JP4878226B2 - 駆動装置 - Google Patents
駆動装置 Download PDFInfo
- Publication number
- JP4878226B2 JP4878226B2 JP2006175210A JP2006175210A JP4878226B2 JP 4878226 B2 JP4878226 B2 JP 4878226B2 JP 2006175210 A JP2006175210 A JP 2006175210A JP 2006175210 A JP2006175210 A JP 2006175210A JP 4878226 B2 JP4878226 B2 JP 4878226B2
- Authority
- JP
- Japan
- Prior art keywords
- magnet
- rotor yoke
- yoke
- magnetic pole
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K37/00—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors
- H02K37/10—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type
- H02K37/20—Motors with rotor rotating step by step and without interrupter or commutator driven by the rotor, e.g. stepping motors of permanent magnet type with rotating flux distributors, the armatures and magnets both being stationary
Description
前記第1のマグネットと前記第2のマグネットは前記ロータヨークの径方向にて互いに向かい合うように配置され、前記第1のマグネットと前記第2のマグネットとの間に前記ロータヨークが配置され、前記第1のマグネットの磁極に対して前記第2のマグネットの磁極が所定の位相差を持つように、前記第1のマグネットと前記第2のマグネットとは配置されることを特徴とする。
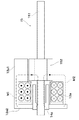
図1は、本発明の第1の実施の形態に係る駆動装置としてのステッピングモータの構成部品を示す分解斜視図である。図2は、組立完成状態におけるステッピングモータの軸方向の構造を示す断面図である。図3は、図2の矢視A−A線に沿うステッピングモータの構造を示す断面図である。
図10は、本発明の第2の実施の形態に係る駆動装置としてのステッピングモータの構成部品を示す分解斜視図である。図11は、組立完成状態におけるステッピングモータの中心軸に垂直な断面を示す断面図である。
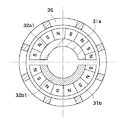
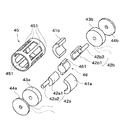
図12は、本発明の第3の実施の形態に係る駆動装置としてのステッピングモータの構成部品を示す分解斜視図である。図13は、組立完成状態におけるステッピングモータの軸方向の構造を示す断面図である。図14は、図13の矢視B−B線に沿うステッピングモータの構造を示す断面図である。
図15は、本発明の第4の実施の形態に係る駆動装置としてのステッピングモータの構成部品を示す分解斜視図である。図16は、組立完成状態におけるステッピングモータの軸方向の構造を示す断面図である。図17は、図16の矢視C−C線に沿うステッピングモータの構造を示す断面図である。
上記第1乃至第4の実施の形態では、ステッピングモータ単体について説明したが、ステッピングモータを撮像装置に搭載して駆動源として用いるなど、各種の応用が可能である。
11b、31b、41b 第2のマグネット
12a、22a、32a、42a 第1のステータヨーク
12b、22b、32b、42b 第2のステータヨーク
13a、33a、43a 第1のコイル
13b、33b、43b 第2のコイル
14a、34a、44a 第1の軸受
14b、34b、44b 第2の軸受
15、25、35、45 ロータヨーク
21 マグネット
46 ステータヨーク連結部材
Claims (5)
- シャフト部と前記シャフト部から径方向に突出する複数の磁極部が形成されたロータヨークと、
前記ロータヨークの前記磁極部に対向するように配置されるものであって、円弧形状を有し、内周面に周方向に沿って交互に異なる磁極が着磁された第1のマグネットと、
前記第1のマグネットの外周面に接するように配置されるものであって、前記ロータヨークのシャフト部の一方端を回転可能に軸支する第1のステータヨークと、
前記第1のステータヨークを介して、前記ロータヨークの磁極部を励磁する第1のコイルと、
前記ロータヨークの前記磁極部に対向するように配置されるものであって、円弧形状を有し、内周面に周方向に沿って交互に異なる磁極が着磁された第2のマグネットと、
前記第2のマグネットの外周面に接するように配置されるものであって、前記ロータヨークのシャフト部の他方端を回転可能に軸支する第2のステータヨークと、
前記第2のステータヨークを介して、前記ロータヨークの磁極部を励磁する第2のコイルとを備え、
前記第1のマグネットと前記第2のマグネットは前記ロータヨークの径方向にて互いに向かい合うように配置され、前記第1のマグネットと前記第2のマグネットとの間に前記ロータヨークが配置され、前記第1のマグネットの磁極に対して前記第2のマグネットの磁極が所定の位相差を持つように、前記第1のマグネットと前記第2のマグネットとは配置されることを特徴とする駆動装置。 - シャフト部と前記シャフト部から径方向に突出する複数の磁極部が形成されたロータヨークと、
前記ロータヨークの前記磁極部に対向するように配置されるものであって、円筒形状を有し、内周面が周方向に沿って複数の領域に分割され、該分割された領域は第1の着磁パターンもしくは第2の着磁パターンで着磁され、且つ該分割された領域の間には非着磁部が形成されるマグネットと、
前記第1の着磁パターンで着磁された前記マグネットの分割された領域に接するように配置されるものであって、前記ロータヨークのシャフト部の一方端を回転可能に軸支する第1のステータヨークと、
前記第1のステータヨークを介して、前記ロータヨークの磁極部を励磁する第1のコイルと、
前記第2の着磁パターンで着磁された前記マグネットの分割された領域に接するように配置されるものであって、前記ロータヨークのシャフト部の他方端を回転可能に軸支する第2のステータヨークと、
前記第2のステータヨークを介して、前記ロータヨークの磁極部を励磁する第2のコイルとを備え、
前記第1の着磁パターンで着磁された領域同士が前記ロータヨークの径方向にて互いに向かい合うように配置されるとともに、前記第2の着磁パターンで着磁された領域同士が前記ロータヨークの径方向にて互いに向かい合うように配置され、前記マグネットの内側に前記ロータヨークが配置され、前記第1の着磁パターンと前記第2の着磁パターンとが所定の位相差を持つように、前記マグネットの分割された領域は着磁されることを特徴とする駆動装置。 - 円筒形状を有し、周面に周方向に沿って複数の磁極部が形成されたロータヨークと、
前記ロータヨークの内側で、前記ロータヨークの前記磁極部に対向するように配置されるものであって、円弧形状を有し、外周面に周方向に沿って交互に異なる磁極が着磁された第1のマグネットと、
前記第1のマグネットの内周面に接するように配置されるものであって、前記ロータヨークの一方端を回転可能に軸支する第1のステータヨークと、
前記第1のステータヨークを介して、前記ロータヨークの磁極部を励磁する第1のコイルと、
前記ロータヨークの内側で、前記ロータヨークの前記磁極部に対向するように配置されるものであって、円弧形状を有し、外周面に周方向に沿って交互に異なる磁極が着磁された第2のマグネットと、
前記第2のマグネットの内周面に接するように配置されるものであって、前記ロータヨークの他方端を回転可能に軸支する第2のステータヨークと、
前記第2のステータヨークを介して、前記ロータヨークの磁極部を励磁する第2のコイルとを備え、
前記第1のマグネットと前記第2のマグネットとは前記ロータヨークの径方向にて互いに向かい合うように配置され、前記第1のマグネットの磁極に対して前記第2のマグネットの磁極が所定の位相差を持つように、前記第1のマグネットと前記第2のマグネットとは配置されることを特徴とする駆動装置。 - 円筒形状を有し、周面に周方向に沿って複数の磁極部が形成されるロータヨークと、
前記ロータヨークの前記磁極部に対向するように配置されるものであって、円弧形状を有し、外周面に周方向に沿って交互に異なる磁極が着磁された第1のマグネットと、
前記第1のマグネットの内周面を覆う第1の磁極部、及び前記ロータヨークに対して回転可能に支持されるシャフト部が形成された第1のステータヨークと、
前記第1のステータヨークを介して、前記ロータヨークの磁極部を励磁する第1のコイルと、
前記ロータヨークの前記磁極部に対向するように配置されるものであって、円弧形状を有し、外周面に周方向に沿って交互に異なる磁極が着磁された第2のマグネットと、
前記第2のマグネットの内周面を覆う第2の磁極部、及び前記ロータヨークに対して回転可能に支持されるシャフト部が形成された第2のステータヨークと、
前記第2のステータヨークを介して、前記ロータヨークの磁極部を励磁する第2のコイルと、
前記第1の磁極部の内周面と前記第2の磁極部の内周面とが互いに向かい合うように、前記第1のステータヨークと前記第2のステータヨークとを連結するものであって、非磁性材料で形成される連結部材とを備え、
前記ロータヨークに前記第1および第2のコイルが固定され、前記ロータヨークは前記連結部材にて連結される前記第1および第2のステータヨークを回転可能に軸支し、前記第1のマグネットの磁極に対して前記第2のマグネットの磁極が所定の位相差を持つように、前記第1のマグネットと前記第2のマグネットとは配置されることを特徴とする駆動装置。 - 前記所定の位相差はP/4(P:着極ピッチ)の位相差であることを特徴とする請求項1乃至4のいずれか1項に記載の駆動装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006175210A JP4878226B2 (ja) | 2006-06-26 | 2006-06-26 | 駆動装置 |
| US11/766,842 US7626291B2 (en) | 2006-06-26 | 2007-06-22 | Drive apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006175210A JP4878226B2 (ja) | 2006-06-26 | 2006-06-26 | 駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008005670A JP2008005670A (ja) | 2008-01-10 |
| JP2008005670A5 JP2008005670A5 (ja) | 2011-03-10 |
| JP4878226B2 true JP4878226B2 (ja) | 2012-02-15 |
Family
ID=38872897
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006175210A Expired - Fee Related JP4878226B2 (ja) | 2006-06-26 | 2006-06-26 | 駆動装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7626291B2 (ja) |
| JP (1) | JP4878226B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4378327B2 (ja) * | 2005-07-28 | 2009-12-02 | キヤノン株式会社 | 駆動装置 |
| JP4295329B2 (ja) * | 2007-03-30 | 2009-07-15 | ミネベアモータ株式会社 | ステッピングモータ |
| US20090046421A1 (en) * | 2007-08-15 | 2009-02-19 | Richard Sohaney | System and Method for Reducing Information Handling System Cooling Fan Noise |
| SG176849A1 (en) * | 2009-07-16 | 2012-02-28 | Cameron Int Corp | Electric motor including a position holding device |
| US9868183B2 (en) * | 2009-10-16 | 2018-01-16 | Weiss Gmbh | Rotary indexing table having a direct drive of the transport cam |
| WO2014037023A1 (en) * | 2012-09-10 | 2014-03-13 | Cameron International Corporation | Magnetic holding brake and actuator with a magnetic holding brake |
| CN105006334B (zh) * | 2015-06-23 | 2017-08-18 | 歌尔股份有限公司 | 多磁路充磁工艺 |
| KR102622136B1 (ko) * | 2016-11-07 | 2024-01-08 | 현대모비스 주식회사 | 회전자 분할형 모터 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1199155A (en) * | 1966-10-31 | 1970-07-15 | Plessey Co Ltd | Improvements in or relating to Rotary Electric Machines |
| JPS63686U (ja) * | 1986-06-20 | 1988-01-06 | ||
| JPS6458288A (en) * | 1987-08-31 | 1989-03-06 | Takara Co Ltd | Engine-travelling toy |
| JPH06261506A (ja) * | 1993-03-09 | 1994-09-16 | Nisca Corp | ステッピングモータ |
| JP3133270B2 (ja) | 1996-04-08 | 2001-02-05 | キヤノン株式会社 | モータ及び繰出し装置 |
| EP0851560B1 (en) * | 1996-12-27 | 2001-10-31 | Canon Kabushiki Kaisha | Compact stepping motor |
| JP3548425B2 (ja) * | 1998-04-17 | 2004-07-28 | キヤノン株式会社 | モータ |
| JP2002051526A (ja) | 2000-07-31 | 2002-02-15 | Canon Inc | モータ |
| JP2005033860A (ja) * | 2003-07-08 | 2005-02-03 | Minebea Co Ltd | クローポール型ステッピングモータのモータ構造 |
| JP4272075B2 (ja) | 2004-01-16 | 2009-06-03 | ミネベア株式会社 | ステッピングモータ |
| JP4387858B2 (ja) * | 2004-04-14 | 2009-12-24 | キヤノン株式会社 | ステッピングモータ |
-
2006
- 2006-06-26 JP JP2006175210A patent/JP4878226B2/ja not_active Expired - Fee Related
-
2007
- 2007-06-22 US US11/766,842 patent/US7626291B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20070296312A1 (en) | 2007-12-27 |
| US7626291B2 (en) | 2009-12-01 |
| JP2008005670A (ja) | 2008-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4878226B2 (ja) | 駆動装置 | |
| JP2007267565A (ja) | コアレスモータ | |
| US9705391B2 (en) | Stepping motor, lens apparatus, and image pickup apparatus | |
| KR100443737B1 (ko) | 스태핑 모터 | |
| EP1445851B1 (en) | Motor | |
| JP2009195055A (ja) | 回転電機 | |
| JP4748649B2 (ja) | 駆動装置 | |
| JP2005295756A (ja) | モータおよび光学装置 | |
| US20030234586A1 (en) | Stepping motor | |
| JP7043824B2 (ja) | スピンドルモータおよびそれを備えるディスク駆動装置 | |
| JP2013183511A (ja) | アクチュエータ | |
| JP2007037244A (ja) | 駆動装置 | |
| US20030107274A1 (en) | Stepping motor | |
| JP2007116850A (ja) | 永久磁石式回転電機および円筒型リニアモータ | |
| JP4047317B2 (ja) | ステッピングモータ | |
| JP5126464B2 (ja) | ステッピングモータ及びカメラの焦点調整用アクチュエータ | |
| JP2007143253A (ja) | ステッピングモータ | |
| JP2005121801A (ja) | 駆動装置、光量調節装置及びレンズ駆動装置 | |
| JP2005143207A (ja) | ステッピングモータ | |
| JP7258824B2 (ja) | 回転電機 | |
| JPH0678506A (ja) | ラジアル型アウターロータ方式ブラシレスモータ | |
| JP2020089101A (ja) | モータ及びモータ駆動装置 | |
| KR101006932B1 (ko) | 스테핑 모터 | |
| JP2023040667A (ja) | モータ | |
| JP2006280105A (ja) | 駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090624 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090624 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111122 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111125 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141209 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |