JP4872525B2 - プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラム - Google Patents
プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラム Download PDFInfo
- Publication number
- JP4872525B2 JP4872525B2 JP2006221182A JP2006221182A JP4872525B2 JP 4872525 B2 JP4872525 B2 JP 4872525B2 JP 2006221182 A JP2006221182 A JP 2006221182A JP 2006221182 A JP2006221182 A JP 2006221182A JP 4872525 B2 JP4872525 B2 JP 4872525B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- projection
- unit
- distance
- reflected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C1/00—Measuring angles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
- G01C3/08—Use of electric radiation detectors
Description
投影光を投影面に投影し、光源、SOM、投影レンズを有する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影レンズから前記投影面までの距離を取得する測距部と、を備え、
前記投影部は、画像投影時に、前記光源と前記SOMによって生成される投影光を前記投影レンズによって投影し、
前記測距部は、投影面までの距離を測距する際に、前記受光部が受光する前記光源と前記光変調部と前記SOMと前記投影レンズとによって投影される投影光の反射光に基づいて、前記投影レンズから前記投影面までの距離を取得することを特徴とする。
投影光を投影面に投影し、光源、SOM、投影レンズを有する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を、複数の受光点に配置された複数の受光素子で受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部の複数の受光素子が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影レンズから前記投影面の複数の点までの距離を取得する測距部と、
前記測距部が取得した複数の距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する投影面傾き角度取得部と、を備え、
前記投影部は、画像投影時に、前記光源と前記SOMによって生成される投影光を前記投影レンズによって投影し、
前記測距部は、投影面までの距離を測距する際に、前記受光部が受光する前記光源と前記光変調部と前記SOMと前記投影レンズとによって投影される投影光の反射光に基づいて、前記投影レンズから前記投影面までの距離を取得することを特徴とする。
前記光変調部は、前記光源に供給する電流のAM変調を行うことにより、前記投影光の光強度を変調するものであってもよい。
光源、SOM、投影レンズを介して投影面に投影光を投影する投影ステップと、
前記投影光の光強度を変調する光変調ステップと、
前記投影面で反射した反射光を受光する受光ステップと、
前記投影光と前記反射光との位相のずれ量を検出する検出ステップと、
前記検出した位相のずれ量に基づいて、前記投影レンズから前記投影面までの距離を取得する距離算出ステップと、を備え、
前記投影ステップにおける画像投影時に、前記光源と前記SOMによって生成される投影光を前記投影レンズによって投影し、
前記測距ステップにおける測距時に、前記投影ステップと前記光変調ステップと前記受光ステップとを用いて、前記光源と前記光変調ステップと前記SOMとによって生成した投影光を前記投影レンズによって投影すると共に、前記受光ステップで反射光を受光して前記投影レンズから前記投影面までの距離を取得することを特徴とする。
光源、SOM、投影レンズを介して投影面に投影光を投影する投影ステップと、
前記投影光の光強度を変調する光変調ステップと、
前記投影面で反射した反射光を複数の受光点で受光する受光ステップと、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出する検出ステップと、
前記検出した位相のずれ量に基づいて、前記投影レンズから前記投影面上の複数の点までのそれぞれの距離を取得する距離算出ステップと、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する傾斜角取得ステップと、を備え、
前記測距ステップにおける測距時に、前記投影ステップと前記光変調ステップと前記受光ステップとを用いて、前記光源と前記光変調ステップと前記SOMとによって生成した投影光を前記投影レンズによって投影すると共に、前記受光ステップで反射光を受光して前記投影レンズから前記投影面までの距離を取得することを特徴とする。
光源、SOM、投影レンズを介して投影面に投影光を投影する投影手順、
前記投影光の光強度を変調する光変調手順、
前記投影面で反射した反射光を受光する受光手順、
前記投影光と前記反射光との位相のずれ量を検出する検出手順、
前記光源と前記光変調手順と前記SOMとによって生成した投影光を前記投影レンズによって投影すると共に、前記受光手順で反射光を受光して、前記検出手順で検出した位相のずれ量に基づいて、前記投影レンズから前記投影面までの距離を取得する距離算出手順、を実行させるためのものである。
コンピュータに、
光源、SOM、投影レンズを介して投影面に投影光を投影する投影手順、
前記投影光の光強度を変調する光変調手順、
前記投影面で反射した反射光を複数の受光点で受光する受光手順、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出する検出手順、
前記光源と前記光変調手順と前記SOMとによって生成した投影光を前記投影レンズによって投影すると共に、前記受光手順で反射光を受光して、前記検出手順で検出した位相のずれ量に基づいて、前記投影レンズから前記投影面上の複数の点までのそれぞれの距離を取得する距離算出手順、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する傾斜角取得手順、
を実行させるためのものである。
本実施形態に係るプロジェクタの構成を図1に示す。
本実施形態に係るプロジェクタ1は、入出力コネクタ部11と、入出力I/F(インタフェース)12と、画像処理部13と、ビデオRAM14と、表示エンコーダ15と、投影部16と、投影面傾き計測装置17と、キー/インジケータ部18と、Ir受信部19と、制御部20と、画像記憶部21と、スピーカ22と、音声処理部23と、を備える。
図6の(a)に示すように、光源部165からの光の強度が曲線イのように変化するものとする。図6の(b)に示すように、この曲線イに対して、受光量が曲線ロのように変化し、曲線イと曲線ロとの位相差(位相のずれ量)がΔφとすると、この位相差Δφが光の飛行時間に相当する。
A0=A・sin(Δφ)+B ・・・(1)
A1=A・sin(π/2+Δφ)+B ・・・(2)
A2=A・sin(π+Δφ)+B ・・・(3)
A3=A・sin(3π/2+Δφ)+B ・・・(4)
尚、Aは最大光強度、Bは直流成分(外光成分と反射光成分との平均値)を示す。ただし、図6のTwは受光量A0,A1,A2,A3を得るためのそれぞれの受光期間を表している。

キー/インジケータ部18の電源キーが押下されると、キー/インジケータ部18は、この操作情報を制御部20に供給し、制御部20は、この操作情報に基づいてプロジェクタ1の電源をオンする。
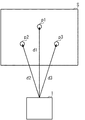
また、演算部173は、式(8)に従い、取得した位相のずれ量Δφに基づいて距離d1〜d3を取得する(ステップS15の処理)。
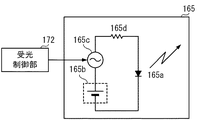
例えば、上記実施形態では、光源部165のAM変調器165cが行うAM変調の変調周波数は、10MHzに限られるものではなく、さらに、高い変調周波数、あるいは、10MHz未満の変調周波数であってもよい。
Claims (10)
- 投影光を投影面に投影し、光源、SOM、投影レンズを有する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影レンズから前記投影面までの距離を取得する測距部と、を備え、
前記投影部は、画像投影時に、前記光源と前記SOMによって生成される投影光を前記投影レンズによって投影し、
前記測距部は、投影面までの距離を測距する際に、前記受光部が受光する前記光源と前記光変調部と前記SOMと前記投影レンズとによって投影される投影光の反射光に基づいて、前記投影レンズから前記投影面までの距離を取得する
ことを特徴とするプロジェクタ。 - 投影光を投影面に投影し、光源、SOM、投影レンズを有する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を、複数の受光点に配置された複数の受光素子で受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部の複数の受光素子が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影レンズから前記投影面の複数の点までの距離を取得する測距部と、
前記測距部が取得した複数の距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する投影面傾き角度取得部と、を備え、
前記投影部は、画像投影時に、前記光源と前記SOMによって生成される投影光を前記投影レンズによって投影し、
前記測距部は、投影面までの距離を測距する際に、前記受光部が受光する前記光源と前記光変調部と前記SOMと前記投影レンズとによって投影される投影光の反射光に基づいて、前記投影レンズから前記投影面までの距離を取得する
ことを特徴とするプロジェクタ。 - 前記投影部は、電流が供給されて前記投影光を生成する光源を備え、
前記光変調部は、前記光源に供給する電流のAM変調を行うことにより、前記投影光の光強度を変調する、
ことを特徴とする請求項1又は2に記載のプロジェクタ。 - 前記光源は、発光ダイオードによって構成されたものである、
ことを特徴とする請求項3に記載のプロジェクタ。 - 前記光源は、レーザによって構成されたものである、
ことを特徴とする請求項3に記載のプロジェクタ。 - 前記受光部は、複数の受光素子が行列配置され、各受光素子が受光した光の受光量に基づいて前記投影面上の複数の点までの距離を取得する距離画像センサによって構成されたものである、
ことを特徴とする請求項2に記載のプロジェクタ。 - 光源、SOM、投影レンズを介して投影面に投影光を投影する投影ステップと、
前記投影光の光強度を変調する光変調ステップと、
前記投影面で反射した反射光を受光する受光ステップと、
前記投影光と前記反射光との位相のずれ量を検出する検出ステップと、
前記検出した位相のずれ量に基づいて、前記投影レンズから前記投影面までの距離を取得する距離算出ステップと、を備え、
前記投影ステップにおける画像投影時に、前記光源と前記SOMによって生成される投影光を前記投影レンズによって投影し、
前記測距ステップにおける測距時に、前記投影ステップと前記光変調ステップと前記受光ステップとを用いて、前記光源と前記光変調ステップと前記SOMとによって生成した投影光を前記投影レンズによって投影すると共に、前記受光ステップで反射光を受光して前記投影レンズから前記投影面までの距離を取得する
ことを特徴とするプロジェクタの距離計測方法。 - 光源、SOM、投影レンズを介して投影面に投影光を投影する投影ステップと、
前記投影光の光強度を変調する光変調ステップと、
前記投影面で反射した反射光を複数の受光点で受光する受光ステップと、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出する検出ステップと、
前記検出した位相のずれ量に基づいて、前記投影レンズから前記投影面上の複数の点までのそれぞれの距離を取得する距離算出ステップと、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する傾斜角取得ステップと、を備え、
前記測距ステップにおける測距時に、前記投影ステップと前記光変調ステップと前記受光ステップとを用いて、前記光源と前記光変調ステップと前記SOMとによって生成した投影光を前記投影レンズによって投影すると共に、前記受光ステップで反射光を受光して前記投影レンズから前記投影面までの距離を取得する
ことを特徴とするプロジェクタの投影面傾き取得方法。 - コンピュータに、
光源、SOM、投影レンズを介して投影面に投影光を投影する投影手順、
前記投影光の光強度を変調する光変調手順、
前記投影面で反射した反射光を受光する受光手順、
前記投影光と前記反射光との位相のずれ量を検出する検出手順、
前記光源と前記光変調手順と前記SOMとによって生成した投影光を前記投影レンズによって投影すると共に、前記受光手順で反射光を受光して、前記検出手順で検出した位相のずれ量に基づいて、前記投影レンズから前記投影面までの距離を取得する距離算出手順、
を実行させるためのプログラム。 - コンピュータに、
光源、SOM、投影レンズを介して投影面に投影光を投影する投影手順、
前記投影光の光強度を変調する光変調手順、
前記投影面で反射した反射光を複数の受光点で受光する受光手順、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出する検出手順、
前記光源と前記光変調手順と前記SOMとによって生成した投影光を前記投影レンズによって投影すると共に、前記受光手順で反射光を受光して、前記検出手順で検出した位相のずれ量に基づいて、前記投影レンズから前記投影面上の複数の点までのそれぞれの距離を取得する距離算出手順、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する傾斜角取得手順、
を実行させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006221182A JP4872525B2 (ja) | 2006-08-14 | 2006-08-14 | プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラム |
| US11/891,564 US7667825B2 (en) | 2006-08-14 | 2007-08-10 | Projector, method of measuring distance to the projector, and method and program for acquiring inclination angles of projection screen |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006221182A JP4872525B2 (ja) | 2006-08-14 | 2006-08-14 | プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008046314A JP2008046314A (ja) | 2008-02-28 |
| JP2008046314A5 JP2008046314A5 (ja) | 2009-09-24 |
| JP4872525B2 true JP4872525B2 (ja) | 2012-02-08 |
Family
ID=39050399
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006221182A Expired - Fee Related JP4872525B2 (ja) | 2006-08-14 | 2006-08-14 | プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7667825B2 (ja) |
| JP (1) | JP4872525B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2816455A1 (en) | 2013-06-18 | 2014-12-24 | Funai Electric Co., Ltd. | Projector with photodetector for inclination calculation of an object |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010085133A (ja) * | 2008-09-30 | 2010-04-15 | Casio Computer Co Ltd | 距離測定装置、距離測定方法及び投影装置 |
| JP6011157B2 (ja) * | 2011-09-05 | 2016-10-19 | 株式会社リコー | 投影システム、投影装置、センサ装置、発電制御方法及び発電制御プログラム |
| JPWO2018167999A1 (ja) * | 2017-03-17 | 2020-01-16 | パナソニックIpマネジメント株式会社 | プロジェクタ及びプロジェクタシステム |
| JP7008244B2 (ja) * | 2017-07-11 | 2022-01-25 | パナソニックIpマネジメント株式会社 | 投写型映像表示装置 |
| CN108762483B (zh) * | 2018-04-16 | 2021-02-09 | 广景视睿科技(深圳)有限公司 | 一种互动投影仪及互动投影方法 |
| DE102019003049B4 (de) * | 2019-04-27 | 2021-04-29 | Tarsier Gmbh | Vorrichtung und Verfahren zum Erfassen von Objekten |
| CN116457725A (zh) * | 2020-11-25 | 2023-07-18 | 松下知识产权经营株式会社 | 投影装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0728166A (ja) * | 1993-07-14 | 1995-01-31 | Mitsubishi Electric Corp | ビデオプロジェクター装置 |
| US7194112B2 (en) * | 2001-03-12 | 2007-03-20 | Eastman Kodak Company | Three dimensional spatial panorama formation with a range imaging system |
| JP4810763B2 (ja) * | 2001-06-20 | 2011-11-09 | 株式会社デンソー | 距離測定装置 |
| JP2005006228A (ja) * | 2003-06-13 | 2005-01-06 | Casio Comput Co Ltd | プロジェクタ |
| JP2005024523A (ja) * | 2003-07-04 | 2005-01-27 | Nec Viewtechnology Ltd | 距離計測装置および該装置を有するプロジェクタ |
| JP4155890B2 (ja) * | 2003-07-15 | 2008-09-24 | カシオ計算機株式会社 | プロジェクタ、プロジェクタの傾斜角度取得方法及び投影像補正方法 |
| JP3757224B2 (ja) * | 2003-09-03 | 2006-03-22 | Necビューテクノロジー株式会社 | 傾斜角度測定装置を有するプロジェクタ |
| JP3761550B2 (ja) * | 2003-09-24 | 2006-03-29 | Necビューテクノロジー株式会社 | 反射光強度測定機構を有するプロジェクタ |
| JP4725021B2 (ja) * | 2004-02-13 | 2011-07-13 | カシオ計算機株式会社 | 投影装置、投影装置の光源制御方法 |
| JP2005233880A (ja) | 2004-02-23 | 2005-09-02 | Casio Comput Co Ltd | 距離測定装置、投影装置、距離測定方法及びプログラム |
| JP2005331585A (ja) * | 2004-05-18 | 2005-12-02 | Nec Viewtechnology Ltd | 距離傾斜角度測定装置を有するプロジェクタ |
-
2006
- 2006-08-14 JP JP2006221182A patent/JP4872525B2/ja not_active Expired - Fee Related
-
2007
- 2007-08-10 US US11/891,564 patent/US7667825B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2816455A1 (en) | 2013-06-18 | 2014-12-24 | Funai Electric Co., Ltd. | Projector with photodetector for inclination calculation of an object |
| US9405407B2 (en) | 2013-06-18 | 2016-08-02 | Funai Electric Co., Ltd. | Projector |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080036995A1 (en) | 2008-02-14 |
| US7667825B2 (en) | 2010-02-23 |
| JP2008046314A (ja) | 2008-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4872525B2 (ja) | プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラム | |
| JP3772870B2 (ja) | 投影装置、投影方法及びプログラム | |
| JP4020043B2 (ja) | 投影装置、投影方法及びプログラム | |
| JP4609734B2 (ja) | 距離測定装置及びこの距離測定装置を備えたプロジェクタ | |
| JP4483881B2 (ja) | 投影装置、投影制御方法及びプログラム | |
| JP4023447B2 (ja) | 投影装置、投影方法及びプログラム | |
| JP5124965B2 (ja) | 投影装置、投影方法及びプログラム | |
| JP6387644B2 (ja) | 位置検出装置、位置検出システム、及び、位置検出方法 | |
| JP6441966B2 (ja) | レーザ投射表示装置、及びそれに用いるレーザ光源駆動部の制御方法 | |
| JP5246467B2 (ja) | 距離測定装置及びプロジェクタ | |
| JP2007065542A (ja) | 画像投写装置 | |
| JP2001045381A (ja) | 画像処理装置および方法、並びに媒体 | |
| JP5500786B2 (ja) | 投射型表示装置 | |
| JP4301028B2 (ja) | 投影装置、角度検出方法及びプログラム | |
| JP5140973B2 (ja) | 計測面傾き計測装置、プロジェクタ及び計測面傾き計測方法 | |
| JP5292678B2 (ja) | 投影装置、ポインタ表示処理方法およびプログラム | |
| JP4661161B2 (ja) | 投影装置、投影方法及びプログラム | |
| JP5125561B2 (ja) | 投影装置及び投影制御方法 | |
| JP2008020196A (ja) | 投射装置、投射装置の測距方法およびプログラム | |
| JP2012233920A (ja) | 計測面傾き計測装置、プロジェクタ及び計測面傾き計測方法 | |
| JP4556944B2 (ja) | 投影装置、測距処理方法及びプログラム | |
| JP2010283449A (ja) | 投影システム、投影装置、音声制御方法及びプログラム | |
| JP4442242B2 (ja) | 投影装置、角度検出方法及びプログラム | |
| JP2007264334A (ja) | 投影装置、投影方法及びプログラム | |
| JP4806894B2 (ja) | 投影装置、投影方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090807 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090807 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111025 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111107 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4872525 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |