JP4533147B2 - 近接センサ - Google Patents
近接センサ Download PDFInfo
- Publication number
- JP4533147B2 JP4533147B2 JP2004550804A JP2004550804A JP4533147B2 JP 4533147 B2 JP4533147 B2 JP 4533147B2 JP 2004550804 A JP2004550804 A JP 2004550804A JP 2004550804 A JP2004550804 A JP 2004550804A JP 4533147 B2 JP4533147 B2 JP 4533147B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- proximity sensor
- mask
- detector
- field
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/04—Systems determining the presence of a target
Description
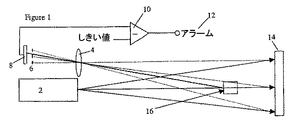
図1は、単純な近接センサとして使用される、本発明による本発明の実施形態を示している。スポット投影器2は、場にスポットのアレイを投影する。レンズ4は、場から反射された光を集め、検出器8上のマスク6を通してその焦点を合わせる。検出器8は、アラーム12を制御する閾値回路10に接続される。
Claims (11)
- 光のスポットのアレイで場を照明するための照明手段、
前記場から反射された光を受け取るように配置された検出器、及び、
前記場から前記検出器までの光の光路内に置かれたマスク
を備える近接センサであって、
前記マスクが、透過部及び非透過部を有し、使用されるとき、前記センサからの第一の範囲の距離内のターゲットから反射された光は、前記マスクを通して前記検出器に伝播され、第二の範囲の距離からの光は、前記マスクを通して伝播されないように、前記照明手段及び検出器とともに配置され、
前記照明手段は、光導波路の入力面の一部を照明するように配置された光源を備え、前記光導波路は、実質的に反射性の側面を持つ管を備え、前記場に向けて前記光源の別個の映像のアレイを投影するように、投影光学系とともに配置される
ことを特徴とする近接センサ。 - 前記照明手段が、前記場を赤外光のスポットで照明する
ことを特徴とする請求項1に記載の近接センサ。 - 前記照明手段が、所定の周波数で変調され、該所定の周波数においてフィルタが前記検出器に適用される
ことを特徴とする請求項1又は2に記載の近接センサ。 - 前記マスクは、前記センサからの複数の範囲の距離を定め、各距離範囲内のターゲットからの異なる量の反射光を伝播するようにされた
ことを特徴とする請求項1〜3のいずれか1項に記載の近接センサ。 - 前記照明手段は、複数のスポットを異なる変調周波数で投影するようにされ、前記マスクは、各範囲の距離において異なる変調周波数を前記検出器に伝播するようにされた
ことを特徴とする請求項4に記載の近接センサ。 - 前記マスクは、複数の透過ウィンドウを持つ実質的に非伝播性の材料を備える
ことを特徴とする請求項1〜5のいずれか1項に記載の近接センサ。 - 前記光導波路が、正方形断面を持つ管を備える
ことを特徴とする請求項1〜6のいずれか1項に記載の近接センサ。 - 前記管が、反射内部表面を持つ中空管を備える
ことを特徴とする請求項1〜7のいずれか1項に記載の近接センサ。 - 前記管が、固体材料を備え、該管の材料と周辺材料との間のインターフェースにおける実質的な量の入射光が内部全反射されるように配置された
ことを特徴とする請求項1〜7のいずれか1項に記載の近接センサ。 - 前記光源がLEDを備える
ことを特徴とする請求項1〜9のいずれか1項に記載の近接センサ。 - 前記光源がLEDのアレイを備える
ことを特徴とする請求項1〜10のいずれか1項に記載の近接センサ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB0226243A GB2395262A (en) | 2002-11-11 | 2002-11-11 | Optical proximity sensor with array of spot lights and a mask |
| PCT/GB2003/004861 WO2004044619A2 (en) | 2002-11-11 | 2003-11-11 | Proximity sensor |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006505783A JP2006505783A (ja) | 2006-02-16 |
| JP2006505783A5 JP2006505783A5 (ja) | 2006-12-28 |
| JP4533147B2 true JP4533147B2 (ja) | 2010-09-01 |
Family
ID=9947579
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004550804A Expired - Fee Related JP4533147B2 (ja) | 2002-11-11 | 2003-11-11 | 近接センサ |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7459670B2 (ja) |
| EP (1) | EP1561125A2 (ja) |
| JP (1) | JP4533147B2 (ja) |
| CN (1) | CN100340868C (ja) |
| AU (1) | AU2003283542A1 (ja) |
| GB (1) | GB2395262A (ja) |
| WO (1) | WO2004044619A2 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2395289A (en) * | 2002-11-11 | 2004-05-19 | Qinetiq Ltd | Structured light generator |
| WO2006033945A2 (en) * | 2004-09-16 | 2006-03-30 | Mar-Rog Specialties, Inc. | Spotlight mounted motion detector |
| US20100133424A1 (en) * | 2007-05-26 | 2010-06-03 | Norman Matheson Lindsay | Electro-optical sensors |
| IL187637A (en) | 2007-11-26 | 2014-11-30 | Israel Aerospace Ind Ltd | A system and method for detecting proximity to the target |
| JP4837105B2 (ja) * | 2010-01-22 | 2011-12-14 | 株式会社東芝 | 電子機器および制御方法 |
| US9148995B2 (en) * | 2010-04-29 | 2015-10-06 | Hagie Manufacturing Company | Spray boom height control system |
| CN102401901B (zh) * | 2010-09-16 | 2014-09-10 | 原相科技股份有限公司 | 测距系统及测距方法 |
| US8599018B2 (en) | 2010-11-18 | 2013-12-03 | Yael Debra Kellen | Alarm system having an indicator light that is external to an enclosed space for indicating the time elapsed since an intrusion into the enclosed space and method for installing the alarm system |
| US8624735B2 (en) | 2010-11-18 | 2014-01-07 | Yael Debra Kellen | Alarm system having an indicator light that is external to an enclosed space for indicating the specific location of an intrusion into the enclosed space and a method for installing the alarm system |
| US20120162636A1 (en) * | 2010-12-23 | 2012-06-28 | Silicon Laboratories, Inc. | Proximity detector including anti-falsing mechanism |
| US8892163B2 (en) * | 2012-03-06 | 2014-11-18 | Omni Vision Technologies, Inc. | Image sensor having a pulsed mode of operation |
| US9123222B2 (en) * | 2012-03-15 | 2015-09-01 | Ninve Jr. Inc. | Apparatus and method for detecting tampering with an infra-red motion sensor |
| US8946620B2 (en) | 2012-10-16 | 2015-02-03 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Proximity sensor device with internal channeling section |
| US9151865B2 (en) * | 2013-02-04 | 2015-10-06 | Fraba Nv | Method and system for sensing light reflective surfaces in a reflective photo-electric sensing system including a light channeling device and a foreground suppression performance |
| US9772398B2 (en) * | 2014-06-26 | 2017-09-26 | Intersil Americas LLC | Optical proximity sensors with reconfigurable photodiode array |
| US9921297B2 (en) * | 2014-11-24 | 2018-03-20 | The Boeing Company | Range enhancement for LIDAR system and IR camera systems |
| JP6607709B2 (ja) * | 2015-06-08 | 2019-11-20 | ローム株式会社 | 近接センサ |
| US10502830B2 (en) | 2016-10-13 | 2019-12-10 | Waymo Llc | Limitation of noise on light detectors using an aperture |
| US11561284B2 (en) * | 2018-11-02 | 2023-01-24 | Waymo Llc | Parallax compensating spatial filters |
| US11364456B2 (en) | 2019-03-01 | 2022-06-21 | Brita Lp | Container assembly |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3786238A (en) * | 1972-09-05 | 1974-01-15 | Addressograph Multigraph | Optical reader |
| US4020327A (en) * | 1976-01-30 | 1977-04-26 | Bell Telephone Laboratories, Incorporated | Apparatus for reading optical codes |
| US4294544A (en) | 1979-08-03 | 1981-10-13 | Altschuler Bruce R | Topographic comparator |
| JPS627019A (ja) | 1985-07-04 | 1987-01-14 | Fuyo Sangyo:Kk | 表示装置 |
| FR2585853B1 (fr) | 1985-08-01 | 1988-01-29 | Amoretti Christian | Dispositif generateur d'effets lumineux modules par un signal audio et procede pour fabriquer des enregistrements video ou des films. |
| JPH0643893B2 (ja) * | 1986-06-11 | 1994-06-08 | キヤノン株式会社 | 距離測定装置 |
| DE3642051A1 (de) | 1985-12-10 | 1987-06-11 | Canon Kk | Verfahren zur dreidimensionalen informationsverarbeitung und vorrichtung zum erhalten einer dreidimensionalen information ueber ein objekt |
| JPS63263412A (ja) * | 1987-04-21 | 1988-10-31 | Mitsutoyo Corp | 非接触変位計 |
| US5003166A (en) | 1989-11-07 | 1991-03-26 | Massachusetts Institute Of Technology | Multidimensional range mapping with pattern projection and cross correlation |
| US5175601A (en) | 1991-10-15 | 1992-12-29 | Electro-Optical Information Systems | High-speed 3-D surface measurement surface inspection and reverse-CAD system |
| US5585626A (en) * | 1992-07-28 | 1996-12-17 | Patchen, Inc. | Apparatus and method for determining a distance to an object in a field for the controlled release of chemicals on plants, weeds, trees or soil and/or guidance of farm vehicles |
| US5793035A (en) * | 1992-07-28 | 1998-08-11 | Patchen, Inc. | Apparatus and method for spraying herbicide on weeds in a cotton field |
| JPH06137862A (ja) * | 1992-10-23 | 1994-05-20 | Omron Corp | 光学式センサ |
| DE4304815A1 (de) | 1993-02-17 | 1994-08-18 | Leitz Mestechnik Gmbh | Optischer Sensor |
| JPH06251669A (ja) * | 1993-02-25 | 1994-09-09 | Fuji Electric Co Ltd | 反射形光電スイッチ |
| JPH06249649A (ja) * | 1993-03-01 | 1994-09-09 | Rohm Co Ltd | 三角測距式光電センサ |
| JP2699805B2 (ja) | 1993-05-14 | 1998-01-19 | 日本電気株式会社 | 光検出器および光発信器 |
| JPH07225282A (ja) * | 1994-02-09 | 1995-08-22 | Tokai Rika Co Ltd | 物体検出装置 |
| ES2182907T3 (es) | 1994-06-14 | 2003-03-16 | Visionix Ltd | Aparato para cartografiar elementos opticos. |
| US6147760A (en) | 1994-08-30 | 2000-11-14 | Geng; Zheng Jason | High speed three dimensional imaging method |
| JP3297968B2 (ja) * | 1994-09-14 | 2002-07-02 | オムロン株式会社 | 限定反射型光電センサ |
| US5675407A (en) | 1995-03-02 | 1997-10-07 | Zheng Jason Geng | Color ranging method for high speed low-cost three dimensional surface profile measurement |
| US5852672A (en) | 1995-07-10 | 1998-12-22 | The Regents Of The University Of California | Image system for three dimensional, 360 DEGREE, time sequence surface mapping of moving objects |
| US5726443A (en) * | 1996-01-18 | 1998-03-10 | Chapman Glenn H | Vision system and proximity detector |
| SE9601742L (sv) | 1996-05-07 | 1997-11-08 | Besam Ab | Sätt att bestämma avstånd och läge för ett föremål |
| JPH1026524A (ja) * | 1996-07-10 | 1998-01-27 | Omron Corp | 測距センサ、測距ユニット並びに紙葉類搬送装置、自動検査装置及び印刷装置 |
| JPH1031073A (ja) | 1996-07-16 | 1998-02-03 | Nissan Motor Co Ltd | 近接センサ |
| JPH1062161A (ja) * | 1996-08-20 | 1998-03-06 | Omron Corp | 測距センサ、測距ユニット並びに紙葉類搬送装置、自動検査装置及び印刷装置 |
| DE19640935A1 (de) * | 1996-10-04 | 1998-04-09 | Alsthom Cge Alcatel | Optisches Kabel oder optisches Element |
| US6154279A (en) | 1998-04-09 | 2000-11-28 | John W. Newman | Method and apparatus for determining shapes of countersunk holes |
| US6707555B1 (en) | 1998-10-15 | 2004-03-16 | Sysmex Corporation | Optical information measuring apparatus |
| AU1410600A (en) * | 1998-11-27 | 2000-06-19 | Hamamatsu Photonics K.K. | Driver sensor and apparatus for controlling air bag |
| TW380213B (en) | 1999-01-21 | 2000-01-21 | Ind Tech Res Inst | Illumination apparatus and image projection apparatus includes the same |
| US6410872B2 (en) * | 1999-03-26 | 2002-06-25 | Key Technology, Inc. | Agricultural article inspection apparatus and method employing spectral manipulation to enhance detection contrast ratio |
| JP2000338247A (ja) * | 1999-05-31 | 2000-12-08 | Hamamatsu Photonics Kk | 物体検知装置、乗員検知装置及びエアバッグ制御装置 |
| DE10006493C2 (de) * | 2000-02-14 | 2002-02-07 | Hilti Ag | Verfahren und Vorrichtung zur optoelektronischen Entfernungsmessung |
| DE10011046A1 (de) | 2000-03-07 | 2001-10-04 | Omron Electronics Mfg Of Germa | Verfahren zum Erfassen von Abständen von Objekten mittels eines Triangulations-Sensors und Triangulations-Sensor zum Durchführen des Verfahrens |
| US6377353B1 (en) | 2000-03-07 | 2002-04-23 | Pheno Imaging, Inc. | Three-dimensional measuring system for animals using structured light |
| US6564086B2 (en) | 2000-05-03 | 2003-05-13 | Rocky Mountain Biosystems, Inc. | Prosthesis and method of making |
| US6393898B1 (en) * | 2000-05-25 | 2002-05-28 | Symyx Technologies, Inc. | High throughput viscometer and method of using same |
| JP2001339287A (ja) * | 2000-05-25 | 2001-12-07 | Nidec Copal Corp | 光電センサ装置 |
| NL1016617C2 (nl) | 2000-11-15 | 2002-05-16 | Univ Delft Tech | Inrichting en werkwijze voor het bepalen van een driedimensionale vorm van een object. |
| GB2372656A (en) | 2001-02-23 | 2002-08-28 | Ind Control Systems Ltd | Optical position determination |
| DE10149750A1 (de) | 2001-03-09 | 2002-09-19 | Tecmath Ag | Handgeführter 3D-Scanner |
| US6926435B2 (en) * | 2001-08-23 | 2005-08-09 | Wavien, Inc. | Led illumination engine using a reflector |
| US6949758B2 (en) * | 2001-10-19 | 2005-09-27 | Visteon Global Technologies, Inc. | LCC-based fluid-level detection sensor |
-
2002
- 2002-11-11 GB GB0226243A patent/GB2395262A/en not_active Withdrawn
-
2003
- 2003-11-11 JP JP2004550804A patent/JP4533147B2/ja not_active Expired - Fee Related
- 2003-11-11 AU AU2003283542A patent/AU2003283542A1/en not_active Abandoned
- 2003-11-11 WO PCT/GB2003/004861 patent/WO2004044619A2/en active Application Filing
- 2003-11-11 US US10/534,494 patent/US7459670B2/en not_active Expired - Fee Related
- 2003-11-11 EP EP03775516A patent/EP1561125A2/en not_active Withdrawn
- 2003-11-11 CN CNB2003801084767A patent/CN100340868C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN100340868C (zh) | 2007-10-03 |
| GB0226243D0 (en) | 2002-12-18 |
| WO2004044619A2 (en) | 2004-05-27 |
| JP2006505783A (ja) | 2006-02-16 |
| US7459670B2 (en) | 2008-12-02 |
| WO2004044619A3 (en) | 2004-08-05 |
| GB2395262A (en) | 2004-05-19 |
| CN1735817A (zh) | 2006-02-15 |
| US20060163455A1 (en) | 2006-07-27 |
| AU2003283542A8 (en) | 2004-06-03 |
| AU2003283542A1 (en) | 2004-06-03 |
| EP1561125A2 (en) | 2005-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4533147B2 (ja) | 近接センサ | |
| US7741597B2 (en) | Motion sensor with LED alignment aid | |
| AU2004291813B2 (en) | Proximity detector | |
| EP1561084B1 (en) | Structured light projector | |
| JP6303388B2 (ja) | 限定領域反射型光学センサ及び電子機器 | |
| KR20010041694A (ko) | 물체 위치 검출용 광 센서 시스템 | |
| CN101228564B (zh) | 用于检测表面上液体的传感器装置 | |
| JP2021534379A (ja) | 少なくとも1つの領域を光学的に監視する装置及び方法 | |
| JP2001517843A (ja) | 散乱放射方式による煙報知器 | |
| US11913864B2 (en) | Smoke detector with increased scattered light intensity | |
| JP2021067582A5 (ja) | ||
| JP6414351B2 (ja) | 限定領域反射型光学センサ及び電子機器 | |
| JP5058928B2 (ja) | 光電センサ | |
| WO2023139021A1 (en) | Lighting device with sensor | |
| MXPA06005438A (en) | Proximity detector |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090914 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20091209 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20091216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100517 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100611 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130618 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |