JP4848855B2 - 車載用隊列編成装置及び車両の隊列編成方法 - Google Patents
車載用隊列編成装置及び車両の隊列編成方法 Download PDFInfo
- Publication number
- JP4848855B2 JP4848855B2 JP2006169942A JP2006169942A JP4848855B2 JP 4848855 B2 JP4848855 B2 JP 4848855B2 JP 2006169942 A JP2006169942 A JP 2006169942A JP 2006169942 A JP2006169942 A JP 2006169942A JP 4848855 B2 JP4848855 B2 JP 4848855B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- plan
- travel plan
- platoon
- travel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Description
前記第1走行計画の変更案の受入を前記他の車両又は前記他の隊列に打診するステップとを更に含むものでもよい。
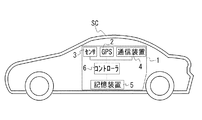
実施例1は隊列走行を希望する自車両SCの車載用隊列編成装置1が、現在位置と目的地だけでなく、走行計画の類似度を評価して隊列を編成すべき他車両等を選択する実施例である。走行計画には経路計画だけでなく、休憩計画を含めておくのが望ましい。
2 GPS
3 各種センサ
4 通信装置
5 記憶装置
6 コントローラ
10 路車間通信
11 交通情報管理装置
SC 自車両
Claims (10)
- 複数の車両で隊列を編成して走行するための車載用隊列編成装置であって、
他の車両又は他の隊列の経路計画及び休憩計画を含む第1走行計画を受信する受信手段と、
自車両又は自隊列の経路計画及び休憩計画を含む第2走行計画を記憶する記憶手段と、
前記第1走行計画と前記第2走行計画との類似度を評価する走行計画類似度評価手段と、
前記類似度に基づいて、隊列を編成する車両または隊列を選択する選択手段とを、備え、
前記選択手段は、前記第2走行計画の休憩計画と異なる休憩計画を含む前記第1走行計画の車両又は隊列を選択対象から除外することを特徴とする車載用隊列編成装置。 - 前記受信手段は、前記他の車両又は前記他の隊列の車種情報及び車両特性情報の少なくとも一方も受信し、前記記憶手段は自車両又は自隊列の車種情報及び車両特性情報の少なくとも一方も記憶し、前記選択手段は前記車種情報及び車両特性情報の少なくとも一方の類似度にも基づいて前記選択を行う、ことを特徴とする請求項1に記載の車載用隊列編成装置。
- 前記第1走行計画と前記第2走行計画とに基づいて、第1走行計画の変更案を作成する計画変更案作成手段と、
前記他の車両又は前記他の隊列に対して前記変更案を送信する送信手段とを、更に備えることを特徴とする請求項1又は2に記載の車載用隊列編成装置。 - 前記選択手段は、前記他の車両若しくは前記他の隊列の第1走行計画又は自車両若しくは自隊列の第2走行計画の変更があった場合に、変更された走行計画案に基づいて隊列を編成する車両または隊列の選択を再度行う、ことを特徴とする請求項1から3のいずれかに記載の車載用隊列編成装置。
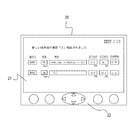
- 前記第1走行計画及び前記第2走行計画に関する情報を表示する表示手段と、前記表示手段で表示された内容を選択指示するための選択入力手段とを更に備え、
前記選択手段が、前記表示手段に前記類似度が所定基準以上である前記他の車両又は前記他の隊列を提示し、
前記選択入力手段で前記他の車両又は前記他の隊列を選択可能とした、ことを特徴とする請求項1から4のいずれかに記載の車載用隊列編成装置。 - 前記所定基準を手動設定するための設定手段を更に備えることを特徴とする請求項5に記載の隊列編成装置。
- 複数の車両で隊列を編成して走行するための隊列編成方法であって、
他の車両又は他の隊列の経路計画及び休憩計画を含む第1走行計画を受信するステップと、
自車両又は自隊列の経路計画及び休憩計画を含む第2走行計画を記憶するステップと、
前記第1走行計画と前記第2走行計画との類似度を評価するステップと、
前記類似度に基づいて、隊列を編成する車両または隊列を選択するステップとを、含み、
前記車両または隊列を選択するステップは、前記第2走行計画の休憩計画と異なる休憩計画を含む前記第1走行計画の車両又は隊列を選択対象から除外することを特徴とする車両の隊列編成方法。 - 前記走行計画の類似度を評価するステップでは、車種情報及び車両特性情報の少なくとも一方についても評価する、ことを特徴とする請求項7に記載の車両の隊列編成方法。
- 前記車両または隊列を選択するステップの後に、前記第1走行計画と前記第2走行計画とに基づいて、第1走行計画の変更案を作成するステップと、
前記第1走行計画の変更案の受入を前記他の車両又は前記他の隊列に打診するステップとを更に含む、ことを特徴とする請求項7又は8に記載の車両の隊列編成方法。 - 前記他の車両若しくは前記他の隊列の第1走行計画又は自車両若しくは自隊列の第2走行計画の変更があった場合に、変更された走行計画案に基づいて隊列を編成する車両または隊列の選択を再度行うステップを更に含む、ことを特徴とする請求項7から9のいずれかに記載の車両の隊列編成方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006169942A JP4848855B2 (ja) | 2006-06-20 | 2006-06-20 | 車載用隊列編成装置及び車両の隊列編成方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006169942A JP4848855B2 (ja) | 2006-06-20 | 2006-06-20 | 車載用隊列編成装置及び車両の隊列編成方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008003675A JP2008003675A (ja) | 2008-01-10 |
| JP4848855B2 true JP4848855B2 (ja) | 2011-12-28 |
Family
ID=39008022
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006169942A Expired - Fee Related JP4848855B2 (ja) | 2006-06-20 | 2006-06-20 | 車載用隊列編成装置及び車両の隊列編成方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4848855B2 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5163248B2 (ja) * | 2008-04-10 | 2013-03-13 | トヨタ自動車株式会社 | 車群走行制御システム |
| JP5568848B2 (ja) * | 2008-08-07 | 2014-08-13 | 富士通株式会社 | 車載装置、及び交通情報システム |
| JP5233655B2 (ja) * | 2008-12-22 | 2013-07-10 | 日本電気株式会社 | 追従対象車検索システム、追従対象車検索方法および追従対象車検索用プログラム |
| CN102292752B (zh) * | 2009-01-20 | 2013-12-04 | 丰田自动车株式会社 | 队列行驶控制系统及车辆 |
| US8738275B2 (en) | 2009-01-23 | 2014-05-27 | Toyota Jidosha Kabushiki Kaisha | Vehicle group control method and vehicle |
| US8700297B2 (en) | 2009-03-05 | 2014-04-15 | Toyota Jidosha Kabushiki Kaisha | Vehicle group forming device and vehicle group forming method |
| EP2390744B1 (en) | 2010-05-31 | 2012-11-14 | Volvo Car Corporation | Control system for travel in a platoon |
| JP5786354B2 (ja) * | 2011-02-16 | 2015-09-30 | 日産自動車株式会社 | ナビゲーションシステム、情報提供装置及び運転支援装置 |
| JP6291737B2 (ja) * | 2013-07-17 | 2018-03-14 | 日産自動車株式会社 | 車両用走行制御装置及び隊列走行制御方法 |
| DE112014005122T5 (de) * | 2013-11-08 | 2016-08-11 | Honda Motor Co., Ltd. | Kolonnenfahrt-Steuervorrichtung |
| JP6198614B2 (ja) * | 2014-01-22 | 2017-09-20 | 三菱電機株式会社 | 走行支援装置、サーバ装置および走行支援システム |
| WO2016113890A1 (ja) * | 2015-01-16 | 2016-07-21 | 三菱電機株式会社 | 走行計画作成装置および走行計画変更方法 |
| WO2016113891A1 (ja) * | 2015-01-16 | 2016-07-21 | 三菱電機株式会社 | 走行計画作成装置および走行計画作成方法 |
| WO2016117311A1 (ja) * | 2015-01-22 | 2016-07-28 | パナソニックIpマネジメント株式会社 | 路側装置、サーバ装置、車載装置、隊列走行判定方法及び交通情報予測システム |
| JP6477391B2 (ja) * | 2015-09-25 | 2019-03-06 | 株式会社デンソー | グループ走行運用システム |
| WO2017148516A1 (en) * | 2016-03-03 | 2017-09-08 | Volvo Truck Corporation | A vehicle with autonomous driving capability |
| JP6765219B2 (ja) * | 2016-05-18 | 2020-10-07 | 本田技研工業株式会社 | 車両制御システム、通信システム、車両制御方法、および車両制御プログラム |
| WO2018043753A1 (ja) * | 2016-09-05 | 2018-03-08 | ナブテスコオートモーティブ 株式会社 | 隊列走行管理システム |
| US11014494B2 (en) | 2017-08-22 | 2021-05-25 | Sony Corporation | Information processing apparatus, information processing method, and mobile body |
| JP7087395B2 (ja) * | 2018-01-15 | 2022-06-21 | 株式会社デンソー | 車両用制御システム |
| JP7134649B2 (ja) * | 2018-03-08 | 2022-09-12 | 東芝デジタルソリューションズ株式会社 | 隊列走行運用システムおよび隊列走行運用方法 |
| US11614750B2 (en) | 2018-03-28 | 2023-03-28 | Nec Corporation | Self-propelled device, self-propelling method, and recording medium |
| JP6989429B2 (ja) * | 2018-03-28 | 2022-01-05 | 株式会社東芝 | 隊列走行運用システムおよび隊列走行運用方法 |
| JP2020035349A (ja) * | 2018-08-31 | 2020-03-05 | いすゞ自動車株式会社 | 隊列車両判定装置、車両および隊列車両判定方法 |
| JP6648227B1 (ja) * | 2018-09-21 | 2020-02-14 | Hapsモバイル株式会社 | システム及び管理装置 |
| JP7216512B2 (ja) * | 2018-09-25 | 2023-02-01 | 株式会社Subaru | 車両マッチングシステム |
| JP6617818B1 (ja) * | 2018-10-31 | 2019-12-11 | オムロン株式会社 | 情報処理装置、情報処理方法、及び情報処理プログラム |
| US10768638B2 (en) * | 2019-01-31 | 2020-09-08 | StradVision, Inc. | Method and device for switching driving modes to support subject vehicle to perform platoon driving without additional instructions from driver during driving |
| KR102118845B1 (ko) * | 2020-03-13 | 2020-06-29 | 김근배 | 플래투닝을 이용하여 물품을 유통하는 방법 및 이를 위한 장치 |
| JP7113056B2 (ja) * | 2020-10-13 | 2022-08-04 | ボルボトラックコーポレーション | 自律走行能力を有する車両 |
| CN113963561B (zh) * | 2021-11-15 | 2023-05-05 | 东莞理工学院 | 一种自主驾驶车群控制办法及通讯系统 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0795360B2 (ja) * | 1986-05-29 | 1995-10-11 | 住友電気工業株式会社 | 車間信号伝送システム |
| JPH10105895A (ja) * | 1996-09-30 | 1998-04-24 | Hitachi Ltd | 移動体制御方式 |
| JP3818722B2 (ja) * | 1997-03-21 | 2006-09-06 | 富士通テン株式会社 | 車両群形成制御装置 |
| JP2000055688A (ja) * | 1998-08-11 | 2000-02-25 | Kenwood Corp | 車載用ナビゲーション装置 |
| JP2003022497A (ja) * | 2001-07-09 | 2003-01-24 | Nec Corp | ツーリング・ナビゲーションシステム |
| JP2003115095A (ja) * | 2001-10-03 | 2003-04-18 | Denso Corp | 車群走行制御装置 |
| JP4082255B2 (ja) * | 2003-03-25 | 2008-04-30 | 株式会社デンソー | 車両用情報通信装置 |
-
2006
- 2006-06-20 JP JP2006169942A patent/JP4848855B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008003675A (ja) | 2008-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4848855B2 (ja) | 車載用隊列編成装置及び車両の隊列編成方法 | |
| EP1876418B1 (en) | Navigation system, route search server, route search method, and program | |
| EP2270432B1 (en) | Navigation device, route-search server, and route-search system | |
| JP3547300B2 (ja) | 情報交換システム | |
| US20100063720A1 (en) | Navigation apparatus | |
| JP4700383B2 (ja) | 走行支援装置、走行支援方法、プログラム、データ構造および記録媒体 | |
| US20150134180A1 (en) | Autonomous driving control apparatus and method using navigation technology | |
| JP2017206181A (ja) | 自動運転支援装置及びコンピュータプログラム | |
| JP2012160130A (ja) | タクシー情報提供システム及びタクシー情報提供方法 | |
| JP2019040235A (ja) | 中止地点管理システム、中止地点通知システム、中止地点案内システムおよび中止地点管理プログラム | |
| JP2013170877A (ja) | センター装置及びナビゲーションシステム | |
| WO2018109519A1 (ja) | 自動運転支援用の経路探索方法および装置 | |
| JP6723884B2 (ja) | 自動運転支援用の経路探索方法および装置 | |
| JP2007139507A (ja) | ナビゲーション装置、ナビゲーション方法、ナビゲーションシステム及び渋滞情報案内プログラム | |
| JP4365359B2 (ja) | ナビゲーションシステム、ナビゲーション装置およびナビゲーション装置における動作モード制御方法 | |
| US7096100B2 (en) | Vehicle-mounted apparatus and guidance system | |
| JP7234517B2 (ja) | 情報提供システム、車載装置、管理装置及びプログラム | |
| JP2008232956A (ja) | ナビゲーション装置およびナビゲーション方法 | |
| JP7424330B2 (ja) | 路面異常検出システム | |
| JP2017168038A (ja) | 通信システム、車載装置、サーバ装置、送信方法および通知方法 | |
| JP6198614B2 (ja) | 走行支援装置、サーバ装置および走行支援システム | |
| JPH10297446A (ja) | 情報提供システム及び情報提供センタ | |
| KR20170143250A (ko) | 자동 미러링 기능을 포함하는 내비게이션 장치와 그 방법이 구현된 컴퓨터로 판독 가능한 기록매체 | |
| CN111341132A (zh) | 用于车辆的引导设备、引导装置和方法及计算机程序产品 | |
| JP2006078405A (ja) | ナビゲーション装置、ナビゲーションシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090513 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110210 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110419 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110920 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111003 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4848855 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141028 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |