JP4020713B2 - 光学式エンコーダ - Google Patents
光学式エンコーダ Download PDFInfo
- Publication number
- JP4020713B2 JP4020713B2 JP2002188554A JP2002188554A JP4020713B2 JP 4020713 B2 JP4020713 B2 JP 4020713B2 JP 2002188554 A JP2002188554 A JP 2002188554A JP 2002188554 A JP2002188554 A JP 2002188554A JP 4020713 B2 JP4020713 B2 JP 4020713B2
- Authority
- JP
- Japan
- Prior art keywords
- optical pattern
- scale
- pattern
- phase
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Optical Transform (AREA)
Description
【発明の属する技術分野】
本発明は光学式エンコーダに係り、特に、光学的手段を用いて周期的な信号を検出することにより、光源とスケールの相対的な変位を検出する変位センサやサーボモータに適用可能な光学式エンコーダに関する。
【0002】
【従来の技術】
一般に、工作機械や精密測定機器等においては、相対変位する2つの部材の位置を目標位置に一致させるために、この2つの部材間の変位量を検出して、その検出結果に基づいて制御を行うサーボ機構が設けられている。
【0003】
現在、このようなサーボ機構としては、サーボモータ、特に、交流サーボモータが主流になりつつある。
【0004】
ところで、交流サーボモータを制御するには、通常の位置、及び速度を制御するための、90度位相差を有する2相信号、いわゆるA相、B相信号と、モータの磁極を制御するための120度位相差を有する3相信号、いわゆるU相、V相、W相信号が用いられている。
【0005】
ここで、AB相信号は比較的短い周期の信号であり、一方、UVW相信号は、AB相信号に比べて長い周期を有する信号となっている。
【0006】
例えば、回転制御を行うロータリ型の交流サーボモータの場合、一般的なAB相信号は、数100〜数1000周期/回転であるのに対し、一般的なUVW相信号は、2〜数周期/回転と、大きく異なっている。
【0007】
このため、従来は、図13に示すように、モータの回転軸に支持されたAB相信号用を検出するためのスケール20と光源10と光検出器30からなるセンサ1組と、UVW相を検出するためのスケール40と光検出器50からなるセンサ1組との、都合2組のスケールとセンサとを用いて制御を行う必要があった。
【0008】
従って、従来のサーボモータの構成では、AB相用とUVW相用の2組のスケールとセンサとを用いているため、部品点数も多く、調整や組立のコストの増大を招いており、また、モータ部に対してセンサ部が大きいなどの問題点を有している。
【0009】
このような問題点を解決するために、例えば、特開平10−132605公報には、図14に示すように、一つの周期パターンを有するスケールと、これを検出するためのセンサ部一組と、このセンサからの出力信号を異なる周期に内挿するための二つの内挿手段を用いる位置検出装置が記載されている。
【0010】
【発明が解決しようとする課題】
しかしながら、特開平10−132605公報に開示されている従来の位置検出装置には、以下に示すような多くの問題点が存在する。
【0011】
すなわち、上記二つの内挿手段を用いる位置検出装置では、スケールパターンの周期をより粗いUVW相信号の周期とする必要があるので、AB相信号についてはこの粗い信号を内挿、分割して生成するため、高い分解能を実現することが困難であるという問題がある。
【0012】
また、この場合、無理に分割数を大きくして見かけ上高い分解能を実現したとしても、大きな誤差を含んだものとなり、高い精度が要求される工作機械や精密測定器等に用いることができないという点で問題となる。
【0013】
さらに、上記の方法では、信号処理が複雑なものとなり、制御系が複雑化するばかりでなく、装置の大型化、高価格化は避けられという問題がある
本発明は、上記の事情に鑑みてなされたもので、AB相信号を高分解能に出力可能で、しかも部品点数を少なくし、組立なども容易に行えることにより、小型で低価格な光学式エンコーダを提供することを目的としている。
【0014】
【課題を解決するための手段】
本発明によると、一つのスケール上に反射型光学パターンと透過型光学パターンまたは、反射型光学パターンと磁気周期パターンを形成することにより、高分解能なAB相出力と、制御しようとするモータに適したUVW相信号を出力することを可能とし、その結果、高分解能で、且つモータ制御可能であり、さらに部品点数が少なく小型化、低価格化が容易な光学式エンコーダを提供することが可能となる。
【0015】
さらに、本発明によると、AB相用周期パターンとUVW相用周期パターンとを同一トラック上に形成することにより、ロータリ型センサの場合にはそのスケール最外径を、リニア型センサの場合にはそのスケール幅をより小型化した光学式エンコーダを提供することが可能となる。
【0016】
具体的には、本発明によると、上記課題を解決するために、
(1) 光源と、前記光源に対して相対的に移動し、所定ピッチの周期的な光学パターンが形成されたスケールと、前記光源から出射された光ビームによる前記スケールの光学パターンからの反射光または透過光を受光する光検出器とを備える光学式エンコーダにおいて、
前記スケールが、少なくとも一つの反射型の光学パターンと、少なくとも一つの透過型の光学パターンとを有し、かつ、前記反射型の光学パターンの形成されたトラックと、前記透過型の光学パターンの形成されたトラックとが重なりを有し、前記反射型の光学パターンの有するピッチをPrとし、前記透過型の光学パターンの有するピッチをPtとしたとき、Pt>Prなる関係を有しており、
前記光検出器が、前記スケールの反射型の光学パターンからの反射光を受光する第1の光検出器と、前記スケールの透過型の光学パターンからの透過光を受光する第2の光検出器とを有することを特徴とする、光学式エンコーダが提供される。
【0017】
また、本発明によると、上記課題を解決するために、
(2) 前記反射型の光学パターンの有するピッチをPrとし、前記透過型の光学パターンの有するピッチをPtとしたとき、Pt>10×Prなる関係を有していることを特徴とする(1)に記載の光学式エンコーダが提供される。
【0018】
また、本発明によると、上記課題を解決するために、
(3) 前記スケールの反射型の光学パターンのトラック幅をWrとし、前記スケールの透過型の光学パターンのトラック幅をWtとしたとき、Wt≧Wrなる関係を有していることを特徴とする(1)又は(2)に記載の光学式エンコーダが提供される。
【0030】
【発明の実施の形態】
以下図面を参照して本発明の実施の形態について説明する。
【0031】
(第1の実施の形態)
本発明の第1の実施の形態による光学式エンコーダついて、図1乃至図3を参照して説明する。
【0032】
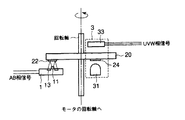
図1は、本発明の第1の実施の形態による光学式エンコーダの構成を示す側面図である。
【0033】
すなわち、図1に示す光学式エンコーダは、変位センサやサーボモータに適用可能であって、移動量や移動速度を検出するための90度の位相差を有する2つの信号である、A相信号とB相信号を検出して出力するための反射型のセンサヘッド1と、図示しないサーボモータの磁極の位置に同期した120度位相差を有する3つの信号、U相信号、V相信号、W相信号を検出して出力するための透過型センサヘッド3と、二つのセンサヘッド1及び3に対応した光学パターンが形成された一つのスケール20により構成されている。
【0034】
ここで、スケール20は、図示しないサーボモータ本体の回転軸に支持され、モータの回転軸の回転に伴って回転する。
【0035】
また、反射型のセンサヘッド1には、光源11と、光検出器13とが形成されている。
【0036】
そして、光源11から出射した光ビームは、スケール20上に形成された反射型の光学パターン22によって反射され、この反射光が光検出器13で検出される。
【0037】
この場合、スケール20上に形成された反射型の光学パターン22は、スケール20の回転方向に周期的に反射部と非反射部を有しており、スケール20の回転に伴って、反射型のセンサヘッド1は90度位相差を有する二つの信号である、A相信号とB相信号を出力するように構成されている。
【0038】
また、モータを制御するため、モータの磁極の位置と同期した、U相、V相、W相の120度位相差の3相の信号を検出して出力する透過型センサヘッド3は、光源31と光検出器33を有している。
【0039】
そして、光源31から出射した光ビームは、スケール20上に形成された透過型の光学パターン24によって変調され、この透過型の光学パターン24に応じた光ビームが光検出器33に入射されるようになっている。
【0040】
ここで、スケール20上に形成された透過型の光学パターン24は、制御しようとするモータの磁極の位置と対応するように配置されており、この結果、光検出器33からは120度位相差を有し、モータの磁極の位置に対応した3相の信号である、U相、V相、W相の各信号が出力されるように構成されている。
【0041】
図2は、スケール20に形成される、AB相用光学パターンとしての反射型の光学パターン22と、UVW相用光学パターンとしての透過型の光学パターン24とを示す下面図である。
【0042】
すなわち、図2に示されるように、スケール20には、AB相用光学パターンとしての反射型の光学パターン22が外周部に所定のピッチで形成されていると共に、UVW相用光学パターンとしての透過型の光学パターン24が内周部に所定の間隔で形成されている。
【0043】
図3は、スケール20の側断面である。
【0044】
すなわち、このスケール20の断面は、図3に示されるように構成されており、ガラス等の透明な部材からなる基材26の表面にAB相用光学パターンとしての反射型の光学パターン22と、UVW相用光学パターンとしての透過型の光学パターン24が後述するコーティング部材により形成されている。
【0045】
ここで、AB相用光学パターンとしての反射型の光学パターン22は、反射型のパターンであるため、その反射部分にクロムなど所定の反射率を有するコーティング部材によりパターニングして形成することが可能である。
【0046】
また、UVW相用光学パターンとしての透過型の光学パターン24は、透過型のパターンであるため、その非透過部分にクロム等の他に、黒色の樹脂や金属酸化物などのコーティング部材も使用することが可能である。
【0047】
本実施の形態では、AB相用光学パターンとしての反射型の光学パターン22も、UVW相用光学パターンとしての透過型の光学パターン24もガラス部材26の表面にクロム膜を図2に示すようにパターニングしたものを用いている。
【0048】
図1に戻って説明を続けると、光源11から反射型の光学パターン22に光ビームが照射されると、この光ビームは反射型の光学パターン22により変調され、複数の受光素子からなる光検出器13上に、この反射型の光学パターン22に応じて周期的に光強度が変化する光強度パターンが投影される。
【0049】
すなわち、光検出器13には、この光強度パターンの二つ以上の位相を検出するための、複数の受光素子が光強度パターンの周期に応じて配置されている。
【0050】
そして、光検出器13は、この受光した光強度パターンから、互いに90度位相差を有する二つの信号として、いわゆるAB相信号を出力するように構成されている。
【0051】
また、透過型のセンサヘッド3の光源31から出射された光ビームは、スケール20上に形成された透過型の光学パターン24に照射され、この透過型の光学パターン24により、透過するかまたは遮られ、光検出器33には透過型の光学パターン24に応じた光ビームが入射される。
【0052】
ここで、光検出器33は、120度位相差をもって同一トラック上に3個配置されており、120度位相差を有する3相信号である、U、V、W相信号を検出して出力可能なように構成されている。
【0053】
以上のように構成することにより、本発明の第1の実施の形態によれば、1枚のスケール20で、AB相信号とUVW相信号を検出して、出力可能な光学式エンコーダを実現することが可能となり、より小型で部品点数の少ない光学式エンコーダと、それを用いたサーボモータを提供することが可能となる。
【0054】
(第2の実施の形態)
次に、本発明の第2の実施の形態による光学式エンコーダについて、図4乃至図6を用いて説明する。
【0055】
本発明の第2の実施の形態による光学式エンコーダにおいて、その基本的な構成は、上述した第1の実施の形態と同様に構成されており、基本的な動作についても、第1の実施の形態と同様であるため、以下では、主に、第1の実施の形態との相違点について説明する。
【0056】
図4は、第2の実施の形態において、スケール20上の同一のトラック上に重ねて形成される、AB相用光学パターンとしての反射型の光学パターン22と、UVW相用光学パターンとしての透過型の光学パターン24とを示す下面図である。
【0057】
すなわち、この第2の実施の形態においては、第1の実施の形態の説明図である図1において、スケール20上の外周部に形成されたAB相用の反射型の光学パターン22とスケール20上の内周部に形成されたUVW相用の透過型の光学パターン24とが、図4に示されるように、スケール20上の同一のトラック上に重ねて構成されている点で異なっている。
【0058】
このため、第2の実施の形態による光学式エンコーダにおいては、AB相信号を検出するための反射型のセンサヘッド1と、UVW相信号を検出するための透過型のセンサヘッド3とをスケール20上の同一トラック上に配置することが可能となるので、スケール20の半径を、第1の実施の形態と比較してより小型化することが可能となる。
【0059】
すなわち、この第2の実施の形態による光学式エンコーダは、第1の実施の形態による光学式エンコーダの機能を損なうことなく、より小型化した光学式エンコーダを提供することが可能となる。
【0060】
図5の(a)は、本実施の形態によるスケール20の断面図である。
【0061】
すなわち、このスケール20は、図5の(a)の断面図に示すように、まず、ガラスなど透明な部材からなる基材26の表面における所定のトラック上に所定のピッチで、UVW相用光学パターンとしての透過型の光学パターン24をコーティング部材によりパターニングして形成する。
【0062】
このUVW相用光学パターンとしての透過型の光学パターン24は、光を遮り、且つ反射率が後述するAB相用光学パターンとしての反射型の光学パターン22よりも小さいものであればコーティング部材として何を用いてもかまわない。
【0063】
例えば、コーティング部材としては、黒色の樹脂やアルマイトなど光を遮り、表面の反射率が低いものであれば何でもよく、さらには、表面の反射率は、スケール20の基材26であるガラス等透明な部材の表面反射率と近いコーティング部材であることが望ましい。
【0064】
この、UVW相用光学パターンとしての透過型の光学パターン24上には、AB相用光学パターンとしての反射型の光学パターン22が形成されている。
【0065】
このAB相用光学パターンとしての反射型の光学パターン22は、一般にアルミニウムやクロムなど、スケール20の基材26と比較して高い反射率を有するものなら何でもコーティング部材として使用することが可能であり、特に、コーティング部材としての金属膜をエッチングなどによりパターニングしたものを用いれば、容易で安価に作製することが可能である。
【0066】
なお、図5の(b)に示すように、反射型の光学パターン22と透過型の光学パターン24がそれぞれスケール20の基材26の異なる面上に形成されたスケールを用いることも可能である。
【0067】
すなわち、図5の(b)は、この第2の実施の形態の変形例によるスケール20の断面図である。
【0068】
次に、以上のような第2の実施の形態の光学式エンコーダの動作について、図6に示される構成に基づいて説明する。
【0069】
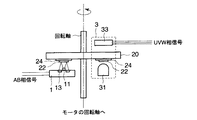
図6は、本発明の第2の実施の形態による光学式エンコーダの構成を示す側面図である。
【0070】
まず、図6に示すように、反射型のセンサヘッド1の光源11から出射された光りビームは、第1の実施の形態の場合と同様にスケール20上に形成されているAB相用光学パターンとしての反射型の光学パターン22により変調され、その反射光が光検出器13により検出される。
【0071】
一方、透過型のセンサヘッド3の光源31から出射された光ビームは、スケール20上のAB相用光学パターンとしての反射型の光学パターン22を通過し、UVW相用光学パターンとしての透過型の光学パターン24に入射される。
【0072】
そして、光源31から出射した光ビームが、スケール20上でAB相用光学パターンとしての反射型の光学パターン22の下部に形成されたUVW相用光学パターンとしての透過型の光学パターン24の透過部に入射した場合、光ビームはAB相用光学パターンとしての反射型の光学パターン22により変調されたのちUVW相用光学パターンとしての透過型の光学パターン24を透過し、光検出器33により検出される。
【0073】
一方、この光ビームがUVW相用光学パターンとしての透過型の光学パターン24の遮光部に入射した場合、光ビームはこの遮光部に遮られ、光検出器33ではその光ビームが検出されない。
【0074】
つまり、スケール20の同一トラック上に二つのパターンを重ねて形成した場合でも、それぞれAB相とUVW相信号を独立に検出することが可能となる。
【0075】
ここで、透過型のセンサヘッド3の光検出器33に検出されるUVW信号は、AB相パターンを通過した光ビームを検出することになる。
【0076】
この場合、一般に、AB相用光学パターンとしての反射型の光学パターン22の周期に比べてUVW相用光学パターンとしての透過型の光学パターン24の周期は十分に大きい。
【0077】
このため、光検出器33の受光部の、スケール移動方向の長さをAB相用光学パターンとしての反射型の光学パターン22により変調された光強度パターンの周期の整数倍の大きさとするなどAB相用光学パターンとしての反射型の光学パターン22の周期に応じた大きさとすることにより、AB相用光学パターンとしての反射型の光学パターン22による影響を除去することが可能である。
【0078】
また、AB相用光学パターンとしての反射型の光学パターン22により形成される光強度パターンが、光検出器33の受光部に十分な周期数入射するように、十分に大きくすることによっても、AB相用光学パターンとしての反射型の光学パターン22による影響を除去することが可能である。
【0079】
さらには、受光素子の位置をスケールから遠ざける等、スケール20と受光素子33間の距離を大きくすることで、光強度パターンが結像しないように光検出器33を配置するなどの方法によっても、AB相用光学パターンとしての反射型の光学パターン22による影響を除去することが可能である。
【0080】
なお、AB相用光学パターンとしての反射型の光学パターン22のピッチPrは、UVW相用光学パターンとしての透過型の光学パターン24のピッチPtと比較して、Pt>Prなる関係を有することが望ましく、さらにPt>10×Prなる関係を有するようにすれば、より効果的である。
【0081】
また、反射型の光学パターンと磁気パターンとを同一のスケール上に形成した場合においても、反射型の光学パターンのピッチPrと磁気パターンピッチPmとが、Pm>Prなる関係を有することが望ましく、さらにPm>10×Prなる関係を有するようにすれば、より効果的である。
【0082】
以上のように構成することにより、本発明の第2の実施の形態によれば、1枚のスケールを用いると共に、そのスケールの大きさをより小型化することが可能となり、より小型の光学式エンコーダ及びそれを用いたサーボモータを提供することが可能となる。
【0083】
(第3の実施の形態)
次に、本発明の第3の実施の形態による光学式エンコーダについて、図7を用いて説明する。
【0084】
本実施の形態においては、その基本的な構成が、上述した第2の実施の形態と同様に構成されており、基本的な動作についても第2の実施の形態と同様であるため、以下では、主に、第2の実施の形態との相違点について説明する。
【0085】
図7は、本実施の形態において、スケール20上の同一のトラック上に重ねて形成されるAB相用光学パターンとしての反射型の光学パターン22と、UVW相用光学パターンとしての透過型の光学パターン24とを示す下面図である。
【0086】
すなわち、図7に示すように、この第3の実施の形態では、同一トラック上に形成された、AB相用光学パターンとしての反射型の光学パターン22の幅Wrと、UVW相用光学パターンとしての透過型の光学パターン24の幅Wtが、図7に示されるように、Wt≧Wrなる関係を有するように構成されている。
【0087】
このように構成することにより、AB相用としての反射型のセンサヘッド1と比べてUVW相用としての透過型のセンサヘッド3を、スケール20の半径方向について取付余裕度を大きくすることが可能となる。
【0088】
以上のように構成することにより、本発明の第3の実施の形態によれば、AB相用センサヘッド1に比べてUVW相用センサヘッド3の取付余裕度を大きくすることが可能となり、製造、組立コストをより低減した小型の光学式エンコーダおよびそれを用いたサーボモータを提供することが可能となる。
【0089】
なお、反射型の光学パターンと磁気パターンとを同一のスケール上に形成した場合においても、反射型の光学パターンの幅Wrと磁気パターンの幅Wmとが、Wm≧Wrなる関係を有するように構成することで、同様の効果を得ることができる。
【0090】
(第4の実施の形態)
次に、本発明の第4の実施の形態による光学式エンコーダについて、図8を用いて説明する。
【0091】
本実施の形態においては、その基本的な構成が、上述した第1及び第2の実施の形態と同様に構成されており、基本的な動作についてもこの第1及び第2の実施の形態と同様であるため、以下では、主に、これらの実施の形態との相違点について説明する。
【0092】
図8は、本発明の第4の実施の形態による光学式エンコーダの主要部の構成を示す側面図である。
【0093】
すなわち、図8に示すように、本実施の形態では、AB相信号を検出して出力するための反射型のセンサヘッド1の光源11と、スケール20と、光検出器13とが、図示されてるようなタルボットイメージを形成して、それを検出し得るような位置関係として配置されている。
【0094】
以下、タルボットイメージについて説明する。
【0095】
図8に示される、各構成パラメータを以下のように定義する。
【0096】
z1:光源11と、スケール20上の回折格子パターンを形成した面の間隔
z2:スケール20上の回折格子パターンを形成した面と、光検出器の受光面との間隔
p1:スケール20上の回折格子パターンのピッチ
p2:光検出器13の受光面上に形成される、回折干渉パターン、すなわちタルボットイメージのピッチ
ここで、上記パラメータが、以下の(1)式に示す関係を満たすような特定の関係にあるときには、スケール20の回折格子パターンと相似な強度パターンが光検出器13の受光面上に生成される。
【0097】
(1/z1)+(1/z2)=λ/(k(p1)2 ) …(1)
ここで、λは光源から出射される光ビームの波長、kは自然数である。
【0098】
この光検出器13の受光面上に生成される、スケール20の回折格子パターンと相似な強度パターンはタルボットイメージと呼ばれるもので、上記関係式を満たす条件で出現し、この効果をタルボット効果という。
【0099】
このとき、光検出器33の受光面上の回折干渉パターンのピッチp2は他の構成パラメータを用いて、以下の(2)式に示すように表すことができる。
【0100】
p2=p1(z1+z2)/z1 …(2)
前記光源11に対して前記スケール20が回折格子のピッチ方向に変位すると、同じ空間周期を保った状態で回折干渉パターンの強度分布がスケールの変位する方向に移動する。
【0101】
従って、光検出器33上に形成される受光エリア35の空間周期p20をp2と同じ値に設定すれば、スケール20がピッチ方向にp1だけ移動する毎に光検出器33から周期的な強度信号が得られることにより、スケール20のピッチ方向の変位量を検出することができる。
【0102】
本実施の形態では、図8に示される、光源11は可干渉光源であり、例えば、面発光レーザが用いられているものとする。
【0103】
この光源11は光検出器33上に配置されており、光源11から出射される光ビームはスケール20に対して略垂直に入射し、そのスケール20からの反射光が光検出器13上に形成された受光エリア15に入射する。
【0104】
このとき、上記に示したパラメータである、z1、z2、p1、p20、λは、上記式(1)に示されるような、タルボットイメージを形成して、検出可能なように構成されているため、このイメージを検出することで、スケール20の移動に応じた、90度位相差を有するAB相信号を出力することが可能となる。
【0105】
本実施の形態のように構成されることにより、センサヘッド1を、特に、小型で、且つ高分解能に構成することが可能となるため、より小型で高性能な光学式エンコーダおよびそれを用いたサーボモータを提供することが可能となる。
【0106】
なお、本実施の形態では、光源11として面発光レーザを用いたが、これにとらわれることなく、LEDやSLDなどの可干渉光源であれば何を用いてもかまわない。
【0107】
また、本実施の形態では、スケール20は、図5に示されるような光学式スケールであっても、また、図10に示されるような、磁気スケールの表面に光学パターンを配置したものであってもかまわない。
【0108】
また、本実施の形態では、タルボットイメージを形成して、検出可能なように構成されているのが、反射型のセンサヘッド1である場合について説明したが、透過型のセンサヘッドである場合にも適用することができる。
【0109】
(第5の実施の形態)
次に、本発明の第5の実施の形態による光学式エンコーダについて図9乃至図11を用いて説明する。
【0110】
本実施の形態においては、その基本的な構成が、上述した第2の実施の形態と同様に構成されており、基本的な動作についても、第2の実施の形態と同様であるため、以下では、主に、第2の実施の形態との相違点について説明する。
【0111】
図9は、本発明の第5の実施の形態による光学式エンコーダの構成を示す側面図である。
【0112】
すなわち、この第5の実施の形態においては、図9に示されるように、AB相信号を検出するための光学式センサヘッド1と、UVW相を検出するための磁気式センサヘッド5とにより、一つのスケール20から、90度位相差のAB相信号と120度位相差のUVW相信号を検出するように構成されている。
【0113】
図10は、第5の実施の形態によるスケール20の側断面図である。
【0114】
すなわち、スケール20は、図10に示されるような断面構造を有しており、スケール20の基材28は、磁化可能な部材である。
【0115】
図11は、このようなスケール20の基材28に形成される磁気パターンN,Sと、反射型の光学パターン22とを示す下面図である。
【0116】
すなわち、スケール20の基材28の表面には、図11に示されるような磁気パターンN,Sが90度おきに形成されていると共に、この磁気パターンN,Sの上に重ねた状態で反射型の光学パターン22が形成されている。
【0117】
そして、磁気センサヘッド5は、例えば、ホール素子などであり、これにより、スケール20の磁気パターンN,Sを検出するように構成されている。
【0118】
このように構成することより、本発明の第5の実施の形態によれば、より小型で低価格な光学式エンコーダと、それを用いたサーボモータを提供することが可能となる。
【0119】
なお、以上に示した全ての実施の形態を説明するに当たり、スケール20には、AB相用光学パターンとしての反射型の光学パターン22が形成されていると共に、UVW相用光学パターンとしての透過型の光学パターン24が形成されているとしたが、反射型の光学パターン22からの反射光及び透過型の光学パターン24からの透過光を、それぞれ、またはその一方を回折光として受光する構成とすることもできる。
【0120】
従って、本発明でいう反射光及び透過光の概念には、それらの回折光が含まれているものとする。
【0121】
また、以上に示した全ての実施の形態を説明するに当たり、120度位相差のUVW相を検出するセンサヘッド3は、図1、図6などに示されるように、簡単のため一つのみを記載し、UVWの3相の出力信号を出力すると記載したが、実際には、図12に示されるように、UVWの3相の出力信号を出力するために、3個のセンサヘッド3−U、3−V、3−Wが配置されている。
【0122】
図12は、スケール20の同一円周上に120度の位相差を持って3個のセンサヘッド3−U、3−V、3−Wが配置されている構成を示す図である。
【0123】
すなわち、図12に示されるように、スケール20に形成されるAB相用光学パターンとしての反射型の光学パターン22、透過型の光学パターン24と対応する同一円周上に、UVWの3相の出力信号を出力するために、120度の位相差を持って3個のセンサヘッド3−U、3−V、3−Wが配置されている。
【0124】
また、図9に示される磁気式センサヘッド5の場合も、上述したUVW相を検出するセンサヘッド3の場合と同様に120度位相差を有するように3個の磁気式センサヘッドが配置されるのが普通である。
【0125】
また、各実施の形態においては、ロータリ型の光学式エンコーダ及び回転型のモータについて説明したが、直線方向に移動するリニア型の光学式エンコーダ及びリニア型のサーボモータに適応可能なことは言うまでもない。
【0126】
本発明は、発明の要旨を逸脱しない範囲内に置いて種々多くの変形や修整が可能であり、上に説明した各実施の形態はその例に過ぎない。
【0127】
なお、本発明の要旨は以下のようにまとめることができる。
【0128】
1. 光源と、前記光源に対して相対的に移動し、所定ピッチの周期的な光学パターンが形成されたスケールと、前記可干渉光源から出射された光ビームによる、前記光学パターンからの反射光または透過光を受光する光検出器を備える光学式エンコーダにおいて、
前記スケールが、少なくとも一つの反射型光学パターンと、少なくとも一つの透過型の光学パターンとを有し、
前記光検出器が、前記スケールの反射型の光学パターンからの反射光を受光する第1の光検出器と、前記スケールの透過型の光学パターンからの反射光を受光する第2の光検出器とを有することを特徴とする、光学式エンコーダ。
【0129】
上記のように構成することにより、複数のセンサを用いて一つのスケールから複数の情報を検出することが可能となるため、より小型で低価格な光学式エンコーダおよびそれを用いたサーボモータを提供することが可能となる。
【0130】
なお、上記1.の光学式エンコーダの詳細については、第1の実施の形態において述べられている。
【0131】
2. 前記反射型の光学パターンの形成されたトラックと、前記透過型の光学パターンの形成されたトラックとが重なりを有することを特徴とする1.に記載の光学式エンコーダ。
【0132】
このように構成することにより、同一トラックから、情報を検出することが可能となるため、より小型で低価格な光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0133】
なお、上記2.の光学式エンコーダの詳細については、第2の実施の形態において述べられている。
【0134】
3. 前記反射型の光学パターンの有するピッチをPrとし、前記透過型の光学パターンの有するピッチをPtとしたとき、Pt>Prなる関係を有していることを特徴とする2.に記載の光学式エンコーダ。
【0135】
このように構成することにより、反射型の光学パターンの影響を受けることなく、透過型の光学パターンの情報を検出する光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0136】
なお、上記3.の光学式エンコーダの詳細については、第2の実施の形態において述べられている。
【0137】
4. 前記反射型の光学パターンのトラック幅をWrとし、透過型の光学パターンのトラック幅をWtとしたとき、Wt≧Wrなる関係を有していることを特徴とする2.に記載の光学式エンコーダ。
【0138】
このように構成することにより、反射型の光学パターンの情報を検出するためのセンサヘッドよりも、透過型の光学パターンの情報を検出するためのセンサヘッドの取付許容度を大きくすることが可能となるため、その組立作業において、効率的な組立が可能となる。
【0139】
なお、上記4.の光学式エンコーダの詳細については、第3の実施の形態において述べられている。
【0140】
5. 前記光源が可干渉光源であり、前記可干渉光源と、前記スケールと、前記光検出器とが、該可干渉光源から出射された光ビームによる前記周期的な光学パターンとしてタルボットイメージを形成、検出可能に配置され、前記第1及び第2の光検出器の少なくとも一方が、該タルボットイメージを検出可能に配置されていることを特徴とする2.に記載の光学式エンコーダ。
【0141】
このように構成することにより、反射型の光学パターンの情報を検出するためのセンサヘッドをより小型、高性能化することが可能となるため、より小型で高性能な光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0142】
なお、上記5.の光学式エンコーダの詳細については、第4の実施の形態において述べられている。
【0143】
6. 光源と、前記光源に対して相対的に移動し、所定ピッチの周期的な光学パターンが形成されたスケールと、前記可干渉光源から出射された光ビームによる、前記光学パターンからの反射光または透過光を受光する光検出器とを備える光学式エンコーダにおいて、
前記スケールが、少なくとも一つの反射型の光学パターンと、少なくとも一つの、磁気的特性が周期的に変化する磁気パターンとを有し、
前記光検出器が、前記スケールの前記反射型の光学パターンからの反射光を受光し、
前記スケールの磁気パターンの周期的変化を検出する磁気検出器をさらに有することを特徴とする光学式エンコーダ。
【0144】
このように構成することにより、より小型で低価格なエンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0145】
なお、上記6.の光学式エンコーダの詳細については、第5の実施の形態において述べられている。
【0146】
7. 前記光学パターンの形成されたトラックと、前記磁気パターンの形成されたトラックとが重なりを有することを特徴とする6.に記載の光学式エンコーダ。
【0147】
このように構成することにより、さらに小型で高性能な光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0148】
なお、上記7.の光学式エンコーダの詳細については、第5の実施の形態において述べられている。
【0149】
8. 前記スケールの反射型の光学パターンの有するピッチをPrとし、前記スケールの磁気パターンのピッチPmとしたとき、Pm>Prなる関係を有していることを特徴とする7.に記載の光学式エンコーダ。
【0150】
このように構成することにより、反射型の光学パターンの影響を受けることなく、磁気パターンの情報を検出する光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0151】
なお、上記8.の光学式エンコーダの詳細については、第2の実施の形態において述べられている。
【0152】
9. 前記スケールの反射型の光学パターンのトラック幅をWrとし、前記スケールの磁気パターンのトラック幅をWmとしたとき、Wm≧Wrなる関係を有していることを特徴とする7.に記載の光学式エンコーダ。
【0153】
このように構成することにより、反射型の光学パターンの情報を検出するためのセンサヘッドよりも、磁気パターンの情報を検出するためのセンサヘッドの取付許容度を大きくすることが可能となるため、その組立作業において、効率的な組立が可能となる。
【0154】
なお、上記9.の光学式エンコーダの詳細については、第3の実施の形態において述べられている。
【0155】
10. 前記光源が可干渉光源であり、前記可干渉光源と、前記スケールと、前記光検出器とが、該可干渉光源から出射された光ビームによる前記周期的な光学パターンとしてタルボットイメージを形成、検出可能に配置され、前記光検出器が、該タルボットイメージを検出可能に配置されていることを特徴とする6.または7.に記載の光学式エンコーダ。
【0156】
このように構成することにより、反射型の光学パターンの情報を検出するためのセンサヘッドをより小型、高性能化することが可能となるため、より小型で高性能な光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0157】
なお、上記10.の光学式エンコーダの詳細については、第4の実施の形態において述べられている。
【0158】
11. 光源と、前記光源に対して相対的に移動し、所定ピッチの周期的な光学パターンが形成されたスケールと、前記光源から出射された光ビームによる、前記光学パターンからの反射光または透過光を受光する光検出器を備える光学式エンコーダにおいて、
前記スケールが、その光学特性が周期的に変化する反射型の第1の周期パターンと、その光学的特性が周期的に変化する透過型の第2の周期パターンとを有し、 前記光検出器が、前記スケールの反射型の第1の周期パターンからの反射光を受光する第1の光検出器と、前記スケールの透過型の第2の周期パターンからの反射光を受光する第2の光検出器とを有し、
前記スケールの反射型の第1の周期パターンのピッチをP1とし、前記スケールの透過型の第2の周期パターンのピッチをP2としたとき、P2>10×P1なる関係を有していることを特徴とする光学式エンコーダ。
【0159】
上記のように構成することにより、反射型の光学パターンの情報を検出可能で、かつ、反射型の光学パターンの影響を受けずに、透過型光学パターンの情報をも検出可能な光学式エンコーダをより小型で高性能化することが可能となり、さらに、これを用いたサーボモータを提供することが可能となる。
【0160】
なお、上記11.の光学式エンコーダの詳細については、第1及び第4の実施の形態において述べられている。
【0161】
12. 前記第1及び第2の光検出器が、それぞれ、90度位相差を有する2相信号と、120度位相差を有する3相信号とを出力することを特徴とする1.乃至5.及び11.のいずれか一つに記載の光学式エンコーダ。
【0162】
上記のように構成することにより、スケールの移動量、方向を検出するための90度位相差を有するAB相信号と、モータの磁極の位置を検出しモータを制御するための120度位相差のUVW信号を出力可能な光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0163】
なお、上記12.の光学式エンコーダの詳細については、第1の実施の形態において述べられている。
【0164】
13. 光源と、前記光源に対して相対的に移動し、所定ピッチの周期的な光学パターンが形成されたスケールと、前記光源から出射された光ビームによる、前記光学パターンからの反射光を受光する光検出器を備える光学式エンコーダにおいて、
前記スケールが、その光学特性が周期的に変化する反射型の第1の周期パターンと、その磁気的特性が周期的に変化する第2の周期パターンとを有し、
前記光検出器が、前記スケールの反射型の第1の周期パターンからの反射光を受光し、
前記スケールの磁気的特性が周期的に変化する第2の周期パターンの磁気的変化を検出する磁気検出器をさらに有し、
前記第1の周期パターンのピッチをP1とし、前記第2の周期パターンのピッチをP2としたとき、P2>10×P1なる関係を有していることを特徴とする光学式エンコーダ。
【0165】
上記のように構成することにより、スケールの移動量、方向を検出するための90度位相差を有するAB相信号と、モータの磁極の位置を検出しモータを制御するための120度位相差のUVW信号を出力可能な光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0166】
なお、上記13.の光学式エンコーダの詳細については、第5の実施の形態において述べられている。
【0167】
14. 前記光検出器及び磁気検出器が、それぞれ、90度位相差を有する2相信号と、120度位相差を有する3相信号とを出力することを特徴とする6.乃至10.及び13.のいずれか一つに記載の光学式エンコーダ。
【0168】
上記のように構成することにより、スケールの移動量、方向を検出するための90度位相差を有するAB相信号と、モータの磁極の位置を検出しモータを制御するための120度位相差のUVW信号を出力可能な光学式エンコーダ及び、それを用いたサーボモータを提供することが可能となる。
【0169】
なお、上記14.の光学式エンコーダの詳細については、第1及び第5の実施の形態において述べられている。
【0170】
そして、上述したような実施の形態で示した本明細書には、特許請求の範囲に示した請求項1乃至14以外にも、以下に付記1として示すような発明が含まれている。
【0171】
(付記1) 請求項1乃至14に記載の光学式エンコーダを用いて制御を行うことを特徴とする、交流サーボモータ。
【0172】
上記構成によると、小型、高性能で低価格なエンコーダを用いた交流サーボモータを提供することが可能となる。
【0173】
なお、付記1による交流サーボモータの詳細については、第1乃至第5の実施の形態において述べられている。
【0174】
【発明の効果】
従って、以上説明したように、本発明によれば、AB相信号を高分解能に出力可能で、しかも部品点数を少なくし、組立なども容易に行えることにより、小型で低価格な光学式エンコーダを提供することができる。
【図面の簡単な説明】
【図1】図1は、本発明の第1の実施の形態による光学式エンコーダの構成を示す側面図である。
【図2】図2は、図1のスケール20に形成される、AB相用光学パターンとしての反射型の光学パターン22と、UVW相用光学パターンとしての透過型の光学パターン24とを示す下面図である。
【図3】図3は、図1のスケール20の側断面である。
【図4】図4は、本発明の第2の実施の形態において、スケール20上の同一のトラック上に重ねて形成される、AB相用光学パターンとしての反射型の光学パターン22と、UVW相用光学パターンとしての透過型の光学パターン24とを示す下面図である。
【図5】図5の(a)は、本発明の第2の実施の形態によるスケール20の断面図であり、図5の(b)は、この第2の実施の形態の変形例によるスケール20の断面図である。
【図6】図6は、本発明の第2の実施の形態による光学式エンコーダの構成を示す側面図である。
【図7】図7は、本発明の第3の実施の形態において、スケール20上の同一のトラック上に重ねて形成される、AB相用光学パターンとしての反射型の光学パターン22と、UVW相用光学パターンとしての透過型の光学パターン24とを示す下面図である。
【図8】図8は、本発明の第4の実施の形態による光学式エンコーダの主要部の構成を示す側面図である。
【図9】図9は、本発明の第5の実施の形態による光学式エンコーダの構成を示す側面図である。
【図10】図10は、同じく第5の実施の形態によるスケール20の側断面図である。
【図11】図11は、図10のスケール20の基材28に形成される磁気パターンN,Sと、反射型の光学パターン22とを示す下面図である。
【図12】図12は、本発明の各実施の形態に適用される、UVWの3相の出力信号を出力するために、スケール20に形成されるAB相用光学パターンとしての反射型の光学パターン22、透過型の光学パターン24と対応する同一円周上に120度の位相差を持って3個のセンサヘッド3−U、3−V、3−Wが配置されている構成を示す図である。
【図13】図13は、従来技術として、AB相信号用を検出するためのスケールとセンサ1組と、UVW相を検出するためのスケールとセンサ1組の、都合2組のスケールとセンサを用いて制御を行う構成を示す図である。
【図14】図14は、従来技術として特開平10−132605公報に開示されている、一つの周期パターンを有するスケールと、これを検出するためのセンサ部一組と、このセンサからの出力信号を異なる周期に内挿するための二つの内挿手段を用いる位置検出装置の主要部の構成を示す図である。
【符号の説明】
1…反射型のセンサヘッド、
3…透過型センサヘッド、
20…スケール、
11…光源、
13…光検出器、
22…反射型の光学パターン、
31…光源、
33…光検出器、
26…基材(透明な部材)、
28…基材(磁化可能な部材)、
N,S…磁気パターン。
Claims (3)
- 光源と、前記光源に対して相対的に移動し、所定ピッチの周期的な光学パターンが形成されたスケールと、前記光源から出射された光ビームによる前記スケールの光学パターンからの反射光または透過光を受光する光検出器とを備える光学式エンコーダにおいて、
前記スケールが、少なくとも一つの反射型の光学パターンと、少なくとも一つの透過型の光学パターンとを有し、かつ、前記反射型の光学パターンの形成されたトラックと、前記透過型の光学パターンの形成されたトラックとが重なりを有し、前記反射型の光学パターンの有するピッチをPrとし、前記透過型の光学パターンの有するピッチをPtとしたとき、Pt>Prなる関係を有しており、
前記光検出器が、前記スケールの反射型の光学パターンからの反射光を受光する第1の光検出器と、前記スケールの透過型の光学パターンからの透過光を受光する第2の光検出器とを有することを特徴とする、光学式エンコーダ。 - 前記反射型の光学パターンの有するピッチをPrとし、前記透過型の光学パターンの有するピッチをPtとしたとき、Pt>10×Prなる関係を有していることを特徴とする請求項1に記載の光学式エンコーダ。
- 前記スケールの反射型の光学パターンのトラック幅をWrとし、前記スケールの透過型の光学パターンのトラック幅をWtとしたとき、Wt≧Wrなる関係を有していることを特徴とする請求項1又は2に記載の光学式エンコーダ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002188554A JP4020713B2 (ja) | 2002-06-27 | 2002-06-27 | 光学式エンコーダ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002188554A JP4020713B2 (ja) | 2002-06-27 | 2002-06-27 | 光学式エンコーダ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004028905A JP2004028905A (ja) | 2004-01-29 |
| JP2004028905A5 JP2004028905A5 (ja) | 2005-10-06 |
| JP4020713B2 true JP4020713B2 (ja) | 2007-12-12 |
Family
ID=31183274
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002188554A Expired - Fee Related JP4020713B2 (ja) | 2002-06-27 | 2002-06-27 | 光学式エンコーダ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4020713B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106123934A (zh) * | 2016-08-26 | 2016-11-16 | 长春禹衡光学有限公司 | 一种分体式光栅编码器 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5393952B2 (ja) * | 2007-03-01 | 2014-01-22 | 株式会社アイエイアイ | リニアエンコーダとアクチュエータ |
| JP2009036637A (ja) * | 2007-08-01 | 2009-02-19 | Sony Corp | 変位測定装置 |
| JP2011095180A (ja) * | 2009-10-30 | 2011-05-12 | Iai:Kk | エンコーダ及びサーボモータ |
| JP2011099869A (ja) * | 2011-01-17 | 2011-05-19 | Canon Inc | 光学式エンコーダ |
| DE102013222197A1 (de) * | 2013-10-31 | 2015-04-30 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| CN108731710A (zh) * | 2018-07-11 | 2018-11-02 | 上海市雷智电机有限公司 | 一种编码器 |
-
2002
- 2002-06-27 JP JP2002188554A patent/JP4020713B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106123934A (zh) * | 2016-08-26 | 2016-11-16 | 长春禹衡光学有限公司 | 一种分体式光栅编码器 |
| CN106123934B (zh) * | 2016-08-26 | 2019-01-25 | 长春禹衡光学有限公司 | 一种分体式光栅编码器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004028905A (ja) | 2004-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7259863B2 (en) | Grating interference type optical encoder | |
| JP4037903B2 (ja) | 相対移動検出装置 | |
| US5663794A (en) | Displacement information detection apparatus, scale used in the apparatus, and drive apparatus using the apparatus | |
| JP5111243B2 (ja) | アブソリュートエンコーダ | |
| JP3210111B2 (ja) | 変位検出装置 | |
| JP5882590B2 (ja) | 光学式エンコーダおよび光学式エンコーダを有する装置 | |
| EP0628791B1 (en) | Rotation detecting apparatus and scale for the same | |
| WO2008024606A2 (en) | Rotary optical encoder employing multiple sub-encoders with common reticle substrate | |
| WO2011152076A1 (ja) | ロータリエンコーダ、ロータリモータ及びロータリモータシステム | |
| RU2471289C1 (ru) | Оптический кодер | |
| JP4981203B2 (ja) | 光学式エンコーダー | |
| JPH02285214A (ja) | 測長器及びそれに用いるスケール部材 | |
| JP4750407B2 (ja) | 光学式エンコーダ | |
| JP4020713B2 (ja) | 光学式エンコーダ | |
| JP3005131B2 (ja) | 変位検出装置 | |
| JP4900140B2 (ja) | 光学式エンコーダ | |
| JPH08327401A (ja) | 変位情報検出装置、駆動制御装置、及び変位情報検出用スケール | |
| JP5902891B2 (ja) | エンコーダ及び校正方法 | |
| JP2001343256A (ja) | 光学式エンコーダ | |
| JP2002139353A (ja) | 光学式ロータリエンコーダ | |
| JP3199549B2 (ja) | エンコーダ装置 | |
| JP3303505B2 (ja) | 光学式変位測定装置 | |
| JP5647441B2 (ja) | 停止位置制御用モータ | |
| JP2008298592A (ja) | 光学式エンコーダ | |
| JPH04351918A (ja) | エンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050530 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050530 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070808 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070911 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070925 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4020713 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111005 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111005 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121005 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131005 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |