以下、図面を用いて、本発明の光走査装置及び画像形成装置の好適な実施形態について説明する。
(第1の実施形態)
図1は、本発明の第1の実施形態に係るカラー画像形成装置を示す概略断面図である。
なお、この種のカラー画像形成装置では、通常、イエロー(Y)、マゼンタ(M)、シアン(C)及び黒(B)の各色成分毎に色分解された4種類の画像データと、Y、M、C及びBのそれぞれに対応して各色成分毎に画像を形成するさまざまな装置が4組利用されることから、以下の説明においては、各参照符号に、Y、M、C及びBを付加することで、色成分毎の画像データとそれぞれに対応する装置を識別する。図2以下の図面においても、同様である。
図1において、画像形成装置100は、色分解された色成分Y、M、C及びB毎に画像を形成する第1〜第4の画像形成部50Y、50M、50C及び50Bを有する。
各画像形成部50(Y、M、C及びB)は、後述するマルチビーム光走査装置1の第3の折り返しミラー37Y、37M、37C及び第1の折り返しミラー33Bを介して各色成分画像に対応するレーザビームL(Y、M、C及びB)が出射される位置に対応して、光走査装置1の下方に、50Y、50M、50C及び50Bの順で一列に配置されている。
各画像形成部50(Y、M、C及びB)の下方には、各画像形成部50(Y、M、C及びB)により形成された画像を搬送する搬送ベルト52が配置されている。
各画像形成部50(Y、M、C及びB)はそれぞれ、矢印の方向に回転可能に形成され、画像に対応する静電潜像が形成される、円筒ドラム状の感光体ドラム58(Y、M、C及びB)を有している。
各感光体ドラム58(Y、M、C及びB)の周囲には、周知の技術の帯電装置60(Y、M、C及びB)、現像装置62(Y、M、C及びB)、転写装置64(Y、M、C及びB)、クリーナ66(Y、M、C及びB)、及び、除電装置68(Y、M、C及びB)が、各感光体ドラム58(Y、M、C及びB)の回転方向に沿って順に配置されている。
なお、光走査装置1の各ミラー37Y、37M、37C及び33Bにより案内される感光体ドラム58上で副走査方向に1つ又は2つあるいは複数のビームとなる、1つ又は2本あるいはそれ以上の複数のビームLY、LM、LC及びLBはそれぞれ、各帯電装置60(Y、M、C及びB)と各現像装置62(Y、M、C及びB)との間に照射される。
搬送ベルト52の下方には、用紙P(記録媒体)を収容する用紙カセット70が配置されている。
用紙カセット70の一端に、用紙カセット70に収容されている用紙Pを、最上部から、1枚ずつ取り出す送り出しローラ72が配置されている。送り出しローラ72と搬送ベルト52との間には、レジストローラ74が配置されている。
第1の画像形成部50Yより用紙Pの搬送方向上流側に、用紙Pに、所定の静電吸着力を提供する吸着ローラ76が配置されている。
搬送ベルト52の画像形成部50の下流側に、搬送ベルト52あるいは搬送ベルト52により搬送される用紙P上に形成された画像の位置を検知するための一対のレジストレーションセンサ78及び80が配置されている(図1は、正面断面図であるから、後方のセンサ80のみが示されている)。
搬送ベルト52上には、搬送ベルト52上に付着したトナーあるいは用紙Pの紙かすなどを除去する搬送ベルトクリーナ82が配置されている。
搬送ベルト52より用紙Pの搬送方向下流側には、用紙Pに転写されたトナー像を用紙Pに定着する定着装置84が配置されている。
図2は、図1に示したカラー画像形成装置100に利用されるマルチビーム光走査装置1を示す概略平面図である。
図2において、マルチビーム光走査装置1は、光源としての半導体レーザから出射されたレーザビームを、所定の位置に配置された像面、すなわち、図1に示した感光体ドラム58Y、58M、58C及び58Bのそれぞれの所定の位置に向かって所定の線速度で偏向する偏向手段としてのただ1個の光偏向装置5を有している。なお、以下では、光偏向装置5によりレーザビームが偏向される方向を主走査方向と呼んでいる。
光偏向装置5は、複数(例えば、8面)の平面反射鏡(面)が正多角形状に配置された多面鏡本体(ポリゴンミラー)5aと、多面鏡本体5aを主走査方向に所定の速度で回転させるモータ(図3参照)とを有している。
光偏向装置5と像面との間には、光偏向装置5の反射面により所定の方向に偏向されたレーザビームに所定の光学特性を与える第1及び第2の結像レンズ(いわゆるfθレンズ)30a及び30bからなる2枚組みの偏向後光学系(結像光学系)30、この偏向後光学系30の第2の結像レンズ30bから出射された黒のレーザビームLBが、画像が書き込まれる領域より前の(上流側の)所定の位置に到達したことを検知するための1個の水平同期用センサ23、及び、偏向後光学系30と水平同期用センサ23との間に配置され、偏向後光学系30内の少なくとも1枚のレンズを通過した黒のレーザビームLBの一部を、水平同期用センサ23に向かって反射させるただ1個の水平同期用折り返しミラー25などが配置されている。
次に、光源としての半導体レーザと光偏向装置5との間の偏向前光学系について説明する。
光走査装置1は、色成分毎に色分解された画像データに対応するレーザビームを発生する半導体レーザ(光源)3(Y、M、C及びB)を有している。
ここで、黒用の半導体レーザ3Bは、2つの発光点を持つレーザアレイであり、他の色成分用の半導体レーザ3Y、3M、3Cは、1つの発光点のみ持つ半導体レーザである。すなわち、黒用の半導体レーザ3Bだけは、2本のレーザビームLB(2本のレーザビームを区別する必要があるときには符号LB1、LB2を用いる)を出射する。
各半導体レーザ3(Y、M、C及びB)と光偏向装置5との間には、それぞれの半導体レーザ3(Y、M、C及びB)からのレーザビームL(Y、M、C及びB)の断面ビームスポット形状を所定の形状に整えるなどする偏向前光学系が配置されている。
各色成分の半導体レーザ3(Y、M、C及びB)から出射された発散性のレーザビームL(Y、M、C及びB)は、有限焦点レンズ9(Y、M、C及びB)により所定の収束性が与えられた後、図示しない絞りにより、断面ビーム形状が所定の形状に整えられる。絞りを通過したレーザビームL(Y、M、C及びB)は、シリンダレンズ11(Y、M、C及びB)を介して、副走査方向に対してのみ、さらに所定の収束性が与えられ、その後、数枚のミラーを介して、又は、直接に、光偏向装置5に案内される。
イエローのシリンダレンズ11Yを通過したレーザビームLYは、第1〜第3のミラー12a〜12cで反射されない光路を通り、光偏向装置5に案内される。マゼンタのシリンダレンズ11Mを通過したレーザビームLMは、第1のミラー12aで反射された後、第2及び第3のミラー12b及び12cとは副走査方向にずれた位置を通過して光偏向装置5に案内される。シアンのシリンダレンズ11Cを通過したレーザビームLCは、第2のミラー12bで反射された後、第3のミラー12cとは副走査方向にずれた位置を通過して光偏向装置5に案内される。黒のシリンダレンズ11Bを通過したレーザビームLBは、第3のミラー12cで反射されて光偏向装置5に案内される。
図3は、光走査装置1の、光偏向装置5から各感光体ドラム58(Y、M、C及びB)までを、光偏向装置5の偏向角が0°の位置で副走査方向断面図として示している。
図3において、偏向後光学系30の第2の結像レンズ30bと像面との間には、第2の結像レンズ30bを通過した1色×2本+3色×1本のレーザビームL(Y、M、C及びB)を像面に向かって折り曲げる第1の折り返しミラー33(Y、M、C及びB)、第1の折り返しミラー33Y、33M及び33Cにより折り曲げられたレーザビームLY、LM及びLCを、さらに折り返す第2及び第3の折り返しミラー35Y、35M及び35C、並びに、37Y、37M及び37Cが配置されている。
光路上、黒用の第1の折り返しミラー33Bの手前であって、他の色成分の第2の折り返しミラー35Y、35M、35Cの後段の位置で、しかも、主走査方向の偏向の始端側には、黒用のレーザビームLBを、水平同期用センサ23に向かって反射させる水平同期用折り返しミラー25が配置されている。
水平同期用折り返しミラー25には、他の色成分用のレーザビームLY、LM、LCが到達せず、水平同期用センサ23に向かって他の色成分用のレーザビームLY、LM、LCを反射させることはない。例えば、他の色成分用の第1の折り返しミラー33Y、33M、33Cにおける、主走査方向の偏向の始端側を延ばして、この第1の折り返しミラー33Y、33M、33Cで、水平同期用折り返しミラー25に向かう、黒以外の色成分用のレーザビームLY、LM、LCを反射して水平同期用折り返しミラー25に到達しないようにしても良く、また、水平同期の検出タイミング前後で、黒以外の色成分用の半導体レーザ3Y、3M、3Cの発光を停止させることにより、黒以外の色成分用のレーザビームLY、LM、LCが水平同期用折り返しミラー25に到達しないようにしても良い。
水平同期用折り返しミラー25は、黒用のレーザビーム(2本のレーザビーム)LBだけを折り返すので1枚の平面ミラーを適用することができる。
図4は、図2に示す光走査装置1の水平同期用センサ23の検知部構成を示す概略平面図である。
水平同期用センサ23は、光電変換する検知部として、第1及び第2の主走査ビーム位置検知部23a及び23bと、副走査ビーム位置検知部23cとを有する。
第1及び第2の主走査ビーム位置検知部23a及び23bはそれぞれ、副走査方向に平行に伸びる棒状の光電検知部材で構成されており、第1及び第2の主走査ビーム位置検知部23a及び23b間の主走査方向の距離は、所定の長さ(例えば、倍率1で10ドット(画素)分)に選定されている。なお、第1の主走査ビーム位置検知部23aが、第2の主走査ビーム位置検知部23bに比較して、画像有効領域より遠い位置(より上流)に存在しているとする。
第1及び第2の主走査ビーム位置検知部23a及び23bの位置関係は正確であることが好ましく、そのため、例えば、1チップ上にモノリシックに形成されたものを使用する。副走査ビーム位置検知部23cも、同様にして1チップ上に形成する。
副走査ビーム位置検知部23cは、棒状の光電検知部材で構成されており、副走査ビーム位置検知部23cの一端が、第1の主走査ビーム位置検知部23aの副走査方向の上側の端部に近接し、副走査ビーム位置検知部23cの他端が、第2の主走査ビーム位置検知部23bの副走査方向の下側の端部に近接するように、主走査方向及び副走査方向に対し、斜めに配置されている。
すなわち、あるビームスポットが第1の主走査ビーム位置検知部23aで検知されてから副走査ビーム位置検知部23cで検知されるまでの時間と、副走査ビーム位置検知部23cで検知されてから第2の主走査ビーム位置検知部23bで検知されるまでの時間との関係により、そのレーザビームの副走査方向の位置を検出し得るようになされている。
図5は、レジストレーション補正に関する構成を説明するために、図1に示した画像形成装置の搬送ベルトの近傍を抜き出した概略斜視図である。
一対のレジストレーションセンサ78及び80は、搬送ベルト52の幅方向すなわち主走査方向Vに所定の間隔を置いて配置されている。なお、レジストレーションセンサ78及び80相互の中心を結ぶ線(仮想)は、好ましくは、画像形成部50Bの感光体ドラム58Bに、正確に平行に配置される。
レジストレーションセンサ78及び80はそれぞれ、搬送ベルト52の主走査方向の両端のそれぞれに書き込まれたレジストレーション測定用画像を読み取るものである。
なお、レジストレーション測定用画像の書込みについては、後述する処理回路における処理手順で説明するが、図5に示すように、主走査方向の各端部(主走査方向の画像領域外の領域)のそれぞれに、黒成分(B)については2個の模様が書き込まれ、他の色成分(Y、C、M)について1個の模様が書き込まれる。
図6は、レジストレーションセンサ78及び80の概略断面図である(センサ78及び80は実質的に同一構成であるのでセンサ78を代表して示している)。
レジストレーションセンサ78は、ハウジング78a、ハウジング78aの所定の位置に配置され、搬送ベルト52上の画像に所定の波長(少なくとも450、550及び600nm近傍の波長)を含む光を照射する参照光光源78b、参照光光源78bから出射された光を搬送ベルト52上の画像上に集光させると共に、画像から反射された光を後述のフォトセンサ78dに結像させる凸レンズ78c、及び、凸レンズ78cにより集光された画像からの反射光を検知して電気信号に変換するフォトセンサ(受光部)78dなどを含んでいる。フォトセンサ(受光部)78dは、例えば、7μm×7μm程度の受光面を有する。すなわち、フォトセンサ(受光郡)78dは、図6にハツチングで示した極小のセンサであって、主走査方向に極小の幅のデータを読み取るものである。
なお、光源78bからの光の上述した波長は、シアン(C)、イエロー(Y)及びマゼンタ(M)の各トナーの吸収スペクトラム分布のピーク波長であり、各トナーに対する検出感度を維持するために確保される。また、凸レンズ78cの横倍率は−1である。
図7は、図1に示した画像形成装置100の画像形成動作を制御する処理回路の概略ブロック図である。図7は、主走査方向の画像形成時のタイミング制御に必要な情報を得るという観点から、光走査装置に関係する部分のみ図示している。
処理回路は、後述する図8に示す手順に従って、黒用潜像を形成する2レーザビームのビーム間隔制御や、黒用レジストレーションと、イエロー、マゼンタ、シアンのカラー用レジストレーションなどを行っている。なお、図7で、点線は、潜像同士の相対位置を合わせるためのモードでのデータの流れを示している。実線は、画像書き込みの際のデータの流れを示している。
画像形成装置100は、各色成分に対応するデータ制御部115Y、115M、115C、並びに、115B1及び115B2にバスラインを介して相互に接続されている画像データ制御部110を有している。
この第1の実施形態の画像形成装置は、例えば、人間の視感度特性が他の色成分より高感度である黒成分については、少なくとも副走査方向の解像度を倍にすることもできる転写モードを有しており(例えば、黒成分が1200dpiであれば他の色成分は600dpi)、この倍の解像度を、黒成分のみ2レーザビームを適用することで実現する。すなわち、黒成分のみ他の成分の2倍のレーザビームを発光させている。
そのため、データ制御部としても、黒成分のみ2個のデータ制御部115B1及び115B2が設けられている。
画像データ制御部110は、画像制御CPUや主制御CPUを中心として構成されているものである。画像データ制御部110は、光走査装置以外の画像形成装置100の機械要素の動作や、電気的要素に印加される電圧値又は電流量なども制御する。
画像データ制御部110は、黒成分については、例えば、奇数ラインの黒画像データをデータ制御部115B1に与え、偶数ラインの黒画像データをデータ制御部115B1に与える。
各データ制御部115(Y、M、C、B1及びB2)は、画像メモリや、遅延時間データ保持部などを内蔵し、入力された画像データを、動作説明で後述する遅延時間だけ遅延させたタイミングで、かつ、対応する画像クロック発生部119(Y、M、C及びB)が発生した画像クロックに基づいて、対応するレーザ駆動部116(Y、M、C、B1及びB2)に与えるものである。
各画像クロック発生部119(Y、M、C及びB)は、例えば、VCO(電圧制御型発振器)で構成されており、画像クロックの周波数を、例えば、数%の範囲で可変し得るものである。なお、黒成分に係る第1及び第2のレーザビームLB1及びLB2を出射させるべく、黒成分に関し、2個のデータ制御部115B1及び115B2が設けられているが、画像クロック発生部としては、両データ制御部115B1及び115B2に共通の周波数を提供し、位相のみ独立に制御可能な画像クロック発生部119Bが設けられている。
各レーザ駆動部116(Y、M、C、B1及びB2)は、入力された画像データに応じて、半導体レーザ(半導体レーザチップ)3(Y、M、C、B1及びB2)を駆動するものである。なお、上述したように、黒成分に係る2個の半導体レーザチップ3B1及び3B2は、1個の素子として構成されている。
水平同期用センサ23における一方の主走査ビーム位置検知部23b(23aでも良い)の出力は、全てのデータ制御部115(Y、M、C、B1及びB2)に水平同期基準として与えられるようになされている。
水平同期用センサ23における第1及び第2の主走査ビーム位置検知部23a及び23bの出力は、ビーム相対位置制御部121に与えられるようになされている。
ビーム相対位置制御部121は、黒成分の2個のレーザビームの主走査方向での相対位置の情報を得るものであり、その情報は、黒用のデータ制御部115B1及び115B2に与えられるようになされている。
なお、信号線は省略しているが、水平同期用センサ23の出力(第1及び第2の主走査ビーム位置検知部23a及び23bの出力や、副走査ビーム位置検知部23cの出力)は、画像データ制御部110に与えられ、副走査方向の位置制御などに利用されるようになされている。第1の実施形態の特徴は、主走査方向のタイミング制御にあるため、副走査方向のタイミング制御に関しては、図7では、適宜省略している。
2個のレジストレーションセンサ78及び80の出力は、レジストレーション相対位置演算部117に与えられる。レジストレーション相対位置演算部117は、同一水平走査線での2個のセンサ出力の相対位置を得るものであり、この出力は、レジストレーション制御部118に与えられる。
レジストレーション制御部118は、レジストレーション測定用画像データ保持部を内蔵し、レジストレーション測定用画像データを画像データ制御部110に引き渡してレジストレーション測定用画像を搬送ベルト52に転写させると共に、レジストレーション相対位置演算部117からの出力などに基づき、レジストレーション補正情報を形成するものである。レジストレーション制御部118は、一部のレジストレーション補正情報(例えば、クロック周波数)は、画像クロック発生部119(Y、M、C及びB)に与え、また、他のレジストレーション補正情報(例えば、主走査方向の横ずれ量を補償するための遅延時間)は、データ制御部115(Y、M、C、B1及びB2)に与えて、データ制御部115(Y、M、C、B1及びB2)からの画像データの出カタイミンクなどを調整させる。
次に、第1の実施形態の画像形成装置100による主走査方向のタイミング制御に関係する動作を説明する。
画像形成装置100は、搬送ベルト52を介して搬送されている用紙P上に画像を形成する画像形成(通常)モード、及び、搬送ベルト52上に直接画像を形成するレジストレーション補正(調整)モード、場合によっては、さらに、黒マルチビームの入射順序判断だけを行うモードの2つ若しくは3つのモードで動作可能である。
一般的には、図8に示すように、レジストレーション補正モードの処理(S1〜S3)を行った後、画像形成モードでの画像書き込み処理(S4)に移行する。
この第1の実施形態の場合、レジストレーション補正モードの処理は、図8に示すように、黒マルチビームの入射順序の判断処理(S1)、黒マルチビームの倍率、主走査方向位置の調整処理(S2)、カラー用ビームの倍率、主走査方向位置の調整処理(S3)からなる。
図9は、黒マルチビームの入射順序の判断処理(S1)の詳細を示している。なお、この黒マルチビームの入射順序の判断処理では、他の色成分のレーザビームが出射されることはない。
まず、ビーム位置検知領域にて、黒用の第1及び第2のレーザビームLB1及びLB2を半導体レーザ3B1及び3B2より出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TK0で(黒用の第1及び第2のレーザビームLB1及びLB2のいずれを検知したかは問われない)、第2のレーザビームLB2の出射を停止し、時点TK0から、第1のレーザビームLB1が水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTK1を計測する(S10)。
次に、ビーム位置検知領域にて、黒用の第1及び第2のレーザビームLB1及びLB2を半導体レーザ3B1及び3B2より出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TK0で(黒用の第1及び第2のレーザビームLB1及びLB2のいずれを検知したかは問われない)、第1のレーザビームLB1の出射を停止し、時点TK0から、第2のレーザビ−ムLB2が水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTK2を計測する(S11)。
そして、計測された2つの時間ΔTK1及びΔTK2を比較し、黒用の第1及び第2のレーザビームLB1及びLB2のいずれが、水平同期用センサ23における第2の主走査ビーム位置検知部23bに先に到達するかを判断する(S12)。
例えば、第1のレーザビームLB1が、図10に示すように、第2のレーザビームLB2に比較して主走査方向に進んでいる場合であれば、処理S10による時間ΔTK1は、第1のレーザビームLB1が第1及び第2の主走査ビーム位置検知部23a及び23b間を移動する時間となり、処理S11による時間ΔTK2は、第2のレーザビームLB2が図10に示す位置から第2の主走査ビーム位置検知部23bまでを移動する時間となり、時間ΔTK1の方が短い。同様に、第2のレーザビームLB2が、第1のレーザビームLB1に比較して主走査方向に進んでいる場合であれば、時間ΔTK2の方が短くなる。従って、先行するレーザビームLB1又はLB2を、時間ΔTK1及びΔTK2の比較により特定することができる。
なお、以下の第1の実施形態の説明では、適宜、主走査方向に進んでいる方の黒レーザビームを先行黒レーザビームと呼び、主走査方向に遅れている方の黒レーザビームを後続黒レーザビームと呼ぶ。
図11は、黒マルチビームの倍率、主走査方向位置の調整処理の詳細を示している。
まず、ビーム位置検知領域にて、先行黒レーザビームをそれ用の半導体レーザ3B1又は3B2から出射させ、他のレーザビーム(後続黒レーザビーム、及び、他の色成分のレーザビーム)の出射を停止し、先行黒レーザビームが水平同期用センサ23における第1の主走査ビーム位置検知部23aを通過する基準時間を計測し、また、後続黒レーザビームをそれ用の半導体レーザ3B2又は3B1から出射させ、他のレーザビーム(先行黒レーザビーム、及び、他の色成分のレ−ザビーム)の出射を停止し、後続黒レーザビームが水平同期用センサ23における第1の主走査ビーム位置検知部23aを通過する基準時間を計測し、そして、先行黒レーザビーム及び後続黒レーザビームにより、それぞれの基準時間から、前回(又は初期)の設定マージンΔTK0後に、レジストレーション測定用画像の書込みを実行させる(S20)。
また、ビーム位置検知領域にて、先行黒レーザビームをそれ用の半導体レーザ3B1又は3B2から出射させ、他のレーザビーム(後続黒レーザビーム、及び、他の色成分のレーザビーム)の出射を停止し、先行黒レーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bを通過する基準時間を計測し、また、後続黒レーザビームをそれ用の半導体レーザ3B2又は3B1から出射させ、他のレーザビーム(先行黒レーザビーム、及び、他の色成分のレーザビーム)の出射を停止し、後続黒レーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bを通過する基準時間を計測し、そして、先行黒レーザビーム及び後続黒レーザビームにより、それぞれの基準時間から、前回(又は初期)の設定マージンΔTK0後に、レジストレーション測定用画像の書込みを実行させる(S21)。
これにより、図5に例示したように、黒成分(B)については、上流側及び下流側のそれぞれに、レジストレーション測定用画像として2個の模様が書き込まれ、一方の模様は、第1の主走査ビーム位置検知部23aの位置を基準に書き込まれ、他方の模様は、第2の主走査ビーム位置検知部23bの位置を基準に書き込まれる。
なお、レジストレーション補正モードは、機器の電源投入時や、所定の印字枚数毎、又は、温度変化が所定の量以上になった時点で行われ、このモードでは、カセット70から用紙Pを給送する送り出しローラ72及び定着装置84は停止され、搬送ベルト52への書込みが実行される。
図12は、主走査方向の上流側(下流側も同様)における黒成分についての2個の模様例を示す概略平面図である。
図12において、第1の模様RB1は、第1の主走査ビーム位置検知部23aの位置を基準に書き込まれたものであり、第2の模様RB2は、第2の主走査ビーム位置検知部23bの位置を基準に書き込まれたものである。各模様RB1、RB2はそれぞれ、主走査方向に伸びる模様部分RB1a、RB2aと、その模様部分RB1a、RB2aに対して鋭角の角度を有する模様部分RB1b、RB2bとからなっている。なお、図12における副走査方向に伸びる直線SLは、模様を構成しているものではなく、参考のために、レジストレーションセンサ78(又は80)が読み取っていく位置を示している。
なお、レジストレーションセンサ78(又は80)の出力から得た模様RB1やRB2に関する距離DB1やDB2から、主走査方向の倍率ずれや横ずれを検出可能である。
レジストレーション測定用画像の書込みが終了すると、2個のレジストレーションセンサ78及び80での読み取りの時間差などを得、この時間差に基づいて、第1及び第2のレーザビームLB1、LB2の主走査方向でのずれ倍率や、主走査方向での横ずれ量を演算し、ずれ倍率に対応した画像クロック周波数を得ると共に、主走査方向での横ずれ量に対応した時間に上述した設定マージンΔTK0を更新させる(S22)。
そして、黒成分の画像クロック発生部119Bに新たな画像クロック周波数を設定させ(S23)、また、黒成分のデータ制御部115B1、115B2における遅延時間データ保持部に更新された設定マージンΔTK0を保持させる(S24)。
以下、主走査方向でのずれ倍率や、主走査方向での横ずれ量などの演算方法の一例を説明する。
図13は、主走査方向倍率と、書き出されたレジストレーション測定用画像との関係を示す概略平面図である。
水平同期用センサ23における第1及び第2の主走査ビーム位置検知部23a及び23bを通過するタイミングを基準として、副走査方向1ドットにつき、主走査方向を1ドットずつずらして書き出した(主走査方向倍率1時)の2個の模様(レジストレーション測定用画像)R1a及びR1bは、同一水平ラインについては、第1及び第2の主走査ビーム位置検知部23a及び23b間の距離(図13では10ドット分としている)だけ離れ、副走査方向にも、それと同じ長さだけ離れている。
仮に、主走査方向の倍率が1.5に変化したとすると、第1及び第2の主走査ビーム位置検知部23a及び23bを通過するタイミングを基準として、書き出した2個の模様(レジストレーション測定用画像)は、図13に白抜きドットで表した模様R1.5a及びR1.5bに変化する。主走査方向の倍率が1.5のときの2個の模様R1.5a及びR1.5bは、主走査方向の距離は、主走査方向の倍率が1のときと同様であるが、副走査方向の距離は、主走査方向の倍率が1のときの長さの2/3(=1÷1.5)となる。
これらのことから、第1及び第2の主走査ビーム位置検知部23a及び23bを通過するタイミングを基準として、書き出した2個の模様の副走査方向の距離は、主走査方向の倍率に応じていることが分かる。副走査方向の距離は、レジストレーションセンサ78又は80の出力により捉えることができる。
以下、数値を使って、主走査方向の倍率などを演算する方法を説明する。
副走査方向のドット位置は、走査毎に、その解像度で決められる距離pだけ移動する。一方、主走査方向については、走査線の設計速度vs0で距離pだけ進む時間Δt=p/Vs0の時間を1周期とする、画像周波数1/Δtの画像クロックに対し、副走査が1つ進む毎に、α×Δtだけずらした時間の時に半導体レーザ3B1及び3B2をオンし、レジストレーション測定用画像を書き込むものとする(αは主走査方向の倍率であって図13の例では基本的にはα=1)。
ここで、主走査方向をy、副走査方向をzと置き、y0、z0を画像開始点とすると、副走査方向の位置zはL×p+z0で表され、主走査方向の位置yはvs0×L×α×Δt+y0で表される。なお、Lは、レジストレーション測定用画像の模様におけるドットの順番を表す整数である。
第1及び第2の主走査ビーム位置検知部23a及び23bを通過するタイミングを基準として、画像を書くと、各位置は、(1)式及び(2)式で表される。
z1=L×p+z10 z2=L×p+z20 (1)
y1=vs0×L×α×Δt+y10
y2=vs0×L×α×Δt+y20 (2)
これらの(1)式及び(2)式から、Lを消去すると、(3)式が得られる。そして、(3)式を適用して、所定のyの位置(所定の主走査方向の位置)ymでのZ方向(副走査方向)の間隔を求めると、(4)式が得られる。
z1−z10=(y1−y10)×p/vs0×α×Δt
z2−z20=(y2−y20)×p/vs0×α×Δt
(3)
z2−z1
=(ym−y20)×p/vs0×α×Δt+z20
−(ym−y10)×p/vs0×α×Δt−z10
=(y10−y20)×p/vs0×α×Δt
+(z20−z10) (4)
仮に、温度の影響で、偏向後光学系に熱膨張や屈折率変化が起こったり、光源である半導体レーザに波長変化が起こったり、あるいは、偏向後光学系と像面との間の距離が変わったりして、レーザビームの走査速度がβ倍になると、すなわち、vs=β×vs0となると、(4)式の代わりに、(5)式が成立する。
z2−z1
=(y10−y20)×p/β×vs0×α×Δt
+(z20−z10) (5)
(5)式を本来の式である(4)式に合致させるためには、(5)式のΔtをΔt/βに置き換えれば良いことが分かる。言い換えると、画像クロックの周期をΔtからΔt/βに変更すれば良いことが分かる。
(5)式の右辺から(4)式の右辺を引くと、設計値に対し、(6)式に示す距離δzだけずれてしまうことが分かる。
δz=(y10−y20)×p/β×vs0×α×Δt
−(y10−y20)×p/vs0×α×Δt
=(1/β−1)×(y10−y20)×p
/vs0×α×Δt (6)
この距離δzを、転写ベルト上の速度をvpとして、時間δtに直すと、(7)式が得られる。但し、(7)式は、上述したΔt=p/vs0の関係も利用して整理している。
δt=δz/vp
=(1/β−1)×(y10−y20)×p
/vp×vs0×α×Δt
=(1/β−1)×(y10−y20)/vp×α (7)
この(7)式を1/βについて解くと、下記の(8)式が得られ、所定のy方向、すなわち、主走査方向位置の一点で、このパターンが通過する時間の設計値とのずれδtが分かれば、画像クロックの一周期の時間を、(8)式で求められる倍率(1/β)倍すれば良いことが分かる(画像クロックの周波数としては、(8)式の逆数倍、すなわち、β倍すれば良い)。
1/β=vp×α/(y10−y20)+1 (8)
(8)式から明らかなように、時間δtは、主走査方向の位置(ym)に依存しないため、レジストレーションセンサ78及び80の位置が不正確でも、正確に、倍率を計測することができる。
実際のレジストレーション測定用画像は、同じ副走査方向位置では、異なる検知位置(第1及び第2の主走査ビーム位置検知部23a及び23bの位置)で光線を検知したタイミングを基準とした画像を書き込めないため、始めに、第1の主走査ビーム位置検知部23aを光線が通過した時点を基準としたレジストレーション測定用画像を書き込み、その次に、第2の主走査ビーム位置検知部23bを光線が通過した時点を基準とした、レジストレーション測定用画像を書き込む。その結果、上述した図12に示すような模様RB1、RB2が書き込まれる。
走査線の傾き量は、図12における本来ならば主走査方向にまっすぐ伸びる模様部分RB1a、RB2aのパターンを、主走査方向の上流、下流側で作像し、2箇所のレジストレーションセンサ78及び80で測定し、その検知時間のずれから測定する。
また、副走査方向のタイミングずれも、図12における主走査方向にまっすぐ伸びる模様部分RBla、RB2aのパターンの読み取りタイミングから検知できる。
主走査方向の横ずれ量は、図12における主走査方向及び副走査方向に傾いている模様部分RB1b、RB2bのパターンを、主走査方向の上流、下流側で測定して求めることができる。
図14は、図8におけるカラー用ビームの倍率、主走査方向位置の調整処理の詳細を示している。
まず、ビーム位置検知領域にて、先行黒レーザビームをそれ用の半導体レーザ3B1又は3B2から出射させ、他のレーザビーム(後続黒レーザビーム、及び、他の色成分のレーザビーム)の出射を停止し、水平同期用センサ23における第1の主走査ビーム位置検知部23aが先行黒レーザビームを検知した時点から、前回(又は初期)の設定マージンΔTY0、ΔTM0、ΔTC0後に、イエロー用レーザビーム、マゼンタ用レーザビーム、シアン用レーザビームによって、各色用のレジストレーション測定用画像を書込む(S30)。
なお、先行黒レーザビームは、水平同期用センサ23における第1の主走査ビーム位置検知部23aで検知された時点で出射が停止される。また、各色用のレジストレーション測定用画像として、例えば、図12に示した模様RB1と同様なものを書き込む。
そして、2個のレジストレーションセンサ78及び80での読み取りの時間差を得、この時間差に基づいて、イエロー用レーザビーム、マゼンタ用レーザビーム、シアン用レーザビームの主走査方向でのずれ倍率や、主走査方向での横ずれ量を演算し、ずれ倍率に対応した画像クロック周波数を得ると共に、主走査方向での横ずれ量に対応した時間に上述した設定マージンΔTY0、ΔTM0、ΔTC0を更新させる(S31)。
そして、イエロー用、マゼンタ用、シアン用の画像クロック発生部119Y、119M、119Cに新たな画像クロック周波数を設定させ(S32)、また、イエロー用、マゼンタ用、シアン用のデータ制御部115Y、115M、115Cにおける遅延時間データ保持部に更新された設定マージンΔTY0、ΔTM0、ΔTC0を保持させる(S33)。
以上のように、イエロー用、マゼンタ用、シアン用のレジストレーション測定用画像も、先行黒レーザビームを第1の主走査ビーム位置検知部23aが検知した時点を基準に書き込まれる。
以上のようなレジストレーション補正モード(図8のS1〜S3)の処理後に移行される、画像形成モードでの処理(画像書き込み)では、図15に示すようなタイミング制御を行う。
黒用やカラー用の画像クロックの周波数は、上述したレジストレーション補正モードで決定されたものに設定する(S40)。
ビーム位置検知領域にて、先行黒レーザビームを出射させ、他のレーザビームの出射を停止し、先行黒レーザビームを水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点で、先行黒レーザビームの出射を停止し、後続黒レーザビームを出射させ、そして、先行黒レーザビーム、イエロー用レーザビーム、マゼンタ用レーザビーム、シアン用レーザビームはそれぞれ、検知時点から設定マージンΔTK0、ΔTY0、ΔTM0、ΔTC0後に画像を書き込み、後続黒レーザビームは、それが第1の主走査ビーム位置検知部23aで検知された時点から設定マージンΔTK0後に画像を書き込む(S41)。
以上のように、第1の実施形態においては、カラー用レーザビームに関しては、先行黒レーザビームの水平同期タイミングを基準に画像書き込みが実行される。また、先行黒レーザビーム及び後続黒レーザビームに関しては、それぞれ、自己の水平同期タイミングを基準に画像書き込みが実行される。
第1の実施形態の光走査装置及び画像形成装置によれば、以下の効果を奏することができる。
第1の実施形態によれば、黒用のレーザビームだけを水平同期用センサに到達させる構成としたので、同じ偏向後光学系を用いた場合には、画像有効画角(領域)を従来より広くとることができ、又は、同じ画像有効画角(領域)を確保するには、実質的に性能を確保しなければいけない偏向角を従来に比べ小さくでき、結像用の光学素子や多面鏡本体(回転多面鏡)の寸法を小さくすることができる。
また、第1の実施形態によれば、図16に示すように、主走査方向の画像領域外の領域としては、黒用のレーザビームを水平同期用センサに導く分だけが必要であり、光偏向装置の多面鏡本体による偏向角を小さくすることができる。
又は、偏向角を従来と同様にしたならば、その偏向角における本来の画像形成に供する角度を大きくとることができる。
偏向角を小さくした場合には、結像光学素子として性能を確保しなければいけない領域も小さくなり、全体での結像特性等の確保が容易になると共に、結像用の光学素子や多面鏡本体の寸法も小さくできる。
第1の実施形態のように、黒用のレーザビームだけを水平同期用センサに導き、他の色成分についても、黒用のレーザビームを水平同期用センサが検知した時点を基準として、画像形成を行っても、実際上問題となることはない。
すなわち、複数のレーザビームで1つの像を形成する場合(第1の実施形態における黒用の2個のレーザビームによる黒画像を形成する場合に相当)、レーザビーム間の相対位置が10μmより大きいと、副走査方向の直線のぎざぎざが、人の目で感じられることが感応試験より分かった。これに対して、色成分が異なる像同士を重ね合わせてカラーの画像を形成した際、各色成分の画像同士のずれ量が85μmより大きいと、色ずれとしての許容範囲を超えるということが感応試験より分かっている。
このため、1つの潜像(黒用の像)を形成する複数レーザビームのビーム間ピッチずれを10μm以下、異なる潜像を形成するビーム同士の位置ずれは、85μm以下とする必要がある。
第1の実施形態によれば、同一画像を形成する黒用の2個のレーザビームはそれぞれ、水平同期用センサに検知させ、その検知時点を基準として画像形成させるので、ビーム間ピッチずれを10μm以下に抑えることができる。他の色成分については、黒用のレーザビームを水平同期用センサが検知した時点を基準として、画像形成しているが、黒用のレーザビームとその色成分のレーザビームとの位置ずれは85μmまで許容されているので、レジストレーションセンサでの読み取り時間差に基づく制御により、この精度を容易に達成することができる。
実際上、1つの偏向面(又は、一体に加工された偏向面)にて、複数の光線を偏向する場合には(十分に偏向面の平面度がでていれば)、複数ビームの相対位置は、面毎に変動することはなく、これにより、上記の画像書き込み処理により、許容ビーム間ピッチを実現できる。
ただし、黒用のビームで、センサへの入射順序がひんぱんに入れかわる可能性のあるような場合(LDや有限レンズの熱変形などの影響でこのようなことも起こり得る)、処理S1の黒マルチビーム入射順序判断は、紙間のタイミング毎に行い、先行ビームを紙間毎に定義し直しても良い。
なお、レジストレーション補正モードの処理においては、多面鏡本体を1回転させ、各偏向面でのレジストレーション補正情報の平均などによって、保持しておくレジストレーション補正情報を得るようにしても良い。
1つの色成分の潜像を、複数のビームで書き込む光線についても、主走査方向の画像領域外で、全てのレーザビームのタイミングを測定せず、副走査方向の画像領域外で測定して保持しておくようにしても良い(後述する第2の実施形態参照)。
上記第1の実施形態によれば、黒マルチビームの倍率、主走査方向位置の調整処理をカラー用ビームの倍率、主走査方向位置の調整処理に先駆けて行っているので、これを基準として、カラー用ビームの倍率、主走査方向位置の調整を適切に行うことができる。
基準となっている黒用のレーザビームに関しても、レジストレーションデータ取得時に、倍率、位置ずれ等があることが分かれば、これを補正しておく必要があるが、仮に、カラー用ビームの倍率、主走査方向位置の調整を、黒マルチビームの倍率、主走査方向位置の調整より先に行った場合には、カラー用ビームの倍率、主走査方向位置の調整時に出射されている黒マルチビームの倍率、主走査方向位置が適切でないことも生じており、カラー用ビームの倍率、主走査方向位置の調整も正しくなされないことになる。
図8は、主走査方向の倍率、位置の調整の面から処理を書き出したが、他の調整も、含めた順序を記述すれば、以下の順序が好ましい。すなわち、基準ビームを含む光線群に対し、倍率補正、主/副走査方向位置ずれ補正、走査線傾き補正を行い、その後で、他ビームの倍率補正、主/副走査方向位置ずれ補正、走査線傾き補正を行うことが好ましい。
また、黒用の2個のレーザビームは、共通な画像クロックにより出射制御されるので、この点でも、ビーム間ピッチずれを10μm以下に抑えることができる。
さらに、第1の実施形態によれば、水平同期用センサとして、主走査方向に所定距離だけ離間している2個の主走査ビーム位置検知部23a及び23bを有するものを適用し、黒用のレジストレーション測定用画像として、主走査方向にMドット移動するとき副走査方向にNドット移動する内容のものを適用し、一方の主走査ビーム位置検知部23aが検知した時点を基準としたものと、他方の主走査ビーム位置検知部23bが検知した時点を基準としたものの2画像を書き込み、そのレジストレーション測定用画像をレジストレーションセンサ78及び80が読み取ったデータに基づき、上述した演算によって、主走査方向の倍率ずれを得るようにしたので、レジストレーションセンサ78及び80の取り付け位置の精度が低くても、主走査方向の倍率ずれを高精度に検出することができる。
偏向後光学系による感光体ドラム上への露光の主走査方向に関し、(I)温度変化によりレーザビームの波長がずれ、主走査方向の倍率がずれたり、(II)光学部品、ハウジング、装置内位置決め部品等の熱膨張により主走査方向の倍率がずれたり、(III)感光体ドラムの交換等により光学素子とドラム間ピッチがずれ、主走査方向の倍率がずれたりしてしまう。この主走査方向の倍率ずれは、水平同期用センサの位置を基準として、全域でほぼ同じ割合で起こる。
従来の2個のレジストレーションセンサの出力により、主走査方向の倍率を測定して、それを画像クロックにより補正する方法では、レジストレーションセンサ間隔が、初期にずれてしまっていたり、途中からずれてしまったりすると、測定される主走査方向倍率が、正しいものでなくなってしまってしまい、(I)〜(III)の要因で実際にずれが発生しているのか、それともレジストレーションセンサ位置がずれているのかを見分けることができず、かえってずれた倍率にすることもあった。
一方、第1の実施形態では、レジストレーションセンサの取り付け位置(の精度)を問題とすることなく、主走査方向の倍率ずれを検出できるので、(I)〜(III)の要因による主走査方向の倍率ずれを検出でき、その倍率ずれを適切に補償することができる。
(第2の実施形態)
次に、図面を用いて、本発明の光走査装置及び画像形成装置の第2の実施形態について、第1の実施形態との相違点を中心に説明する。
第2の実施形態に係る転写型カラー画像形成装置の全体構成(図1参照)や、光走査装置の構成(図2及び図3参照)や、水平同期用センサの詳細構成(図4参照)や、レジストレーションセンサの内部構成(図6参照)や、画像形成動作を制御する処理回路(図7参照)などは、第1の実施形態と同様である。
第2の実施形態は、レジストレーション補正モードの処理や画像形成モードでのタイミング設定処理の内容などが、第1の実施形態とは異なっている。なお、第1の実施形態では、全ての黒マルチビームの書き出しタイミングは、常に、水平同期センサの信号を元に決められていたが、第2の実施形態では、画像領域外で、黒マルチビームの相対的なタイミングを計測し、画像形成中には、黒マルチビームの一番先行するビームが水平同期センサに入る時間のみを検知し、他のビームは画像領域外で計測された相対的なタイミングと、黒マルチビームの中の一番先行するビームが水平同期センサに入る時間から動作タイミングが決定される。
図17は、第2の実施形態でレジストレーション補正モードの処理を実行するタイミングを説明する図面である。
感光体ドラム面を副走査方向に無限の長さの平面と仮定した被転写媒体(被走査面)の場合、図17のイメージ図に示すように、主走査方向及び副走査方向に、画像領域外の領域が存在し、第2の実施形態は、副走査方向の画像領域外の領域のタイミング(期間)でレジストレーション補正モードの処理を行う。各色間の補正は所定のタイミングで行い、複数のビームでの潜像を形成する際の補正のみを紙間で行ってもよい。副走査方向の画像領域外の領域は、電源立ち上げ時直後や、用紙と用紙の間の時間等に対応する領域である。
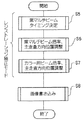
図18は、副走査方向の画像領域外の領域で行われるレジストレーション補正モードの処理と、副走査方向の画像領域で行われる画像形成モードの処理との流れを示すフローチャートである。
レジストレーション補正モードの処理(S5〜S7)を行った後、画像形成モードでの処理(S8)に移行する。第2の実施形態の場合、かかる処理を繰り返しても良い。また、1回の転写起動では、レジストレーション補正モードの処理を1回だけ行っても良い。さらには、連続転写が起動された場合に、レジストレーション補正モードの処理を行った後、所定回の転写が実行された後、次のレジストレーション補正モードの処理を行うようにして、黒マルチビームタイミング決定処理(S5)のみを、各画像書き込みの間(紙間)で行っても良い。
この第2の実施形態の場合、第1の実施形態の黒マルチビーム入射順序の判断処理(S1)に代えて、黒マルチビームタイミング決定の処理がなされる。
第2の実施形態でのサブフローチャートは第1の実施形態と異なるので詳細に説明をする。
図19は、黒マルチビームのタイミング決定処理(S5)の詳細を示している。なお、この黒マルチビームのタイミング決定処理では、他の色成分のレーザビームが出射されることはない。
まず、ビーム位置検知領域にて、黒用の第1及び第2のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TK0で(第1及び第2のレーザビームのどちらを検知したかは問われない)、第2のレーザビームの出射を停止し、時点TK0から、第1のレーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTK1を計測する(S50)。
また、ビーム位置検知領域にて、黒用の第1及び第2のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TK0で(第1及び第2のレーザビームのどちらを検知したかは問われない)、第1のレーザビームの出射を停止し、時点TK0から、第2のレーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTK2を計測する(S51)。
そして、黒用の第1のレーザビームに係るデータ制御部115B1の遅延時間データ保持部の初期(又は前回)設定マージンΔTK0はそのままとし、黒用の第2のレーザビームに係るデータ制御部115B2の遅延時間データ保持部には、計測された時間によって定まる設定マージンΔTK0+ΔTK2−ΔTK1を保持させる(S52)。
なお、黒用の第2のレーザビームに係る設定マージンΔTK0+ΔTK2−ΔTK1におけるΔTK2−ΔTK1は、黒用の第1及び第2のレーザビームの主走査方向の時間差(ビーム間ピッチ)になっており、黒用の第2のレーザビームに係る設定マージンは、この時間差分だけ初期(又は前回)設定マージンΔTK0を修正したものとなっている。
また、この第2の実施形態の場合、第1の実施形態とは異なり、黒用の第1及び第2のレーザビームを共にオンしたときに、水平同期用センサ23の第1の主走査ビーム位置検知部23aにどちらに先に到達するかの特定は行なわれないが、先に到達するレーザビームが、主走査方向のタイミングの基準ビームとなっている。
図20は、第2の実施形態での黒マルチビームの倍率、主走査方向位置の調整処理の詳細を示している。黒マルチビームの倍率、主走査方向位置の調整処理を、カラー用ビームの倍率、主走査方向位置の調整処理より先に行っている理由は、第1の実施形態で説明した理由による。
まず、ビーム位置検知領域にて、黒用の第1及び第2のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点から(黒用の第1及び第2のレーザビームのどちらを検知したかは問われない)、黒用の第1のレーザビームについては初期(又は前回)設定マージンΔTK0だけ経過した時点からレジストレーション測定用画像を書き込み、黒用の第2のレーザビームについては設定マージンΔTK0+ΔTK2−ΔTK1だけ経過した時点からレジストレーション測定用画像を書き込む(S60)。
また、ビーム位置検知領域にて、黒用の第1及び第2のレーザビームを出射させ、水平同期用センサ23における第2の主走査ビーム位置検知部23bが検知した時点から(黒用の第1及び第2のレーザビームのどちらを検知したかは問われない)、黒用の第1のレーザビームについては初期(又は前回)設定マージンΔTK0だけ経過した時点からレジストレーション測定用画像を書き込み、黒用の第2のレーザビームについては設定マージンΔTK0+ΔTK2−ΔTK1だけ経過した時点からレジストレーション測定用画像を書き込む(S61)。
以上の処理により、黒用の第1及び第2のレーザビームに関しても、水平同期用センサ23における第1及び第2の主走査ビーム位置検知部23a及び23bを基準とした上流、下流のそれぞれに2個のレジストレーション測定用画像が書き込まれる。これら4個のレジストレーション測定用画像のうち、第1の主走査ビーム位置検知部23aを基準にした画像と、第2の主走査ビーム位置検知部23bを基準にした2つずつの画像は、副走査方向に離間して書き込まれる(図12参照)。また、その模様は、上述した図12に示すようなものとする。
その後、2個のレジストレーションセンサ78及び80での読み取りの時間差を得、この時間差に基づいて、黒用の第1及び第2のレーザビームの主走査方向でのずれ倍率や、主走査方向での横ずれ量を演算し、ずれ倍率に対応した画像クロック周波数を得ると共に、主走査方向での横ずれ量に対応した時間に上述した設定マージンΔTK0を更新させ、また、黒用の第1及び第2のレーザビームの主走査方向の時間差ΔTK2−ΔTK1に対応するデータ(例えばクロック数及び位相データ)も更新させる(S62)。
そして、黒成分の画像クロック発生部119Bに新たな画像クロック周波数を設定させ(S63)、また、黒成分のデータ制御部115B1、115B2における遅延時間データ保持部に更新された設定マージンΔTK0、ΔTK0+ΔTK2−ΔTK1に対応するデータを保持させる(S64)。
図21は、図18におけるカラー用ビームの倍率、主走査方向位置の調整処理の詳細を示している。
まず、ビーム位置検知領域にて、黒用の第1及び第2のレーザビームを出射させ、他の色成分のレーザビームの出射を停止し、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点から(黒用の第1及び第2のレーザビームのどちらを検知したかは問われない)、前回(又は初期)の設定マージンΔTY0、ΔTM0、ΔTC0後に、イエロー用レーザビーム、マゼンタ用レーザビーム、シアン用レーザビームによって、各色用のレジストレーション測定用画像を書込む(S70)。なお、黒用の第1及び第2のレーザビームは、水平同期用センサ23における第1の主走査ビーム位置検知部23aで検知された時点で出射が停止される。また、各色用のレジストレーション測定用画像として、例えば、図12に示した模様RB1と同様なものを書き込む。
そして、2個のレジストレーションセンサ78及び80での読み取りの時間差を得、この時間差に基づいて、イエロー用レーザビーム、マゼンタ用レーザビーム、シアン用レーザビームの主走査方向でのずれ倍率や、主走査方向での横ずれ量を演算し、ずれ倍率に対応した画像クロック周波数を得ると共に、主走査方向での横ずれ量に対応した時間に上述した設定マージンΔTY0、ΔTM0、ΔTC0を更新させる(S71)。
そして、イエロー用、マゼンタ用、シアン用の画像クロック発生部119Y、119M、119Cに新たな画像クロック周波数を設定させ(S72)、また、イエロー用、マゼンタ用、シアン用のデータ制御部115Y、115M、115Cにおける遅延時間データ保持部に更新された設定マージンΔTY0、ΔTM0、ΔTC0を保持させる(S73)。
以上のようなレジストレーション補正モード(図18のS5〜S7)の処理後に移行される、画像形成モードでの処理(画像書き込み)では、図22に示すようなタイミング制御を行う。なお、画像形成モードでの処理は、副走査方向の画像領域において実行される。
黒用やカラー用の画像クロックの周波数は、上述したレジストレーション補正モードで決定されたものに設定する(S80)。
ビーム位置検知領域にて、黒用の第1及び第2のレーザビームを出射させ、他の色成分のレーザビームの出射を停止し、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点で(黒用の第1及び第2のレーザビームのどちらを検知したかは問われない)、黒用の第1及び第2のレーザビームの出射を停止させ、そして、黒用の第1のレーザビーム、第2のレーザビーム、イエロー用レーザビーム、マゼンタ用レーザビーム、シアン用レーザビームはそれぞれ、検知時点から設定マージンΔTK0、ΔTK0+ΔTK2−ΔTK1、ΔTY0、ΔTM0、ΔTC0後に画像を書き込む(S81)。
以上のように、第2の実施形態においては、全てのレーザビームに関し、黒用の第1及び第2のレーザビームの先行する方の水平同期タイミングを基準に画像書き込みが実行される。
第2の実施形態の光走査装置及び画像形成装置によっても、同じ偏向後光学系を用いた場合には、画像有効画角(領域)を従来より広くとることができ、又は、同じ画像有効画角(領域)を確保するには、実質的に性能を確保しなければいけない偏向角を従来に比べ小さくでき、結像用の光学素子や多面鏡本体(回転多面鏡)の寸法を小さくすることができる。
また、黒用のレーザビームだけを水平同期用センサに導き、他の色成分について、黒用のレーザビームを水平同期用センサが検知した時点を基準として、画像形成を行っても、実際上十分な画質を確保することができる。
さらに、レジストレーションセンサ78及び80の取り付け位置の精度が低くても、主走査方向の倍率ずれを高精度に検出することができ、その倍率ずれを適切に補償することができる。
さらにまた、副走査方向の画像領域外の領域でレジストレーション補正モードの処理を行うようにしたので、画像形成中は、イエロー、マゼンタ、シアン用の水平同期信号の検知及び処理を実行しなくて良く、主走査方向の画像領域を従来より相対的に広くとることができる。また、黒用のレーザビームだけを水平同期用センサに導いて黒マルチビームのタイミング決定の処理を行うに際しても、これを画像形成外の時間に行うことにより、時間的な余裕を以て、処理することができる。これにより、黒マルチビームタイミングを決定する際に、周期的な変動が出やすい偏向器の1回転の間の平均を取る等の処理を行うこともできる。
多面鏡本体(回転多面鏡)の1つの偏向面(反射面)、又は、一体に加工された偏向面にて、複数の光線を偏向する場合には、(十分に偏向面の平面度がでていれば)複数ビームの相対位置は、面毎に変動することはない。このことを利用し、副走査方向画像領域内では、基準となるレーザビーム1つのみを検知し、他のレーザビームについては、副走査方向画像領域外で、基準レーザビームとの関係を求めておき、そのデータを活用して、発光タイミングを決めようというものである。これにより、1つの偏向面、又は、一体で加工された偏向面で走査される間に、主走査方向画像領域外で、全てのレーザビームのタイミングを測定する必要がなくなり、副走査方向画像領域外で、複数の偏向面で走査されている間に、主走査方向ではほぼ同じ場所で、順次、各レーザビーム毎のタイミングを測定し、これを補正するための各レーザビームに対する値を保持する。
(第3の実施形態)
次に、図面を用いて、本発明の光走査装置及び画像形成装置の第3の実施形態について説明する。
第3の実施形態は、黒用のレーザビームが4本、イエロー、マゼンタ、シアン用のレーザビームがそれぞれ2本である点が、第1の実施形態と大きく異なっている点である。第3の実施形態は、それぞれの潜像が、複数本のレーザビームで走査されるため、それぞれのレーザビームを、1つの水平同期用センサを通せるようにして、1つの潜像を形成するビーム同士の精度を確保しようとしたものである。
第3の実施形態の画像形成装置も、その全体構成は、上述した図1に示す構成と同様な構成を有しており、その説明は省略する。
図23及び図24は、第1の実施形態に係る図2及び図3に対応する図面であり、第1の実施形態との同一、対応部分には同一符号を付して示し、説明を省略する。
黒、イエロー、マゼンタ、シアン用の光源3(B、Y、M、C)は、全て半導体レーザアレイとなっており、黒用の半導体レーザアレイ3Bは4個の発光点を有し、カラー用の各半導体レーザアレイ3Y、3M、3Cはそれぞれ2個の発光点を有する。
第3の実施形態の場合、水平同期用折り返しミラー25には、全ての色成分のレーザビームが入射されるようになされており、水平同期用センサ23に、全ての色成分のレーザビームを反射させて入射させるようになされている。
そのため、偏向後光学系(結像光学系)30を通過したカラー用のレーザビームを分離するための第1の折り返しミラー33Y、33M、33Cはそれぞれ、図25に示すように、主走査方向の上流側がレーザビームを透過させる透過部33−1となっており、その他の部分が反射部(アルミミラー蒸着部)33−2となっている。第1の折り返しミラー33Y、33M、33Cの反射部33−2をアルミニュームの蒸着により作成する際に、透過部33−1となる部分をテープなどでマスキングすることにより、図25に示す第1の折り返しミラー33Y、33M、33Cを作成できる。
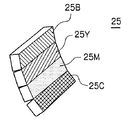
水平同期用折り返しミラー25は、図26に示すように、各色成分に対応した4枚の平面ミラー25B、25Y、25M、25Cからなる。4枚の平面ミラー25B、25Y、25M、25Cは、主走査方向の反射角はほぼ同じであり、副走査方向の反射角が異なっており、副走査方向の反射角は、各色成分のレーザビームがその像面相当の位置で1点で交差するように設定されている。すなわち、多面鏡本体52aが同じ振り角の際に、全ての色成分のレーザビームが水平同期用センサ23上のほぼ同じ位置(上記交差点に相当)に到達するようにしている。
図27は、第3の実施形態の画像形成装置の画像形成動作を制御する処理回路の概略ブロック図であり、第1の実施形態に係る図7と対応する図面である。なお、図27では、図が複雑になるため、マゼンタ、シアンの構成部分は省いているが、これは、イエローと同じ構成となっている。
黒用には、4系統のデータ制御部115B1〜115B4、レーザ駆動部116B1〜116B4、半導体レーザ3B1〜3B4が設けられ、画像クロック発生部119Bは4系統に共通に設けられており、また、第1の実施形態と同様に、ビーム相対位置制御部121Bも設けられている。
イエロー用には、2系統のデータ制御部115Y1、115Y2、レーザ駆動部116Y1、116Y2、半導体レーザ3Y1、3Y2が設けられ、画像クロック発生部119Yは2系統に共通に設けられ、また、ビーム相対位置制御部121Yも設けられている。
その他の構成要素は、第1の実施形態の処理回路(図7参照)と同様である。
図28は、第3の実施形態のレジストレーション補正モード及び画像形成モードのタイミング制御処理の流れを示すフローチャートである。
図28は、黒用、イエロー用、マゼンタ用、シアン用の潜像をそれぞれ形成する全レーザビームに対するタイミングのずれ量をそれぞれの第1のレーザビームに対して算出し、次に、黒のレジストレーション測定用画像にて絶対倍率(画像クロック発生部の値設定)、書き出し位置を補正し、他の色成分については、レジストレーションセンサの読み値に従って、黒成分とのずれが発生しないように、絶対倍率(画像クロック発生部の値設定)、書き出し位置を補正し、各潜像を形成するレーザビームに対する遅延量に対してその補正量を加えることとする流れを示している。
第3の実施形態の画像形成装置は、レジストレーション補正モードにおいて、黒マルチビームのタイミング決定処理(S90)、イエローマルチビームのタイミング決定処理(S91)、マゼンタマルチビームのタイミング決定処理(S92)、シアンマルチビームのタイミング決定処理(S93)、黒マルチビームの倍率、主走査方向の位置の調整処理(S94)、カラー用ビームの倍率、主走査方向の位置の調整処理(S95)を行い、その後、画像形成モードでの画像書き込み処理(S96)を行う。
図29は、図28の黒マルチビームのタイミング決定処理(S90)の詳細を示すフローチャートである。なお、この黒マルチビームのタイミング決定処理では、他の色成分のレーザビームが出射されることはない。
まず、ビーム位置検知領域にて、黒用の第1〜第4のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TK0で(黒用の第1、第2、第3、第4のレーザビームのいずれを検知したかは問われない)、第1のレーザビームの出射だけを継続し、時点TK0から、第1のレーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTK1を計測する(S900)。
また、ビーム位置検知領域にて、黒用の第1〜第4のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TK0で、第2のレーザビームだけ出射を継続し、時点TK0から、第2のレーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTK2を計測する(S901)。
そして、黒用の第1のレーザビームに係るデータ制御部115B1の遅延時間データ保持部の初期(又は前回)設定マージンΔTK0はそのままとし、黒用の第2のレーザビームに係るデータ制御部115B2の遅延時間データ保持部には、計測された時間によって定まる設定マージンΔTK0+ΔTK2−ΔTK1を保持させる(S902)。なお、黒用の第2のレーザビームに係る設定マージンΔTK0+ΔTK2−ΔTK1におけるΔTK2−ΔTK1は、黒用の第1及び第2のレーザビームの主走査方向の時間差になっており、黒用の第2のレーザビームに係る設定マージンは、この時間差分だけ初期(又は前回)設定マージンΔTK0を修正したものとなっている。
また、ビーム位置検知領域にて、黒用の第1〜第4のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TK0で、第3のレーザビームの出射だけを継続し、時点TK0から、第3のレーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTK3を計測する(S903)。
そして、黒用の第3のレーザビームに係るデータ制御部115B3の遅延時間データ保持部には、計測された時間によって定まる設定マージンΔTK0+ΔTK3−ΔTK1を保持させる(S904)。なお、黒用の第3のレーザビームに係る設定マージンΔTK0+ΔTK3−ΔTK1におけるΔTK3−ΔTK1は、黒用の第1及び第3のレーザビームの主走査方向の時間差になっており、黒用の第3のレーザビームに係る設定マージンは、この時間差分だけ初期(又は前回)設定マージンΔTK0を修正したものとなっている。
さらに、ビーム位置検知領域にて、黒用の第1〜第4のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TK0で、第4のレーザビームの出射だけを継続し、時点TK0から、第4のレーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTK4を計測する(S905)。
そして、黒用の第4のレーザビームに係るデータ制御部115B4の遅延時間データ保持部には、計測された時間によって定まる設定マージンΔTK0+ΔTK4−ΔTK1を保持させる(S906)。なお、黒用の第4のレーザビームに係る設定マージンΔTK0+ΔTK4−ΔTK1におけるΔTK4−ΔTK1は、黒用の第1及び第4のレーザビームの主走査方向の時間差になっており、黒用の第4のレーザビームに係る設定マージンは、この時間差分だけ初期(又は前回)設定マージンΔTK0を修正したものとなっている。
この第3の実施形態の場合、黒用の第1〜第4のレーザビームのうち、水平同期用センサ23における第1の主走査ビーム位置検知部23aに最も早く到達するものが基準ビームとなっている。なお、その基準ビームが、黒用の第1〜第4のレーザビームのいずれであるかの特定は行われていない。
図30は、図28のイエローマルチビームのタイミング決定処理(S91)の詳細を示すフローチャートである。なお、このイエローマルチビームのタイミング決定処理では、他の色成分のレーザビームが出射されることはない。
まず、ビーム位置検知領域にて、イエロー用の第1及び第2のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TY0で(第1及び第2のレーザビームのどちらが検知されたかは問われない)、第1のレーザビームだけ出射を継続し、時点TY0から、第1のレーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTY1を計測する(S910)。
また、ビーム位置検知領域にて、イエロー用の第1及び第2のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点TY0で、第2のレーザビームだけ出射を継続し、時点TY0から、第2のレーザビームが水平同期用センサ23における第2の主走査ビーム位置検知部23bで検知されるまでの時間ΔTY2を計測する(S911)。
そして、イエロー用の第1のレーザビームに係るデータ制御部115Y1の遅延時間データ保持部の初期(又は前回)設定マージンΔTY0はそのままとし、イエロー用の第2のレーザビームに係るデータ制御部115Y2の遅延時間データ保持部には、計測された時間によって定まる設定マージンΔTY0+ΔTY2−ΔTY1を保持させる(S912)。
なお、イエロー用の第2のレーザビームに係る設定マージンΔTY0+ΔTY2−ΔTY1におけるΔTY2−ΔTY1は、イエロー用の第1及び第2のレーザビームの主走査方向の同じ主走査方向位置を通過する時間差になっており、イエロー用の第2のレーザビームに係る設定マージンは、この時間差分だけ初期(又は前回)設定マージンΔTY0を修正したものとなっている。
図28におけるマゼンタマルチビームのタイミング決定処理(S92)やシアンマルチビームのタイミング決定処理(S93)の詳細は、上述したイエローマルチビームのタイミング決定処理(S91)の詳細と同様であるので、その説明は省略する。
図31は、図28における黒マルチビームの倍率、主走査方向の位置の調整処理(S94)の詳細を示すフローチャートである。
まず、ビーム位置検知領域にて、黒用の第1〜第4のレーザビームを出射させ、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点から(黒用の第1、第2、第3、第4のレーザビームのいずれを検知したかは問われない)、黒用の第1のレーザビームについては初期(又は前回)設定マージンΔTK0だけ経過した時点からレジストレーション測定用画像を書き込み、黒用の第2のレーザビームについては設定マージンΔTK0+ΔTK2−ΔTK1だけ経過した時点からレジストレーション測定用画像を書き込み、黒用の第3のレーザビームについては設定マージンΔTK0+ΔTK3−ΔTK1だけ経過した時点からレジストレーション測定用画像を書き込み、黒用の第4のレーザビームについては設定マージンΔTK0+ΔTK4−ΔTK1だけ経過した時点からレジストレーション測定用画像を書き込む(S940)。
また、ビーム位置検知領域にて、黒用の第1〜第4のレーザビームを出射させ、水平同期用センサ23における第2の主走査ビーム位置検知部23bが検知した時点から(黒用の第1、第2、第3、第4のレーザビームのいずれを検知したかは問われない)、黒用の第1のレーザビームについては初期(又は前回)設定マージンΔTK0だけ経過した時点からレジストレーション測定用画像を書き込み、黒用の第2のレーザビームについては設定マージンΔTK0+ΔTK2−ΔTK1だけ経過した時点からレジストレーション測定用画像を書き込み、黒用の第3のレーザビームについては設定マージンΔTK0+ΔTK3−ΔTK1だけ経過した時点からレジストレーション測定用画像を書き込み、黒用の第4のレーザビームについては設定マージンΔTK0+ΔTK4−ΔTK1だけ経過した時点からレジストレーション測定用画像を書き込む(S941)。
以上の処理により、黒用の第1〜第4のレーザビームに関して、水平同期用センサ23における第1及び第2の主走査ビーム位置検知部23a及び23bを基準とした上流、下流のそれぞれに2個のレジストレーション測定用画像が書き込まれる。これら4個のレジストレーション測定用画像は、すなわち、ビーム位置検知部23a及び23bを基準としたそれぞれのレジストレーション測定用画像は、副走査方向に離間して書き込まれる(図12参照)。また、その模様は、上述した図12に示すようなものとする。
その後、2個のレジストレーションセンサ78及び80での読み取りの時間差を得、この時間差に基づいて、黒用の第1〜第4のレーザビームの主走査方向でのずれ倍率や、主走査方向での横ずれ量を演算し、ずれ倍率に対応した画像クロック周波数を得ると共に、主走査方向での横ずれ量に対応した時間に上述した設定マージンΔTK0を更新させ、また、黒用の第1及び第2のレーザビームの主走査方向の時間差ΔTK2−ΔTK1を設定するデータや、黒用の第1及び第3のレーザビームの主走査方向の時間差ΔTK3−ΔTK1を設定するデータや、黒用の第1及び第4のレーザビームの主走査方向の時間差ΔTK4−ΔTK1を設定するデータも更新させる(S942)。
そして、黒成分の画像クロック発生部119Bに新たな画像クロック周波数を設定させ(S943)、また、黒成分のデータ制御部115B1、115B2、115B3、115B4における遅延時間データ保持部にそれぞれ、更新された設定マージンΔTK0、ΔTK0+ΔTK2−ΔTK1、ΔTK0+ΔTK3−ΔTK1、ΔTK0+ΔTK4−ΔTK1を表すデータを保持させる(S944)。
図32は、カラー用ビームの倍率、主走査方向の位置の調整処理(S95)の詳細を示すフローチャートである。
まず、ビーム位置検知領域にて、黒用の第1〜第4のレーザビームを出射させ、他の色成分のレーザビームの出射を停止し、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点から(黒用の第1〜第4のレーザビームのいずれが検知されたかは問われない)、前回(又は初期)の設定マージンΔTY0、ΔTM0、ΔTC0後に、イエロー用レーザビーム、マゼンタ用レーザビーム、シアン用レーザビームによって、各色用のレジストレーション測定用画像を書込む(S950)。なお、黒用の第1〜第4のレーザビームは、水平同期用センサ23における第1の主走査ビーム位置検知部23aで検知された時点で出射が停止される。また、各色用のレジストレーション測定用画像として、例えば、図12に示した模様RB1と同様なものを書き込む。
さらに、イエロー用、マゼンタ用、シアン用のレーザビームでのレジストレーション測定用画像の書き込みは、イエロー用、マゼンタ用、シアン用の第1及び第2のレーザビームの2つのビームで書き込まれる。
そして、2個のレジストレーションセンサ78及び80での読み取りの時間差を得、この時間差に基づいて、イエロー用レーザビーム、マゼンタ用レーザビーム、シアン用レーザビームの主走査方向でのずれ倍率や、主走査方向での横ずれ量を演算し、ずれ倍率に対応した画像クロック周波数を得ると共に、主走査方向での横ずれ量に対応した時間に上述した設定マージンΔTY0、ΔTM0、ΔTC0を更新させる(S951)。
その後、イエロー用、マゼンタ用、シアン用の画像クロック発生部119Y、119M、119Cに新たな画像クロック周波数を設定させ(S952)、また、イエロー用、マゼンタ用、シアン用のデータ制御部115Y、115M、115Cにおける遅延時間データ保持部に更新された設定マージンΔTY0、ΔTM0、ΔTC0を保持させる(S953)。
以上のような処理は、黒用の第1〜第4のレーザビームのいずれかが該当する基準ビームと、イエロー用、マゼンタ用、シアン用のレーザビーム(の組)とのビーム間ピッチの見直しになっている。
以上のようなレジストレーション補正モード(図28のS90〜S95)の処理後に移行される、画像形成モードでの処理(画像書き込み;S96)では、図33に示すようなタイミング制御を行う。
黒用やカラー用の画像クロックの周波数は、上述したレジストレーション補正モードで決定されたものに設定する(S960)。
ビーム位置検知領域にて、黒用の第1〜第4のレーザビームを出射させ、他の色成分のレーザビームの出射を停止し、水平同期用センサ23における第1の主走査ビーム位置検知部23aが検知した時点で(黒用の第1〜第4のレーザビームのいずれかは問われない)、黒用の第1〜第4のレーザビームの出射を停止させ、そして、黒用の第1のレーザビーム、第2のレーザビーム、第3のレーザビーム、第4のレーザビーム、イエロー用の第1のレーザビーム、第2のレーザビーム、マゼンタ用の第1のレーザビーム、第2のレーザビーム、シアン用の第1のレーザビーム、第2のレーザビームはそれぞれ、検知時点から設定マージンΔTK0、ΔTK0+ΔTK2−ΔTK1、ΔTK0+ΔTK3−ΔTK1、ΔTK0+ΔTK4−ΔTK1、ΔTY0、ΔTY0+ΔTY2−ΔTY1、ΔTM0、ΔTM0+ΔTM2−ΔTM1、ΔTC0、ΔTC0+ΔTC2−ΔTC1後に画像を書き込む(S961)。
以上のように、第3の実施形態においては、全てのレーザビームに関し、黒用の第1〜第4のレーザビームのうち、最も先行するレーザビームの水平同期タイミングを基準に画像書き込みが実行される。
第3の実施形態の光走査装置及び画像形成装置によれば、以下の効果を奏することができる。
水平同期用センサに全ての色成分のレーザビームを導いているが、光偏向装置からの偏向されたレーザビームが通過していくほぼ平面から、副走査方向にずれた位置に水平同期用センサを設けて、各色成分のレーザビームを時分割に水平同期用センサに導いているため、光偏向装置からの偏向角における水平同期用センサへ導くための偏向角の割合を従来より小さくすることができる(図16参照)。
その結果、同じ偏向後光学系を用いた場合には、画像有効画角(領域)を従来より広くとることができ、又は、同じ画像有効画角(領域)を確保するには、実質的に性能を確保しなければいけない偏向角を従来に比べ小さくでき、結像用の光学素子や多面鏡本体(円転多面鏡)の寸法を小さくすることができる。
また、画像書き込み時には、黒用の1つのレーザビームだけを水平同期用センサに導いているので、水平同期処理が容易である。このように、画像書き込み時に黒用のレーザビームだけを水平同期用センサに導き、他の色成分については、先行する黒用のレーザビームを水平同期用センサが検知した時点を基準として、画像形成を行っても、実際上十分な画質を確保することができる。
複数のレーザビームで1つの像を形成する場合、レーザビーム間の相対位置が10μmより大きいと、副走査方向の直線のぎざぎざが、人の目で感じられることが感応試験より分かっっているが、同一画像を形成する黒用の4個のレーザビームをそれぞれ水平同期用センサで検知させ、第2〜第4のレーザビームについては、第1のレーザビームとの主走査方向の時間差を修正させるようにしたので、また、同一画像を形成するカラー用の2個のレーザビームをそれぞれ水平同期用センサで検知させ、第2のレーザビームについては、第1のレーザビームとの主走査方向の時間差を修正させるようにしたので、同一色に係るビーム間ピッチずれを10μm以下に抑えることができる。
また、色成分が異なる像同士を重ね合わせてカラーの画像を形成した際、各色成分の画像同士のずれ量が85μmより大きいと、色ずれとしての許容範囲を超えるということが感応試験より分かっているが、他の色成分については、黒用の先行するレーザビームを水平同期用センサが検知した時点を基準として画像形成しているが、レジストレーション補正モードでの主走査方向の横ずれ量の検出も、黒用の先行するレーザビームの検知時点でレジストレーション画像を書き込んで捉えて修正しているので、黒用のレーザビームとその色成分のレーザビームとの位置ずれを85μm以下に抑えることができる。
さらに、第3の実施形態においても、黒用の各レーザビームについては、第1の実施形態で説明した方法により、主走査方向の倍率ずれを検出するようにしたので、レジストレーションセンサ78及び80の取り付け位置の精度が低くても、主走査方向の倍率ずれを高精度に検出することができ、その倍率ずれを適切に補償することができる。
(他の実施形態)
光走査装置が、レーザビームを2方向から入射させ、かつ、ポリゴンミラー面を2面使用するタイプのものについても、本発明を適用することができる。
また、黒の潜像形成に使われるレーザビームが2ビーム、他色の潜像形成に使われるレーザビームが1ビームのときには、1ビームで潜像を形成する2つのレーザビームを反射する側は、図4に示すような水平同期用センサではなく、主走査方向の検知位置が1個の通常の水平同期センサを用いることもできる。
さらに、第1及び第2の実施形態では、画像形成装置が、黒専用の高解像度モード、若しくは、黒専用の高速モード、又は、その両方と、カラーモードを持つ場合で、黒用の潜像のみを印字する際には、複数のレーザビームを使用し、カラー印字の際には、黒用光線も1本のみしか使用しないときでも、本発明を適用することにより、各色成分毎の水平同期用センサを設けなくても済むというメリットを有する。黒用の複数のレーザビームを用いる際には(第1及び第2の実施形態では、2本の例を示しているが、これは4、8本でも同様のフローで処理できる)、図8や図18のカラー用ビーム倍率、主走査方向位置の調整処理(S3、S7)をスキップし、画像書き込みの際には、イエロー、マゼンタ、シアンに対する処理をスキップすれば良い。カラー印字の際には、黒マルチビームで、第2のレーザビームに関する処理をスキップすれば良い。高速モードを持っ場合には、ポリゴンミラー回転数を制御するための手段を付加し、黒用ビーム本数倍の回転速度で回転するようにすれば、カラーの際の黒用ビーム本数倍の印字速度を実現できる。
さらに、第3の実施形態では、画像形成装置が、黒専用の高解像度モード、若しくは、黒専用の高速モード、又は、その両方と、カラーモードを持つ場合で、黒用の潜像のみを印字する際には、黒用の全ビーム(実施形態では4本)を使用し、カラー印字の際には、黒用光線も他の潜像形成時に使用する本数(実施形態では2本)のみしか使用しないというときでも、本発明を適用することにより、各色成分毎の水平同期用センサを設けなくても済むというメリットを有する。黒用の複数のレーザビームを用いる際には、図28のイエロー/マゼンタ/シアンのマルチビームタイミング決定(S91〜S93)、カラー用ビーム倍率、主走査方向位置調整(S95)のステップをスキップし、画像書き込みの際には、イエロー、マゼンタ、シアンに対する処理をスキップすれば良い。カラー印字の際には、黒マルチビームで、カラー用ビーム本数よりも多い黒用ビームに関する処理をスキップすれば良い。高速モードを持つ場合には、ポリゴンミラー回転数を制御するための手段を付加し、カラー印字の際のポリゴンミラー回転数の、(黒用ビーム本数/カラー用ビーム本数)倍の回転速度で回転するようにすれば、カラーの際の、(黒用ビーム本数/カラー用ビーム本数)倍の印字速度を実現できる。
上記では、画像書き込み時に水平同期タイミングの基準となる色成分のレーザビームが黒成分のレーザビームであるものを示したが、他の色成分のレーザビームであっても良い。この場合、基準となる色成分は、複数のレーザビームで潜像を形成するものであることを要する。
また、上記では、黒成分のレーザビーム数が他の色成分のレーザビーム数より多い場合を示したが、黒成分のレーザビーム数と他の色成分のレーザビーム数とが等しくても良い(但し、レーザビーム数が1を除く)。
上記各実施形態の技術思想は、その一部を組合せて適用しても良いことは勿論である。例えば、第3の実施形態において、第1の実施形態のように、先行する黒用のレーザビームを特定し、そのレーザビームについて初期設定マージンTK0を対応付け、他のレーザビームは、先行する黒用のレーザビームを水平同期タイミングの基準として、設定マージンを見直すようにしても良い。
また、水平同期用センサは、主走査方向の上流側のみで検知するものであったが、主走査方向の下流側で検知する検知手段も有するものであっても良い。
上記では、色成分の組合せが、黒、イエロー、マゼンタ、シアンであるものを示したが、他の色成分の組合せでカラー画像を形成する装置にも本発明を適用することができる。
第1の実施形態で説明した、主走査方向に所定の距離を離して書き出した2種類のレジストレーション測定用画像を読み取って、主走査方向の倍率ずれを得る方法は、感光体ドラムが1個の画像形成装置に対しても適用することができる。
また、第1の実施形態では、主走査方向の倍率ずれを検出するため、主走査方向に所定の距離を離して書き出す2種類のレジストレーション測定用画像をそれぞれ、黒用の第1及び第2のレーザビームで書き出すものを示したが、主走査方向の倍率ずれを検出するためだけならば、同一のレーザビームによって、2種類のレジストレーション測定用画像を書き出すようにしても良い。
また、複数の光線で1つの潜像を形成する際のそれぞれの潜像形成タイミングの基準となる光線に対する他の光線のタイミングを決定する作業、又は、マルチビーム入射順序判断のみを画像領域間で行い、複数の潜像間のタイミング、及び、画像周波数を含むレジストレーション処理は、電源投入時、及び、所定のタイミング(一定の画像枚数印字後、温度が前回のレジストレーション処理時より所定の値以上変化したとき、又は、レジストレーションを画像領域外で測定し続け、ずれが一定以上なった場合等)で行ってもよいし、あるいはマルチビームタイミング処理、マルチビーム入射順序判断を含む全レジストレーション補正を、各画像領域間で行って、さらに精度を高めても良い。
1…マルチビーム光走査装置、3Y、3M、3C、3B…半導体レーザ、5…光偏向装置、23…水平同期用センサ、25…水平同期用折り返しミラー、30…偏向後光学系、50Y、50M、50C、50B…画像形成部、78、80…レジストレーションセンサ、100…画像形成装置、110…画像データ制御部、115Y、115M、115C、15B1、115B2…データ制御部、116Y、116M、116C、116B1、116B2…レーザ駆動部、117…レジストレーション相対位置演算部、118…レジストレーション制御部、119Y、119M、119C、119B…画像クロック発生部、121…ビーム相対位置制御部。