JP5203209B2 - 無段変速装置 - Google Patents
無段変速装置 Download PDFInfo
- Publication number
- JP5203209B2 JP5203209B2 JP2008533121A JP2008533121A JP5203209B2 JP 5203209 B2 JP5203209 B2 JP 5203209B2 JP 2008533121 A JP2008533121 A JP 2008533121A JP 2008533121 A JP2008533121 A JP 2008533121A JP 5203209 B2 JP5203209 B2 JP 5203209B2
- Authority
- JP
- Japan
- Prior art keywords
- input shaft
- output
- ring
- roller
- transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H15/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members
- F16H15/48—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members with members having orbital motion
- F16H15/50—Gearings providing a continuous range of gear ratios
- F16H15/52—Gearings providing a continuous range of gear ratios in which a member of uniform effective diameter mounted on a shaft may co-operate with different parts of another member
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Friction Gearing (AREA)
Description
この無段変速装置では、入力軸3が回転すると、サンローラ5が一体的に回転し、サンローラ5に外接するテーパローラ7が回転及び公転し、テーパローラ7の回転により出力リング8が回転し、出力リング8と一体となって出力軸4が回転し、変速リング9の位置に応じて出力軸4の回転速度が増減されるようになっている。
また、上記法線荷重の増加に伴って入力軸3及び出力軸4の軸線方向にスラスト荷重が発生し、このスラスト荷重は入力軸3及び出力軸4の軸受2あるいはハウジング1が受けることになるため、軸受2及びハウジング1の経時的な変形あるいは軸受領域の発熱による潤滑油温度の上昇等を生じ、磨耗、動力伝達効率の低下等を招く虞がある。一方、変形等に対処するべく、ハウジング1の剛性を高めると、大型化あるいは重量化を招くことになる。
この構成によれば、入力軸の回転駆動力は、第1変速ユニット及び第2変速ユニットにより無段変速され、出力回転体を介して、出力軸から回転駆動力として出力される。
このように、入力軸のトルクを、二つの変速ユニット(第1変速ユニット及び第2変速ユニット)により倍増しつつ無段変速でき、又、二つの変速ユニット(第1変速ユニット及び第2変速ユニット)は、入力軸の軸線方向に垂直な面に対して対称的に向かい合うように配置されているため、二つの変速ユニットにおいてそれぞれ発生する入力軸の軸線方向におけるスラスト荷重をお互いに逆向きに作用させて相殺することができる。それ故に、ハウジングあるいは入力軸の軸受等に無理な荷重が加わるのを防止することができ、又、軸受領域等における潤滑油の温度上昇を抑制でき、それ故に接触界面に潤滑油膜を形成させてトラクション力を確実に得ることができる。
すなわち、入力軸から入力される回転駆動力は、第1変速ユニットにおいて、第1変速リングを適宜駆動しつつ、第1サンローラ→複数の第1遊星ローラ→第1出力リングを経由して変速され、又、第2変速ユニットにおいて、第2変速リングを適宜駆動しつつ、第2サンローラ→複数の第2遊星ローラ→第2出力リングを経由して変速され、出力回転体を介して、出力軸から変速された回転駆動力として出力され、特に、第1サンローラと第2サンローラに作用する互いに反対向きのスラスト荷重は、入力軸が受けることで相殺されるため、軸受等に作用するスラスト荷重を抑制することができ、それ故に、第1サンローラと第1遊星ローラとの接触圧(法線荷重)及び第2サンローラと第2遊星ローラとの接触圧(法線荷重)を大きくすることができ、確実なトラクション力を得ることができる。また、二つの変速ユニットに共通部品を採用することで、構造を簡素化しつつ、部品の種類を減らして、コストを低減することができる。
特に、第1出力リングと出力回転体の間又は第2出力リングと出力回転体の間において回転差が生じると、ローディングカム機構のカム作用により入力軸の軸線方向に押圧力が発生し、第1出力リングを第1遊星ローラにかつ第2出力リングを第2遊星ローラに押し付ける法線荷重すなわちトラクション力が増加する。これにより、外部から負荷トルクが加わっても、トラクション力が確実に得られて出力軸は所定の変速比で確実に回転駆動される。
この構成によれば、第1出力リング及び第2出力リングの一方(及び出力回転体)と第1出力リング及び第2出力リングの他方との間において回転差が生じると、ローディングカム機構のカム作用により入力軸の軸線方向に押圧力が発生し、第1出力リングを第1遊星ローラにかつ第2出力リングを第2遊星ローラに押し付ける法線荷重すなわちトラクション力が増加する。これにより、外部から負荷トルクが加わっても、トラクション力が確実に得られて出力軸は所定の変速比で確実に回転駆動される。
この構成によれば、駆動機構で二つの変速リングを同期させて駆動するため、二つの変速ユニット(第1変速ユニット及び第2変速ユニット)において変速比のズレを生じないようにすることができるため、一つの入力軸→二つの変速ユニット→一つの出力軸という駆動力の伝達を確実に行わせることができる。
この構成によれば、第1サンローラ(又は第2サンローラ)と第1遊星ローラ(又は第2遊星ローラ)が常時直結(トラクション力を発生するように密接)されているのではなく、入力軸の回転速度が増加すると、トリガ機構がオン作動して第1サンローラ(又は第2サンローラ)の回転駆動力がトラクション力を介して第1遊星ローラ(又は第2遊星ローラ)に伝達されるため、入力軸の回転を所望のタイミングで出力軸に連動させることができ、一方、入力軸の回転速度が減少すると、トリガ機構がオフ作動して第1サンローラ(又は第2サンローラ)の回転駆動力は第1遊星ローラ(又は第2遊星ローラ)に伝達されないため、入力軸の回転に拘わらず出力軸をフリー(外力により回転可能)にすることができる。
この構成によれば、入力軸の回転速度に応じて(例えば、回転速度が所定レベルよりも遅くなると、付勢手段の付勢力により、第1サンローラ(又は第2サンローラ)を第1遊星ローラ(又は第2遊星ローラ)から積極的に離脱させることができ、回転力の伝達を確実に遮断することができる。
10 ハウジング
11 フランジ壁部
12 軸受
13 リングシール
14 連結ガイドロッド
15,16 カバー
17 軸受
18 リングシール
20,20´ 入力軸
21 外部入力軸
21a 回転フランジ
21b 連結穴
22,22´ 内部入力軸
22a 一端部
22b 他端部
22c ストッパ
23 端部入力軸
23a 回転フランジ
23b 連結孔
U1 第1変速ユニット
U2 第2変速ユニット
30 第1サンローラ
30´,30´´ 第2サンローラ
31 外周面
32 凹部
32´´ 円筒部
33´´ 縮径円筒部
40 第1遊星ローラ
40´ 第2遊星ローラ
41 第1円錐部
42 第2円錐部
43 軸部
44 第1可動ホルダ
44´ 第2可動ホルダ
50 第1出力リング
50´,50´´ 第2出力リング
51 内周面
52 端面
53´´ 大径スリーブ
54´´ 歯車
55´´ 軸受
60 第1変速リング
60´ 第2変速リング
61 内周面
62 雌ネジ部
63 被ガイド部
70 駆動機構
71 リードスクリュー
72 歯車
73 ウォーム
74 モータ
80,80´ トリガ機構
81 遠心ウエイト
82 端面
83 傾斜面
84 コイルスプリング(付勢手段)
90 出力回転ギヤ(出力回転体)
91 歯車
92,92´ 端面
93,93´ 小径スリーブ
94,94´ 大径スリーブ
95 軸受
100,100´ ローディングカム機構
101,102 カム溝
103 転動体
110 出力軸
111 歯車
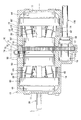
この無段変速装置は、図2及び図3に示すように、ハウジング10、入力軸20、ハウジング10内において入力軸20の軸線方向Lに垂直な面に対して対称的に向かい合うように設けられた第1変速ユニットU1及び第2変速ユニットU2、駆動機構70、二つのトリガ機構80,80´、出力回転体としての出力回転ギヤ90、二つのローディングカム機構100,100´、出力軸110等を備えている。
第2変速ユニットU2は、図3に示すように、円錐台状に形成された第2サンローラ30´、第2サンローラ30´の外周面を転動する複数の第2遊星ローラ40´、第2遊星ローラ40´を内接させると共に回動自在に支持された第2出力リング50´、第2遊星ローラ40´に一体的に形成された第2円錐部42を転動自在に内接させると共にその内接位置を移動させて変速する第2変速リング60´等を備えている。
そして、ハウジング10内には、二つの変速ユニットU1,U2のトラクション力が発生する接触界面、その他の摺動面、転動面等に供給される潤滑油が注入されている。
外部入力軸21は、図3に示すように、円板状の回転フランジ21a、内部入力軸22を連結する連結穴21bを備えており、軸受12を介してハウジング10(フランジ壁部11)に回動自在に支持されている。回転フランジ21aは、第1サンローラ30の端面と対向する位置に配置されて後述するトリガ機構80の端面82を画定している。
内部入力軸22は、図3に示すように、一端部22a、他端部22b、ストッパ22cを備えており、第1サンローラ30と第2サンローラ30´をお互いに向き合うように(円錐台状の小径側をお互いに向かい合わせるように)配置した状態で、第1サンローラ30を一体的に回転するようにかつ軸線方向Lに所定量だけ移動可能に(ストッパ22cで左向きの移動を規制するように)連結し、第2サンローラ30´を螺合により固定して一体的に回転するように連結している。また、内部入力軸22は、一端部22aが外部入力軸21の連結孔21bに挿入され、他端部22bが端部入力軸23の後述する連結孔23bに挿入されて、同軸上に(共通の軸線Lを画定するように)配置されている。
端部入力軸23は、図3に示すように、円板状の回転フランジ23a、内部入力軸22を連結する連結孔23bを備えており、軸受12を介してハウジング10(フランジ壁部11)に回動自在に支持されている。
そして、外部入力軸21、内部入力軸22、及び端部入力軸23は、軸線L回りに一体的に回転するようにかつ軸線方向Lにそれぞれ相対的に移動可能に連結されている。
第2サンローラ30´は、図3に示すように、略円錐台状に形成され、第2遊星ローラ40´が転動する円錐面状の一部をなす外周面31、端面に形成された凹部32等を備えるように形成されている。第2サンローラ30´は、凹部32において、トリガ機構80´の遠心ウエイト81を受ける傾斜面83を画定している。
第2遊星ローラ40´は、図3に示すように、第2サンローラ30´(外周面31)を転動する第1円錐部41、第2変速リング60´に内接する先細り状の第2円錐部42、第1円錐部41及び第2円錐部42の共通の軸部43を備えている。
第1遊星ローラ40の軸部43は、第1可動ホルダ44に対して所定の範囲内で遊動自在に保持されている。第2遊星ローラ40´の軸部43は、第2可動ホルダ44´に対して所定の範囲内で遊動自在に保持されている。
第2可動ホルダ44´は、骨組み構造(鳥籠形状)に形成され、ハウジング10内において他の部品と接触しないように、端部入力軸23の回転フランジ23aの外周面と後述する出力回転ギヤ90の小径スリーブ93´に軸受を介して保持され、入力軸20(内部入力軸22)回りに回動自在で、第2遊星ローラ40´を公転可能に保持している。
第2出力リング50´は、図3に示すように、第2遊星ローラ40´の第1円錐部41が内接して転動する内周面51、ローディングカム機構90´が介在する環状の端面52等を備えるように形成されている。そして、第2出力リング50´は、後述する出力回転ギヤ90の大径スリーブ94´に回動自在にかつ軸線方向Lに可動に支持され、第2遊星ローラ40´が回転及び公転することで、そのトラクション力により回転するようになっている。したがって、内周面51における法線荷重を大きくすることにより、より大きなトラクション力が得られ、回転力が確実に伝達される。
第2変速リング60´は、図3に示すように、第2遊星ローラ40´の第2円錐部42に接触する内周面61、駆動機構70の一部をなすリードスクリュー71が螺合する雌ネジ部62、連結ガイドロッド14に外嵌されてガイドされる被ガイド部63等を備えるように形成されている。そして、第2変速リング60´は、ハウジング10内において、入力軸20(内部入力軸22)回りに回転不能に保持された状態で、入力軸20(内部入力軸22)の軸線方向Lに所定範囲に亘って往復動自在に支持されている。
そして、モータ74が一方向に回転すると、ウォーム73→歯車72→リードスクリュー71を介して、二つの変速リング60,60´を図4の軸線方向Lの中央に向けてお互いに近接するように同期させて駆動し(移動させ)、一方、モータ74が逆向きに回転すると、ウォーム73→歯車72→リードスクリュー71を介して、二つの変速リング60,60´を図4中の軸線方向Lの両外側に向けてお互いに離隔するように同期させて駆動する(移動させる)ようになっている。
具体的には、図4に示すように、第1変速リング60及び第2変速リング60´が、第2円錐部42の所定の中立位置Nにおいて接触している場合、第1遊星ローラ40は第1出力リング50に対して転動しかつ第2遊星ローラ40´は第2出力リング50´に対して転動し、第1出力リング50及び第2出力リング50´は回転することなく停止した状態、すなわち、出力軸110も停止した状態にある。
次に、第1変速リング60及び第2変速リング60´をハウジング10内の両側に向けて(図4中において矢印Dで示すように)、すなわち第2円錐部42の小径端部側に向けて接触位置を移動させると、第1出力リング50及び第2出力リング50´の回転速度は次第に増速され、出力軸110も増速されて回転するようになっている。
一方、第1変速リング60及び第2変速リング60´を中立位置Nから反対側(ハウジング10内の中央側)に向けて(図4中において矢印Rで示すように)、第2円錐部42の大径端部側に接触位置を移動させると、第1出力リング50及び第2出力リング50´は逆向きに回転するようになっている。
トリガ機構80´は、入力軸20すなわち第2サンローラ30´の回転速度に応じて、第2サンローラ30´と第2遊星ローラ40´の間でのトラクション力による回転力の伝達をオン/オフするものであり、図3に示すように、球状をなす複数の遠心ウエイト81、端部入力軸23の回転フランジ23aに形成された端面82、第2サンローラ30´の凹部32に形成された複数の傾斜面83、第2サンローラ30´を第2遊星ローラ40´から離す向きに付勢力を及ぼす付勢手段としてのコイルスプリング84により構成されている。
一方、入力軸20(第1サンローラ30)の回転速度が減少すると、遠心ウエイト81が径方向の中心寄りに移動して、傾斜面83を押す力が弱くなり、第1サンローラ30はコイルスプリング84の付勢力により複数の第1遊星ローラ40から抜け出すように僅かに移動する(オフ作動する)。その結果、トラクション力が小さくなり、入力軸20(第1サンローラ30)の回転駆動力は第1遊星ローラ40に伝達されなくなり、入力軸20(第1サンローラ30)の回転に拘わらず出力軸110は自由に回転する(外力により回転する)ことができるようになる。
このように、トリガ機構80がオン作動する際に、第1サンローラ30はくさび作用を強めるように形成されているため、第1サンローラ30と第1遊星ローラ40との接触面における法線荷重すなわちトラクション力を確実に得ることができる。
尚、トリガ機構80´は、第2サンローラ30´と第2遊星ローラ40´に対して、前述のトリガ機構80と同様の作用をなすため、説明を省略する。
端面92は第1出力リング50の端面52と対向し、端面92´は第2出力リング50´の端面52と対向するようになっている。
ローディングカム機構100´は、図3ないし図5Bに示すように、第2出力リング50´の端面52に形成された円弧状の複数のカム溝101、出力回転ギヤ90の端面92´においてカム溝101に対応して形成された複数のカム溝102、両方のカム溝101,102内に介在する転動体103等を備えている。
また、ローディングカム機構100´は、第2出力リング50´と出力回転ギヤ90の間に相対的な回転差を生じると、転動体103が移動してカム溝101,102によりカム作用を受け、入力軸20(内部入力軸22)の軸線方向Lに押圧力(スラスト荷重)を発生する。すると、第2出力リング50´と第2遊星ローラ40´(及び第1出力リング50と第1遊星ローラ40)の接触面での法線荷重が増加し、又、スラスト荷重の反力として第2出力リング50´(及び第1出力リング50)と出力回転ギヤ90が一体的に回転するようになる。
また、第1出力リング50が第1遊星ローラ40に押圧される法線荷重が大きくなると、第1サンローラ30と第1遊星ローラ40の接触圧(法線荷重)も大きくなり、第1サンローラ30と第1遊星ローラ40の接触位置を支点として、第1遊星ローラ40の第2円錐部42と第1変速リング60との接触圧(法線荷重)も大きくなる。
さらに、第2出力リング50´が第2遊星ローラ40´に押圧される法線荷重が大きくなると、第2サンローラ30´と第2遊星ローラ40´の接触圧(法線荷重)も大きくなり、第2サンローラ30´と第2遊星ローラ40´の接触位置を支点として、第2遊星ローラ40´の第2円錐部42と第2変速リング60´との接触圧(法線荷重)も大きくなる。
したがって、全体としてトラクションドライブにおける法線荷重が増加し、外部から負荷トルクが加わっても、トラクション力が確実に得られて、出力軸110は所定の変速比で確実に回転駆動される。
したがって、入力軸20の回転駆動力は、二つの変速ユニットU1,U2により変速され、その変速された回転駆動力が出力回転ギヤ90を介して出力軸110に伝達されることになる。
先ず、入力軸20が停止している場合、二つの変速ユニット(第1変速ユニットU1,第2変速ユニットU2)にはトラクション力が発生せずトルクが伝達されないため、出力軸110は自由に回転できる状態にある(オフの状態)。
続いて、入力軸20が停止した状態から回転し始め、その回転速度が上昇すると、トリガ機構80,80´がオン作動して(遠心ウエイト81が径方向外向きに移動して、第1サンローラ30を第1遊星ローラ40内に入り込ませかつ第2サンローラ30´を第2遊星ローラ40´内に入り込ませ)、第1サンローラ30が第1遊星ローラ40に押し付けられかつ第2サンローラ30´が第2遊星ローラ40´に押し付けられて、所定レベル以上の法線荷重すなわちトラクション力が発生し、第1サンローラ30から第2遊星ローラ40にかつ第2サンローラ30´から第2遊星ローラ40´にトルク(回転駆動力)が伝達される。
特に、第1サンローラ30と第2サンローラ30´に作用する互いに反対向きのスラスト荷重は、入力軸20(内部入力軸22)が受けることで相殺されるため、軸受12等に作用するスラスト荷重を抑制することができ、それ故に、第1サンローラ30と第1遊星ローラ40との接触圧(法線荷重)及び第2サンローラ30´と第2遊星ローラ40´との接触圧(法線荷重)を大きくすることができ、確実なトラクション力を得ることができる。また、二つの変速ユニットU1,U2に共通部品を採用することで、構造を簡素化しつつ、部品の種類を減らして、コストを低減することができる。
すなわち、この装置によれば、構造の簡素化、小型化、機能上の信頼性の向上、コストの低減等を達成しつつ、十分なトラクション力あるいは伝達トルクを確保でき、伝達効率を向上させることができ、法線荷重の増加に伴う入力軸20の軸線方向Lのスラスト荷重を相殺でき、安定して所望の変速比に確実に変速することができる。
この無段変速装置は、図6に示すように、ハウジング10、入力軸20´、第1変速ユニットU1(第1サンローラ30、第1遊星ローラ40、第1出力リング50、第1変速リング60)及び第2変速ユニットU2(第2サンローラ30´´、第2遊星ローラ40´、出力回転体を兼ねる第2出力リング50´´、第2変速リング60)、駆動機構70、トリガ機構80、ローディングカム機構100、出力軸110等を備えている。
内部入力軸22´は、図6に示すように、一端部22a、他端部22b、ストッパ22cを備えており、第1サンローラ30と第2サンローラ30´´をお互いに向き合うように(円錐台状の小径側をお互いに向かい合わせるように)配置した状態で、第1サンローラ30を一体的に回転するようにかつ軸線方向Lに所定量だけ移動可能に(ストッパ22cで左向きの移動を規制するように)連結し、第2サンローラ30´´を螺合により固定して一体的に回転するように連結している。
そして、第2出力リング50´´は、軸受55´´を介して内部入力軸22´に回動自在にかつ軸線方向Lに僅かに可動に支持され、第2遊星ローラ40´が回転及び公転することで、そのトラクション力により回転するようになっている。
すなわち、第2出力リング50´´には、前述の出力回転ギヤ90に相当するもの(歯車54´´)が一体的に形成されている。
上記実施形態においては、二つトリガ機構80,80´又は一つのトリガ機構80を採用した場合を示したが、これに限定されるものではなく、トリガ機構80,80´を廃止してもよい。
上記実施形態においては、トリガ機構80,80´の一部として付勢手段(コイルスプリング84)を採用した場合を示したが、これに限定されるものではなく、一方の付勢手段(コイルスプリング84)のみを採用してもよく、又、付勢手段(コイルスプリング84)を全て廃止してもよい。
Claims (5)
- ハウジングに回動自在に支持された入力軸と、前記入力軸の回転をトラクション力によりそれぞれ無段変速するべく,前記入力軸の軸線方向に垂直な面に対して対称的に向かい合うように前記ハウジング内に設けられた第1変速ユニット及び第2変速ユニットと、前記第1変速ユニット及び第2変速ユニットにより変速された回転に連動して回転するべく前記入力軸回りに回動自在に支持された出力回転体と、前記出力回転体に連動して回転するべく前記ハウジングに回動自在に支持された出力軸とを備えた無段変速装置であって、
前記第1変速ユニットは、前記入力軸と一体的に回転する円錐台状の第1サンローラと、前記第1サンローラの外周面を転動する複数の第1遊星ローラと、前記第1遊星ローラを内接させると共に回動自在に設けられた第1出力リングと、前記第1遊星ローラに一体的に形成された円錐部を転動自在に内接させると共にその内接位置を移動させて変速するべく前記入力軸回りに回転不能に保持された状態で前記入力軸の軸線方向に可動に設けられた第1変速リングとを含み、
前記第2変速ユニットは、前記入力軸と一体的に回転する円錐台状の第2サンローラと、前記第2サンローラの外周面を転動する複数の第2遊星ローラと、前記第2遊星ローラを内接させると共に回動自在に設けられた第2出力リングと、前記第2遊星ローラに一体的に形成された円錐部を転動自在に内接させると共にその内接位置を移動させて変速するべく前記入力軸回りに回転不能に保持された状態で前記入力軸の軸線方向に可動に設けられた第2変速リングとを含み、
前記出力回転体は、前記第1出力リングと前記第2出力リングの間に配置され、
前記第1出力リングと前記出力回転体の間及び前記第2出力リングと前記出力回転体の間の少なくとも一方の間には、回転力を伝達し得ると共に前記入力軸の軸線方向に押圧力を発生するローディングカム機構が配置されている、
ことを特徴とする無段変速装置。 - 前記出力回転体は、前記第1出力リング及び第2出力リングの一方に対して一体的に形成され、
前記ローディングカム機構は、前記第1出力リング及び第2出力リングの他方と前記出力回転体の間に配置されている、
ことを特徴とする請求項1に記載の無段変速装置。 - 前記第1変速リングと前記第2変速リングを、前記入力軸の軸線方向において互いに近接及び離隔するように同期させて駆動する駆動機構を含む、
ことを特徴とする請求項1又は2に記載の無段変速装置。 - 前記入力軸の回転速度に応じて、前記第1サンローラと前記第1遊星ローラの間及び/又は前記第2サンローラと前記第2遊星ローラの間でのトラクション力による回転力の伝達をオン/オフするトリガ機構が設けられている、
ことを特徴とする請求項1ないし3いずれか一つに記載の無段変速装置。 - 前記第1サンローラを前記第1遊星ローラから離す向きに付勢力を及ぼす付勢手段及び/又は前記第2サンローラを前記第2遊星ローラから離す向きに付勢力を及ぼす付勢手段が設けられている、
ことを特徴とする請求項4に記載の無段変速装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008533121A JP5203209B2 (ja) | 2006-09-08 | 2007-08-30 | 無段変速装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006244370 | 2006-09-08 | ||
| JP2006244370 | 2006-09-08 | ||
| PCT/JP2007/066857 WO2008029697A1 (en) | 2006-09-08 | 2007-08-30 | Continuously variable transmission |
| JP2008533121A JP5203209B2 (ja) | 2006-09-08 | 2007-08-30 | 無段変速装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2008029697A1 JPWO2008029697A1 (ja) | 2010-01-21 |
| JP5203209B2 true JP5203209B2 (ja) | 2013-06-05 |
Family
ID=39157128
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008533121A Expired - Fee Related JP5203209B2 (ja) | 2006-09-08 | 2007-08-30 | 無段変速装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8002661B2 (ja) |
| EP (1) | EP2060829B1 (ja) |
| JP (1) | JP5203209B2 (ja) |
| WO (1) | WO2008029697A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4978557B2 (ja) * | 2008-05-19 | 2012-07-18 | いすゞ自動車株式会社 | 摩擦車式の無段変速装置 |
| JP5418152B2 (ja) * | 2009-11-02 | 2014-02-19 | いすゞ自動車株式会社 | 摩擦車式の無段変速装置 |
| JP5845621B2 (ja) * | 2011-05-06 | 2016-01-20 | いすゞ自動車株式会社 | 遊星摩擦車式無段変速機 |
| US9732829B1 (en) | 2016-06-23 | 2017-08-15 | Neil D. Koelker | Variable ratio transmission with spherical teeth |
| CN108194595B (zh) * | 2018-01-25 | 2024-11-15 | 倍能科技(广州)有限公司 | 无级变速传动装置 |
| CN113883243A (zh) * | 2020-07-02 | 2022-01-04 | 四川大学 | 一种自适应变速外锥盘式无自旋牵引式无级变速器 |
| CN115923987B (zh) * | 2023-01-16 | 2025-04-25 | 八方电气(苏州)股份有限公司 | 无级变速机构 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2929273A (en) * | 1955-05-12 | 1960-03-22 | Weber Max | Variable-speed friction drive |
| US3293947A (en) * | 1964-07-27 | 1966-12-27 | Chery Walter Valdemar | Torque converter and variable drive |
| JPH06280961A (ja) * | 1993-03-30 | 1994-10-07 | Hitoshi Nakamura | テーパーローラ軸受構成の無段変速装置 |
| JPH11210773A (ja) * | 1998-01-20 | 1999-08-03 | Nippon Seiko Kk | ダブルキャビティ式トロイダル型無段変速機の軸受 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3516305A (en) * | 1968-05-09 | 1970-06-23 | Walter Valdemar Chery | Torque converter |
| JP3112458B2 (ja) | 1989-01-20 | 2000-11-27 | エヌティエヌ株式会社 | 摩擦無段変速装置 |
| JP3029976B2 (ja) | 1995-01-27 | 2000-04-10 | 株式会社コミュータヘリコプタ先進技術研究所 | ヘリコプタの動力伝達装置 |
| JP4018785B2 (ja) | 1998-01-26 | 2007-12-05 | 本田技研工業株式会社 | 等速ジョイントおよびその製造方法 |
| US7011600B2 (en) * | 2003-02-28 | 2006-03-14 | Fallbrook Technologies Inc. | Continuously variable transmission |
| JP5028264B2 (ja) * | 2005-09-06 | 2012-09-19 | 株式会社ミクニ | 遊星ローラ変速装置及びそれを備えた車輌 |
-
2007
- 2007-08-30 EP EP07806334A patent/EP2060829B1/en not_active Ceased
- 2007-08-30 JP JP2008533121A patent/JP5203209B2/ja not_active Expired - Fee Related
- 2007-08-30 WO PCT/JP2007/066857 patent/WO2008029697A1/ja not_active Ceased
-
2009
- 2009-03-05 US US12/379,999 patent/US8002661B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2929273A (en) * | 1955-05-12 | 1960-03-22 | Weber Max | Variable-speed friction drive |
| US3293947A (en) * | 1964-07-27 | 1966-12-27 | Chery Walter Valdemar | Torque converter and variable drive |
| JPH06280961A (ja) * | 1993-03-30 | 1994-10-07 | Hitoshi Nakamura | テーパーローラ軸受構成の無段変速装置 |
| JPH11210773A (ja) * | 1998-01-20 | 1999-08-03 | Nippon Seiko Kk | ダブルキャビティ式トロイダル型無段変速機の軸受 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2008029697A1 (en) | 2008-03-13 |
| US8002661B2 (en) | 2011-08-23 |
| US20090176616A1 (en) | 2009-07-09 |
| JPWO2008029697A1 (ja) | 2010-01-21 |
| EP2060829A4 (en) | 2011-09-07 |
| EP2060829A1 (en) | 2009-05-20 |
| EP2060829B1 (en) | 2013-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5203209B2 (ja) | 無段変速装置 | |
| EP2881619A1 (en) | Continuously variable transmission device | |
| JP4948968B2 (ja) | 遊星ローラ式変速機 | |
| CN101283201B (zh) | 行星滚轮变速装置以及具备该装置的车辆 | |
| CN111212993B (zh) | 变速器 | |
| JP2009057993A (ja) | 無段変速装置 | |
| JP2009047218A (ja) | 無段変速装置 | |
| JP2014062590A (ja) | 減速機 | |
| JP6265061B2 (ja) | 遊星ローラ式トラクションドライブ装置 | |
| JP4944749B2 (ja) | 無段変速装置 | |
| JP6762515B2 (ja) | 複合変速機 | |
| JP2016164432A (ja) | 遊星ローラ式の動力伝達装置 | |
| JP2009222165A (ja) | 無段変速装置 | |
| JP2010112451A (ja) | 無段変速装置 | |
| JP2002039228A (ja) | クラッチ装置 | |
| WO2018084096A1 (ja) | 複合変速モジュール | |
| JP2008095796A (ja) | 遊星ローラ変速装置 | |
| JP4871244B2 (ja) | 摩擦型遊星動力伝達機構 | |
| JP2008019962A (ja) | 遊星ローラ変速装置 | |
| JPH10271748A (ja) | 摩擦ローラ式変速機付電動モータ | |
| JP2025082530A (ja) | ダンパ装置 | |
| JP5488492B2 (ja) | 無段変速機 | |
| JP2006161880A (ja) | 摩擦ローラ式変速機 | |
| JP2013217459A (ja) | 減速機 | |
| JP2009121574A (ja) | 摩擦式増減速装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100803 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120823 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5203209 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |