JP4550211B2 - カメラ - Google Patents
カメラ Download PDFInfo
- Publication number
- JP4550211B2 JP4550211B2 JP2000078745A JP2000078745A JP4550211B2 JP 4550211 B2 JP4550211 B2 JP 4550211B2 JP 2000078745 A JP2000078745 A JP 2000078745A JP 2000078745 A JP2000078745 A JP 2000078745A JP 4550211 B2 JP4550211 B2 JP 4550211B2
- Authority
- JP
- Japan
- Prior art keywords
- microcomputer
- camera
- shooting
- main subject
- shooting mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Description
【発明の属する技術分野】
本発明は、AF(オートフォーカス)実行に必要な測距装置を備えたカメラに係り、特に主要被写体を検出する主要被写体検出機能を用いて合焦時間の短縮が要求される条件下でもタイムラグを短縮して高速且つ高精度のAFが可能なカメラに関する。
【0002】
【従来の技術】
一般にカメラにおいては、撮影レンズを通過した被写体光束を撮像素子で受光し、撮像出力の評価値が極大になるようにフォーカスレンズ位置を調節する山登りコントラストAFや、撮影レンズとは異なる光路で被写体からの反射光を受光する公知のパッシブ測距やアクティブ測距に基づくAFを行う外光AF等のAF方式が採用されている。特に、外光AF方式については、銀塩カメラで多く採用されており、合焦精度は前述した山登りコントラストAFに及ばないものの、合焦時間が短いという特徴があるため、被写体までの距離を高速に測距することができるという利点がある。
【0003】
このようなカメラにおいては、どんな状態の被写体でも高精細な撮像画像を得るためには、特にAF機能が重要であり、従来より如何にAFの高速化且つ高精度化を図りAF機能を向上させるかの検討がなされている。
【0004】
一般に、AF機能は、カメラに搭載される測距装置の測距性能に大きく左右される。このような測距装置には、種々様々な測距方法があるが、特に最近では、AF機能向上化のため、複数の測距点を用いて測距することの可能な測距装置を備えたカメラも多く見受けられる。
このような測距装置を備えたカメラでは、例えば撮影画面の中央部とその左右の3点やこの3点に中央上下の2点を加えた5点の多点測距を行うカメラがあるが、最近ではそれ以上の測距点を用いて測距するカメラも製品化されており、測距点は増加する傾向にある。このような傾向に伴い、将来は殆ど全画面に測距点を配置する可能性もある。
【0005】
しかしながら、このように測距点が多くなると、どの被写体が主要被写体であるかの判別が困難になり、撮影者が意図しない被写体が主要被写体と判定されて意図しない被写体にピントや露出が合ってしまうという不都合の発生が多くなってしまう。
【0006】
そこで、従来より、このような不都合を解消するために、撮影者の視線を検出して見ている被写体を主要被写体とする視線検出方法が周知であるが、このような視線検出方法は、構造的に視線検出機構が複雑であるために、ごく一部のカメラしか採用されておらず、視線検出方法以外で主要被写体を検出する方法をカメラに応用することが、多点測距が可能なカメラにおいて強く望まれている。
このような要望に伴い、主要被写体検出機能を応用させたカメラに関する提案がいくつかなされている。
【0007】
例えば主要被写体を考慮すると、撮影画面内に人物が入っている場合には、その人物が主要被写体で有る場合が多い。これに応じた従来技術としては、画像処理技術によって撮影画面内に人物が入っていることを検出する技術が周知であり、例えば人物検出技術をカメラに適用したものとしては、例えば特開平6−30341号公報に開示された電子カメラ、あるいは本出願人によって提案された特願平11−264247号に開示されたカメラ等がある。
【0008】
前者の特開平6−30341号公報に開示された電子カメラでは、検出した主要被写体にピントを合わせるだけでなく、適切な露出処理を施す技術が開示されており、画面内に人物を検出すると、制御手段によって距離検出手段より得られた被写体までの距離の情報に基づいて撮影レンズの焦点距離と焦点位置と絞りを調節し、人物と顔全体が略被写界深度内に入るように露出を制御するものである。
【0009】
また、後者の特願平11−264247号に開示されたカメラでは、公知の人物検出技術をカメラに応用し、主要被写体の輪郭を検出して輪郭内部エリアを優先的に測距するようにしている。
【0010】
しなかしながら、前述の特開平6−30341号公報や特願平11−264247号に開示されたような主要被写体検出技術をカメラに応用した従来技術では、主要被写体検出を行うにかなりの演算時間を要してしまい、その結果、合焦時間(タイムラグともいう)が長くなってしまい、高速にAFを行うことができないという問題点があった。
【0011】
また主要被写体が人物であるポートレート撮影では、タイムラグが長くなってもさほど問題ではないが、移動している被写体を撮影する場合や、連写して撮影するような撮影条件下では、タイムラグが長いと、貴重なシャッターチャンスを逃す等の不都合が頻繁に生じてしまうという虞れもあった。
【0012】
このような問題点に対処すべく、タイムラグを短縮するための方法として、例えば測距装置に使用されるマイコンを高速のものを用いて構成する方法が考えられるが、これではコストアップ等の設計上の問題点がある。
【0013】
【発明が解決しようとする課題】
上記の如く、特開平6−30341号公報や特願平11−264247号に開示されたような主要被写体検出技術をカメラに応用した従来技術では、主要被写体検出を行うにかなりの演算時間を要してしまい、その結果、合焦時間(タイムラグともいう)が長くなってしまい、高速にAFを行うことができないという問題点があった。また主要被写体が人物であるポートレート撮影では、タイムラグが長くなってもさほど問題ではないが、移動している被写体を撮影する場合や、連写して撮影するような撮影条件下では、タイムラグが長いと、貴重なシャッターチャンスを逃す等の不都合が頻繁に生じてしまうという虞れもあった。また、このような問題点に対処すべく、タイムラグを短縮するための方法として、例えば測距装置に使用されるマイコンを高速のものを用いて構成する方法が考えられるが、これではコストアップ等の設計上の問題点があり、有効な手段とは言えない。
【0014】
そこで、本発明は上記問題点に鑑みてなされたもので、低コストで且つ簡単な構成で撮影画面内の被写体の中から主要被写体を判別でき、しかもタイムラグの短縮が必要とされる撮影条件下では確実にタイムラグを短縮させてシャッターチャンスを逃さないで撮影が可能なカメラの提供を目的とする。
【0015】
【課題を解決するための手段】
本発明の第1のカメラは、被写体像信号を出力する撮像手段と、前記撮像手段の出力に基づいて画面内の被写体の中から主要被写体を判別する判別手段と、複数の撮影モードを設定する設定手段と、前記設定手段において合焦までの時間の短縮を優先させる撮影モードが設定された場合には前記判別手段の動作を禁止し、前記撮影モードが設定されていない場合には、前記判別手段の動作を許可するように制御する判別方法変更手段と、を具備したことを特徴とする。
本発明の第2のカメラは、被写体像信号を出力する撮像手段と、前記撮像手段の出力に基づいて画面内の被写体の中から主要被写体を判別する判別手段と、複数の撮影モードを設定する設定手段と、前記設定手段において合焦までの時間の短縮を優先させる撮影モードが設定された場合には、前記撮影モードが設定されていない場合よりも前記判別手段の主要被写体判別の対象領域を狭く設定するように制御する判別方法変更手段と、を具備したことを特徴とする。
本発明の第3のカメラは、上記第1または第2のカメラにおいて、前記設定手段において設定される前記合焦までの時間の短縮が要求される撮影モードは、移動する被写体を撮影する動体AFモードか、連続的に撮影を行う連写モードか、撮影者によって手動で設定されたタイムラグ優先モードかの何れか一つであることを特徴とする。
本発明の第4のカメラは、被写体像信号を出力する撮像手段と、前記撮像手段の出力に基づいて画面内の被写体の中から主要被写体を判別する判別手段と、複数の撮影モードを設定する設定手段と、前記設定手段において連続的に撮影を行う連写モードが設定されている場合には、1枚目の撮影では前記判別手段を動作させ、2枚目以降の撮影では前記判別手段の動作を禁止するように制御する判別方法変更手段と、を具備したことを特徴とする。
【0020】
【発明の実施の形態】
以下、図面を参照して本発明の実施の形態を説明する。
【0021】
図1乃至図11は本発明のカメラの第1の実施の形態を示し、図1は本発明に係るカメラの概念を説明するための概念図、図2は本発明のカメラの全体構成例を示すブロック図、図3は図2のマイコンのメイン処理ルーチンを示すフローチャート、図4は図2のカメラに搭載された測距光学系の構成を説明するための説明図、図5は図2のAFエリアセンサの具体的構成例を示すブロック図、図6は撮影画面内の測距エリアを示す説明図、図7は図2のマイコンによるAF処理ルーチンを示すフローチャート、図8は図2のマイコンの主要被写体検出処理ルーチンを示すフローチャート、図9は図8の処理における主要被写体検出領域を示す説明図、図10は図2のマイコンによる全抽出領域の形状判定処理ルーチンを示すフローチャート、図11は図10の処理における主要被写体検出領域を示す説明図である。
【0022】
まず、本発明のカメラの概念について図1を参照しながら説明する。
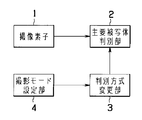
本発明に係るカメラは、図1に示すように、被写体像(光像)を取り込み結像する撮像光学系(撮影レンズ)を介して結像される光像を撮像して、被写体像信号を生成する撮像手段としての撮像素子1と、該撮像素子1からの被写体像信号に基づいて、主要被写体を判別する主要被写体判別部2と、撮影者によって撮影モードが手動又は自動で選択され設定される撮影モード設定部4と、該撮影モード設定部4にて選択された撮影モードに応じて、前記主要被写体判別部2の判別方法を変更するもので、例えば判別動作を禁止したり、又は単純化したり制御する判別方式変更部3とを含んで構成される。
【0023】
なお、前記撮像素子1は、例えばAFエリアセンサ12であり、該AFエリアセンサ12によって撮影レンズ(図示せず)を介して結像される光像を撮像して被写体像信号を生成する。
【0024】
また、前記撮影モード設定部4において、ユーザ操作によって設定される撮影モードとしては、例えば通常の撮影モードや、移動している被写体を撮影する撮影モードあるいは連写して撮影する連写撮影モード等があり、これらの撮影モードの中からいずれかの撮影モードが撮影者によって手動、又は自動で選択されるようになっている。
【0025】
例えば、判別方式変更部3は、前記撮影モード設定部4により選択された撮影モードが移動している被写体を撮影する撮影モード又は連写して撮影する連写撮影モードであり、つまりタイムラグの短縮が必要とされる撮影モードで有る場合には、撮影時、例えば前記主要被写体判別部2による判別動作を禁止したり、又は単純化したりするように判別方法の変更制御を行う。
【0026】
したがって、このように前記撮影モード設定部4により選択された撮影モードに応じて判別方法の変更制御を行うようにすれば、簡単な構成で、タイムラグの短縮が必要とされる撮影条件下でも確実にタイムラグを短縮させることが可能となり、シャッターチャンスを逃さない高速且つ高精度のAFが可能なカメラの実現が可能である。
【0027】
次に、このような本発明を実際のデジタルカメラ等のカメラに適応した場合の実施の形態を図2を参照しながら説明する。
第1の実施の形態:
(構成)
図2に示すように、本実施の形態のカメラには、制御部(以下、マイコンと称す)11が備えられている。このマイコン11は、カメラ全体の各種動作を制御するシステムコントローラであって、内部には、CPU(中央演算処理装置)11a,ROM11b,RAM11c,A/Dコンバータ11d,及びEEPROM11eを有している。
【0028】
CPU11aは、ROM11bに格納されたシーケンスプログラムに従って一連の動作を制御する。
【0029】
マイコン11内部のEEPROM11eは、AF,測光,露出演算等に関する補正データをカメラ毎に複数記憶している。さらに、該EEPROM11eには、後述する撮影画面内の主要被写体を検出するための各種バラメータ等が記憶されるようになっている。
【0030】
一方、撮像素子1としてのAFエリアセンサ12は、後述する測距光学系により形成される被写体像を撮像して電気信号であるセンサデータ(被写体像信号)に変換する。例えばAFエリアセンサ12は、受光領域12aである水平方向と垂直方向に二次元状に配置された受光素子群12aと、その処理回路12bと、定常光除去部12cとを含んで構成される。
【0031】
上記構成のAFエリアセンサ12では、受光素子(フォトダイオード)への入射光により発生する電荷を画素毎の画素回路により電圧に変換するとともに、増幅してマイコン11へと出力する。
【0032】
マイコン11は、AFエリアセンサ12の積分動作の制御、センサーデータの読み出し制御を行い、Aはエリアセンサ12からのセンサーデータを処理して、測距演算処理、主要被写体検出処理等を行うように制御する。
【0033】
また、AFエリアセンサ12には、画素毎に定常光除去部12cが設けられており、これらの定常光除去部12cは、マイコン11によって定常光を除去するか否かが切り換えられるようになっている。
【0034】
この場合、定常光除去動作は、後述する補助光を投光しながら行うことにより、投光成分による被写体反射光のみに対応する受光信号を検出することができるようになっている。
【0035】
フォーカスレンズ駆動部13は、撮影レンズ130の一部であるフォーカスレンズ14を駆動する。フォーカスレンズ駆動部13の駆動力は、図示しないレンズ駆動機構を介して撮影レンズ130内のフォーカスレンズ14に伝達されて該フォーカスレンズ14の駆動が行われる。また、レンズ駆動機構内には、フォーカスレンズエンコーダ15が配置され、該フォーカスレンズエンコーダは、前記フォーカスレンズ14の移動量を常時検出し、この移動量に対応するパルス信号を生成して、マイコン11に与える。
【0036】
マイコン11は、測距演算処理結果に基づき、フォーカスレンズ駆動部13に駆動信号を出力し、フォーカスレンズエンコーダ15の出力をモニター表示してフォーカスレンズ14の位置制御して焦点調整を行う。
【0037】
また、カメラには、マイコン11と接続される測光部13Aが設けられている。該測光部13Aは、撮影画面に対応し、複数に分割された測光用受光素子13aの発生する光電流信号を処理して測光出力信号を生成する。マイコン11は、この測光出力信号をA/Dコンバータ11dにより、アナログ→デジタル変換(AD変換)を行い測光・露出演算処理を行う。
【0038】
またマイコン11にはシャッタ駆動部16が接続されている。該シャッタ駆動部16は、マイコン11からの指示に基づいて、図示しないシャッタを駆動してフィルムに対する露出を行う。
【0039】
また、カメラには、マイコン11と接続されるストロボ回路部20が設けられている。このストロボ回路部20は、撮影時の補助光源としてストロボ20aを発光させるブロック回路である。このストロボ回路部20は、マイコン11によってその回路部20の充電、発光制御がなされるようになっている。また、ストロボ回路部20は、測距動作時のAF補助光としても動作するようになっている。
【0040】
さらにカメラの本体には、表示部回路部19が設けられ、この表示回路部19はマイコン11に接続されている。表示回路部19は、例えば液晶表示素子(LCD)等の表示素子を含んで構成されたもので、カメラ内部の情報を該表示素子により表示する。この表示回路部19による表示制御は、マイコン11によって制御されるようになっている。
【0041】
また、このカメラは、2段式のレリーズスイッチが採用されており、図2に示すようにファーストレリーズスイッチ17(以下、1RSWと称す)、セカンドレリーズスイッチ18(以下、2RSWと称す)が設けられている。これらの1RSW17、2RSW18は、レリーズボタンに連動したスイッチであって、レリーズボタンの第1段階の押し下げにより1RSW17がオンし、引き続いて第2段階の押し下げで2RSW18がオンするようなっている。各レリーズスイッチ17、18からのスイッチ操作信号は、マイコン11に供給される。
【0042】
マイコン11は、供給されたスイッチ操作信号から1RSW17のオンを認識すると、AF,測光動作を行うように制御し、さらに2RSW18のオンを認識すると、露出動作,フィルム巻き上げ動作を行うように制御する。この場合のフィルム巻き上げ動作は、フィルム駆動部21によって実施される。つまり、フィルム駆動部21は、マイコン11による指示制御により、オートロード、一駒巻き上げ、巻き戻しのフィルム駆動動作を行う。
【0043】
また、カメラには、ズーム機能を備えている。マイコン11に接続されたズームレンズ駆動部22は、マイコン11の指示制御により撮影レンズ130内のズームレンズのズーム動作を行う。この場合、ズームレンズ駆動部22は、投影レンズ130内のズームレンズの焦点距離情報を検出し、マイコン11に与える。これを受けマイコン11は、この焦点距離情報に基づきズームレンズ駆動部22に駆動信号を出力し、この焦点距離情報をモニタ表示してズームレンズの位置制御することでズーム調整が行われるようになっている。
【0044】
また、このようなカメラでの撮影動作は、撮影モード設定部23により設定された撮影モードに基づき実行される。
【0045】
撮影モード設定部23は、各種の撮影モードを自動あるいは手動で選択することが可能であり、例えば図示はしないがポートレート撮影モードSW、移動被写体の撮影に適する動体AFモードSW、連写を行うモードSW等の複数のスイッチが設けられている。つまり、撮影モード設定部23において、撮影者がこれら複数のスイッチから所望する撮影モードに応じたスイッチを操作することにより、いずれかの撮影モードを設定することが可能である。これを受け、マイコン11は、選択された撮影モードに基づいて、最適な露出制御、焦点制御を行う。また、本実施の形態では、撮影モード設定部23には、さらにタイムラグ優先モードSWが設けられており、このタイムラグ優先モードSWが押下されると、マイコン11は、主要被写体検出処理を禁止、又は単純化するように動作制御を行う。これにより、このタイムラグ優先モードが選択された場合には、タイムラグを短縮することが可能である。
【0046】
次に、上記構成のカメラにおいて、マイコン11によるメイン処理制御動作例を図3を参照しながら詳細に説明する。
【0047】
いま、図2に示すカメラの電源スイッチ(図示せず)をオンし、あるいは電池挿入を行い電源をオンしたものとする。すると、マイコン11が起動してカメラ動作を開始し、ROM11b内に格納されたシーケンスプログラムを実行する。
【0048】
マイコン11は、まずステップS101による処理で、カメラ内部の初期化動作を行い、次いでEEPROM11e内のAF,測光等の調整・補正データを読み出し、RAM11cに供給して展開することにより、該カメラを撮影可能状態にする。
【0049】
その後、マイコン11は、続くステップS102による判断処理で、レリーズスイッチ押下に伴い1RSW17がオンされたか否か判断し、オンされるまで待機する。その後、該ステップS101の判断処理で、レリーズボタンの押下に伴い1RSW17がオンしたと判断した場合には、次のステップS103に処理を移行し、そうでない場合には、ステップS108に処理を移行する。
【0050】
ステップS103による処理では、1RSW17がオンされた場合であるので、マイコン11は、1RSW17の押下に伴いAF動作を行うように制御し、次のステップS104の処理によって、測光部13Aにて測光・露出演算処理を行うように制御して、処理を次のステップS105に移行する。
【0051】
マイコン11は、ステップS105による判断処理で、レリーズスイッチ押下に伴い2RSW18がオンされたか否か判断し、2RSW18がオンしたと判断した場合には、次のステップS106に処理を移行し、オフであると判断した場合には、処理を前記ステップS102に戻して再び1RSW17がオンされるまで待機する。
【0052】
ステップS106による処理では、2RSW18が押下された場合であるので、マイコン11は、シャッタ駆動部16にてフィルムに露出するように制御し、続くステップS107の処理により、フィルム1駒巻き上げるようにフィルム駆動部21を制御し、一連の撮影動作を完了して処理を前記ステップS102に戻す。
【0053】
前記ステップS102により1RSW17がオンされていないものと判断された場合には、マイコン11は、ステップS108の判断処理で、1RSW17,2RSW18以外のスイッチの入力を検出し、続くステップS109の処理で、スイッチ入力に応じた処理を行うように制御する。例えば、ズームスイッチ(ZUSW19,ZDSW20)のアップ又はダウン入力に基づきズームアップ処理、又はズームダウン処理を行うように制御して、処理を前記ステップS102に戻す。
【0054】
次に、本実施の形態のカメラにおけるAF動作処理について、さらに詳細に説明する。
まず、上述したようにマイコン11によるステップS103にてAF動作処理を実行することになるが、AFを実行するためには測距処理が必要である。つまり、本実施の形態のカメラでは、図4に示す測距光学系によって測距動作が実行される。すなわち、本実施の形態のカメラは、外光パッシブ方式が採用され、この外光パッシブ方式により、被写体までの距離を測定する。
【0055】
具体的には、図4(a)に示すように受光レンズ101,102が基線長B(図4(b)参照)を隔てて配置され、被写体103の像を2像に分割してAFエリアセンサ12の受光領域12aに結像させる。
【0056】
そして、図4(b)に示すように、前記2像の相対的な位置差xは、三角測量の原理を用いることにより、受光レンズの焦点距離fと基線長Bとから導きだされ、その結果、被写体距離Lは下記の式によって導きだされる。
【0057】
L=(B・f)/x …(式1)
このような(式1)の測距演算処理は、マイコン11によって行われる。より具体的には、AFエリアセンサ12の受光領域12aに、測距エリアを設定して2像に対応するセンサデータを用いて相関演算処理(位相差検出処理)を行い、上記2像の相対的な位置差を検出する。これにより、被写体までの距離を確実に測定することが可能となる。
【0058】
次に、AFエリアセンサ12の具体的な構成について図5を参照しながら詳細に説明する。図5(a)はAFエリアセンサ12の全体構成例を示すブロック図、図5(b)は1つの画素の構成を示すブロック図である。
【0059】
本実施の形態のカメラに使用されるAFエリアセンサ12は、図5(a)に示すように、撮影画面に対応して複数の画素50が配置されており、全体構成としては、複数の画素50,スイッチ53、62,垂直シフトレジスタ54,固定パターンノイズ除去回路55,水平シフトレジスタ56,モニタ選択回路57,出力部(増幅器)60、61,及び読み出しエリア選択部63を含んで構成されている。
【0060】
また、1つの画素50の構成は、図5(b)に示すように受光素子であるフォトダイオード52と、フォトダイオード52の出力する信号電荷を蓄積する蓄積容量58と、蓄積容量58に蓄積された蓄積電圧を検出するための増幅回路51と、定常光成分を除去する定常光除去回路59とから構成されている。
【0061】
このような構成のAFエリアセンサ12において、前記モニタ選択回路57は、マイコン11からの指示による所定画素範囲について、その範囲内のピーク蓄積量を示すモニタ信号を作成して出力部61によりマイコン11に出力する。マイコン11は、供給されたモニタ信号をA/Dコンバータ(ADCと略して説明する場合もある)11dでA/D変換し、蓄積動作を制御する。
【0062】
読み出し選択部63は、マイコン11からの指示により水平シフトレジスタ56,垂直シフトレジスタ54を制御してセンサーデータを読み出す領域を設定する。
【0063】
水平シフトレジスタ56,垂直シフトレジスタ54は、各画素の信号出力をスイッチ53,62を介して選択し、得られたセンサーデータを出力部60よりマイコン11に出力する。マイコン11は、供給されたセンサーデータ出力をA/Dコンバータ11dでA/D変換し、RAM11cに記憶するように制御する。
【0064】
固定パターンノイズ除去回路55は、各画素の信号出力に含まれる固定パターンノイズを除去するための回路である。これにより、各画素の信号出力はノイズが低減されることにより、より鮮明で且つ正確な被写体像信号を得ることが可能である。
【0065】
また、本実施の形態において、上述した測距処理動作する場合の測距エリアは、図6に示されたものとなる。つまり、図6に示すようにカメラの撮影画面を撮影画面100とすると、測距エリアは、該撮影画面100内を例えば9つの分割し、測距エリア101〜109となる。したがって、測距動作処理する場合に、このように例えば9つの測距エリア101〜109をそれぞれ測距するようにしている。
【0066】
(作用)
次に、本発明の特徴となるマイコン11によるAF処理制御例について、さらに図7を参照しながら詳細に説明する。
いま、図3に示すステップS103による処理でAF処理が実行されると、マイコン11は、図7に示すAF処理ルーチンを実行させ、ステップS201に移行する。
【0067】
マイコン11は、このステップS201による処理で、AFエリアセンサ12に積分スタート信号を出力して、積分動作を行わせる。この場合、図5で説明したように、AFエリアセンサ12から所定範囲内のピーク(最も明るい画素)出力に対応するモニタ信号が出力され、マイコン11は、このモニタ信号を参照しながらAFエリアセンサ12の受光部の受光量が適正となるように積分時間を制御し、積分終了信号を出力する。
【0068】
その後、マイコン11は、次のステップS202の処理で、AFエリアセンサ12に読み出しクロックを出力してセンサーデータを読み出し、読み出したセンサーデータをA/Dコンバータ11dに取り込み、A/D変換した後にRAM11cに格納して、次のステップS203に処理を移行する。
【0069】
ステップS203の処理では、図6のように予め設定されている複数の測距エリア101〜109について、それぞれ測距演算処理を行わせる。この場合、測距演算は公知の位相差検出方法によって実施される。こうして、上記複数の測距エリアについてそれぞれ測距演算がなされることにより、測距データが得られるようになっている。
【0070】
そして、マイコン11は、続くステップS204の判断処理で、撮影モード設定部23で、タイムラグの短縮を優先する必要のある動体モードが設定されているか否かを判別する。ここで、動体モードとは、動体予測AF技術によって移動している被写体にピントを合わせる公知の技術である。この判断処理で、動体モードであると判定された場合には、処理をステップS214に移行し、動体モードでないと判定された場合には、処理を次のステップS205に移行する。
【0071】
マイコン11は、動体モードでないと判定した場合、ステップS205の処理で、複数の測距エリア101〜109で得られた測距データについて、所定の条件(信頼性の有無)を満足するか否かを判定し、満足しない測距エリアのデータについては、排除する。そして、信頼性の最も高い測距データのうちから、所定のアルゴリズムに基づいて複数の測距データより一つ、又は複数の測距データを選択する。なお、前記所定のアルゴリズムとは、例えば最も至近側の測距データを採用する最至近選択等種々の方法が考えられる。
【0072】
その後、マイコン11は、続くステップS206の処理により、前記選択された測距データの測距エリアを含む主要被写体検出領域を、AFエリアセンサ12の受光量域上に設定して主要被写体検出処理を行う。そして、得られた主要被写体検出結果が所定の条件(信頼性の有無)を満足するか否かを判別する。その後、主要被写体検出結果の信頼性が高い測距エリアの内で、同一のグループに属するものをまとめてグループ化を行い、主要被写体を確定して、次のステップS207の判断処理に移行する。
【0073】
マイコン11は、ステップS207の判断処理で、前記ステップS205で選択された一つ、又は複数の選択測距エリア(測距データ)のうちで主要被写体領域に含まれているものと判別されたものを最終的な測距データとして採用する。つまり、選択された測距エリアが主要被写体であるか否かの判別を行い、選択測距エリアが主要被写体であれば、ステップS212に移行し、そうでなければ、次のステップS208に移行する。
【0074】
ステップS208では、選択測距エリアが主要被写体でない場合であるので、マイコン11は、他の測距エリアを選択し、次ぎのステップS209の判断処理で、撮影画面内の全ての測距エリアについて主要被写体であるか否かの判別が終了したか否かの判別を行う。この場合、撮影画面内の全ての測距エリアについて主要被写体でない判定がなされた場合には、処理をステップS210に移行し、また全ての測距エリアについて終了していない場合には、前記ステップS206に処理を戻し、新たに選択された測距エリアについて主要被写体検出処理を行う。
【0075】
マイコン11は、ステップS210の処理では、前記ステップS205の処理とは異なり、主要被写体検出領域を測距エリア毎に限定せず、撮影画面内の全ての画像について主要被写体検出処理を行う。
【0076】
そして、続くステップS211の処理により、検出された主要被写体領域に対して、新たな測距エリアを設定し、測距演算処理を行う。
【0077】
その後、マイコン11は、続くステップS212の処理で、フォーカスエンコーダ15からのパルス信号からフォーカスレンズ14の合焦までの移動量(駆動量)を演算処理し、次のステップS213の処理で、測距結果に基づきフォーカス連度駆動を制御してAF動作処理制御を完了する。
【0078】
一方、前記ステップS204の判断処理で、動体モードであると判定された場合には、マイコン11は、ステップS214の判断処理で、動体予測の実行に必要な所定回数の測距が終了したか否かを判定し、終了していない場合には、処理をステップS202に戻し、つまりステップS202〜ステップS204のルーチンを繰り返す。また、所定回数測距が終了した場合には、次のステップS215の処理で、公知の技術によって動体予測演算処理を行い、被写体の動きを予測する。具体的には、図4(b)で説明したように、位相差xのデータから未来の位相差xを予測して距離データを得る。
その後、マイコン11は、次のステップS216の処理により、移動被写体が観測された測距エリアを選択し、処理を前記ステップS212に移行して、同様のステップS212,213の処理を順次行い、AF動作処理を完了する。
【0079】
なお、前記ステップS207による主要被写体検出処理ルーチンでは、特に主要被写体として人物を想定して検出処理を行うようになっている。このように人物を主要被写体として検出する技術は、前述の特願平11−264247号にも詳細に記載されている。
【0080】
また、AFエリアセンサ12により2つの画像が得られることになるが、主要被写体検出処理に使用する画像データ(センサデータ)はどちらか一方の画像でも良いし、両方の画像を使用しても良い。
【0081】
AFエリアセンサ12のセンサデータは、マイコン11内のRAM11cに格納されており、マイコン11はこのセンサデータに基づき、後述する主要被写体検出処理を行う。
【0082】
次に、上記マイコン11による主要被写体検出処理制御例について、さらに図8を参照しながら詳細に説明する。
いま、図7に示すステップS207によって主要被写体検出処理が実行されると、マイコン11は、図8に示す主要被写体検出処理ルーチンを開始し、つまり、ステップS301の処理で、選択された測距エリアについてそれぞれ主要被写体検出領域を設定する(図9(a)参照)。そして、設定された主要被写体領域について、以降のステップS302〜304の処理を行うように制御する。
【0083】
ステップS302の処理では、平滑化処理を行う。つまり、マイコン11は、画像中のランダムノイズを除去する処理であって、例えばフィルタ処理やフーリエ変換によってランダムノイズを除去して、次のステップS303に移行する。
【0084】
ステップS303の処理では、2値化処理を行い、画像信号に対して所定のしきい値以上の部分を抽出して2値画像を求め、次のステップS304に処理を移行する。
【0085】
ステップS304の処理では、ラベリング処理を行い、例えば、2値化画像において同じ輝度値(0,1)の画素が互いに連結している連結部分の塊に対してラベリングを行う。つまり、異なる連結部分に対して異なるラベルを貼り付けて区別して領域(連結領域)を分離する(図9(b)参照)。
【0086】
その後、マイコン11は、処理をステップS305に移行し、このステップS305の処理で、形状判定処理を行う。この場合、画像の形状を判別して主要被写体を抽出する。詳細は後述するが、1つ又は複数の選択された測距エリアが、それぞれ主要被写体であるか否かを示すデータを確定し、続くステップS306に処理を移行する。
【0087】
ステップS306の判断処理では、前記1つ又は複数の設定された主要被写体検出領域について、全ての処理を行ったか否かを判別し、終了した場合には該主要被写体検出処理を完了し、終了していない場合には処理をステップS302に戻し、別の領域について再び処理を行う。
【0088】
次に、前記ステップS305による形状判定処理について、さらに図10を参照しながら詳細に説明する。
上述した図8に示すステップS305による形状判定処理では、連結領域の面積は、その連結領域の属する画素の個数である。また、周囲長は、連結領域のまわりの境界に位置する画素の個数となっている。ただし、斜め方向は水平,垂直方向に対して√2倍に補正する。
【0089】
画像の形状を判定するために、以下の係数e(形状判定値)が使用される。ここで、係数eを求める式を示すと、
係数e=(周囲長)^2/(面積) …(式2)
となる。係数eは、形状が円形の時に最小値を示し、形状が複雑になるほど大きい値を示す。このような関係であることから、人物の顔は略円形に近いと考えられるので、上記係数eと所定値とを比較して対象画像が人物の顔であるか否かを判定する。
【0090】
また、前記連結領域面積も所定値と比較して、対象画像が人物の顔であるか否かを判定する。この場合の前記所定値は、個人差や年齢を含めて統計的に求めた数値を採用することが望ましい。
【0091】
次に、このような形状判定処理を実行するマイコン11の制御動作例を図8を参照しながら詳細に説明する。
いま、図8に示すステップS305によって形状判定処理が実行されると、マイコン11は、図10に示す形状判定処理ルーチンを開始し、つまり、ステップS401の処理で、図8のステップS304でのラベリング処理による抽出領域があるか否かを判別し、抽出領域がない場合には、ステップS409に処理を移行し、ある場合には、次のステップS402に処理を移行する。
【0092】
ステップS402の処理では、抽出領域の面積Sを求め、所定範囲内であるか否かを判別する。所定範囲は、主要被写体である人物の顔の大きさが距離と焦点距離で変化するのに合わせ、測距結果である被写体距離Lと撮影レンズの焦点距離によって変化させている。マイコン11は、測距結果の被写体距離Lとズーム駆動部22からのズーム情報に基づいても基準人物被写体の顔の面積SLを算出し、このようにして求めた面積SLに対して所定の幅をもたせて所定範囲を設定する。
【0093】
そして、マイコン11は、次のステップS403の判断処理で、前記抽出領域面積Sが所定範囲内であるか否かを判別し、所定範囲内である場合には次のステップS404に処理を移行し、そうでない場合にはステップS409に処理を移行する。
【0094】
ステップS404の処理では、前記(式2)から形状判定値eを算出し、続くステップS405の判断処理で、算出した形状判定値eが所定範囲内であるか否かを判別する。この場合、所定範囲内である場合にはステップS406に処理を移行し、そうでない場合には処理をステップS409に移行する。
【0095】
そして、マイコン11は、ステップS406の処理によって、人物であると判定しその結果をメモリする。
【0096】
図11は図9(a)における主要被写体401(人物の顔)に合致している測距エリア105が選択された場合に対応する2値画像を示している。この場合、円形と形状判定がなされ、人物(主要被写体)と判定される。
【0097】
その後、マイコン11は、次のステップS407の判断処理により、全抽出領域について形状判定がなされたか否かを判別し、終了していると判別された場合には該形状判定処理を完了し、そうでない場合には処理をステップS408に移行する。
【0098】
ステップS408の処理では、全抽出領域について形状判定処理が成されていない場合なので、次の抽出領域を設定して、処理を前記ステップS402に戻し、再度該ステップS402移行の処理を繰り返し実行するように制御する。
【0099】
一方、ステップS409による処理では、人物以外の被写体と判定しメモリするように制御し、該形状判定処理を完了する。この場合、図9(a)の撮影シーンにおける被写体402(測距エリア102,103に対応)は円形ではないので、人物(主要被写体)ではないと判定されることになる。
【0100】
なお、上述したマイコン11によるAF動作処理ルーチンにおいて、測距エリアから主要被写体領域を求められなかった場合の処理であるステップS210(図7参照)では、撮影画面に対応する受光領域全体のセンサデータについて主要被写体検出を行う。そして、その結果得られた主要被写体領域内に複数の測距エリアを設定するようになっている。またこれらの複数の測距エリアの測距結果は、平均処理や最至近選択等の処理により、1つの測距データに求められる(図8に示すステップS211)。
【0101】
なお、前述した主要被写体検出処理では、円形画像を人物の顔として検出しているが、これは一例を示しており、これに限定されず種々の方法が考えられる。
例えば、予め用意されている人物形状の形状データと取得画像とについて、公知のテンプレートマッチング方法を用いることにより、検出するように処理を行っても良い。あるいは、AFエリアセンサ12としてカラータイプの撮像素子を使用して、センサデータを色処理することにより、人物に相当する肌色領域を検出するように処理を行っても良い。また、人物以外の形状データを用いれば、人物以外の被写体も検出することが可能である。
【0102】
(効果)
したがって、本実施の形態では、タイムラグの短縮が必要とされる撮影モード(動体モード)で有る場合に、マイコン11によって主要被写体検出処理を単純化するように制御することにより、確実にタイムラグを短縮することができる。
よって、貴重なシャッターチャンスを逃すこともなく確実に撮影することができ、高精度な撮影画像を得ることが可能となる。また、高速なマイコンを使用せずとも確実に主要被写体検出処理制御を行うことができるので、低コスト化を図ることも可能である。
【0103】
第2の実施の形態:
図12は本発明に係るカメラの第2の実施の形態を示し、該カメラに搭載されたマイコンによるAF処理ルーチンを示すフローチャートである。なお、図12に示すフローチャートは、前記第1の実施の形態の図7に示すフローチャートと同様の処理及び判断処理については、同一のステップS番号を付して説明を省略し、異なる処理のみを説明する。
【0104】
(構成)
本実施の形態のカメラの全体構成としては、図2に示す前記第1の実施の形態と略同様であるが、マイコン11によるAF処理の制御内容が前記第1の実施の形態と異なっている。つまり、本実施の形態では、図3に示すAF処理ルーチンのステップS103のみが前記第1の実施の形態とは異なり、他の処理制御については同様である。
【0105】
つまり、本実施の形態のカメラに搭載されたマイコン11は、AF処理を実行する場合に、図12に示すAF処理ルーチンを実行する。
【0106】
この場合、このAF処理ルーチンでは、図7に示すAF処理ルーチンにおけるステップS204に替えて新たなステップS217の処理を設けるとともに、ステップS205による処理をステップS203の次に行うように配置し、このステップS205の処理の後に前記新たに設けたステップS217の処理を行うように配置しており、さらに、ステップS214,215,216の処理を削除している。
【0107】
(作用)
本実施の形態において、マイコン11は、図12に示すように、前記ステップS205の処理で、複数の測距データより一つ、又は複数の測距データが選択された後、ステップS217に移行し、該ステップS217の判断処理で、撮影モード設定部23で、タイムラグの短縮を優先する必要のある連写モードが設定されているか否かを判別する。ここで、連写モードとは、2RSW18が押されている間中は連続撮影を行う撮影モードである。この判断処理で、連写モードであると判定された場合には、処理をステップS212に移行し、連写モードでないと判定された場合には、処理を次のステップS206に移行する。
【0108】
その後のマイコン11による制御については、図7に示すAF処理と同様である。
【0109】
(効果)
したがって、本実施の形態によれば、タイムラグの短縮が必要とされる撮影モードが連写モードで有る場合にも、マイコン11によって主要被写体検出処理を単純化するように制御することにより、確実にタイムラグを短縮することができ、前記第1の実施の形態と同様の効果を得ることが可能となる。
【0110】
第3の実施の形態:
図13は本発明に係るカメラの第3の実施の形態を示し、該カメラに搭載されたマイコンによるAF処理ルーチンを示すフローチャートである。なお、図13に示すフローチャートは、前記第2の実施の形態の図12に示すフローチャートと同様に処理及び判断処理については、同一のステップS番号を付して説明を省略し、異なる処理のみを説明する。
【0111】
(構成)
本実施の形態のカメラの全体構成としては、図2に示す前記第1の実施の形態と略同様であるが、マイコン11によるAF処理の制御内容が前記第1の実施の形態と異なっている。つまり、本実施の形態では、図3に示すAF処理ルーチンのステップS103のみが前記第1の実施の形態とは異なり、他の処理制御については同様である。
【0112】
つまり、本実施の形態のカメラに搭載されたマイコン11は、AF処理を実行する場合に、図13に示すAF処理ルーチンを実行する。
【0113】
この場合、このAF処理ルーチンは、前記第2の実施の形態の図12に示すAFルーチンと略同様であるが、新たにステップS218による判断処理が追加されている。
【0114】
(作用)
本実施の形態において、図13に示すようにマイコン11は、前記第2の実施の形態と同様に前記ステップS205の処理で、複数の測距データより一つ、又は複数の測距データが選択された後、ステップS217に移行し、該ステップS217の判断処理で、撮影モード設定部23で、タイムラグの短縮を優先する必要のある連写モードが設定されているか否かを判別する。ここで、連写モードとは、2RSW18が押されている間中は連続撮影を行う撮影モードである。この判断処理で、連写モードであると判定された場合には、処理をステップS218に移行し、連写モードでないと判定された場合には、前記実施の形態と同様に処理を次のステップS206に移行して、以降同様に制御する。
【0115】
前記ステップS217の判断処理で連写モードが設定されている場合、マイコン11は、該ステップS218の判断処理で、1枚目の撮影であるか否かを判定し、1枚目の撮影である場合にはステップS206に移行して主要被写体検出処理を行わせ、以降前記と同様に処理を行い、逆に1枚目の撮影でない場合には、処理をステップS212に移行する。すなわち、2枚目以降は主要被写体検出を行わないように制御する。
【0116】
その後のマイコン11による制御については、図12に示すAF処理と同様である。
【0117】
(効果)
したがって、本実施の形態によれば、タイムラグの短縮が必要とされる連写モードで有る場合にも、マイコン11によって主要被写体検出処理を単純化するように制御することにより、確実にタイムラグを短縮することができる。ただし、1枚目のみ主要被写体検出処理を行い、2枚目以降はタイムラグ短縮を重視して主要被写体検出処理を行わない。すなわち、前記第2の実施の形態よりもタイムラグ短縮効果は下がるが、主要被写体検出効果を向上させるという利点がある。
【0118】
第4の実施の形態:
図14は本発明に係るカメラの第4の実施の形態を示し、該カメラに搭載されたマイコンによるAF処理ルーチンを示すフローチャートである。なお、図14に示すフローチャートは、前記第2の実施の形態の図12に示すフローチャートと同様に処理及び判断処理については、同一のステップS番号を付して説明を省略し、異なる処理のみを説明する。
【0119】
(構成)
本実施の形態のカメラの全体構成としては、図2に示す前記第1の実施の形態と略同様であるが、マイコン11によるAF処理の制御内容が前記第1の実施の形態と異なっている。つまり、本実施の形態では、図3に示すAF処理ルーチンのステップS103のみが前記第1の実施の形態とは異なり、他の処理制御については同様である。
【0120】
つまり、本実施の形態のカメラに搭載されたマイコン11は、AF処理を実行する場合に、図14に示すAF処理ルーチンを実行する。
【0121】
この場合、このAF処理ルーチンは、前記第2の実施の形態の図12に示すAFルーチンと略同様であるが、ステップS217に替えて新たにステップS219による判断処理が設けられている。
(作用)
本実施の形態において、図14に示すようにマイコン11は、前記第3の実施の形態と同様に前記ステップS205の処理で、複数の測距データより一つ、又は複数の測距データが選択された後、ステップS219に処理を移行する。
【0122】
このステップS219による判断処理では、撮影モード設定部23で、撮影者がタイムラグの短縮を優先するタイムラグ優先スイッチが押下されたか否かを判別し、押下されてオンしている場合には、処理をステップS212に移行し、押下されていない場合には、前記実施の形態と同様に処理を次のステップS206に移行して、以降同様に制御する。
【0123】
その後のマイコン11による制御については、図12に示すAF処理と同様である。
【0124】
(効果)
したがって、本実施の形態によれば、撮影モードに拘わらず撮影者の意想でタイムラグの短縮が必要とされるモードが選択されている場合でも、確実にタイムラグを短縮することができ、前記第2の実施の形態と同様の効果が得られる。
第5の実施の形態:
図15は本発明に係るカメラの第5の実施の形態を示し、該カメラに搭載されたマイコンによるAF処理ルーチンを示すフローチャートである。なお、図15に示すフローチャートは、前記第2,4の実施の形態の図12,図14に示すフローチャートと同様に処理及び判断処理については、同一のステップS番号を付して説明を省略し、異なる処理のみを説明する。
【0125】
(構成)
本実施の形態のカメラの全体構成としては、図2に示す前記第1の実施の形態と略同様であるが、マイコン11によるAF処理の制御内容が前記第1の実施の形態と異なっている。つまり、本実施の形態では、図3に示すAF処理ルーチンのステップS103のみが前記第1の実施の形態とは異なり、他の処理制御については同様である。
【0126】
つまり、本実施の形態のカメラに搭載されたマイコン11は、AF処理を実行する場合に、図15に示すAF処理ルーチンを実行する。
【0127】
この場合、このAF処理ルーチンは、前記第2の実施の形態の図12に示すAFルーチンと略同様であるが、図12に示すステップS217の処理と図14に示すステップS219による処理を、ステップS209,210との処理との間に配置したことが特徴である。
【0128】
(作用)
本実施の形態において、図15に示すようにマイコン11は、ステップS209の判断処理で、撮影画面内の全ての測距エリアについて主要被写体であるか否かの判別が終了したか否かの判別を行い、撮影画面内の全ての測距エリアについて主要被写体でない判定がなされた場合には、処理をステップS217に移行し、また全ての測距エリアについて終了していない場合には、前記ステップS206に処理を戻し、新たに選択された測距エリアについて主要被写体検出処理を行う。
【0129】
その後、マイコン11は、ステップS217の判断処理で、撮影モード設定部23で、タイムラグの短縮を優先する必要のある連写モードが設定されているか否かを判別し、連写モードであると判定された場合には、処理をステップS212に移行し、連写モードでないと判定された場合には、前記第4の実施の形態にた用いたステップ219の処理に移行する。
【0130】
このステップS219による判断処理では、撮影モード設定部23で、撮影者がタイムラグの短縮を優先するタイムラグ優先スイッチが押下されたか否かを判別し、押下されてオンしている場合には、処理をステップS212に移行し、押下されていない場合には、処理を次のステップS210に移行して、以降同様に制御する。
【0131】
その後のマイコン11による制御については、図12に示すAF処理と同様である
つまり、全てのモードで主要被写体検出処理(ステップS206による処理)が実行されるが、ステップS217で連写モード、あるいはタイムラグ優先スイッチがオンしている場合には、ステップS210,211によるそれぞれの処理を実行しない。すなわち、主要被写体検出処理を単純化している。
【0132】
なお、本実施の形態は、主要被写体検出アルゴリズムを単純化してタイムラグを短縮する一例であるが、これに限定されることはなく、単純化できれば他の方法を採用しても良い。例えば図8に示すステップS306で判定される領域を減らすように処理を行っても良い。すなわち、主要被写体検出領域を中央付近に限定しても良いことである。
【0133】
(効果)
したがって、本実施の形態によれば、マイコン11によって主要被写体検出処理を単純化するように制御することにより、確実にタイムラグを短縮することができ、前記第2,4の実施の形態よりもタイムラグ短縮効果の点で有効である。
【0134】
なお、本発明に係る各実施の形態では、主要被写体アルゴリズムとして、図8〜図11で説明した方法以外の方法を採用しても良い。
【0135】
また、本発明に係る各実施の形態では、前記外光式AFの測距方式として、パッシブ方式を採用したことについて説明したが、本発明はこれに限定されるものではなく、例えばTTLパッシブ方式を一眼レフレックスカメラに適用して構成しても良い。
【0136】
さらに、本発明に係る各実施の形態では、主に人物を主要被写体として検出する例を説明したが、検出パターンを変更することで人物以外にも適用できるカメラを構成することも可能である。
【0137】
[付記項]
(付記項1) 被写体像信号を出力する撮像手段と、
前記撮像手段の出力に基づいて主要被写体を判別する判別手段と、
合焦時間の短縮が要求される撮影条件下では、前記判別手段の判別方法を変更する変更制御手段と、
を具備したことを特徴とするカメラ。
【0138】
(付記項2) 前記合焦時間の短縮が要求される撮影条件下は、移動する被写体を撮影する条件、又は連写して撮影する条件、又は撮影者が手動で選択する条件であることを特徴とする付記項1に記載のカメラ。
【0139】
(付記項3) 前記変更制御手段は、前記合焦時間の短縮が要求される撮影条件下では、前記判別手段の動作を禁止、又は単純化するように制御することを特徴とする付記項1に記載のカメラ。
【0140】
(付記項4) 前記変更制御手段は、前記撮影条件が連写して撮影する条件、又は撮影者が手動で選択する条件である場合には、前記判別手段のアルゴリズムを短縮化し、一方、移動している被写体を撮影する条件で有る場合には、移動が観察された被写体を主要被写体とするように前記判別手段の動作を単純化させることを特徴とする付記項3に記載のカメラ。
【0141】
(付記項5) 前記変更制御手段は、前記撮影条件が連写して撮影する条件である場合には、1枚目の撮影では前記判別手段を動作させ、2枚目以降は禁止するように制御することを特徴とする付記項3に記載のカメラ。
【0142】
【発明の効果】
以上、述べたように本発明によれば、低コストで且つ簡単な構成で撮影画面内の被写体の中から主要被写体を判別でき、しかもタイムラグの短縮が必要とされる撮影条件下では確実にタイムラグを短縮させてシャッターチャンスを逃さないで撮影が可能なカメラの提供を目的とする。
【図面の簡単な説明】
【図1】本発明のカメラの第1の実施の形態を示し、該カメラの概念を説明するための概念図。
【図2】本発明のカメラの全体構成例を示すブロック図。
【図3】図2のマイコンのメイン処理ルーチンを示すフローチャート。
【図4】図2のカメラに搭載された測距光学系の構成を説明するための説明図。
【図5】図2のAFエリアセンサの具体的構成例を示すブロック図。
【図6】撮影画面内の測距エリアを示す説明図。
【図7】図2のマイコンによるAF処理ルーチンを示すフローチャート。
【図8】図2のマイコンの主要被写体検出処理ルーチンを示すフローチャート。
【図9】図8の処理における主要被写体検出領域を示す説明図。
【図10】図2のマイコンによる全抽出領域の形状判定処理ルーチンを示すフローチャート。
【図11】図10の処理における主要被写体検出領域を示す説明図。
【図12】本発明のカメラの第2の実施の形態を示し、AF処理ルーチンを示すフローチャート。
【図13】本発明のカメラの第3の実施の形態を示し、AF処理ルーチンを示すフローチャート。
【図14】本発明のカメラの第4の実施の形態を示し、AF処理ルーチンを示すフローチャート。
【図15】本発明のカメラの第5の実施の形態を示し、AF処理ルーチンを示すフローチャート。
【符号の説明】
1…撮像素子、
2…主要被写体判別部、
3…判別方式変更部、
4…撮影モード設定部、
11…制御部(マイコン)、
11a…中央処理装置(CPU)、
11b…ROM、
11c…RAM、
11d…A/Dコンバータ(ADC)、
11e…EEPROM、
12…AFエリアセンサ、
12a…受光領域、
12b…受光信号処理回路、
12c…定常光除去部、
13…フォーカスレンズ駆動部、
13A…測光部、
13a…測光用受光素子、
14…フォーカスレンズ、
15…フォーカスレンズエンコーダ、
16…シャッタ駆動部、
17…1RSW、
18…2RSW、
19…表示回路部、
20…ストロボ回路部、
21フィルム駆動部、
22…ズームレンズ駆動部、
23…撮影モード設定部、
Claims (4)
- 被写体像信号を出力する撮像手段と、
前記撮像手段の出力に基づいて画面内の被写体の中から主要被写体を判別する判別手段と、
複数の撮影モードを設定する設定手段と、
前記設定手段において合焦までの時間の短縮を優先させる撮影モードが設定された場合には前記判別手段の動作を禁止し、前記撮影モードが設定されていない場合には、前記判別手段の動作を許可するように制御する判別方法変更手段と、
を具備したことを特徴とするカメラ。 - 被写体像信号を出力する撮像手段と、
前記撮像手段の出力に基づいて画面内の被写体の中から主要被写体を判別する判別手段と、
複数の撮影モードを設定する設定手段と、
前記設定手段において合焦までの時間の短縮を優先させる撮影モードが設定された場合には、前記撮影モードが設定されていない場合よりも前記判別手段の主要被写体判別の対象領域を狭く設定するように制御する判別方法変更手段と、
を具備したことを特徴とするカメラ。 - 前記設定手段において設定される前記合焦までの時間の短縮が要求される撮影モードは、移動する被写体を撮影する動体AFモードか、連続的に撮影を行う連写モードか、撮影者によって手動で設定されたタイムラグ優先モードかの何れか一つであることを特徴とする請求項1または2に記載のカメラ。
- 被写体像信号を出力する撮像手段と、
前記撮像手段の出力に基づいて画面内の被写体の中から主要被写体を判別する判別手段と、
複数の撮影モードを設定する設定手段と、
前記設定手段において連続的に撮影を行う連写モードが設定されている場合には、1枚目の撮影では前記判別手段を動作させ、2枚目以降の撮影では前記判別手段の動作を禁止するように制御する判別方法変更手段と、
を具備したことを特徴とするカメラ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000078745A JP4550211B2 (ja) | 2000-03-21 | 2000-03-21 | カメラ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000078745A JP4550211B2 (ja) | 2000-03-21 | 2000-03-21 | カメラ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001264624A JP2001264624A (ja) | 2001-09-26 |
| JP2001264624A5 JP2001264624A5 (ja) | 2007-03-01 |
| JP4550211B2 true JP4550211B2 (ja) | 2010-09-22 |
Family
ID=18596114
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000078745A Expired - Fee Related JP4550211B2 (ja) | 2000-03-21 | 2000-03-21 | カメラ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4550211B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003198925A (ja) | 2001-12-25 | 2003-07-11 | Canon Inc | 撮像装置及び撮像方法及び制御プログラム及び記録媒体 |
| EP1681533A1 (de) | 2005-01-14 | 2006-07-19 | Leica Geosystems AG | Verfahren und geodätisches Gerät zur Vermessung wenigstens eines Zieles |
| US8970680B2 (en) | 2006-08-01 | 2015-03-03 | Qualcomm Incorporated | Real-time capturing and generating stereo images and videos with a monoscopic low power mobile device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62269915A (ja) * | 1987-04-27 | 1987-11-24 | Minolta Camera Co Ltd | 自動焦点調節装置 |
| JPH0229636A (ja) * | 1988-07-19 | 1990-01-31 | Canon Inc | カメラ |
| JPH0738796A (ja) * | 1993-07-21 | 1995-02-07 | Mitsubishi Electric Corp | 自動合焦装置 |
| JPH09297335A (ja) * | 1996-03-06 | 1997-11-18 | Olympus Optical Co Ltd | カメラの自動焦点調節装置 |
| JPH11190816A (ja) * | 1997-12-25 | 1999-07-13 | Canon Inc | 光学装置及び測距点選択方法 |
-
2000
- 2000-03-21 JP JP2000078745A patent/JP4550211B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62269915A (ja) * | 1987-04-27 | 1987-11-24 | Minolta Camera Co Ltd | 自動焦点調節装置 |
| JPH0229636A (ja) * | 1988-07-19 | 1990-01-31 | Canon Inc | カメラ |
| JPH0738796A (ja) * | 1993-07-21 | 1995-02-07 | Mitsubishi Electric Corp | 自動合焦装置 |
| JPH09297335A (ja) * | 1996-03-06 | 1997-11-18 | Olympus Optical Co Ltd | カメラの自動焦点調節装置 |
| JPH11190816A (ja) * | 1997-12-25 | 1999-07-13 | Canon Inc | 光学装置及び測距点選択方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001264624A (ja) | 2001-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2001004909A (ja) | 自動焦点調節装置を有するカメラ | |
| JP2004109690A (ja) | カメラシステムおよびカメラ | |
| JP5171468B2 (ja) | 撮像装置及び撮像装置の制御方法 | |
| JP6049333B2 (ja) | 焦点検出装置及び焦点検出装置の制御方法 | |
| JP2002051255A (ja) | 主要被写体検出カメラ | |
| JP2008199486A (ja) | 一眼レフレックス型の電子撮像装置 | |
| JP2014013368A (ja) | 撮像装置及びその制御方法 | |
| JP2003029135A (ja) | カメラ、カメラシステムおよび撮影レンズ装置 | |
| JP5056168B2 (ja) | 焦点調節装置および撮像装置 | |
| JP4398017B2 (ja) | 測距装置 | |
| JP2009294416A (ja) | 撮像装置およびその制御方法 | |
| JP2001249265A (ja) | 測距装置 | |
| JP2001141982A (ja) | 電子カメラの自動焦点調節装置 | |
| JP4550211B2 (ja) | カメラ | |
| JP2001141984A (ja) | 電子カメラの自動焦点調節装置 | |
| JP5359150B2 (ja) | 撮像装置 | |
| JP2009175310A (ja) | 焦点検出装置、焦点検出方法およびカメラ | |
| JP2014197141A (ja) | 撮像装置 | |
| JP2014206711A (ja) | 撮像装置およびその制御方法 | |
| JP2005173254A (ja) | カメラシステム | |
| JP2001264621A (ja) | 測距装置 | |
| JP2017021177A (ja) | レンズケラレ時の測距点、測距エリア遷移方法 | |
| JP2006119454A (ja) | 撮像装置および撮像装置の測光方法 | |
| JP2001100087A (ja) | 多点測距装置 | |
| JP3955201B2 (ja) | オートフォーカスカメラ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070112 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100301 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100323 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100524 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100615 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100708 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130716 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |