JP4981203B2 - 光学式エンコーダー - Google Patents
光学式エンコーダー Download PDFInfo
- Publication number
- JP4981203B2 JP4981203B2 JP2000233351A JP2000233351A JP4981203B2 JP 4981203 B2 JP4981203 B2 JP 4981203B2 JP 2000233351 A JP2000233351 A JP 2000233351A JP 2000233351 A JP2000233351 A JP 2000233351A JP 4981203 B2 JP4981203 B2 JP 4981203B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- scale
- optical
- light receiving
- light beam
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images






























Landscapes
- Optical Transform (AREA)
- Diffracting Gratings Or Hologram Optical Elements (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は、光学的手段を用いた光学式変位センサー、特に光学式エンコーダーに関する。
【0002】
【従来の技術】
現在、工作機械のステージや3次元計測定器などに於いては直線方向変位量を検出するための、また、サーボモータなどに於いては回転角を検出するための、光学式や磁気式などのいわゆるエンコーダーが利用されている。
【0003】
光学式エンコーダーは、一般的に、ステージ等の変位を検出しようとする部材に固定されるスケールと、このスケールの変位を検出するためのセンサーヘッドとを備えている。センサーヘッドは、スケールに光ビームを照射する光源と、スケールを透過したまたはスケールで反射された回折光を検出するための光検出器とを有しており、受光した光信号の変化によってスケールの移動を検出している。
【0004】
第一の従来技術として、代表的な光学式エンコーダーについて説明する。図32は、レンズなどの光学部品を必要としない小型・低コストなレーザーエンコーダーの一例として、面発光レーザーと反射型スケールを用いたエンコーダーの構成図である。この面発光レーザーと反射型スケールを用いたレーザーエンコーダーについては例えば論文「面発光型半導体レーザーを用いたマイクロエンコーダー」(山本英二、光学27巻6号(1998))に記載されている。
【0005】
このエンコーダー10は、図32に示されるように、反射型のスケール12とセンサーヘッド14とで構成されている。センサーヘッド14は、面発光レーザー16と光検出器18を含み、これらは共に基材20に固定され、面発光レーザー16と光検出器18の相対的な位置関係は一定に維持されている。スケール12は、紙面に垂直な方向に反射率が周期的に変化するパターンを有している。このパターンは、例えば、ガラス等の透明な基板の表面にアルミニウム等の反射率の高い部材をパターニングすることにより形成されている。
【0006】
スケール12はステージ(図示せず)等と連動してセンサーヘッド14に対して相対的に図32の紙面に垂直な方向に往復運動し、センサーヘッド14はこの移動をスケール12からの反射光の強度変化から検出する。面発光レーザー16から射出された光ビームはスケール12により反射され、この反射光が光検出器18により受光される。スケール12上のパターンは、その反射率が紙面に垂直な方向に周期的に変化するため、光検出器18により受光される反射光の強度変化からスケールの変位量を検出することができる。
【0007】
次に第二の従来技術として、可干渉光源と回折格子スケールを用いたレーザーエンコーダーについて説明する。図33は、レンズなどの光学部品を必要としない小型・低コストなエンコーダーの一例である、可干渉光源と回折格子スケールを用いたレーザーエンコーダーの構成図である。この可干渉光源と回折格子スケールを用いたレーザーエンコーダーについては例えば、「コパル:ロータリーエンコータカタログ」に記載されている。
【0008】
このレーザーエンコーダー30では、図33に示されるように、可干渉光源である半導体レーザー32から射出されたレーザービームが、透過型の回折格子スケール34に照射され、これにより回折干渉パターン36が光検出器40の受光面に生成される。
【0009】
図33に示されるように、各構成パラメータを以下のように定義する。
【0010】
z1:光源とスケール上の回折格子の間隔
z2:スケール上の回折格子と光検出器の間隔
p1:スケール上の回折格子のピッチ
p2:光検出器の受光面上の回折干渉パターンのピッチ
なお、「スケール上の回折格子のピッチ」とは、スケール上に形成される光学特性が変調されたパターンの空間的な周期を意味する。また、「光検出器の受光面上の回折パターンのピッチ」とは、受光面上に生成された回折パターンの強度分布の空間的な周期を意味する。
【0011】
光の回折理論によると、上記のように定義されるz1、z2が以下の(1)式に示す関係を満たすような特定の関係にある時、スケール34の回折格子パターンと相似な強度パターンが光検出器40の受光面上に生成される。
【0012】
(1/z1)+(1/z2)=λ/kp12・・・(1)
ここで、λは光源から射出される光ビームの波長、kは自然数である。
【0013】
このときには、受光面上の回折干渉パターンのピッチp2は、他の構成パラメータを用いて以下の(2)式に示すように表すことが出来る。
【0014】
p2=p1(z1+z2)/z1・・・(2)
光源に対してスケールが回折格子のピッチ方向に変位すると、同じ空間周期を保った状態で回折干渉パターンの強度分布がスケールの変位する方向に移動する。
【0015】
光検出器40は複数の受光エリア42を有しており、受光エリア42はスケール34の移動方向に平行に空間周期p20で配置されており、その空間周期p20は回折格子スケールのピッチp2に等しい。このため、スケール34がピッチ方向にp1だけ移動する毎に、光検出器40からは周期p2で周期的に変化する強度信号が得られる。これにより、スケール34のピッチ方向の変位量が検出される。
【0016】
光学式エンコーダーは高精度、高分解能、非接触式であり、かつ電磁波障害耐性に優れるなどの特徴を有しているため、さまざまな分野で利用されており、特に高精度、高分解能を要するエンコーダーにおいては、光学式が主流となっている。
【0017】
【発明が解決しようとする課題】
しかしながら、従来の光学式エンコーダーは、以下に述べる問題点を有している。
【0018】
第一の従来例は、光源をスケールに対して傾けて配置するために専用の固定台を用いる必要があり、このため、組立が困難となり、コストの上昇を招いている。また、光源とスケールの距離いわゆるギャップが厳しく調整されている必要があり、さもないと、光検出器の所定の部分にスケールからの反射光が入射しなくなり、信号強度や精度に悪影響が生じてしまう。さらに、センサーヘッドの小型化のために、光源と光検出器の受光エリアを近づけて配置しようとすると、スケールからの反射光ビームが光源である面発光レーザーのチップの端に遮られるなどして受光エリアに届かなくなったりする。また、このような事態を避けるため、光源の取付角度をさらに大きくする必要が生じたりする。結局、小型化、低価格化は難しい。
【0019】
また、第二の従来例に示すような構成の場合、スリット等高価な光学部品を使用しており、しかも、これらの光学部品を高精度で組み立てる必要があるため、小型化・低価格化は極めて困難である。
【0020】
また、第一、第二の従来例とも、複数の光学パターンを形成したスケールから情報を読み出す場合、光学パターンの数と同数の光源を用いるか、ビームスプリッタ等を用いてビームを分割する必要があり、小型化、低価格化がいっそう困難である。
【0021】
本発明は、このような事情を考慮して成されたものであり、小型化と低価格化が実現された光学式エンコーダーを提供することである。より具体的には、光源をスケールに対して傾斜させる必要がなく、スケールとヘッド間のギャップ調整などに厳しい精度が要求されない、光学式エンコーダーを提供することである。
【0022】
【課題を解決するための手段】
本発明による光学式エンコーダーは、一面においてはリニアエンコーダーであり、所定周期の光学パターンが形成された可動スケールと、上記光学パターン面に所定形状の光ビームを略垂直に照射する可干渉光源と、上記光学パターンで反射された上記光源からの光ビームを受光して、上記光学パターンによって受光面に生成された回折パターンを検出する光検出手段とを有している。上記可干渉光源から上記光学パターンに至る光ビームの主軸の長さをz1、上記光学パターンから上記光検出手段の受光面に至る光ビームの主軸の長さをz2、上記光学パターンの所定部分のピッチをp1とすると、上記光検出手段の検出ピッチp2は、p2=p1・(z1+z2)/z1となる。
【0023】
本発明による光学式エンコーダーは、別の一面においてはロータリーエンコーダーであり、回動の円周方向に所定周期の光学パターンが形成された回動可能なスケールと、上記回動の回動軸上に位置し、上記スケールの回動中心近傍に、放射される光ビームの主軸が略垂直に入射し、上記光学パターン面に所定形状の光ビームを略垂直に照射する可干渉光源と、上記光学パターンを経由した上記可干渉光源からの光ビームを受光して、上記光学パターンによって受光面に生成された回折パターンを検出する光検出手段とを有している。上記スケールの回動中心近傍に略垂直に入射し、上記スケールは、上記光学パターンを所定の半径r1の円周上に有している。上記可干渉光源と上記光学パターンとの間隔をz1、上記光学パターン面と上記光検出手段の受光エリアとの間隔をz2とすると、上記光検出手段の受光エリアは、半径r2=r1(z1+z2)/z1で決められる半径r2を有する円周上の上記所定周期位置に受光エリアを有する受光エリア群により構成されている。上記可干渉光源からの光ビームが照射される部分の、上記光学パターンのピッチをp1とすると、上記光検出手段の検出ピッチp2は、p2=p1・(z1+z2)/z1となる。
【0027】
【発明の実施の形態】
以下、図面を参照しながら本発明の実施の形態について説明する。
【0028】
第一の実施の形態は反射型の光学式リニアエンコーダーであり、これについて図1ないし図4を参照しながら説明する。
【0029】
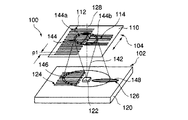
図1に示されるように、本実施の形態の光学式リニアエンコーダー100は、移動検出のための光学系を含むエンコーダーヘッド102と、エンコーダーヘッド102に対して並進移動可能な可動スケール104とを備えている。
【0030】
可動スケール104は、光学的に透明な基板たとえばガラス基板110の表面に形成された、スケール104の移動検出用の第一の光学パターン112と、スケール104の基準位置検出用の第二の光学パターン114とを備えている。
【0031】
第一の光学パターン112は、スケール104の移動方向に沿ってスケール104のほぼ全体に延びており、スケール104の移動方向に沿って一定の周期p1で変化する反射率を有している。第一の光学パターン112は、例えば、透明な基板110に対して、高い反射率を有する金属等の同じ幅の細長い膜を、一定の間隔(例えばp1/2)を置いて成膜して形成される。
【0032】
第二の光学パターン114は、スケール104の移動方向に関してスケール104の一部の領域のみに存在し、スケール104の移動方向に関して集光作用を有している。第二の光学パターン114は、例えば、ホログラフィックパターン、例えばシリンドリカル・ホログラムレンズである。
【0033】
エンコーダーヘッド102は、可干渉な光を放射する光源すなわち可干渉光源122と、第一の光学パターン112からの反射光を検出するための移動検出用の第一の光検出手段あるいは光検出器124と、第二の光学パターン114からの反射光を検出するための基準位置検出用の第二の光検出手段あるいは光検出器126とを備えており、これらは共に基板120に保持されている。
【0034】
例えば、基板120は例えば半導体基板であり、第一の光検出器124と第二の光検出器126は共に半導体基板120に形成されている。可干渉光源122は例えば単体の面発光レーザーであり、接着等の手段によって平坦な基板120に固定されている。つまり、光源122と光検出器124と126は、基板120に対してハイブリッドに設けられている。面発光レーザー122は平坦な基板120に固定されるので、その取り付けは容易に行なえる。
【0035】
可干渉光源122は、好ましくは面発光レーザーであるが、面発光レーザーに限定されるものではなく、端面発光レーザーや発光ダイオード(LED)等であってもよい。しかしながら、面発光レーザーは、レンズ等の光学部品を用いることなく、所望の形状の光ビームを射出させることができるため、小型化という目的にとっては特に好適である。
【0036】
エンコーダーヘッド102と可動スケール104は、言い換えれば基板120と透明基板110は、一定の間隔を置いて互いに平行に配置されている。従って、面発光レーザー122から放射される光ビーム142は、スケール104の表面に実質的に垂直に照射される。すなわち、面発光レーザー122から可動スケール104に向かう光ビーム142の主軸128は、可動スケール104に実質的に垂直である。
【0037】
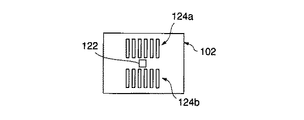
第一の光検出器124は、図2に示されるように、複数の受光エリア130、別の言い方をすれば、フォトダイオード等の受光素子を備えている。この複数の受光エリア130は、第一の受光エリア群132と、第二の受光エリア群134と、第三の受光エリア群136と、第四の受光エリア群138とを含んでいる。
【0038】
同じ受光エリア群に属する受光エリアはp2のピッチで並んでおり、従って、隣接する二つの受光エリアはp2/4のピッチで並んでいる。より一般的には、同じ受光エリア群の受光エリアはp2×n(n=1,2,3,・・・)のピッチで並んでおり、隣接する二つの受光エリアは(p2/4)×m(m=1,2,3,・・・)のピッチで並んでいる。
【0039】
それぞれの受光エリア群の受光エリアは櫛の歯状に並んでおり、それらは他の受光エリア群の受光エリアと互いに噛み合うように配置されている。
【0040】
同じ受光エリア群の受光エリアは互いに電気的に接続されており、第一の受光エリア群132はA+信号を、第二の受光エリア群134はA-信号を、第三の受光エリア群136はB+信号を、第四の受光エリア群138はB-信号を出力する。ここにおいて、A-信号はA+信号の反転信号すなわち位相が180度ずれた信号を意味している。B-信号とB+信号の関係も同様である。
【0041】
これらの信号は(図示しない)信号処理回路によって処理され、A+信号とA-信号の減算によってA相信号が生成され、B+信号とB-信号の減算によってB相信号が生成される。信号処理回路は、例えば、光検出器124や光検出器126と同様に、半導体基板120に形成されるとよい。
【0042】
第二の光検出器126は、図3に示されるように、単一の受光エリア140、別の言い方をすれば、フォトダイオード等の受光素子を備えている。
【0043】
次に、図1に戻って本実施の形態のリニアエンコーダーの動作について説明する。
【0044】
面発光レーザー122から射出される光ビーム142は、可動スケール104に垂直に照射され、その表面にビームスポット144を形成する。ビームスポット144の一部144aは、常に第一の光学パターン112を当たっており、そこからの反射光のビームは第一の光検出器124を照明し、その受光面に第一の光学パターン112によって形成された回折干渉パターン146が投影される。この回折干渉パターン146は、ピッチp2=p1(z1+z2)/z1の周期を有する明暗パターンであり、この明暗パターンは、スケール104の移動に従って光検出器124の受光エリア130上をスケール104の移動方向と平行に移動する。
【0045】
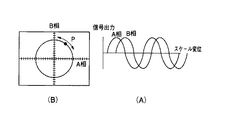
前述したように、第一の光検出器124は、第一〜第四の受光エリア群を含む複数の受光エリア130を備えており、各受光エリア群の出力に基づいて、図4(A)に示されるように、A相信号とB相信号が生成される。A相信号とB相信号は、それぞれ特定の位置における回折干渉パターン146の位相を反映しており、両者は互いに、回折干渉パターン146の周期pの4分の1の周期、すなわち位相が90度ずれている。このA相信号とB相信号から、図4(B)に示されるように、リサージュ図形が得られる。
【0046】
A相信号とB相信号が正弦波に近似される場合、リサージュ図形は円形となる。図4(B)の点Pは、ある時点における、光検出器124に対するスケール104の相対的な位置を示しており、スケール104の移動に従って、このリサージュ図形の円周上を移動する。さらに、点Pの移動の速度と方向は、スケール104の移動の速度と方向に依存する。従って、リサージュ図形上の点Pの移動速度と移動方向に基づいて、スケール104の移動速度と移動方向を検出できる。
【0047】
また、ビームスポット144の別の一部144bは、スケール104が基準位置にあるとき、第二の光学パターン114、例えばシリンドリカル・ホログラムレンズに照射される。その反射光のビームは、スケール104の移動方向の寸法が絞られて、第二の光検出器126を好適に照明するビームスポット148を形成する。その結果、第二の光検出器126で光が感知され、基準位置信号が検出される。
【0048】
一方、スケール104が基準位置から外れているときは、ビームスポット144の別の一部144bは、第二の光学パターン114から外れているため、第二の光検出器126で光は感知されず、基準位置信号は検出されない。
【0049】
このように、リニアエンコーダー100は、第二の光学パターン114と第二の検出器126を備えているため、スケール104の基準点位置を検出することができる。さらに、シリンドリカル・ホログラムレンズの利用により、スケール104の基準位置を高い精度で検出できる。
【0050】
特に、受光エリア140は、より好ましくは、p1(z1+z2)/z1より狭い幅を有している。ここに、幅はスケール104の移動方向に沿う寸法であり、z1は光源122からスケール104に向かう光ビームの主軸の長さであり、z2は光学パターン114から受光エリア140に向かう光ビームの主軸の長さである。この場合、この場合には、スケール104の基準点位置を、スケール104の光学パターン112の周期p1以下の感度で検出できる。
【0051】
面発光レーザー122の厚さがz1とz2に較べて十分小さい場合、z1とz2の比は一定となるため、光検出器124に投影される回折干渉パターン146の周期p2は変化しない。また、光検出器124に投影される回折干渉パターン146は、z1とz2の変化に対して、スケール104の移動方向に直交する方向に移動するので、検出される位置精度には全く影響を及ぼさない。
【0052】
以上の説明から分かるように、本実施の形態のリニアエンコーダーは、面発光レーザー122は平坦な基板120に取り付けられるので、量産性に優れている。光源122からの光ビーム142がスケール104にほぼ垂直に照射されるので、小型化に適している。また、一つの光源122で異なる二つの光学パターン112と124を照明し、異なるスケール情報を得ているので、小型で高性能である。
【0053】
本実施の形態は、様々な変形が可能である。基準位置検出のための第2の光学パターン114は、シリンドリカル・ホログラムレンズに限定されるものではなく、スケール104の移動方向に関して基準位置で光学特性が変化するパターンであればどのようなものでもよい。また、光検出器126は単一の受光エリアに限定されるものではなく、並列に配置された複数の受光エリアを備えていてもよい。また、第二の光学パターン114に対応する受光エリアパターンを備えていてもよい。
【0054】
また、z1=z2とするために、例えば、面発光レーザー122を沈下させて配置することで、面発光レーザー122の射出面と光検出器124の受光面の高さが揃えられてもよい。また、受光エリアの実効的な受光面の高さを上げるために、例えば光学的距離を調整する屈折率部材が光路中に配置されてもよい。
【0055】
以下、いくつかの変形例について図面を参照しながら説明する。
【0056】
第一の変形例は、光源の改良に関するものであり、図5に示されるように、両面発光の面発光レーザー150を備えている。面発光レーザー150は、スケールに向き合う上面から光ビーム142を射出すると共に、その反対側の下面から光ビーム152を射出する。
【0057】
基板120はレーザー取付部154を備えており、レーザー取付部154は金属パターンで形成されており、面発光レーザー150の下面の電極と電気的に接続される。レーザー取付部154は、その中央部分に、面発光レーザー150の下面から射出される光ビーム152を通過させる開口を有している。
【0058】
基板120は、さらに、レーザー取付部154の開口を通過した光ビーム152の強度を検出するための受光部158を備えている。受光部158は入射する光ビーム152の強度に応じた信号を出力する。
【0059】
面発光レーザー150では、上面から射出される光ビーム142と下面から射出される光ビーム152の光強度の比は一定である。従って、受光部158からの出力信号に従って、例えば(図示しない)処理回路によって、面発光レーザー150の駆動を制御することにより、面発光レーザー150の上面から射出される光ビーム142の強度を所望の強度に調整することができる。あるいは、温度の変化等による環境の変化に対しても、光ビーム142の強度を一定に保つように制御することができる。さらには、所定の上限値を越える強度の光ビームが射出されないように制御することもできる。
【0060】
このように本変形例のリニアエンコーダーは、別部品の素子や要素を追加することなく、面発光レーザー150から射出される光ビーム142の強度を制御することができる。
【0061】
第二の変形例は、スケールの改良に関するものであり、図6に示されるように、スケール104は、第一の光学パターン112と第二の光学パターン114の間を、スケール104の移動方向に沿って帯状に延びる細長い低反射あるいは非反射の領域116を備えている。別の言い方をすれば、スケール104は、光源から射出される光ビームの主軸近傍の部分が照射される部分に、反射率が低い帯状の細長い領域あるいは反射率がほぼ0に等しい領域116を備えている。
【0062】
このような領域116は、光源から射出された光ビームが、スケール104の主に光学パターン112で、希に光学パターン114で、反射されて、光源に再入射して光源の出力特性を不安定にするという不所望な現象の発生を防止する。別の言い方をすれば、光源とスケールの間でいわゆる複合共振器が形成されることを防止する。その結果、光源から射出される光ビームが安定化される。
【0063】
第三の変形例も、スケールの改良に関するものであり、図7に示されるように、スケール104は、透明基板110の中央部分をスケール104の移動方向に平行に延びる帯状の低反射あるいは非反射の領域116と、その両側に位置する移動検出のための一対の光学パターン112a,112bとを備えており、光学パターン112a,112bは、それぞれ、スケール104の移動方向に沿ってスケール104のほぼ全体に延びており、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。
【0064】
また、エンコーダーヘッド102は、このスケール104に応じて、図8に示されるように、それぞれの光学パターン112a,112bからの反射光を検出するための一対の光検出器124a,124bを備えている。光検出器124a,124bの各々は、図2に示される光検出器124と同様に、第一〜第四の受光エリア群を含む複数の受光エリアを備えている。
【0065】
本変形例では、スケール104が低反射あるいは非反射の領域116を備えているので、光源とスケールの間で複合共振器が形成されることが防止され、その結果、光源から射出される光ビームの安定化が図られる。また、図1の構成と比較して、約二倍の光量の回折干渉パターンを検出するため、ゴミやほこり、スケールの傷や欠陥などに対して強い耐性を有している。
【0066】
第四の変形例も、スケールの改良に関するものであり、図9に示されるように、スケール104は、透明基板110の中央部分をスケール104の移動方向に平行に延びる帯状の低反射あるいは非反射の領域116と、その両側に位置する一対の移動検出用の光学パターン112a,112bと、さらにその両外側に位置する一対の基準位置検出用の光学パターン114a,114bとを備えている。光学パターン112a,112bは、それぞれ、スケール104の移動方向に沿ってスケール104のほぼ全体に延びており、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。光学パターン114a,114bは、それぞれ、スケール104の移動方向に関してスケール104の一部の領域のみに存在し、スケール104の移動方向に関して光を集光させる機能を有している。
【0067】
また、エンコーダーヘッド102は、このスケール104に応じて、図10に示されるように、それぞれの光学パターン112a,112bからの反射光を検出するための一対の光検出器124a,124bと、それぞれの光学パターン114a,114bからの反射光を検出するための一対の光検出器126a,126bとを備えている。光検出器124a,124bの各々は、図2に示される光検出器124と同様に、第一〜第四の受光エリア群を含む複数の受光エリアを備えている。また、光検出器126a,126bの各々は、図8に示される光検出器126と同様に、単一の受光エリアを備えている。
【0068】
本変形例では、スケール104が低反射あるいは非反射の領域116を備えているので、光源とスケールの間で複合共振器が形成されることが防止され、その結果、光源から射出される光ビームの安定化が図られる。また、強い光で照明されることが望ましい移動検出用の光学パターン112a,112bに、光ビームの強度の比較的強い部分が照射され、特に強い光で照明される必要のない基準位置検出用の光学パターン114a,114bに、光ビームの強度の比較的弱い部分が照射されるので、高精度と高機能を両立させている。
【0069】
第五の変形例は、光検出器に関するものであり、図11に示されるように、移動検出用の光検出器124は、第一の受光エリア群132と第二の受光エリア群134を含む受光エリア群130Aと、第三の受光エリア群136と第四の受光エリア群138を含む受光エリア群130Bとを有している。第一の受光エリア群132の受光エリアと第二の受光エリア群134の受光エリアはp2/2のピッチで交互に並んでいる。同様に、第三の受光エリア群136の受光エリアと第四の受光エリア群138の受光エリアもp2/2のピッチで交互に並んでいる。受光エリア群130Aと受光エリア群130Bの隣接する二つの受光エリアは、p2/4+p2×n(nは自然数)の間隔を有している。
【0070】
この光検出器は、隣接する受光エリアのピッチがp2/2であるので、ピッチがp2/4である図2に示される光検出器に比べて、容易に製造することができる。また、一つ一つの受光エリアの面積を大きく取ることができので、スケールの移動検出のS/Nが向上される。また、非常に小さいピッチp2の要求に対して、図2に示される光検出器では、製造が難しくなったり、コストの相当な上昇を招いたりすることが予想されるが、図11に示される光検出器は、同じ要求に対しても、比較的容易に製造することができる。
【0071】
第六の変形例は、スケールに関するものであり、図12に示されるように、スケール104は、スケール104の移動方向に沿ってスケール104のほぼ全体に延びている移動検出用の光学パターン112と、スケール104の移動方向に関して一部の領域に存在している基準位置検出用の光学パターン118とを備えている。光学パターン112は、既に説明したように、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。光学パターン118は、これに照射された光を反射し一点に集光する機能を有しており、ホログラフィックパターン、例えばホログラムレンズで構成されている。
【0072】
本変形例では、基準位置検出用の光学パターン118で反射された光のビームが一点に集光されるので、エンコーダーヘッドとスケールの平行度が多少落ちても、基準位置検出のための光ビームは、スケールが基準位置にある場合には、基準位置検出用の光検出器に安定に照射される。つまり、スケールが基準位置にあるときに基準位置検出用の光検出器の受光面上に形成される小径のほぼ円形のビームスポットは、エンコーダーヘッドとスケールの平行度の低下に対して、その細長い受光面上をその長手方向に沿って移動するだけであるので、基準位置検出用の光検出器に常に十分な量の光が照射される。これは、エンコーダーヘッドとスケールに要求される平行度を緩和し、その取付や組み立てを容易にしたり、あるいはその適用範囲を拡大したりする。
【0073】
第二の実施の形態
図13に示されるように、第二の実施の形態の光学式リニアエンコーダー100は、移動検出のための光学系を含むエンコーダーヘッド102と、エンコーダーヘッド102に対して並進移動可能な可動スケール104とを備えている。
【0074】
可動スケール104は、光学的に透明な基板たとえばガラス基板160の表面に形成された、スケール104の移動検出用の光学パターン162を備えている。光学パターン162は、スケール104のほぼ全面に広がっており、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。
【0075】
エンコーダーヘッド102は、可干渉な光を放射する可干渉光源172と、光学パターン162からの反射光を検出するための光検出手段あるいは光検出器124とを備えており、これらは共に基板170に保持されている。可干渉光源172は例えば面発光レーザーで、接着等の手段によって基板170に固定されている。
【0076】
基板170は例えば半導体基板であり、光検出器174は半導体基板170に形成されている。光検出器174は、面発光レーザー172を取り囲んで基板170のほぼ全面に広がっている複数の受光エリアを有しており、受光エリアは、スケール104の移動方向に沿って一定のピッチで並んでいる。なお、光源の周囲の受光エリアが形成されていない領域は、スケールの移動方向に沿って、Wspace=p2×n(n=1,2,3,・・・)の長さを有していることが望ましい。
【0077】
このように、移動検出用の光学パターン162がスケール104のほぼ全面に形成されており、また、移動検出用の光検出器174もエンコーダーヘッド102のほぼ全面に形成されているので、スケール104で形成される回折干渉パターンを広範囲に渡って検出するので、このリニアエンコーダー100は、スケール104へのごみやほこりの付着や光学パターン162の乱れや傷などに対して高い耐性を有している。
【0078】
さらに、リニアエンコーダー100は、面発光レーザー172から射出される光ビームの主軸上に、光ビームの偏光面あるいは偏波面を45度回転させる1/4波長板176を備えている。1/4波長板176は、面発光レーザー172から射出される光ビームの主軸上のどこに配置されてもよい。例えば、1/4波長板176は、面発光レーザー172の射出窓に取り付けられる。
【0079】
面発光レーザー172への再入射光は、すなわち、面発光レーザー172から射出され、スケール104の光学パターン162で反射され、面発光レーザー172に戻る光は、1/4波長板176を二回通過しているため、面発光レーザー172から射出された直後の光の偏光面あるいは偏波面に対して、90度回転した偏光面あるいは偏波面を有している。このため、この再入射光は、射出直後の光と干渉することがなく、面発光レーザー172の射出光に影響を与えない。従って、面発光レーザー172からは、安定した光ビームが射出される。
【0080】
1/4波長板176は、スケール104の表面に設けれられてもよい。この場合、面発光レーザー172への戻り光の対策が成されていないエンコーダーにおいて、そのスケールを、1/4波長板176を備えたものに交換することによって、エンコーダーヘッドをそのまま流用しながらも、面発光レーザー172への戻り光の問題を解決することができる。
【0081】
第三の実施の形態
図14に示されるように、第三の実施の形態の光学式リニアエンコーダー100は、移動検出のための光学系を含むエンコーダーヘッド102と、エンコーダーヘッド102に対して並進移動可能な可動スケール104とを備えている。
【0082】
可動スケール104は、スケール104の移動検出用の光学パターン202と、スケール104の基準位置検出用の一対の光学パターン204と、光源の出力モニター用の一対の光学パターン206とを備えており、これらの光学パターンは共に、光学的に透明な基板200の表面に形成されている。出力モニター用の一対の光学パターン206は、基準位置検出用の一対の光学パターン204の両外側に配置されている。
【0083】
移動検出用の光学パターン202は、スケール104の移動方向に沿って延びており、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。基準位置検出用の光学パターン204は、スケール104の移動方向に関して一部の領域に存在しており、スケール104の移動方向に関して光を集光させる機能を有している。出力モニター用の光学パターン206は、高い反射率を有しており、スケール104の移動方向に沿って延びている。
【0084】
エンコーダーヘッド102は、移動検出用の光学パターン202に可干渉な光ビームを照射するための第一の光源212と、基準位置検出用の光学パターン204と出力モニター用の光学パターン206に光ビームを照射するための第二の光源214と、移動検出用の光学パターン202からの反射光を検出するための光検出手段あるいは光検出器216と、基準位置検出用の光学パターン204からの反射光を検出するための一対の光検出手段あるいは光検出器218と、出力モニター用の光学パターン206からの反射光を検出するための一対の光検出手段あるいは光検出器220とを備えている。これらの素子は共に基板210に保持されている。
【0085】
第一の光源212と第二の光源214は例えば共に同じ面発光レーザーであり、これらは共に接着等の手段によって基板210に固定されている。基板210は例えば半導体基板であり、光検出器216,218,220は半導体プロセスによって半導体基板210に形成されている。
【0086】
移動検出用の光検出器216は、スケール104の移動方向に沿って一定のピッチで並んでいる複数の受光エリアを有しており、これらの受光エリアは面発光レーザー212を取り囲んで広がっている。基準位置検出用の一対の光検出器218は、それぞれ、スケール104の移動方向に直交する方向に細長い単一の受光エリアを備えており、これら一対の受光エリアは、スケール104の移動方向に直交する方向に関して、面発光レーザー214の両側に配置されている。出力モニター用の一対の光検出器220は、それぞれ、比較的大きな四角形の単一の受光エリアを備えており、これら一対の受光エリアは、スケール104の移動方向に直交する方向に関して、基準位置検出用の一対の光検出器218の両外側に配置されている。
【0087】
面発光レーザー212から射出された光ビームは、スケール104の移動検出用の光学パターン202に照射され、光学パターン202によって形成された回折干渉パターンは、移動検出用の光検出器216に照射される。この回折干渉パターンは、面発光レーザー212から射出された光ビームの主軸を含まない所定領域の全部によって形成されており、その殆どの部分が移動検出用の光検出器216によって検出されるので、このリニアエンコーダー100は、スケール104へのごみやほこりの付着や光学パターン202の乱れや傷などに対して高い耐性を有している。
【0088】
面発光レーザー212から射出された光ビームは、その一部は常に出力モニター用の光学パターン206に照射され、また、他の一部は、スケール104が基準位置にあるときに、スケール104の基準位置検出用の光学パターン204に照射される。
【0089】
出力モニター用の光学パターン206で反射された光は、出力モニター用の光検出器220に照射され、光検出器220からは、面発光レーザー214の出力を反映する信号が出力される。光検出器220からの信号に従って面発光レーザー214の駆動を制御することにより、面発光レーザー212から射出される光ビームの安定化が図られる。
【0090】
また、スケール104が基準位置にあるときに基準位置用の光学パターン204で反射される光は、スケール104の移動方向に平行な方向の寸法が絞られて、基準位置検出の光検出器218に照射され、光検出器218の出力に従って、スケール104が基準位置にあることが検出される。
【0091】
第四の実施の形態
図15に示されるように、第四の実施の形態の光学式リニアエンコーダー100は、移動検出のための光学系を含むエンコーダーヘッド102と、エンコーダーヘッド102に対して並進移動可能な可動スケール104とを備えている。
【0092】
図16に示されるように、可動スケール104は、光学的に透明な基板240の表面に形成された、移動検出用の光学パターン242と、これと同じ構造の光学パターン244と、基準位置検出用の光学パターン246とを備えている。これらの光学パターン242,244,246は、スケール104の移動方向に沿って並んでおり、光学パターン246は光学パターン242と光学パターン244の間に位置している。
【0093】
光学パターン242は、スケール104の移動方向に沿って一定の周期p1で変化する反射率を有している。光学パターン246は、スケール104の移動方向に関して光を集光させる機能を有しており、例えば、シリンドリカル・ホログラムレンズ等のホログラフィックパターンである。
【0094】
図15に示されるように、エンコーダーヘッド102は、可干渉な光を放射する光源252と、スケール104の移動検出用の光検出手段あるいは光検出器254と、スケール104の基準位置検出用の光検出手段あるいは光検出器256とを備えている。光源252と光検出器254と光検出器256は、スケール104の移動方向に沿って並んでおり、光源252は光検出器254と光検出器256の間に位置している。
【0095】
例えば、可干渉光源252は単体の面発光レーザーであり、光検出器254と光検出器256は半導体基板250に一体に形成されており、面発光レーザー252は接着等によって半導体基板250に固定されている。つまり、光源252と光検出器254と光検出器256は基板250にハイブリッドに設けられている。
【0096】
光検出器254は、スケール104の移動方向に直交する方向に細長い複数の受光エリアを備えており、これらの受光エリアは、スケール104の移動方向に沿って、光学パターン242の周期p1の約二倍に等しい一定のピッチp2で並んでいる。また、光検出器256は、スケール104の移動方向に直交する方向に細長い単一の受光エリアを備えている。
【0097】
面発光レーザー252から射出された光ビームは、スケール104に照射され、移動検出用の光学パターン242によって形成された回折干渉パターンは、移動検出用の光検出器254に投影される。また、スケール104が基準位置にあるとき、基準位置検出用の光学パターン246によって反射された光のビームは、スケール104の移動方向の寸法が絞られて、基準位置検出用の光検出器256に照射される。なお、光学パターン244は、移動検出用の光学パターン242と同じ構造を有しているが、スケール104の移動検出には利用されないが、スケール104の移動し過ぎ等の検出に利用される。
【0098】
移動検出用の光検出器254は、図2に示される光検出器124と同様に、第一〜第四の受光エリア群を含む複数の受光エリアを備えている。従って、各受光エリア群の出力に基づいてA相信号とB相信号を得ることができ、これに基づいてスケール104の移動を検出することができる。
【0099】
本実施の形態では、エンコーダーヘッド102は、単体の面発光レーザー252が、光検出器254と光検出器256が一体に形成された半導体基板250に取り付けられたハイブリッド構成であるが、エンコーダーヘッド102の構成はこれに限定されない。
【0100】
例えば、エンコーダーヘッド102は、図17に示されるように、面発光レーザー252と光検出器254と光検出器256が共に半導体製造プロセスによって半導体基板250に一体に集積されたモノリシック構成であってもよい。あるいは、エンコーダーヘッド102は、図18に示されるように、単体の面発光レーザー252と単体の光検出器254と単体の光検出器256とが共に基板250に取り付けられたハイブリッド構成であってもよい。
【0101】
これまで述べてきた第一〜第四の実施の形態において、スケール104の光学パターンは様々に変形されてもよい。スケール104の光学パターンの変形例を図19〜図22に示す。もちろん、これらの変形例の光学パターンの適用においては、光学パターンのレイアウトに応じて、エンコーダーヘッド102の光検出手段あるいは光検出器のレイアウトも変更されるべきである。また、図19〜図20に示されるスケール104の適用においては、エンコーダーヘッド102は、光源からの射出光と光源への戻り光の干渉を防止するための1/4波長板を備えているとよい。
【0102】
図19に示されるスケール104は、移動検出用の光学パターン262と基準位置検出用の光学パターン264と出力モニター用の光学パターン266とを備えており、これらの光学パターンは共に透明基板260に形成されている。移動検出用の光学パターン262は、スケール104の移動方向に沿って延びており、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。基準位置検出用の光学パターン264は、スケール104の移動方向に関して一部の領域に存在しており、スケール104の移動方向に関して光を集光させる機能を有している。出力モニター用の光学パターン206は、一定の高い反射率を有しており、スケール104の移動方向に沿って帯状に延びている。移動検出用の光学パターン262はスケール104のほぼ半面に広がっており、移動検出用の光学パターン262と基準位置検出用の光学パターン264と出力モニター用の光学パターン206は、スケール104の移動方向に直交する方向に並んでいる。
【0103】
図20に示されるスケール104は、移動検出用の光学パターン262と出力モニター用の光学パターン266とを備えている。移動検出用の光学パターン262は、スケール104の移動方向に沿って延びており、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。出力モニター用の光学パターン206は、一定の高い反射率を有しており、スケール104の移動方向に沿って帯状に延びている。移動検出用の光学パターン262はスケール104のほぼ半面に広がっており、出力モニター用の光学パターン206はスケール104の残りの半面のほぼ全体に広がっている。
【0104】
図21に示されるスケール104は、移動検出用の光学パターン262と基準位置検出用の一対の光学パターン264とを備えている。移動検出用の光学パターン262は、スケール104の移動方向に沿って延びており、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。基準位置検出用の光学パターン264は、スケール104の移動方向に関して一部の領域に存在しており、スケール104の移動方向に関して光を集光させる機能を有している。移動検出用の光学パターン262はスケール104の中央部に広がっており、基準位置検出用の光学パターン264はスケール104の両側に位置している。
【0105】
図22に示されるスケール104は、移動検出用の光学パターン262と出力モニター用の光学パターン266とを備えている。移動検出用の光学パターン262は、スケール104の移動方向に沿って延びており、スケール104の移動方向に沿って一定の周期で変化する反射率を有している。出力モニター用の光学パターン206は、一定の高い反射率を有しており、スケール104の移動方向に沿って帯状に延びている。移動検出用の光学パターン262はスケール104の中央部に広がっており、出力モニター用の光学パターン206はスケール104の両側に位置している。
【0106】
また、移動検出用の光検出器も様々に変形されてよい。移動検出用の光検出器の変形例を図23〜図25に示す。
【0107】
図23に示される移動検出用の光検出器280は、二種類の受光エリア群すなわち第一の受光エリア群282と第二の受光エリア群284を備えている。第一の受光エリア群282と第二の受光エリア群284はスケールの移動方向に沿って交互に並んでいる。第一の受光エリア群282と第二の受光エリア群284の各々は、それぞれ、一定のピッチp2で並ぶ四つの受光エリアを有している。第一の受光エリア群282と第二の受光エリア群284の隣接する二つの受光エリアは、p2/4×n(nは自然数)の間隔を有している。
【0108】
図24に示される移動検出用の光検出器280は、四種類の受光エリア群すなわち第一の受光エリア群282と第二の受光エリア群284と第三の受光エリア群286と第四の受光エリア群288を備えている。第一の受光エリア群282と第二の受光エリア群284と第三の受光エリア群286と第四の受光エリア群288はスケールの移動方向に沿って交互に並んでいる。第一の受光エリア群282と第二の受光エリア群284と第三の受光エリア群286と第四の受光エリア群288の各々は、それぞれ、一定のピッチp2で並ぶ四つの受光エリアを有している。隣接する二つの受光エリア群の隣接する二つの受光エリアは、p2/4×n(nは自然数)の間隔を有している。
【0109】
図25に示される移動検出用の光検出器280は、三種類の受光エリア群すなわち第一の受光エリア群282と第二の受光エリア群284と第三の受光エリア群286と、三種類の受光エリア群で得られる信号から四相の信号を作り出す信号処理回路290とを備えている。第一の受光エリア群282と第二の受光エリア群284と第三の受光エリア群286はスケールの移動方向に沿って交互に並んでいる。第一の受光エリア群282と第二の受光エリア群284と第三の受光エリア群286の各々は、それぞれ、一定のピッチp2で並ぶ四つの受光エリアを有している。隣接する二つの受光エリア群の隣接する二つの受光エリアは、p2/4×n(nは自然数)の間隔を有している。
【0110】
上述した第一〜第四の実施の形態は、いずれも反射型のリニアエンコーダーであるが、本発明の適用先はこれに限定されるものではなく、透過型のリニアエンコーダーに適用されてもよい。
【0111】
第五の実施の形態
第五の実施の形態は反射型の光学式ロータリーエンコーダーであり、これについて図26ないし図30を参照しながら説明する。
【0112】
図26に示されるように、本実施の形態の光学式ロータリーエンコーダー300は、移動検出のための光学系を含むエンコーダーヘッド302と、エンコーダーヘッド302に対して回転可能あるいは回動可能なロータリースケール304とを備えている。
【0113】
ロータリースケール304は、円形の光学的に透明な基板310の表面に形成された、スケール304の回転検出用の光学パターンあるいは回折格子パターン312を備えている。この回折格子パターン312は、図27に示されるように、放射状に配置された多数の扇形の反射部を有しており、反射部は、それと同じ大きさの扇形の隙間を置いて並んでいる。言い換えれば、同じ大きさの扇形の反射部と非反射部が円周に沿って交互に配置されており、反射部の面積と非反射部の面積の比は1:1である。
【0114】
また、ロータリースケール304は、図27に示されるように、透明基板310の中央部分すなわち回転中心近傍に、低反射領域314を備えている。別の言い方をすれば、スケール304は、光源から射出される光ビームの主軸近傍の部分が照射される部分に、反射率が低い領域あるいは反射率がほぼ0に等しい領域314を備えている。
【0115】
エンコーダーヘッド302は、可干渉な光を放射する光源すなわち可干渉光源322と、スケールの回転検出用の光検出手段あるいは光検出器324とを備えている。光検出器324は、複数の受光エリア330、別の言い方をすれば、フォトダイオード等の受光素子を備えている。これらの受光エリア330は、光源322を中心とする円周上に、一定の角度ピッチで並んでいる。
【0116】
例えば、可干渉光源322は例えば単体の面発光レーザーであり、光検出器324が半導体製造プロセスによって一体に形成された半導体基板320に、接着等の手段によって基板320に固定されている。つまり、光源322と光検出器324と326は、基板320に対してハイブリッドに設けられている。面発光レーザー322は平坦な基板320に固定されるので、その取り付けは容易に行なえる。
【0117】
エンコーダーヘッド302とロータリースケール304は、ロータリースケール304の回転軸とエンコーダーヘッド302から射出される光ビームの主軸328とがほぼ一致するように、一定の間隔を置いて互いに平行に配置されている。従って、面発光レーザー322から放射される光ビームは、スケール304の表面に実質的に垂直に照射される。すなわち、面発光レーザー322から射出される光ビームの主軸328は、ロータリースケール304に実質的に垂直である。
【0118】
エンコーダーヘッド302は、好ましくは、図5に示される構成が適用されている。すなわち、面発光レーザー322は、両面発光の面発光レーザーであり、エンコーダーヘッド302は、面発光レーザー322の下面から射出される光ビームを検出する受光部を更に備えており、この受光部からの出力に従って(図示しない)処理回路によって面発光レーザーから射出される光ビームの強度が制御される。
【0119】
また、ロータリースケール304の表面において、半径r1の円周342上に入射する光は、エンコーダーヘッド302の表面において、半径r2の円周344上に照射される。ここに、半径r1と半径r2は、r2=r1(z1+z2)/z1の関係を満たしており、z1は面発光レーザー322とスケール304の間隔、z2はスケール304と光検出器324の間隔である。
【0120】
エンコーダーヘッド302上の受光エリア330は、面発光レーザー322を略中心として、半径方向に比較的長い寸法を有している。好ましくは、光検出器324の受光エリア330は、ロータリースケール304回転中心から回折格子パターン312の内側までの距離rminと外側までの距離rmaxに対して、面発光レーザー322から、rmin(z1+z2)/z1とrmax(z1+z2)/z1の間に延びている。このような受光エリア330は、回折格子パターン312に入射する任意の光を検出し得る。受光エリア330は、この範囲を越えて延びていると更に好ましく、z1(=z2)が広がった場合でも回折格子パターン312に入射する任意の光を検出し得る。
【0121】
面発光レーザー322から射出された所定の広がりを有する光ビームは、ロータリースケール304に垂直に照射される。この光ビームの主軸近傍の一部は、ロータリースケール304の中心付近に形成された低反射領域314を照明し、その外側の一部は、低反射領域314の外側に位置する光学パターン312を照明する。
【0122】
低反射領域314を照明する部分の光ビームは、これによって吸収されるため、ほとんど面発光レーザー322に戻らない。その結果、面発光レーザー322から射出された光ビームがロータリースケール304の表面で反射されて面発光レーザー322に再入射することにより、光源の出力特性が不安定になるという不所望な現象の発生が防止される。別の言い方をすれば、面発光レーザー322とスケール304の間でいわゆる複合共振器が形成されることが防止される。その結果、面発光レーザー322から射出される光ビームが安定化される。
【0123】
前述したように、ロータリースケール304の回折格子パターン312は、図27に示されるように、放射状に配置された多数の扇形の反射部を有しているため、回折格子パターン312のピッチは、ロータリースケール304の半径方向で異なっている。つまり、回折格子パターン312上の任意の半径の円周上において、反射部と非反射部は同数であるため、回折格子パターンのピッチp1は、ロータリースケール304の半径方向に連続的に変化している。
【0124】
従って、光学パターン312を照明する部分の光ビームは、光学パターン312によって反射回折され、ピッチp1が式(1)をほぼ満足する範囲によって形成された回折干渉パターンが、光検出器324上に投影される。この回折干渉パターンは、放射状に延びる干渉縞を有している。言い換えれば、回折干渉パターンは、円周に沿って明暗パターンを有している。明暗パターンは、ロータリースケール304の回転に対応して回転する。
【0125】
図26において、面発光レーザー322の厚さが、面発光レーザー322とスケール304の間隔z1、スケール304と光検出器324の間隔z2に対して十分に小さいとすると、z1=z2と近似できるため、式(2)よりp2=2p1となり、エンコーダーヘッド302の受光面に投影される明暗パターンは、ロータリースケール304の回折格子パターンのピッチp1の約二倍のピッチp2を有する。
【0126】
エンコーダーヘッド302のいくつかの例が図28〜図30に示される。いずれのエンコーダーヘッド302も、受光エリア330は、第一の受光エリア群332と第二の受光エリア群334と第三の受光エリア群336と第四の受光エリア群338とを含んでおり、同じ受光エリア群の受光エリアは互いに電気的に接続されており、第一の受光エリア群332はA+信号を、第二の受光エリア群334はA-信号を、第三の受光エリア群336はB+信号を、第四の受光エリア群338はB-信号を出力する。
【0127】
これらの信号は(図示しない)信号処理回路によって処理され、A+信号とA-信号の減算によってA相信号が生成され、B+信号とB-信号の減算によってB相信号が生成される。信号処理回路は、例えば、光検出器324と同様に、半導体基板320に形成されるとよい。さらに、A相信号とB相信号から得られるサージュ図形に基づいて、スケールの回転量と回転方向が精度良く求められる。
【0128】
図28に示されるエンコーダーヘッド302では、第一の受光エリア群332と第二の受光エリア群334と第三の受光エリア群336と第四の受光エリア群338に含まれる受光エリアが、それぞれ円周上に順番に配列されている。このレイアウトによれば、A+信号とA-信号とB+信号とB-信号のいずれも全周にわたって検出されるため、外光がある場合や、スケール304の回折格子に欠陥や傷等があったり反射率等が不均一であったりする場合でも、安定した信号を検出できる。
【0129】
図29に示されるエンコーダーヘッド302では、同じ受光エリア群に属する受光エリアが隣接して配置されている。このレイアウトによれば、光検出器を小型化したり、電気配線を最小化したりすることができる。また、受光エリアの大きさを理想的とすることができ、信号強度等を十分に取ることができる。
【0130】
図30に示されるエンコーダーヘッド302では、同じ受光エリア群が更に三つの小群に分けられており、第一〜第四の受光エリア群の各小群が円周に沿って順番に配置されている。つまり、受光エリア群の小群がほぼ120度の角度間隔で配置されている。このレイアウトによれば、電気配線を複雑にすることなく、スケール304の回折格子の欠陥や傷、反射率等の不均一による影響を最小限とすることができる。
【0131】
本実施の形態においては、受検出器は、回折干渉パターンの四つの異なる位相を検出しているが、必要に応じて、一つのみの位相、あるいは、二つまたは三つの異なる位相を検出してもよく、また、それ以上の位相を検出してもよい。
【0132】
本実施の形態によれば、傷やごみ等の影響も受け難く、スケールと光源または光検出器の距離の調整も容易で、組み立て等に高価な部品や特殊な組み立てを必要としない、超小型高性能なロータリーエンコーダーが提供される。
【0133】
第六の実施の形態
第六の実施の形態は反射型の光学式ロータリーエンコーダーであり、これについて図31を参照しながら説明する。第六の実施の形態は、第五の実施の形態に類似しており、同じ参照符号で示される部材は同等の部材を意味し、その詳しい記述は以下の説明では省略する。
【0134】
図31に示されるように、本実施の形態の光学式ロータリーエンコーダー300は、移動検出のための光学系を含むエンコーダーヘッド302と、エンコーダーヘッド302に対して回転可能あるいは回動可能なロータリースケール304とを備えている。
【0135】
ロータリースケール304は、円形の光学的に透明な基板310の表面に形成された、スケール304の回転検出用の光学パターンあるいは回折格子パターン312を備えている。本実施の形態のロータリースケール304は、第五の実施の形態のロータリースケールとは異なり、図27に示されるような低反射領域314を回転中心近傍に備えていない。
【0136】
エンコーダーヘッド302は、可干渉な光を放射する光源すなわち可干渉光源322と、スケールの回転検出用の光検出手段あるいは光検出器324とを備えている。光検出器324は、光源322を中心とする円周上に、一定の角度ピッチで並んでいる複数の受光エリア330を備えている。
【0137】
例えば、可干渉光源322は例えば片面発光の単体の面発光レーザーであり、光検出器324が半導体製造プロセスによって一体に形成された半導体基板320に、接着等の手段によって基板320に固定されている。
【0138】
エンコーダーヘッド302とロータリースケール304は、ロータリースケール304の回転軸とエンコーダーヘッド302から射出される光ビームの主軸328とがほぼ一致するように、一定の間隔を置いて互いに平行に配置されている。
【0139】
ロータリーエンコーダー300は、さらに、面発光レーザー322から射出される光ビームの主軸上に、光ビームの偏光面あるいは偏波面を45度回転させる1/4波長板340を備えている。1/4波長板340は、面発光レーザー322から射出される光ビームの主軸上のどこに配置されてもよい。1/4波長板340は、例えば、面発光レーザー322の射出窓に取り付けられる。
【0140】
面発光レーザー322への再入射光は、1/4波長板340を二回通過しているため、面発光レーザー322から射出された直後の光の偏光面あるいは偏波面に対して、90度回転した偏光面あるいは偏波面を有している。このため、この再入射光は、射出直後の光と干渉することがなく、面発光レーザー322の射出光に影響を与えない。従って、面発光レーザー322からは、安定した光ビームが射出される。
【0141】
1/4波長板340は、スケール304の表面に設けれられてもよい。この場合、面発光レーザー322への戻り光の対策が成されていないエンコーダーにおいて、そのスケールを、1/4波長板340を備えたものに交換することによって、エンコーダーヘッドをそのまま流用しながらも、面発光レーザーへの戻り光の問題を解決することができる。
【0142】
本実施の形態によれば、エンコーダーヘッドのサイズや性能に影響を与えることなく、戻り光の影響を受けない安定な光源を有する光学式ロータリーエンコーダーが提供される。
【0143】
これまで、いくつかの実施の形態について図面を参照しながら具体的に説明したが、本発明は、上述した実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で行なわれるすべての実施を含む。
【0200】
【発明の効果】
本発明によれば、光源が光検出器と共にスケールに対して平行に配置された光学式エンコーダーが提供される。これにより、光源と光検出器を互いに近づけて配置できると共にその組み立ても容易に行なえる。結局、低価格で小型の光学式エンコーダーが提供される。
【図面の簡単な説明】
【図1】本発明の第一の実施の形態の光学式リニアエンコーダーの概略的な構成を示す斜視図である。
【図2】図1に示される移動検出用の光検出器の平面図である。
【図3】図1に示される基準位置検出用の光検出器の平面図である。
【図4】 (A)は移動検出用の光検出器で得られるA相信号とB相信号を示し、(B)はこのA相信号とB相信号に基づいて得られるリサージュ図形を示している。
【図5】第一の実施の形態の第一の変形例における光源とその取付部を示している。
【図6】第一の実施の形態の第二の変形例における可動スケールの構成を示している。
【図7】第一の実施の形態の第三の変形例における可動スケールの構成を示している。
【図8】図7に示される可動スケールに応じて用いられるエンコーダーヘッドの構成を示している。
【図9】第一の実施の形態の第四の変形例における可動スケールの構成を示している。
【図10】図9に示される可動スケールに応じて用いられるエンコーダーヘッドの構成を示している。
【図11】第一の実施の形態の第五の変形例における移動検出用の光検出器の構成を示している。
【図12】第一の実施の形態の第六の変形例における可動スケールの構成を示している。
【図13】本発明の第二の実施の形態の光学式リニアエンコーダーの概略的な構成を示す斜視図である。
【図14】本発明の第三の実施の形態の光学式リニアエンコーダーの概略的な構成を示す斜視図である。
【図15】本発明の第四の実施の形態の光学式リニアエンコーダーの概略的な構成を示す斜視図である。
【図16】図15に示される可動スケールの平面図である。
【図17】第四の実施の形態におけるエンコーダーヘッドの変形例を示している。
【図18】第四の実施の形態におけるエンコーダーヘッドの別の変形例を示している。
【図19】第一ないし第四の実施の形態に適用可能な可動スケールの構成を示している。
【図20】第一ないし第四の実施の形態に適用可能な別の可動スケールの構成を示している。
【図21】第一ないし第四の実施の形態に適用可能な他の可動スケールの構成を示している。
【図22】第一ないし第四の実施の形態に適用可能な更に別の可動スケールの構成を示している。
【図23】第一ないし第四の実施の形態に適用可能な移動検出用の光検出器の構成を示している。
【図24】第一ないし第四の実施の形態に適用可能な別の移動検出用の光検出器の構成を示している。
【図25】第一ないし第四の実施の形態に適用可能な他の移動検出用の光検出器の構成を示している。
【図26】本発明の第五の実施の形態の光学式ロータリーエンコーダーの概略的な構成を示す斜視図である。
【図27】図26に示されるロータリースケールの平面図である。
【図28】図26の光学式ロータリーエンコーダーに適用されるエンコーダーヘッドの平面図である。
【図29】図26の光学式ロータリーエンコーダーに適用される別のエンコーダーヘッドの平面図である。
【図30】図26の光学式ロータリーエンコーダーに適用される他のエンコーダーヘッドの平面図である。
【図31】本発明の第六の実施の形態の光学式ロータリーエンコーダーの概略的な構成を示す斜視図である。
【図32】第一の従来技術としての反射型の光学式エンコーダーを示している。
【図33】第二の従来技術としての透過型の光学式エンコーダーを示している。
【符号の説明】
100 光学式リニアエンコーダー
102 エンコーダーヘッド
104 可動スケール
110 基板
112 第一の光学パターン
114 第二の光学パターン
122 可干渉光源
124 第一の光検出器
126 第二の光検出器
Claims (18)
- 所定周期の光学パターンが形成された可動スケールと、上記光学パターン面に所定形状の光ビームを略垂直に照射する可干渉光源と、上記光学パターンで反射された上記光源からの光ビームを受光して、上記光学パターンによって受光面に生成された回折パターンを検出する光検出手段とを有し、
上記可干渉光源から上記光学パターンに至る光ビームの主軸の長さをz1、上記光学パターンから上記光検出手段の受光面に至る光ビームの主軸の長さをz2、上記光学パターンの所定部分のピッチをp1とすると、上記光検出手段の検出ピッチp2は、p2=p1・(z1+z2)/z1となることを特徴とする光学式エンコーダー。 - 同一の基板上に、上記光源と上記光検出手段がハイブリッドまたはモノリシックに設けられていることを特徴とする請求項1に記載の光学式エンコーダー。
- 上記光検出手段が形成された基板の上に、上記光源が取付けられていることを特徴とする請求項2に記載の光学式エンコーダー。
- 上記光検出手段は上記光ビームの主軸の光は受光しないように構成されていることを特徴とする請求項1に記載の光学式エンコーダー。
- 上記光学式エンコーダーは反射型であることを特徴とする請求項1に記載の光学式エンコーダー。
- 上記可動スケールには光ビームを反射して集光させる作用を有するホログラフィックパターンも形成されており、
上記ホログラフィックパターンは基準位置検出に用いられることを特徴とする請求項1に記載の光学式エンコーダー。 - 上記可動スケールには上記光学パターンが復数形成されており、上記複数の光学パターンは、スケールの移動方向に沿って一列に並んでおり、基準位置検出用の光学パターンを含んでいることを特徴とする請求項1に記載の光学式エンコーダー。
- 上記スケールの有する複数の光学パターンのうち少なくとも一つが、上記光源から射出された光ビームの所定の領域を、スケールの移動方向に対して集光性を有するシリンドリカル・ホログラムレンズであり、
上記光検出手段の、上記ホログラムレンズにより集光された光ビームを検出する受光エリアの少なくとも一つが、上記スケールの移動方向の幅が、p1(z1+z2)/z1より短いことを特徴とする請求項1に記載の光学式エンコーダー。 - 上記光検出手段は、同一の基坂上に形成された複数の受光エリアを含むことを特徴とする請求項1に記載の光学式エンコーダー。
- 上記スケールで反射された上記光ビームが上記光源に帰還するのを抑制する手段を有することを特徴とする請求項1に記載の光学式エンコーダー。
- 上記光ビームの主軸が上記スケール表面と交差する部分での上記スケール表面の反射率が、上記光学パターン部分よりも低いことを特徴とする請求項10に記載の光学式エンコーダー。
- 上記可干渉光源は面発光レーザーであることを特徴とする請求項1に記載の光学式エンコーダー。
- 上記可干渉光源は、上記光学パターンに向けて光ビームを射出する面とは反対側の面からも光ビームを射出するものであり、後者の光ビームを受光して強度を検出する強度検出手段と、上記強度検出手段の検出結果を用いて、上記可干渉光源の光ビーム強度を制御する手段とをさらに有することを特徴とする請求項1に記載の光学式エンコーダー。
- 回動の円周方向に所定周期の光学パターンが形成された回動可能なスケールと、
上記回動の回動軸上に位置し、上記スケールの回動中心近傍に、放射される光ビームの主軸が略垂直に入射し、上記光学パターン面に所定形状の光ビームを略垂直に照射する可干渉光源と、
上記光学パターンを経由した上記可干渉光源からの光ビームを受光して、上記光学パターンによって受光面に生成された回折パターンを検出する光検出手段とを有し、
上記スケールは、上記光学パターンを所定の半径r1の円周上に有し、上記可干渉光源と上記光学パターンとの間隔をz1、上記光学パターン面と上記光検出手段の受光エリアとの間隔をz2とすると、上記光検出手段の受光エリアは、半径r2=r1(z1+z2)/z1で決められる半径r2を有する円周上の上記所定周期位置に受光エリアを有する受光エリア群により構成されており、上記可干渉光源からの光ビームが照射される部分の、上記光学パターンのピッチをp1とすると、上記光検出手段の検出ピッチp2は、p2=p1・(z1+z2)/z1となることを特徴とする光学式エンコーダー。 - 上記光学式エンコーダーは反射型であることを特徴とする請求項14に記載の光学式エンコーダー。
- 上記スケールで反射された上記光ビームが上記光源に帰還するのを抑制する手段を有することを特徴とする請求項14に記載の光学式エンコーダー。
- 上記光ビームの主軸が上記スケール表面と交差する部分での上記スケール表面の反射率が、上記光学パターン部分よりも低いことを特徴とする請求項16に記載の光学式エンコーダー。
- 上記可干渉光源は、面発光レーザーであり、
上記面発光レーザーが、前方及び後方に光ビームを射出可能であり、上記光検出手段上の、上記面発光レーザーを配置する所定部分に光出力測定用受光エリアを設け、上記光源から前方に射出される光ビームを上記スケールに照射し、上記光源から後方に射出される光ビームを上記光検出手段上の光出力測定用受光エリアに入射可能に配置し、
上記光検出手段の有する上記光出力測定用受光エリアに入射する、上記面発光レーザーの後方に射出される光ビームの出力強度により、上記面発光レーザーの出力の制御を可能としたことを特徴とする請求項14に記載の光学式エンコーダー。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000233351A JP4981203B2 (ja) | 2000-08-01 | 2000-08-01 | 光学式エンコーダー |
| US09/850,499 US6713756B2 (en) | 2000-05-09 | 2001-05-07 | Optical encoder and optical rotary encoder |
| EP01111062A EP1154242A3 (en) | 2000-05-09 | 2001-05-08 | Optical encoder |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000233351A JP4981203B2 (ja) | 2000-08-01 | 2000-08-01 | 光学式エンコーダー |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002048602A JP2002048602A (ja) | 2002-02-15 |
| JP2002048602A5 JP2002048602A5 (ja) | 2007-09-13 |
| JP4981203B2 true JP4981203B2 (ja) | 2012-07-18 |
Family
ID=18725881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000233351A Expired - Lifetime JP4981203B2 (ja) | 2000-05-09 | 2000-08-01 | 光学式エンコーダー |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4981203B2 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3720751B2 (ja) | 2001-10-23 | 2005-11-30 | オリンパス株式会社 | 光学式エンコーダ |
| JP2004085529A (ja) * | 2002-06-25 | 2004-03-18 | Matsushita Electric Works Ltd | レーザー測距装置及び方法 |
| JP4658452B2 (ja) | 2003-02-07 | 2011-03-23 | オリンパス株式会社 | 光学式エンコーダ |
| DE602005002287T2 (de) | 2004-03-17 | 2008-05-29 | Canon K.K. | Optischer Encoder |
| WO2007043521A1 (ja) | 2005-10-13 | 2007-04-19 | Hamamatsu Photonics K.K. | エンコーダ及びエンコーダ用受光装置 |
| WO2008054879A1 (en) * | 2006-06-19 | 2008-05-08 | Gsi Group Corporation | Optical position transducer system and method employing reflected illumination |
| JP4890190B2 (ja) | 2006-10-10 | 2012-03-07 | 浜松ホトニクス株式会社 | エンコーダ |
| JP2008096205A (ja) * | 2006-10-10 | 2008-04-24 | Hamamatsu Photonics Kk | エンコーダ及びエンコーダ用受光装置 |
| JP2009182028A (ja) * | 2008-01-29 | 2009-08-13 | Nikon Corp | 受発光ユニット、光学式エンコーダ |
| DE102008044858A1 (de) * | 2008-08-28 | 2010-03-04 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| US20130148132A1 (en) * | 2010-08-19 | 2013-06-13 | Elesta Relays Gmbh | Sensor head holder |
| DE102011076055A1 (de) * | 2011-05-18 | 2012-11-22 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| JP6359340B2 (ja) * | 2014-05-27 | 2018-07-18 | 株式会社ミツトヨ | スケール及び光学式エンコーダ |
| JP2018040620A (ja) | 2016-09-06 | 2018-03-15 | 太陽誘電株式会社 | 変位計測装置及び変位計測方法 |
| JP6760831B2 (ja) * | 2016-12-06 | 2020-09-23 | Dmg森精機株式会社 | 変位検出装置 |
| GB2558667A (en) * | 2017-01-17 | 2018-07-18 | T Phy Ltd | Optical input devices |
| CN108731710A (zh) * | 2018-07-11 | 2018-11-02 | 上海市雷智电机有限公司 | 一种编码器 |
| CN112097711A (zh) * | 2020-10-21 | 2020-12-18 | 贵阳新天光电科技有限公司 | 一种高精度线纹标尺精度检测校准系统 |
-
2000
- 2000-08-01 JP JP2000233351A patent/JP4981203B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002048602A (ja) | 2002-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4981203B2 (ja) | 光学式エンコーダー | |
| JP4021382B2 (ja) | 光学式エンコーダ及びその製造方法並びに光学レンズモジュール | |
| US6713756B2 (en) | Optical encoder and optical rotary encoder | |
| JP3530573B2 (ja) | 光学式変位センサ | |
| JP3478567B2 (ja) | 回転情報検出装置 | |
| RU2471289C1 (ru) | Оптический кодер | |
| EP2294357A2 (en) | Laser self-mixing measuring device | |
| JPH02285214A (ja) | 測長器及びそれに用いるスケール部材 | |
| EP1286139B1 (en) | Light-emitting/receiving combined unit and displacement sensor using the same | |
| JP2005526951A (ja) | 基準点タルボットエンコーダ | |
| JP4812189B2 (ja) | 光学式検出装置 | |
| JP4020713B2 (ja) | 光学式エンコーダ | |
| US7705289B2 (en) | Scanning unit for an optical position-measuring device | |
| JPH08327401A (ja) | 変位情報検出装置、駆動制御装置、及び変位情報検出用スケール | |
| JP2003279383A (ja) | 光学式エンコーダ | |
| EP1614998B1 (en) | Sensor head of reflective optical encoder | |
| JP2001343256A (ja) | 光学式エンコーダ | |
| JP3544576B2 (ja) | 光学式エンコーダ | |
| JP3808192B2 (ja) | 移動量測定装置、及び移動量測定方法 | |
| WO2016143694A1 (ja) | 反射型エンコーダ | |
| JP2002139353A (ja) | 光学式ロータリエンコーダ | |
| JP4576013B2 (ja) | 光学式エンコーダ | |
| JP2004347465A (ja) | 光電式エンコーダ | |
| JP4008893B2 (ja) | エンコーダ | |
| JP2004069654A (ja) | 光学式エンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070730 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070730 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110208 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120417 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120420 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150427 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4981203 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |