JP4835986B2 - 電動ステアリング制御装置 - Google Patents
電動ステアリング制御装置 Download PDFInfo
- Publication number
- JP4835986B2 JP4835986B2 JP2006165663A JP2006165663A JP4835986B2 JP 4835986 B2 JP4835986 B2 JP 4835986B2 JP 2006165663 A JP2006165663 A JP 2006165663A JP 2006165663 A JP2006165663 A JP 2006165663A JP 4835986 B2 JP4835986 B2 JP 4835986B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- steering
- acceleration operation
- vehicle
- torque steer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0472—Controlling the motor for damping vibrations
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
- Arrangement And Driving Of Transmission Devices (AREA)
Description
Mz=Tdrv・tan(θ/2) ---(1)
(2−a)「ドライブシャフトの特性による駆動力左右差」
ドライブシャフトDS1及びDS2に特性差がある場合には、トルク伝達に過渡的な(動的な)差異が生じる。ドライブシャフトDS1及びDS2が、同一材質、同一断面形状であっても、それらの長さが異なると、ドライブシャフトのねじり剛性は異なる。車両が急加速する場合、ドライブシャフト長が短くねじり剛性が高い側の車輪では駆動力が僅かな遅れで、速やかに立ち上がる。これに対し、ドライブシャフト長が長くねじり剛性が低い側の車輪では駆動力の立ち上がりは緩やかとなる。そのため、過渡的な駆動力に左右差が生じ、これによるトルクステア(過渡的なトルクステアという)が発生する。
トラクション制御によって、一方の車輪に制動トルクが加えられると、その制動トルクに相当する他方の車輪の駆動力が増加する。特に、路面摩擦係数が左右車輪間で異なる、所謂μスプリット路面において、トラクション制御が作動した場合には、駆動力の左右差が大きく発生する。
左右車輪間に駆動力配分装置を備える場合にも、駆動力の左右差が発生する。尚、駆動力配分装置には、電子制御によるものと、機械的に差動を制限するもの(例えば、ビスカスカップリング等)があり、例えば前掲の特許文献3に開示されている。
(B)加速操作量Apが大きいときには、トルクステア低減トルク目標値Ttsの最大値Ttsmを大きく設定して、トルクステア低減トルクをより大きく与えるようにすることができる。
(C)加速操作量Apが大きいときには、トルクステア低減トルク目標値Ttsの最大値Ttsmの保持時間Thldを長く設定して、トルクステア低減トルクを充分に与えるようにすることができる。
(D)加速操作量Apが大きいときには、トルクステア低減トルク目標値Ttsの減少勾配KTdwnを小さく設定して、トルクステア低減トルクを緩やかに立ち下げるようにすることができる。
(b)加速操作速度dApが大きいときには、トルクステア低減トルク目標値Ttsの最大値Ttsmを大きく設定して、トルクステア低減トルクをより大きく与えるようにすることができる。
(c)加速操作速度dApが大きいときには、トルクステア低減トルク目標値Ttsの最大値Ttsmの保持時間Thldを長く設定して、トルクステア低減トルクを充分に与えるようにすることができる。
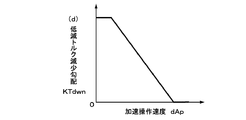
(d)加速操作速度dApが大きいときには、トルクステア低減トルク目標値Ttsの減少勾配KTdwnを小さく設定して、トルクステア低減トルクを緩やかに立ち下げるようにすることができる。
M2 パワーステアリング補助トルク目標値決定手段
M3 加速操作検出手段
M4 判定手段
M5 トルクステア低減トルク目標値決定手段
M6 モータ駆動制御手段
M7 変速機状態検出手段
M8 車両速度検出手段
ECU1 エンジン電子制御ユニット
ECU2 ステアリング電子制御ユニット
ECU3 変速機電子制御ユニット
ECU4 ブレーキ電子制御ユニット
SW ステアリングホイール
MT 電気モータ
EG エンジン
TR 変速機
WHfr,WHfl 車輪
AP アクセルペダルセンサ
TS 操舵トルクセンサ
TK スロットル開度センサ
Claims (6)
- 動力源が発生する動力を、ドライブシャフトを介して駆動車輪に伝達する車両における操向車輪が前記駆動車輪である当該車両に搭載し、当該車両のステアリングホイールの操舵トルクを制御する操舵トルク制御手段を備えた電動ステアリング制御装置において、運転者の加速操作を検出する加速操作検出手段を備え、前記操舵トルク制御手段は、前記加速操作検出手段が検出する加速操作量が所定値以上となったときに、前記ドライブシャフトの特性に起因して前記ステアリングホイールに過渡的に発生するトルクステアを低減させるトルクステア低減トルクを、パルス波形として決定し、該パルス波形のトルクステア低減トルクを前記ステアリングホイールに付与することを特徴とする電動ステアリング制御装置。
- 動力源が発生する動力を、ドライブシャフトを介して駆動車輪に伝達する車両における操向車輪が前記駆動車輪である当該車両に搭載し、当該車両のステアリングホイールの操舵トルクを制御する操舵トルク制御手段を備えた電動ステアリング制御装置において、運転者の加速操作を検出する加速操作検出手段を備え、前記操舵トルク制御手段は、前記車両の発進時に、前記加速操作検出手段が検出する加速操作量が所定値以上となったときに、前記ドライブシャフトの特性に起因して前記ステアリングホイールに過渡的に発生するトルクステアを低減させるトルクステア低減トルクを、パルス波形として決定し、該パルス波形のトルクステア低減トルクを前記ステアリングホイールに付与することを特徴とする電動ステアリング制御装置。
- 前記加速操作量の時間変化を演算する加速操作速度演算手段を備え、前記操舵トルク制御手段は、前記パルス波形の形状を前記加速操作量、及び前記加速操作速度演算手段が演算する加速操作速度のうちの少なくとも一方に応じて決定することを特徴とする請求項1又は2記載の電動ステアリング制御装置。
- 前記車両は前記動力源と前記ドライブシャフトの間に介装する変速機を備え、前記操舵トルク制御手段は、前記変速機の減速比が所定値より小さいときには、前記トルクステア低減トルクの付与を禁止することを特徴とする請求項1又は2記載の電動ステアリング制御装置。
- 前記車両の速度を検出する車両速度検出手段を備え、前記操舵トルク制御手段は、前記車両速度検出手段の検出する車両速度が所定値より大きいときには前記トルクステア低減トルクの付与を禁止することを特徴とする請求項1又は2記載の電動ステアリング制御装置。
- 前記操舵トルク制御手段は、前記トルクステア低減トルクの付与を、前記ステアリングホイールの右旋回方向及び左旋回方向のうちで、前記ドライブシャフトの特性によって予め定まる何れか一方向に限定して行うことを特徴とする請求項1又は2記載の電動ステアリング制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006165663A JP4835986B2 (ja) | 2006-06-15 | 2006-06-15 | 電動ステアリング制御装置 |
| US11/760,082 US7743874B2 (en) | 2006-06-15 | 2007-06-08 | Steering control apparatus for a vehicle |
| DE102007000320A DE102007000320B4 (de) | 2006-06-15 | 2007-06-12 | Lenkungssteuerungsgerät für ein Fahrzeug |
| CN2007101107684A CN101088829B (zh) | 2006-06-15 | 2007-06-13 | 车辆转向控制设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006165663A JP4835986B2 (ja) | 2006-06-15 | 2006-06-15 | 電動ステアリング制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007331565A JP2007331565A (ja) | 2007-12-27 |
| JP4835986B2 true JP4835986B2 (ja) | 2011-12-14 |
Family
ID=38862590
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006165663A Expired - Fee Related JP4835986B2 (ja) | 2006-06-15 | 2006-06-15 | 電動ステアリング制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7743874B2 (ja) |
| JP (1) | JP4835986B2 (ja) |
| CN (1) | CN101088829B (ja) |
| DE (1) | DE102007000320B4 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101317631B1 (ko) * | 2007-10-18 | 2013-10-10 | 스미토모 겐키 가부시키가이샤 | 선회구동제어장치 및 이것을 포함하는 건설기계 |
| WO2009094517A1 (en) * | 2008-01-25 | 2009-07-30 | Delphi Technologies, Inc. | Methods and systems involving torque |
| US7874564B2 (en) * | 2008-04-28 | 2011-01-25 | Honda Motor Co., Ltd. | Torque steer reduction system |
| EP2323890B1 (de) * | 2008-09-10 | 2012-09-05 | Continental Teves AG & Co. oHG | Verfahren zur lenkunterstützung bei notmanöver |
| US8831854B2 (en) * | 2010-08-16 | 2014-09-09 | Chrysler Group Llc | Active shimmy mitigation |
| US8589027B2 (en) * | 2010-12-02 | 2013-11-19 | Furuno Electric Company Limited | Steering assist system and method using autopilot device |
| WO2012155089A2 (en) | 2011-05-12 | 2012-11-15 | Saez Carlos A | Method and apparatus for variable reduced effort steering in electric steering systems |
| RU2571679C1 (ru) * | 2012-05-16 | 2015-12-20 | Ниссан Мотор Ко., Лтд. | Устройство управления рулением транспортного средства и способ управления рулением |
| AU2015339673A1 (en) * | 2014-10-31 | 2017-06-15 | Polaris Industries Inc. | System and method for controlling a vehicle |
| CN106697048B (zh) * | 2015-11-12 | 2019-05-03 | 株式会社万都 | 用于补偿扭矩转向的电子控制单元及方法 |
| JP6509378B2 (ja) * | 2015-12-28 | 2019-05-08 | 三菱電機株式会社 | 車両の操舵制御装置 |
| KR102532338B1 (ko) * | 2018-06-21 | 2023-05-16 | 현대자동차주식회사 | 차량용 조향 제어방법 |
| FR3083772B1 (fr) * | 2018-07-13 | 2020-08-28 | Jtekt Europe Sas | Detection progressive de l'apparition d'un phenomene de couple de tirage |
| CN109131540A (zh) * | 2018-08-28 | 2019-01-04 | 北京汽车股份有限公司 | 转向盘扭矩的补偿方法、装置及车辆 |
| EP3753807A1 (en) * | 2019-06-17 | 2020-12-23 | Volvo Car Corporation | Improved control of electrical power steering |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4509611A (en) * | 1983-10-13 | 1985-04-09 | General Motors Corporation | Adaptive controller for electric power steering |
| JPS60145968A (ja) * | 1983-12-29 | 1985-08-01 | 黒崎窯業株式会社 | 溶融金属容器の内張り目地充填材 |
| JPS60145966A (ja) * | 1984-01-07 | 1985-08-01 | トヨタ自動車株式会社 | セラミツク射出成形体の脱脂方法 |
| JPS62182873A (ja) * | 1986-02-05 | 1987-08-11 | Shin Nikkei Co Ltd | 建具作図システム |
| JPS6317177A (ja) * | 1986-07-09 | 1988-01-25 | Toyota Motor Corp | パワ−ステアリング装置 |
| JPS6391976A (ja) * | 1986-10-03 | 1988-04-22 | オムロン株式会社 | 端子台装置 |
| JP3046108B2 (ja) * | 1991-08-26 | 2000-05-29 | 富士重工業株式会社 | 差動制限装置付き車両の舵力制御方法 |
| JP3010838B2 (ja) | 1991-09-18 | 2000-02-21 | 三菱自動車工業株式会社 | 車両用左右駆動力配分装置 |
| JP3095961B2 (ja) * | 1994-10-04 | 2000-10-10 | 本田技研工業株式会社 | 車両用操舵装置の操舵反力制御装置 |
| US6032755A (en) * | 1996-01-30 | 2000-03-07 | Trw Inc. | Method and apparatus for compensating torque steer |
| JP3105847B2 (ja) | 1997-11-04 | 2000-11-06 | 本田技研工業株式会社 | 電動操舵車両の操向輪制御構造 |
| GB2369332A (en) * | 2000-11-22 | 2002-05-29 | Trw Lucasvarity Electric Steer | Compensation for motor inertia in electric power-assisted steering systems |
| US6909958B2 (en) * | 2003-05-12 | 2005-06-21 | Honda Giken Kogyo Kabushiki Kaisha | System and method for inhibiting torque steer |
| JP4300103B2 (ja) * | 2003-12-09 | 2009-07-22 | 株式会社日立製作所 | 車両の操舵制御装置 |
| JP4400270B2 (ja) * | 2004-03-19 | 2010-01-20 | 日産自動車株式会社 | 車両の舵角比制御装置 |
| US7532966B2 (en) * | 2004-08-20 | 2009-05-12 | General Motors Corporation | Torque steer compensation algorithm |
| JP4626290B2 (ja) * | 2004-12-14 | 2011-02-02 | 日産自動車株式会社 | 車両偏向抑止装置 |
| JP2007245768A (ja) * | 2006-03-13 | 2007-09-27 | Nissan Motor Co Ltd | ステアリング装置、自動車、及びステアリング制御方法 |
-
2006
- 2006-06-15 JP JP2006165663A patent/JP4835986B2/ja not_active Expired - Fee Related
-
2007
- 2007-06-08 US US11/760,082 patent/US7743874B2/en not_active Expired - Fee Related
- 2007-06-12 DE DE102007000320A patent/DE102007000320B4/de not_active Expired - Fee Related
- 2007-06-13 CN CN2007101107684A patent/CN101088829B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN101088829A (zh) | 2007-12-19 |
| JP2007331565A (ja) | 2007-12-27 |
| US20070294008A1 (en) | 2007-12-20 |
| US7743874B2 (en) | 2010-06-29 |
| DE102007000320A8 (de) | 2009-04-23 |
| DE102007000320A1 (de) | 2008-12-18 |
| DE102007000320B4 (de) | 2012-08-09 |
| CN101088829B (zh) | 2011-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4835986B2 (ja) | 電動ステアリング制御装置 | |
| US7970513B2 (en) | Steering control apparatus for a vehicle | |
| JP6162762B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| US7647149B2 (en) | Control device for electric power steering system of vehicle having wheel slip control system active on steered vehicle wheels | |
| US10272943B2 (en) | Control unit for vehicle and control method for vehicle | |
| US10689028B2 (en) | Control apparatus and method of motor-driven power steering system | |
| US20110259663A1 (en) | Steering apparatus for vehicle | |
| JP4853122B2 (ja) | 電動ステアリング制御装置 | |
| JP2017108485A (ja) | 車両の制御装置及び車両の制御方法 | |
| EP3656648B1 (en) | Apparatus and method for controlling steering system of vehicle | |
| JP2000085604A (ja) | 操舵制御装置 | |
| JP6329308B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP5454688B2 (ja) | 車両の左右輪駆動力配分制御装置 | |
| EP3056409B1 (en) | Torque steering mitigation for electric power steering | |
| US20120253622A1 (en) | Control device for controlling drive force that operates on vehicle | |
| JP2007331566A (ja) | 電動ステアリング制御装置 | |
| JP4910491B2 (ja) | 電動ステアリング制御装置 | |
| JP2007331569A (ja) | 電動ステアリング制御装置 | |
| JPH11268552A (ja) | 車両用旋回アシスト装置 | |
| JP5119691B2 (ja) | 操舵制御装置 | |
| JP5862516B2 (ja) | 車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110510 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110709 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110902 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110915 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141007 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |