装置 |
-
2008
- 2008-11-17 JP JP2008293669A patent/JP5300431B2/ja active Active
-
2009
- 2009-09-25 KR KR1020090090814A patent/KR101013110B1/ko active IP Right Grant
- 2009-10-05 TW TW098133718A patent/TWI396246B/zh active
- 2009-10-27 CN CN2009102094036A patent/CN101739923B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101739923B (zh) | 2012-10-03 |
| KR101013110B1 (ko) | 2011-02-14 |
| CN101739923A (zh) | 2010-06-16 |
| KR20100055321A (ko) | 2010-05-26 |
| JP2010121969A (ja) | 2010-06-03 |
| TW201025477A (en) | 2010-07-01 |
| TWI396246B (zh) | 2013-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5300431B2 (ja) | 被検査基板のアライメント装置 | |
| TWI645267B (zh) | Optical measuring device and method | |
| JP4745727B2 (ja) | ペースト塗布装置 | |
| KR101344675B1 (ko) | 기판 가공 방법 | |
| JP2013016570A (ja) | レーザー高さ測定装置および部品実装機 | |
| TWI595594B (zh) | Substrate holding device, coating device, substrate holding method | |
| KR20190029697A (ko) | 본딩 정렬을 위한 디바이스 및 방법 | |
| JP2016205957A (ja) | X−y基板検査装置の可動ヘッド位置補正方法およびx−y基板検査装置 | |
| JP2011066041A (ja) | 電子部品実装装置 | |
| JP2010072615A (ja) | スキャン露光装置およびスキャン露光装置の基板搬送方法 | |
| KR20140137873A (ko) | 글라스와 마스크의 정렬장치 | |
| JP2009016673A5 (ja) | ||
| JP2009016673A (ja) | 部品の吸着位置補正方法および部品移載装置 | |
| JP3783260B2 (ja) | 多層プリント配線板のスルーホール穴明け機 | |
| JP2009010167A (ja) | 部品移載装置 | |
| JP2011071225A (ja) | アライメント装置 | |
| JP7524127B2 (ja) | 部品実装装置 | |
| JP2007040831A (ja) | 回路基板保持装置 | |
| KR20130017894A (ko) | 노광 장치 및 그 방법 | |
| JP4631497B2 (ja) | 近接露光装置 | |
| JP2006100590A (ja) | 近接露光装置 | |
| JP2005216974A (ja) | 電子部品実装装置における移動台の移動制御方法およびその方法に用いられるマトリックス基板 | |
| JP4487688B2 (ja) | ステップ式近接露光装置 | |
| KR102258116B1 (ko) | 패널검사장치 | |
| JP2595995B2 (ja) | 組立装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110627 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130321 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130618 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5300431 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |