JP5217213B2 - 撮像装置及びプログラム - Google Patents
撮像装置及びプログラム Download PDFInfo
- Publication number
- JP5217213B2 JP5217213B2 JP2007092825A JP2007092825A JP5217213B2 JP 5217213 B2 JP5217213 B2 JP 5217213B2 JP 2007092825 A JP2007092825 A JP 2007092825A JP 2007092825 A JP2007092825 A JP 2007092825A JP 5217213 B2 JP5217213 B2 JP 5217213B2
- Authority
- JP
- Japan
- Prior art keywords
- blur
- imaging
- image
- area
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Studio Devices (AREA)
Description
この手ぶれ検出センサによって検出された角速度などに基づき、撮像装置のぶれ量を求め、そのぶれ量から撮像素子などの光学系の移動量を算出して、算出された移動量に応じて光学系を移動させて、撮像装置のぶれを光学系の移動で相殺するようにして、手ぶれ補正が行われるようになっている。
被写体を撮像する撮像素子と、
前記撮像素子に、撮像画像に係る撮像データを取得する撮像領域と、画像ぶれに関するぶれ検出データを取得するぶれ検出領域と、を設定する領域設定手段と、
前記領域設定手段により設定された前記撮像領域から前記撮像データを所定の第1の周期毎に読み出す第一読出制御手段と、
前記領域設定手段で設定した前記ぶれ検出領域から前記ぶれ検出データを前記第1の周期より短い所定の第2の周期毎に読み出す第二読出制御手段と、
前記第二読出制御手段により前記ぶれ検出領域から前記所定の第2の周期毎に読み出された前記ぶれ検出データに基づき、画像ぶれ量を逐次検出するぶれ量検出手段と、
前記ぶれ量検出手段により検出された画像ぶれ量が所定の基準値以上又は所定の基準値未満かを逐次判定する判定手段と、
前記判定手段による判定結果に基づいて、前記領域設定手段により設定された前記ぶれ検出領域の大きさを逐次変更する領域変更手段と、
を備えることを特徴とする。
前記領域変更手段は、前記ぶれ量検出手段により検出された画像ぶれ量が所定の基準値以上の場合に、前記ぶれ検出領域の大きさを大きくする大ぶれ検出領域拡大手段を更に備えることを特徴とする。
前記領域変更手段は、前記ぶれ量検出手段により検出された画像ぶれ量が所定の基準値未満の場合に、前記ぶれ検出領域の大きさを大きくする小ぶれ検出領域拡大手段を更に備えることを特徴とする。
前記領領域設定手段は、前記ぶれ検出領域を前記撮像領域の外周側を囲うように設定し、
前記領域変更手段は、前記撮像領域の外周側を囲うように設定されたぶれ検出領域の大きさを変更することを特徴とする。
前記ぶれ量検出手段により検出された前記画像ぶれ量に応じた補正処理を行うぶれ補正手段と、
前記ぶれ補正手段により画像ぶれが補正された前記撮像データに基づく画像情報を前記第一読出制御手段により読み出して取得する画像情報取得手段と、を更に備えることを特徴とする。
前記ぶれ量検出手段により検出された前記画像ぶれ量に応じた補正処理を行うぶれ補正手段と、
前記第一読出制御手段により読み出した前記撮像データに基づく画像情報を取得して、前記ぶれ補正手段により画像ぶれを補正した画像情報を取得する画像情報取得手段と、を更に備えることを特徴とする。
被写体を撮像する撮像素子を備えるコンピュータを、
前記撮像素子に、撮像画像に係る撮像データを取得する撮像領域と、画像ぶれに関するぶれ検出データを取得するぶれ検出領域と、を設定する領域設定手段、
前記領域設定手段で設定した前記撮像領域から前記撮像データを所定の第1の周期毎に読み出す第一読出制御手段、
前記領域設定手段で設定した前記ぶれ検出領域から前記ぶれ検出データを前記第1の周期より短い所定の第2の周期毎に読み出す第二読出制御手段、
前記第二読出制御手段により前記ぶれ検出領域から前記所定の第2の周期毎に読み出された前記ぶれ検出データに基づき、画像ぶれ量を逐次検出するぶれ量検出手段、
前記ぶれ量検出手段により検出された画像ぶれ量が所定の基準値以上又は所定の基準値未満かを逐次判定する判定手段、
前記判定手段による判定結果に基づいて、前記領域設定手段により設定された前記ぶれ検出領域の大きさを逐次変更する領域変更手段、
として機能させることを特徴とする。
図1は、本発明を適用した実施形態1の撮像装置100の概略構成を示すブロック図である。
実施形態1の撮像装置100は、撮像部1のCCD12aのぶれ検出領域A2(図3参照)から得られる画像データに基づいて撮像画像のぶれ量を検出し、検出されたぶれ量に応じてCCD12aの主撮像領域A1(図3参照)から得られる画像データにぶれ補正処理を施し、被写体の撮像画像のぶれを補正するものである。
具体的には、撮像装置100は、図1に示すように、撮像部1と、撮像補助部2と、表示部3と、操作部4と、記録媒体5と、USB端子6と、制御部7等を備えて構成されている。
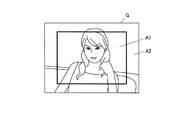
CCD12aは、撮像レンズ群11を通過した光を光量に応じて光電変換して蓄積する複数の光電変換部が二次元マトリックス状に配列されたものである。また、CCD12aは、被写体を撮像した際に、主撮像画像に係る主撮像データを保持する略矩形状の主撮像領域A1(図3参照)と、主撮像領域A1の外側(主撮像領域A1と異なる領域)に隣接して設けられ、画像ぶれに関するぶれ検出データを保持する略「ロ」字状のぶれ検出領域A2(図3参照)とを具備している。
そして、CCD12aは、例えば、CPU71の制御下にて、複数の光電変換部に蓄積された電荷が順次所定方向(例えば、垂直方向)に転送されて読み出される、いわゆる破壊読み出し可能に構成されている。
画像メモリ14は、画像処理後の画像信号を一時的に記憶する。
撮像素子駆動部15は、撮像素子であるCCD12aを所定方向(例えば、垂直方向および水平方向)に移動させるアクチュエータと、そのアクチュエータを駆動させるアクチュエータドライバ等から構成されている。
撮像制御部16は、CPU71の制御下にて、電子撮像部12、映像信号処理部13、撮像素子駆動部15を制御する。
フォーカス駆動部21は、撮像レンズ群11に接続されたフォーカス機構部(図示略)を駆動させる。
ズーム駆動部22は、撮像レンズ群11に接続されたズーム機構部(図示略)を駆動させる。
なお、フォーカス駆動部21及びズーム駆動部22は、撮像制御部16に接続され、撮像制御部16の制御下にて駆動する。
表示制御部31は、CPU71から適宜出力される表示データを一時的に保存するビデオメモリ(図示略)を備えている。
画像表示部32は、表示制御部31からの出力信号に基づいて所定の画像を表示する液晶モニタ等を備えている。
操作入力部41におけるシャッターボタン41aは、撮像部1による被写体の撮像を指示する。このシャッターボタン41aは、半押し操作と全押し操作の2段階の押圧操作が可能に構成されている。
入力回路42は、この操作入力部41から入力された操作信号をCPU71に入力するためのものである。
具体的には、図2に示すような被写体画像を撮像する際に、CCD12aの撮像領域が、例えば、図3に示すように、撮像画像Gに対する中央側に位置する主撮像領域A1と、主撮像領域A1の外周側を囲うぶれ検出領域A2とからなるように設定されている場合、CPU71は、CCD12aにおける主撮像領域A1に保持された主撮像データを所定の第1フレームレートで読み出して取得、又は所定の露光時間で露光して読み出すことにより取得する。
具体的には、図2に示すような被写体画像を撮像する際に、CPU71は、CCD12aにおけるぶれ検出領域A2に保持されたぶれ検出データを第2フレームレートで読み出して取得、又は主画像データの露光時間中にぶれ検出データを所定のフレームレートで読み出して取得する。
ここで、ぶれ検出領域A2は、例えば、図3に示すように、主撮像領域A1と重ならない配置に設定されているため、ぶれ検出領域A2に対応する画像情報が破壊読み出しされても、主撮像領域A1に対応する画像情報が損なわれることがないので、主撮像領域A1から被写体の撮像データを良好に読み出して、取得することが可能である。
そして、図4に示すように、シャッター前のスルー画像表示時においては、ぶれ検出領域A2に対しては、主撮像領域A1に比べて短時間の露光による比較的速いフレームレートにより撮像画像データを読み出して、その画像に関する画素の取り込みが行われる。
またシャッター後の静止画撮影時においても、ぶれ検出領域A2は、主撮像領域A1の撮像露光時間中に、1回の露光時間が主画像領域A1よりも短時間で且つ1回より多くの回数撮影画像データを読み出して、その画像に関する画素の取り込みが行われる。
なお、ぶれ検出領域A2からの画像ぶれに関するぶれ検出データの読み出しに当たって、ゲイン調整され感度が高められていることが好ましい。
このCPU71は、例えば、撮像画像Gにおけるぶれ検出領域A2から第2フレームレートで読み出された画像ぶれに関するぶれ検出データであって、第2フレームレートで連続的に読み出された複数の撮像画像データに基づき、ぶれ検出領域A2における特定画素の移動量を検出するようにして撮像画像Gの画像ぶれ量を検出する。
このCPU71は、例えば、検出された画像ぶれ量に基づき電子撮像部12におけるCCD12aの移動量を算出し、当該移動量に応じて撮像素子駆動部15によりCCD12aを移動させて、撮像装置100のぶれや被写体のぶれを相殺するようにして撮像画像Gのぶれ補正を実行する。
このCPU71は、例えば、補正処理が実行されて、撮像部1によって撮像された撮像画像Gにおける主撮像領域A1から第1フレームレートで読み出された主撮像データである被写体の撮像画像データを取得して記録媒体5に記憶させる。つまり、CPU71は、撮像画像Gにおける主撮像領域A1部分に対応する画像を記録画像として取得する。
そして、CPU71は、プログラムメモリ72から第二読出制御プログラム72bを読み出して実行し、CCD12aの撮像領域におけるぶれ検出領域A2(図3参照)から画像ぶれに関するぶれ検出データを読み出して取得する。さらに、CPU71は、プログラムメモリ72からぶれ量検出プログラム72cを読み出して実行し、ぶれ検出領域A2から第2フレームレートで読み出された画像ぶれに関するぶれ検出データに基づき、撮像画像Gの画像ぶれ量の検出処理を開始する(ステップS1)。
CPU71が、ぶれ検出領域A2の変更処理の実行が指示されていないと判定すると(ステップS2;No)、ステップS4へ進む。
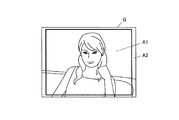
一方、CPU71が、ぶれ検出領域A2の変更処理の実行が指示されていると判定すると(ステップS2;Yes)、CPU71は、プログラムメモリ72から領域変更プログラム72fを読み出して実行し、画像ぶれ量に応じたぶれ検出領域A2の変更を行う(ステップS3)。例えば、検出された画像ぶれ量が所定の基準より大きい場合、撮像画像Gの画像ぶれ量を適正に検出することができるように、図6に示すように、ぶれ検出領域A2を大きくする変更を行う。また、検出された画像ぶれ量が所定の基準より小さい場合、図6に示すように、撮像画像Gの画像ぶれ量を精度よく検出することができるように、ぶれ検出領域A2を大きくする変更を行ってもよい。また、ぶれ検出領域の大きさ変更は、手動で行ってもよい。
なお、ぶれ検出領域A2が小さいほど画像ぶれ量の検出処理を短時間で行うことができるので、図7に示すように、検出された画像振れ量が所定の基準より小さい場合、撮像画像Gの画像振れ量を適正に検出することが可能な程度に、振れ検出エリアA2を小さくする変更を行ってもよい。
CPU71が、ハーフシャッタとなっていないと判断すると(ステップS4;No)、ステップS2に戻る。
一方、CPU71が、ハーフシャッタとなったと判断すると(ステップS4;Yes)、CPU71は、プログラムメモリ72からぶれ補正プログラム72dを読み出して実行し、検出された画像ぶれ量に基づき算出した移動量に応じてCCD12aを移動させるぶれ補正処理を開始する(ステップS5)。
CPU71が、シャッターボタン41aが全押しされたと判断すると(ステップS6;Yes)、ステップS8へ進む。
一方、CPU71が、シャッターボタン41aは全押しされていないと判断すると(ステップS6;No)、CPU71は、シャッターボタン41aが半押しされたハーフシャッタが解除されたか否かを判断する(ステップS7)。
CPU71が、ハーフシャッタは解除されていないと判断すると(ステップS7;No)、ステップS6に戻る。一方、CPU71が、ハーフシャッタは解除されたと判断すると(ステップS7;Yes)、ステップS2に戻る。
つまり、撮像装置100は、撮像部1により撮像される撮像画像Gの範囲に対応するCCD12aの撮像領域に予め設定されている主撮像領域A1とぶれ検出領域A2とからそれぞれ撮像画像の画像データを読み取り、ぶれ検出領域A2から得られるブレ検出データに基づき画像ぶれ量を取得し、取得した画像ぶれ量に応じた補正を主撮像領域A1から得られる主撮像データに対して施すようにして、画像ぶれのない好適な被写体の画像情報を取得する撮像を可能にする。
特に、撮像装置100において、撮像領域に対して互いに重ならない主撮像領域A1とぶれ検出領域A2を設定するとともに、被写体の撮像データを第1フレームレートで主撮像領域A1から読み出すことと、画像ぶれに関するぶれ検出データを第1フレームレートより速い第2フレームレートでぶれ検出領域A2から読み出すことを、撮像素子であるCCD12aによって可能にして、ジャイロを不要とするので、コスト低減とスペース有効活用(小型化)を可能にする撮像装置100とすることができる。
また、撮像装置100は、検出された画像ぶれ量に応じて、ぶれ検出領域A2の大きさを変更することができるので、画像ぶれ量が大きい場合や小さい場合など、それぞれのぶれ量に適した画像ぶれの補正処理を行うことが可能になる。
従って、この撮像装置100であれば、ジャイロなどのセンサを用いることなく、画像ぶれの補正を好適に行うことができる。
図8は、本発明を適用した実施形態2の撮像装置200の概略構成を示すブロック図である。
実施形態2の撮像装置200は、CMOS12bの撮像領域A3(図9参照)に含まれるぶれ検出領域A4(図9参照)から得られる画像データに基づいて撮像画像のぶれ量を検出し、検出されたぶれ量に応じて撮像領域A3から得られる画像データにぶれ補正処理を施し、被写体の撮像画像のぶれを補正するものである。
なお、実施形態2の撮像装置200は、撮像素子としてCMOS12bを用い、撮像領域A3にぶれ検出領域A4が含まれている以外の点では、実施形態1におけるものと略同様であるので、異なる部分について説明し、詳細な説明については省略するものとする。
CMOS12bは、撮像レンズ群11を通過した光を光量に応じて光電変換して蓄積する複数の光電変換部が二次元マトリックス状に配列されたものである。また、CMOS12bは、被写体を撮像した際に、撮像画像に係る撮像データを保持する撮像領域A3を備え、撮像領域A3の内側の所定位置に、画像ぶれに関するぶれ検出データを保持するぶれ検出領域A4を具備している。
そして、CMOS12bは、例えば、CPU71の制御下にて、複数の光電変換部における任意の光電変換部の電荷が読み出される、いわゆる非破壊読み出し可能に構成されている。つまり、CMOS12bの複数の光電変換部のうち、特定の光電変換部の電荷のみが読み出されても、当該光電変換部には電荷が保持されるようになっている。
なお、被写体を撮像する範囲に対応する撮像領域を主撮像領域とぶれ検出領域との異なる2つの領域に区分けしてもよい。
具体的には、図2に示すような被写体画像を撮像する際に、例えば、図9に示すように、CPU71は、CMOS12bにおける撮像領域A3に保持された撮像データを所定のフレームレートで読み出して取得する。
具体的には、図2に示すような被写体画像を撮像する際に、その撮像領域が、例えば、図9に示すように、CMOS12bの撮像画像Gに係る画像情報を保持する撮像領域A3の4隅にぶれ検出領域A4が設定されている場合、CPU71は、ぶれ検出領域A4に保持されたぶれ検出データを所定のぶれ検出用のフレームレートで読み出して取得する。
ここで、CMOS12bは、非破壊読み出し可能な撮像素子であるため、撮像領域A3に重なった配置のぶれ検出領域A4から画像ぶれに関するぶれ検出データを読み出す処理を行っても、撮像領域A3から被写体の撮像データを読み出す処理を妨げることはなく、撮像データを良好に読み出して取得することが可能である。
ここで撮像領域A3の4隅にぶれ検出領域A4が設定されていなくても構わず、例えば十字状にぶれ検出領域を並べるように設定してもよい。
なお、ぶれ検出領域の変更は、手振れ量に応じて自動で行ってもよいし、手動で行ってもよい。
つまり、このCPU71は、検出された画像ぶれ量が大きい場合に、図10に示すように、ぶれ検出領域A4を大きくする変更を行い、ぶれ検出領域A4における特定画素の移動量が大きい場合であっても、そのぶれ検出領域A4内で特定画素の移動を検出可能にするようにして、撮像画像の画像ぶれ量を適正に検出するようになっている。このように、ぶれ検出領域A4を大きくする変更によって、大きな画像ぶれを適正に補正するが可能になる。
つまり、このCPU71は、検出された画像ぶれ量が小さい場合に、図10に示すように、ぶれ検出領域A4を大きくする変更を行い、ぶれ検出領域A4における特定画素の移動量が小さい場合であっても、そのぶれ検出領域A4内での特定画素の微小な移動も検出可能とするようにして、撮像画像の画像ぶれ量を精度よく検出するようになっている。このように、ぶれ検出領域A4を大きくする変更によって、小さな画像ぶれでも正確に補正することが可能になる。
特に、撮像装置200は、非破壊読み出し可能な撮像素子であるCMOS12bを用いることにより、撮像領域A3に重なった配置のぶれ検出領域A4から画像ぶれに関するぶれ検出データを読み出す処理を行っても、撮像領域A3から被写体の撮像データを読み出す処理を妨げることはないので、好適な画像ぶれの検出が可能となるようにぶれ検出領域A4を任意に設定することができる。そして、好適な画像ぶれの検出に伴い好適な画像ぶれの補正がなされて、画像ぶれのない良好な被写体の画像情報を取得する撮像を行うことが可能になる。
従って、このような撮像装置200であっても、ジャイロなどのセンサを用いることなく、画像ぶれの補正を好適に行うことができ、ジャイロを不要とすることにより、コスト低減とスペース有効活用を可能にする撮像装置200とすることができる。
実施形態1及び2においては、取得した画像ぶれ量に応じて、CCD12aやCMOS12bを移動させる撮像素子シフトによるぶれ補正処理を例に挙げて説明したが、本発明はこれに限定されるものではなく、例えば、画像ぶれ量に基づき算出された移動量に応じて撮像レンズ群11を移動させるレンズシフトによるぶれ補正処理であってもよい。また、取得した画像ぶれ量に応じて、撮像した主撮像領域に関する複数の画像情報を重ね合わせるデジタル合成を行う電子式の画像補正処理であってもよい。
また、実施形態1及び2においては、図5にあるように、スルー画像表示や静止画撮影のために本発明の手振れ検出方法を用いたがこれに限らず、連写撮影や動画撮影に関するものであってもよい。例えば動画撮影においては、主撮像領域は30fpsで画素の読み込みを行い、ぶれ検出領域は60fpsで画素の読み込みを行うように構成してもよい。この場合、動画撮影前のスルー画像においては、主撮像領域は15fpsで画素の読み込みを行い、ぶれ検出領域は30fpsで画素の読み込みを行うように構成しておき、シャッターボタンを押下して撮影開始した場合に各フレームレートを変更する構成としてもよい。この時、主撮像領域のフレームレートと、ぶれ検出領域のフレームレートを別々に変更可能に構成してもよく、これにより所望の条件で撮影することができる。
12 電子撮像部
12a CCD(撮像素子)
12b CMOS(撮像素子)
3 表示部
32 画像表示部
5 記録媒体
7 制御部
71 CPU(第一読出制御手段、第二読出制御手段、ぶれ量検出手段、ぶれ補正手段、画像情報取得手段、領域変更手段、大ぶれ検出領域拡大手段、小ぶれ検出領域拡大手段)
100、200 撮像装置
A1 主撮像領域
A2 ぶれ検出領域
A3 撮像領域
A4 ぶれ検出領域
G 撮像画像
Claims (7)
- 被写体を撮像する撮像素子と、
前記撮像素子に、撮像画像に係る撮像データを取得する撮像領域と、画像ぶれに関するぶれ検出データを取得するぶれ検出領域と、を設定する領域設定手段と、
前記領域設定手段により設定された前記撮像領域から前記撮像データを所定の第1の周期毎に読み出す第一読出制御手段と、
前記領域設定手段で設定した前記ぶれ検出領域から前記ぶれ検出データを前記第1の周期より短い所定の第2の周期毎に読み出す第二読出制御手段と、
前記第二読出制御手段により前記ぶれ検出領域から前記所定の第2の周期毎に読み出された前記ぶれ検出データに基づき、画像ぶれ量を逐次検出するぶれ量検出手段と、
前記ぶれ量検出手段により検出された画像ぶれ量が所定の基準値以上又は所定の基準値未満かを逐次判定する判定手段と、
前記判定手段による判定結果に基づいて、前記領域設定手段により設定された前記ぶれ検出領域の大きさを逐次変更する領域変更手段と、
を備えることを特徴とする撮像装置。 - 前記領域変更手段は、前記ぶれ量検出手段により検出された画像ぶれ量が所定の基準値以上の場合に、前記ぶれ検出領域の大きさを大きくする大ぶれ検出領域拡大手段を更に備えることを特徴とする請求項1に記載の撮像装置。
- 前記領域変更手段は、前記ぶれ量検出手段により検出された画像ぶれ量が所定の基準値未満の場合に、前記ぶれ検出領域の大きさを大きくする小ぶれ検出領域拡大手段を更に備えることを特徴とする請求項1に記載の撮像装置。
- 前記領領域設定手段は、前記ぶれ検出領域を前記撮像領域の外周側を囲うように設定し、
前記領域変更手段は、前記撮像領域の外周側を囲うように設定されたぶれ検出領域の大きさを変更することを特徴とする請求項1〜3の何れか一項に記載の撮像装置。 - 前記ぶれ量検出手段により検出された前記画像ぶれ量に応じた補正処理を行うぶれ補正手段と、
前記ぶれ補正手段により画像ぶれが補正された前記撮像データに基づく画像情報を前記第一読出制御手段により読み出して取得する画像情報取得手段と、
を更に備えることを特徴とする請求項1〜4の何れか一項に記載の撮像装置。 - 前記ぶれ量検出手段により検出された前記画像ぶれ量に応じた補正処理を行うぶれ補正手段と、
前記第一読出制御手段により読み出した前記撮像データに基づく画像情報を取得して、前記ぶれ補正手段により画像ぶれを補正した画像情報を取得する画像情報取得手段と、
を更に備えることを特徴とする請求項1〜4の何れか一項に記載の撮像装置。 - 被写体を撮像する撮像素子を備えるコンピュータを、
前記撮像素子に、撮像画像に係る撮像データを取得する撮像領域と、画像ぶれに関するぶれ検出データを取得するぶれ検出領域と、を設定する領域設定手段、
前記領域設定手段で設定した前記撮像領域から前記撮像データを所定の第1の周期毎に読み出す第一読出制御手段、
前記領域設定手段で設定した前記ぶれ検出領域から前記ぶれ検出データを前記第1の周期より短い所定の第2の周期毎に読み出す第二読出制御手段、
前記第二読出制御手段により前記ぶれ検出領域から前記所定の第2の周期毎に読み出された前記ぶれ検出データに基づき、画像ぶれ量を逐次検出するぶれ量検出手段、
前記ぶれ量検出手段により検出された画像ぶれ量が所定の基準値以上又は所定の基準値未満かを逐次判定する判定手段、
前記判定手段による判定結果に基づいて、前記領域設定手段により設定された前記ぶれ検出領域の大きさを逐次変更する領域変更手段、
として機能させることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007092825A JP5217213B2 (ja) | 2007-03-30 | 2007-03-30 | 撮像装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007092825A JP5217213B2 (ja) | 2007-03-30 | 2007-03-30 | 撮像装置及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008252648A JP2008252648A (ja) | 2008-10-16 |
| JP2008252648A5 JP2008252648A5 (ja) | 2010-05-13 |
| JP5217213B2 true JP5217213B2 (ja) | 2013-06-19 |
Family
ID=39977047
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007092825A Expired - Fee Related JP5217213B2 (ja) | 2007-03-30 | 2007-03-30 | 撮像装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5217213B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5184325B2 (ja) * | 2008-12-11 | 2013-04-17 | 富士フイルム株式会社 | 撮影装置および撮影装置の制御方法並びにプログラム |
| JP5482154B2 (ja) | 2009-12-02 | 2014-04-23 | セイコーエプソン株式会社 | 撮像装置、撮像方法および撮像プログラム |
| JP5790808B2 (ja) * | 2014-02-18 | 2015-10-07 | セイコーエプソン株式会社 | 撮像装置 |
| CN107211092B (zh) * | 2014-12-15 | 2020-07-21 | Gvbb控股有限责任公司 | 用于生成图像的相机、相机系统以及方法 |
| US10142568B2 (en) | 2017-02-13 | 2018-11-27 | Semiconductor Components Industries, Llc | Methods and apparatus for vignette and out-of-focus correction |
| WO2023218980A1 (ja) * | 2022-05-13 | 2023-11-16 | ソニーセミコンダクタソリューションズ株式会社 | 撮像装置、センサチップ、および処理回路 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2862241B2 (ja) * | 1988-04-15 | 1999-03-03 | キヤノン株式会社 | 画像ぶれ検出装置 |
| JP2902966B2 (ja) * | 1994-12-16 | 1999-06-07 | 三洋電機株式会社 | 手振れ補正装置およびそれを用いたビデオカメラ |
| JP3627027B2 (ja) * | 1996-10-17 | 2005-03-09 | コニカミノルタフォトイメージング株式会社 | 画像検出システム |
| JP3733828B2 (ja) * | 2000-03-29 | 2006-01-11 | コニカミノルタフォトイメージング株式会社 | 電子カメラ |
| JP2002027300A (ja) * | 2000-07-05 | 2002-01-25 | Minolta Co Ltd | デジタルカメラ |
| JP2004289709A (ja) * | 2003-03-25 | 2004-10-14 | Toshiba Corp | 撮像装置、撮像方法 |
| JP2004336452A (ja) * | 2003-05-08 | 2004-11-25 | Canon Inc | 撮像装置 |
| JP4533089B2 (ja) * | 2004-11-01 | 2010-08-25 | 富士通セミコンダクター株式会社 | 動画データ生成装置 |
-
2007
- 2007-03-30 JP JP2007092825A patent/JP5217213B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008252648A (ja) | 2008-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4818987B2 (ja) | 撮像装置、表示方法、及びプログラム | |
| KR101237540B1 (ko) | 화상의 확대 표시 기능을 구비한 카메라 | |
| US8736741B2 (en) | Imaging device with contrast AF, and control method for imaging device with contrast AF | |
| JP2009284394A (ja) | 撮像装置および撮像方法 | |
| JP5217213B2 (ja) | 撮像装置及びプログラム | |
| JP2006287920A (ja) | ビデオカメラおよびそれに用いる画像抽出装置 | |
| US10298862B2 (en) | Imaging apparatus and imaging method | |
| TWI492618B (zh) | 攝影裝置及電腦可讀取記錄媒體 | |
| JP2009065573A (ja) | 撮像装置、フォーカス制御方法、フォーカス制御プログラム | |
| JP2009251491A (ja) | 撮像装置および撮像装置の制御方法 | |
| JP2009251493A (ja) | 撮像装置および撮像装置の制御方法 | |
| JP6296914B2 (ja) | 撮像装置、撮像装置の制御方法、及びプログラム | |
| JP2014026062A (ja) | 撮像装置および撮像方法 | |
| JP6377286B2 (ja) | 撮影装置及びその制御方法、並びに作動プログラム | |
| JP5197454B2 (ja) | デジタルカメラ | |
| JP2006245815A (ja) | 撮像装置 | |
| JP2006148550A (ja) | 画像処理装置及び撮像装置 | |
| JP5478677B2 (ja) | 撮像装置および撮像装置の制御方法 | |
| JP5621265B2 (ja) | 手ぶれ補正装置、撮像処理方法及びプログラム | |
| JP2009284117A (ja) | 撮像装置および撮像装置の制御方法 | |
| JP4985716B2 (ja) | 撮像装置、合焦評価領域の設定方法、及び、プログラム | |
| JP2010226185A (ja) | 撮像装置および撮像装置の制御方法 | |
| JP2010171769A (ja) | 電子カメラ | |
| JP4687619B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP5792273B2 (ja) | カメラシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100325 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100325 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110802 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110926 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20110926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120515 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120710 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130218 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160315 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5217213 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |