JP4680566B2 - 多軸力センサチップとこれを用いた多軸力センサ - Google Patents
多軸力センサチップとこれを用いた多軸力センサ Download PDFInfo
- Publication number
- JP4680566B2 JP4680566B2 JP2004311145A JP2004311145A JP4680566B2 JP 4680566 B2 JP4680566 B2 JP 4680566B2 JP 2004311145 A JP2004311145 A JP 2004311145A JP 2004311145 A JP2004311145 A JP 2004311145A JP 4680566 B2 JP4680566 B2 JP 4680566B2
- Authority
- JP
- Japan
- Prior art keywords
- force sensor
- resistance element
- axis force
- sensor chip
- action
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/16—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force
- G01L5/161—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in ohmic resistance
- G01L5/162—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in ohmic resistance of piezoresistors
Description
第5の本発明に係る多軸力センサ用チップ(請求項5に対応)は、上記構成において、好ましくは、歪み抵抗素子と温度補償用抵抗素子から成る4組の抵抗素子群は、作用部の中心を基準にして点対称の位置関係であって、かつ中心から実質的に同一の距離に設けられていることを特徴とする。
上記の各構成によれば、各抵抗素子群の各歪み抵抗素子から検出される応力成分の信号に基づいて後段の信号処理部で印加外力等を演算するとき、行列式の演算を簡易に行うことができる。
第11の本発明に係る多軸力センサチップ(請求項11に対応)は、上記構成において、好ましくは、前記作用部の外縁部に位置する前記非変形領域部の端は第1の孔(K,L,N,M)によって自由端として形成されていることを特徴とする。
第12の本発明に係る多軸力センサチップ(請求項12に対応)は、上記構成において、好ましくは、前記温度補償用抵抗素子は、前記作用部から離間する方向に自由端として形成される非変形領域部の第1の孔(K,L,N,M)によって包囲されていることを特徴とする。
第13の本発明に係る多軸力センサチップ(請求項13に対応)は、上記構成において、好ましくは、前記連結部は前記第一の孔及びチップの縁部に平行するように形成される第2の孔(A,B,C,D)により橋梁部(5Aa,5Ba,5Ca,5Da)と弾性部(5Ab,5Bb,5Cb,5Db)とを形成することを特徴とする。
第14の本発明に係る多軸力センサチップ(請求項14に対応)は、上記構成において、好ましくは、前記ベース部材は、その中央部に作用部の外力作用領域部を備え、外力作用領域部の周囲の領域に、作用部の非変形領域部と連結部の変形発生部を設けたことを特徴とする。
なお、連結部上において歪み抵抗素子が配置される場所は、必ずしも連結部で最も応力が生じる場所とは限らない。歪み抵抗素子はその形成プロセスや配線ルート等、他の様々な要件をも考慮して、最適位置に配置される。
Sig2=((R'Sxa3-R'Sxa1)+(R'Sxb1-R'Sxb3))/4 …(2)
Sig3=(R'Sxa2+R'Sya2+R'Sxb2+R'Syb2)/4 …(3)
Sig4=(R'Sya2-R'Syb2)/2 …(4)
Sig5=(R'Sxb2-R'Sxa2)/2 …(5)
Sig6=((R'Sxa3-R'Sxa1)+(R'Sya3-R'Sya1)+(R'Sxb3-R'Sxb1)
+(R'Syb3-R'Syb1))/8 …(6)
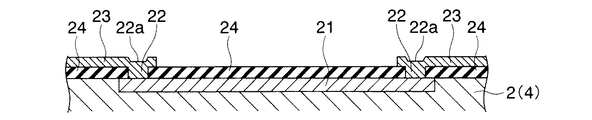
2 半導体基板
3 支持部
4 作用部
4A 中央部(外力作用領域部)
4B 角部(非変形領域部)
10 配線パターン
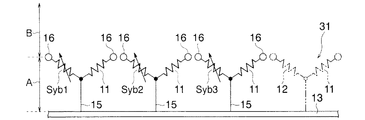
11 温度補償用抵抗素子
12 ダミー抵抗素子
13 GND配線
15 GND配線
16 信号電極パッド
18 信号配線
25 歪み抵抗素子
27 ブリッジ回路
61 6軸力センサ
62 台座
63 減衰機構
64 ガラス台座
A〜D 孔
K〜N 孔
Sxa1〜Sxa3 歪み抵抗素子
Sya1〜Sya3 歪み抵抗素子
Sxb1〜Sxb3 歪み抵抗素子
Syb1〜Syb3 歪み抵抗素子
Claims (15)
- 外力作用領域部と非変形領域部を有する作用部と、この作用部を支持する支持部と、前記作用部と前記支持部を連結する連結部とを備える半導体基板からなるベース部材と、
前記連結部の変形発生部に設けられる歪み抵抗素子と、
前記作用部の前記非変形領域部上に設けられる温度補償用抵抗素子と、
を備え、
前記ベース部材は、スリット状の第1の孔及び第2の孔により前記作用部、前記支持部、および前記連結部からなる複数の領域に機能的に分離され、前記ベース部材は、その中央部に前記作用部の前記外力作用領域部を備え、該外力作用領域部の周囲の領域に前記作用部の非変形領域部を備え、前記非変形領域部は、前記連結部と前記作用部との間を前記スリット状の前記第1の孔により分離することで前記作用部の外縁部に自由端として形成されたことを特徴とする多軸力センサチップ。 - 前記温度補償用抵抗素子は、前記非変形領域部で、前記連結部の前記変形発生部と同等の温度条件を有する箇所に設けられることを特徴とする請求項1記載の多軸力センサチップ。
- 前記作用部は正方形に類似した平面形状を有し、前記歪み抵抗素子と前記温度補償用抵抗素子から成る抵抗素子群は4組設けられ、これらの4組の抵抗素子群の各々は前記作用部の4つの辺部の各々に対応して配置されることを特徴とする請求項1又は請求項2に記載の多軸力センサチップ。
- 前記4組の歪み抵抗素子は、前記作用部の中心を基準にして点対称の位置関係であって、かつ前記中心から実質的に同一の距離に設けられていることを特徴とする請求項3記載の多軸力センサチップ。
- 前記歪み抵抗素子と前記温度補償用抵抗素子から成る前記4組の抵抗素子群は、前記作用部の中心を基準にして点対称の位置関係であって、かつ前記中心から実質的に同一の距離に設けられていることを特徴とする請求項3記載の多軸力センサチップ。
- 各組の前記抵抗素子群は、同一の少なくとも2つの前記歪み抵抗素子と、この歪み抵抗素子の個数に対応して設けられた前記温度補償用抵抗素子とから成ることを特徴とする請求項3〜5のいずれか1項に記載の多軸力センサチップ。
- 各組の前記抵抗素子群は、同一の3つの前記歪み抵抗素子と、同一の3つの前記温度補償用抵抗素子とから成ることを特徴とする請求項6記載の多軸力センサチップ。
- 前記温度補償用抵抗素子は、ベース部材の中心線に対して45°の傾きで配置されることを特徴とする請求項1〜7のいずれか1項に記載の多軸力センサチップ。
- 前記歪み抵抗素子とこれに対応する前記温度補償用抵抗素子とはブリッジ回路の半回路または全回路を形成するように接続されることを特徴とする請求項1〜8のいずれか1項に記載の多軸力センサチップ。
- 前記ブリッジ回路が出力する、前記歪み抵抗素子からの出力信号と前記温度補償用抵抗素子からの出力信号との差信号を増幅する差動増幅部をさらに有する請求項9記載の多軸力センサチップ。
- 前記作用部の外縁部に位置する前記非変形領域部の端が、前記第1の孔(K,L,N,M)によって自由端として形成されていることを特徴とする請求項1記載の多軸力センサチップ。
- 前記温度補償用抵抗素子は、前記作用部から離間する方向に自由端として形成される前記非変形領域部の前記第1の孔(K,L,N,M)によって包囲されていることを特徴とする請求項1記載の多軸力センサチップ。
- 前記連結部は前記第1の孔およびチップの縁部に平行するように形成される前記第2の孔(A,B,C,D)により橋梁部(5Aa,5Ba,5Ca,5Da)と弾性部(5Ab,5Bb,5Cb,5Db)とに機能的に分離されていることを特徴とする請求項1記載の多軸力センサチップ。
- 請求項1〜13のいずれか1項に記載された多軸力センサチップと、
前記支持部を支持することにより、前記多軸力センサチップを支持する支持台座と、
外力が入力される入力軸と、
円筒形または直方体形状からなる外郭を有し、前記外郭の側面に孔が設けられ外力を減衰させる減衰機構と、
外力を前記作用部の前記外力作用領域部に印加させる伝達手段と、
を備え、
前記多軸力センサチップは前記減衰機構の内部に配置されていることを特徴とする多軸力センサ。 - 前記減衰機構は、その中心軸の周りに回転対称の形状を有することを特徴とする請求項14記載の多軸力センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004311145A JP4680566B2 (ja) | 2004-10-26 | 2004-10-26 | 多軸力センサチップとこれを用いた多軸力センサ |
| US11/256,982 US7458281B2 (en) | 2004-10-26 | 2005-10-25 | Multi-axis force sensor chip and multi-axis force sensor using same |
| EP05023438A EP1653208B1 (en) | 2004-10-26 | 2005-10-26 | Multi-axis force sensor chip and multi-axis force sensor using same |
| DE602005021589T DE602005021589D1 (de) | 2004-10-26 | 2005-10-26 | Mehrachsiger Drucksensor-Chip und mehrachsiger Drucksensor damit |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004311145A JP4680566B2 (ja) | 2004-10-26 | 2004-10-26 | 多軸力センサチップとこれを用いた多軸力センサ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006125873A JP2006125873A (ja) | 2006-05-18 |
| JP2006125873A5 JP2006125873A5 (ja) | 2008-10-30 |
| JP4680566B2 true JP4680566B2 (ja) | 2011-05-11 |
Family
ID=35588931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004311145A Expired - Fee Related JP4680566B2 (ja) | 2004-10-26 | 2004-10-26 | 多軸力センサチップとこれを用いた多軸力センサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7458281B2 (ja) |
| EP (1) | EP1653208B1 (ja) |
| JP (1) | JP4680566B2 (ja) |
| DE (1) | DE602005021589D1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019207120A (ja) * | 2018-05-28 | 2019-12-05 | ファナック株式会社 | 変位検出方式の力センサ |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006220574A (ja) * | 2005-02-14 | 2006-08-24 | Hitachi Ltd | 回転体力学量測定装置および回転体力学量計測システム |
| JP4203051B2 (ja) * | 2005-06-28 | 2008-12-24 | 本田技研工業株式会社 | 力覚センサ |
| JP5303101B2 (ja) * | 2006-05-02 | 2013-10-02 | 本田技研工業株式会社 | 力覚センサ用チップ |
| JP4850578B2 (ja) * | 2006-05-19 | 2012-01-11 | 富士通セミコンダクター株式会社 | 半導体記憶装置及びリフレッシュ周期制御方法 |
| JP5007083B2 (ja) * | 2006-08-08 | 2012-08-22 | 本田技研工業株式会社 | 力覚センサ用チップ |
| JP4210296B2 (ja) | 2006-08-24 | 2009-01-14 | 本田技研工業株式会社 | 力覚センサの製造方法 |
| JP5243704B2 (ja) * | 2006-08-24 | 2013-07-24 | 本田技研工業株式会社 | 力覚センサ |
| JP4958501B2 (ja) * | 2006-08-30 | 2012-06-20 | 本田技研工業株式会社 | 力覚センサ用チップ及び外力伝達機構 |
| JP2008058110A (ja) * | 2006-08-30 | 2008-03-13 | Honda Motor Co Ltd | 力覚センサ用チップおよび力覚センサ |
| JP5174343B2 (ja) * | 2006-12-12 | 2013-04-03 | 本田技研工業株式会社 | 力覚センサ用チップ |
| JP4909104B2 (ja) * | 2007-01-31 | 2012-04-04 | 本田技研工業株式会社 | 力覚センサ |
| JP5604035B2 (ja) * | 2008-07-18 | 2014-10-08 | 本田技研工業株式会社 | 力覚センサユニット |
| JP5243988B2 (ja) * | 2009-02-10 | 2013-07-24 | 本田技研工業株式会社 | 多軸力覚センサおよび加速度センサ |
| JP5225883B2 (ja) * | 2009-02-12 | 2013-07-03 | トレックス・セミコンダクター株式会社 | 加速度センサー |
| JP5572001B2 (ja) * | 2010-04-23 | 2014-08-13 | 本田技研工業株式会社 | 物理量センサ |
| JP5935333B2 (ja) * | 2012-01-13 | 2016-06-15 | 株式会社デンソー | 半導体センサ |
| IT201700071798A1 (it) * | 2017-06-27 | 2018-12-27 | St Microelectronics Srl | Sensore di forza multiassiale, metodo di fabbricazione del sensore di forza multiassiale, e metodo di funzionamento del sensore di forza multiassiale |
| EP3671155B1 (en) * | 2017-09-20 | 2021-10-20 | Asahi Kasei Kabushiki Kaisha | Surface stress sensor, hollow structural element, and method for manufacturing same |
| JP6843726B2 (ja) | 2017-10-17 | 2021-03-17 | キヤノン株式会社 | 力覚センサ及びロボット |
| JP2019215273A (ja) * | 2018-06-13 | 2019-12-19 | 株式会社Soken | 荷重センサ |
| CN111141440B (zh) * | 2019-12-25 | 2021-09-24 | 陕西电器研究所 | 一种用于补偿六维力传感器的方法 |
| CN112611489A (zh) * | 2020-12-21 | 2021-04-06 | 陕西电器研究所 | 一种基于薄膜溅射的抗过载扭矩传感器 |
| JP2022142118A (ja) * | 2021-03-16 | 2022-09-30 | ミネベアミツミ株式会社 | センサチップ、力覚センサ装置 |
| JP2022142117A (ja) * | 2021-03-16 | 2022-09-30 | ミネベアミツミ株式会社 | センサチップ、力覚センサ装置 |
| CN113820062B (zh) * | 2021-09-30 | 2022-07-12 | 浙江大学 | 六维力传感器的温度补偿方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4295117A (en) * | 1980-09-11 | 1981-10-13 | General Motors Corporation | Pressure sensor assembly |
| JPS5780532A (en) * | 1980-11-07 | 1982-05-20 | Hitachi Ltd | Semiconductor load converter |
| JPS57169643A (en) | 1981-04-13 | 1982-10-19 | Yamato Scale Co Ltd | Load cell for multiple components of force |
| WO1988008521A1 (en) * | 1987-04-24 | 1988-11-03 | Kabushiki Kaisha Nexy Kenkyusho | Force and moment detector using resistor |
| JP2746298B2 (ja) | 1987-09-03 | 1998-05-06 | 株式会社リコー | 二成分以上の力検出装置 |
| US5095762A (en) * | 1988-07-14 | 1992-03-17 | University Of Hawaii | Multidimensional force sensor |
| DE3918909A1 (de) | 1989-06-09 | 1990-12-13 | Teves Gmbh Alfred | Hauptzylinder, insbesondere fuer eine blockiergeschuetzte, hydraulische bremsanlage, mit einer einrichtung zur bestimmung der lage des hauptkolbens |
| US5981883A (en) * | 1992-07-08 | 1999-11-09 | Lci Technology Group, N.V. | Systems for imaging written information |
| TW425478B (en) * | 1997-09-26 | 2001-03-11 | Hokuriku Elect Ind | Acceleration sensor and 3-axis acceleration sensor |
| JP4011345B2 (ja) | 2002-01-11 | 2007-11-21 | 本田技研工業株式会社 | 多軸力センサチップ |
| US6823744B2 (en) * | 2002-01-11 | 2004-11-30 | Honda Giken Kogyo Kabushiki Kaisha | Six-axis force sensor |
| JP4192084B2 (ja) * | 2003-06-17 | 2008-12-03 | ニッタ株式会社 | 多軸センサ |
| JP2005106679A (ja) * | 2003-09-30 | 2005-04-21 | Nitta Ind Corp | 多軸センサユニットおよびこれを利用した多軸センサ |
-
2004
- 2004-10-26 JP JP2004311145A patent/JP4680566B2/ja not_active Expired - Fee Related
-
2005
- 2005-10-25 US US11/256,982 patent/US7458281B2/en active Active
- 2005-10-26 DE DE602005021589T patent/DE602005021589D1/de active Active
- 2005-10-26 EP EP05023438A patent/EP1653208B1/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019207120A (ja) * | 2018-05-28 | 2019-12-05 | ファナック株式会社 | 変位検出方式の力センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| DE602005021589D1 (de) | 2010-07-15 |
| EP1653208B1 (en) | 2010-06-02 |
| JP2006125873A (ja) | 2006-05-18 |
| EP1653208A3 (en) | 2007-09-12 |
| EP1653208A2 (en) | 2006-05-03 |
| US20060086190A1 (en) | 2006-04-27 |
| US7458281B2 (en) | 2008-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4680566B2 (ja) | 多軸力センサチップとこれを用いた多軸力センサ | |
| US6951142B2 (en) | Six-axis force sensor chip and six-axis force sensor using the same | |
| JP5303101B2 (ja) | 力覚センサ用チップ | |
| JP5007083B2 (ja) | 力覚センサ用チップ | |
| JP5174343B2 (ja) | 力覚センサ用チップ | |
| US8146443B2 (en) | Rotating body dynamic quantity measuring device and system | |
| JP5507306B2 (ja) | 力覚センサ用チップおよび加速度センサ用チップ | |
| US8033009B2 (en) | Method for producing a force sensor | |
| JP4011345B2 (ja) | 多軸力センサチップ | |
| US6864677B1 (en) | Method of testing a sensor | |
| US20050092096A1 (en) | Force detection device | |
| JPH07117470B2 (ja) | 力検出装置 | |
| JP2000241273A (ja) | 圧力検出装置 | |
| JPS6394690A (ja) | 力検出装置 | |
| JP2746298B2 (ja) | 二成分以上の力検出装置 | |
| JP3187754B2 (ja) | 半導体センサおよびその製造方法 | |
| JP2512220B2 (ja) | 複合機能形センサ | |
| TW202334626A (zh) | 多軸力感測裝置及其校正方法 | |
| JP2587255B2 (ja) | 力検出装置 | |
| JP5507325B2 (ja) | 力覚センサ | |
| JPS6375533A (ja) | 力検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081007 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081205 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090316 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20090323 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20090703 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20101209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101222 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110203 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4680566 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |